___________________________________________________________________________________________________________________________
Recenzent: Prof. dr hab. inż. Andrzej Grono – Wydział Elektrotechniki i Automatyki
Politechnika Gdańska
Zeszyty Naukowe Wydziału Elektrotechniki i Automatyki Politechniki Gdańskiej
XVII Seminarium
ZASTOSOWANIE KOMPUTERÓW W NAUCE I TECHNICE’ 2007
Oddział Gdański PTETiS
Referat nr 4
SYMULATOR ROBOTA MOBILNEGO W ŚRODOWISKU MATLAB-SIMULINK
Mariusz DĄBKOWSKI
1.
Politechnika Gdańska, ul. G. Narutowicza 11/12, 80-925 Gdańsk,
tel: (058) 347 1435
fax: (058) 347 1802
e-mail: mardab@ely.pg.gda.pl
Streszczenie:
Opisano
symulator
robota
mobilnego
opracowanego w środowisku MATLAB-SIMULINK. Podano
główne przesłanki do opracowania aplikacji oraz jej najważniejsze
zadania. Przedstawiono strukturę symulatora składającego się z
czterech głównych bloków. Opisano model fizycznej platformy
robota mobilnego oraz zależności matematyczne pozwalające
rozwiązać zagadnienie kinematyki i dynamiki odwrotnej ruchu
urządzenia na płaszczyźnie. Opisano sposób implementacji
układów odometrycznej realizacji pomiarów przebytej drogi oraz
prędkości ruchu urządzenia. W referacie przedstawiono również
model czujnika do pomiaru odległości – sonaru. Ponadto podano
również wyniki badań uzyskanych za pomocą opisanego
symulatora w postaci kolejnych punktów położenia robota
mobilnego na płaszczyźnie, realizującego zadanie całkowitego
pokrycia powierzchni w otoczeniu przeszkód ruchomych.
Przedyskutowano zalety oraz wady przedstawionej aplikacji,
a także zwrócono uwagę na możliwe kierunki jej rozwoju.
Słowa kluczowe: robotyka, robotyka mobilna.
1.
WSTĘP
Symulator robota mobilnego, opisany w niniejszym
artykule, został opracowany w celu przeprowadzenia badań
weryfikacyjnych
zaprojektowanego
uprzednio
behawioralnego systemu sterowania robota, pozwalającego
unikać zderzeń z przeszkodami ruchomymi podczas
wykonywania zadania całkowitego pokrycia nieznanej
powierzchni. Główną przesłanką do jego zbudowania był
brak rzeczywistego urządzenia, które pozwoliłoby na
przeprowadzenie testów układu sterowania.
Symulator robota mobilnego stanowi aplikację
komputerową opracowaną w środowisku MATLAB-
SIMULINK, w której zaimplementowano zaczerpnięte
z literatury
modele
elementów
składowych
robota
(platformy, układu napędowego, pomiarowego, a także
ś
rodowiska zewnętrznego – sceny oraz przeszkód
ruchomych). Należy podkreślić, że odzwierciedlono w niej
jedynie
niezbędne,
z
punktu
widzenia
badań
weryfikacyjnych
nad
systemem
sterowania
robota
mobilnego, cechy fizyczne. Niemniej jednak, starano się
stosować jak najmniej uproszczeń, aby symulator możliwie
wiernie odzwierciedlał rzeczywiste elementy urządzenia.
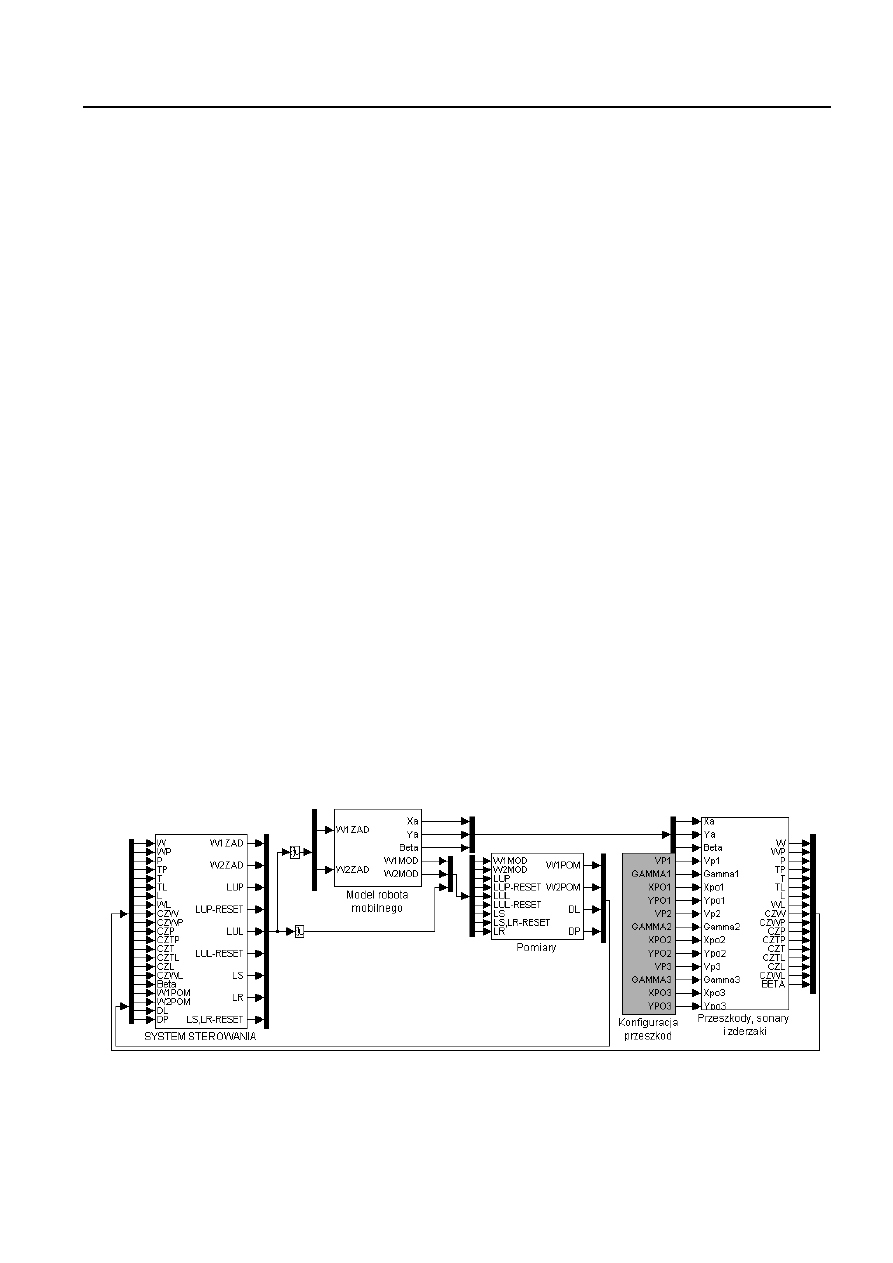
Schemat graficzny symulatora przedstawiono na rysunku 1
[1].
Rys. 1. Blokowa struktura symulatora robota mobilnego dla potrzeb rozwiązania problemu unikania kolizji z przeszkodami ruchomymi
podczas wykonywania zadania całkowitego pokrycia powierzchni terenu wraz z nadrzędnym systemem sterowania: 1 – nadrzędny
system sterowania; 2 – model kinematyki i dynamiki robota mobilnego; 3 – układ pomiaru prędkości obrotowej, przebytej drogi,
zliczania ucieczek, skrętów oraz ruchów na zadaną odległość do przodu lub do tyłu; 4 – interfejs konfiguracji parametrów początkowych
ruchu przeszkód ruchomych; 5 – modele przeszkód ruchomych, czujników zbliżeniowych i zderzeniowych [1]
1
2
3
4
5
- 24 -
W
referacie
opisano
jedynie
bloki
zawierające
implementacje modeli elementów fizycznych urządzenia
bez opisu nadrzędnego system sterowania. Wyczerpujące
informacje na temat jego budowy można znaleźć w [1].
2.
BLOK „MODEL ROBOTA MOBILNEGO”
Zaimplementowany w symulatorze model robota
wzorowany jest na budowie robota mobilnego TALRIK II.
Przyjęto, że platforma mobilna ma kształt koła, a układ
napędowy stanowią dwa koła napędzane umieszczone w
jednakowej odległości od środka robota i pracujące w
konfiguracji różnicowej. Trzecie koło jest samonastawne i
stanowi tylko punkt podparcia [1].
Blok składa się z pięciu podstawowych członów:
−
„układu ograniczania szybkości narastania sygnałów
referencyjnych” – w którym formowany jest sygnał
wejściowy, czyli wektor dwóch prędkości zadanych:
koła lewego i prawego, pochodzących z systemu
sterowania,
−
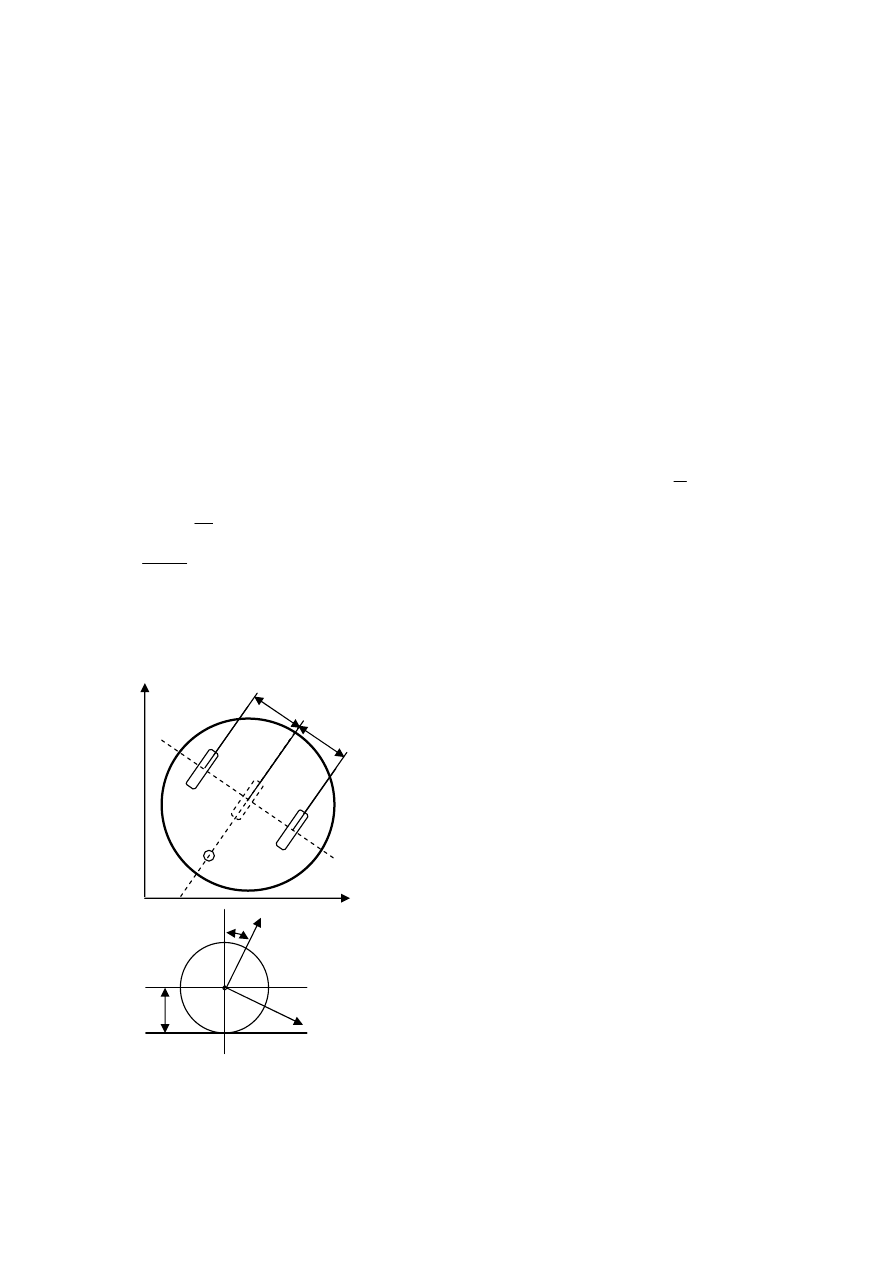
„modelu kinematyki robota” – bloku, stanowiącego
odzwierciedlenie uproszczonego zadania kinematyki
odwrotnej (rys. 2 a, b) [2]
1
1
2
2
)
(
l
r
α
α
β
&
&
&
−
=
(1)
2
2
1
α
α
α
&
&
&
+
=
(2)
gdzie:
β
& – prędkość obrotu platformy,
α
α
α
&
&
&
,
,
2
1
– prędkości
odpowiednio: koła lewego, prawego i zastępczego,
r – promień
koła,
l
1
– odległość koła od środka robota
Rys. 2. Model robota mobilnego Talrik II: a) platforma
mobilna; b) koło;1 – koło lewe; 2 – koło prawe; 1z – koło
zastępcze; A – środek ciężkości ramy oraz geometryczny
ś
rodek koła zastępczego 1z; B, C – geometryczne
ś
rodki kół 1, 2 [2]
−
układu regulacji nadążnej i modelu dynamiki” –
zawierającego implementację modelu dynamiki robota
jako
układu
nieholonomicznego
opisanego
równaniami Lagrange’a II rodzaju z mnożnikami
w formie odsprzężonej oraz układu regulacji nadążnej
z linearyzacją przez sprzężenie zwrotne [2]
(
)
(
)
1
2
2
1
1
2
1
2
1
1
1
4
2
1
1
2
2
2
h
f
N
f
N
M
M
h
I
I
I
l
m
z
x
z
+
−
−
=
=
+
+
+
β
&
&
(3)
(
)
[
]
2
2
1
1
2
1
1
2
4
1
2
2
f
N
f
N
M
M
I
r
m
m
z
−
−
+
=
=
+
+
α
&
&
(4)
gdzie:
M
1
,
M
2
– momenty napędzające koła: lewe i prawe
I
x1
=
I
x2
– zastępcze masowe momenty bezwładności kół 1 i 2
określone względem osi
x
1
i
x
2
związanymi z tymi kołami,
I
z1
=
I
z2
– zastępcze masowe momenty bezwładności kół 1 i 2
określone względem osi obrotu własnego tych kół,
m
4
– masa ramy,
I
z4
– zastępczy masowy moment bezwładności
ramy określony względem osi związanej z ramą,
N
1
,
N
2
– siły nacisku na koła odpowiednio 1 i 2,
f
1
,
f
2
–
współczynniki tarcia toczenia kół,
M
1
,
M
2
– momenty napędzające
koła,
r
1
=
r
2
=
r – promień kół, l
1
,
1
1
l
r
h
=
– odległości oraz
współczynnik wynikające z geometrii układu
−
„modelu sił tarcia” – w którym zawarto formuły
matematyczne pozwalające wyliczyć siły tarcia na
styku koła zastępczego z jezdnią podczas ruchu
robota, potrzebne do określenia maksymalnego
możliwego do uzyskania przyspieszenia urządzenia,
przy którym nie zachodzi zerwanie przyczepności [2],
−
„układu
formowania
sygnałów
wyjściowych
z modelu” – w którym odzwierciedlono wzory
matematycznych pozwalające określić położenie
robota w nieruchomym układzie współrzędnych XY
oraz prędkości poszczególnych kół.
3.
BLOK „POMIARY”
W
symulatorze
zaimplementowano
następujące
pomiary: odległości robota od przeszkód (sensory
ultradźwiękowe),
przebytej
drogi
przez
urządzenie
i prędkości
kątowej
poszczególnych
kół
(układy
odometryczne) oraz liczby zrealizowanych manewrów
(skrętów, ruchów do przodu, do tyłu i ucieczek – liczniki).
Idea działania układu odometrycznego pomiaru
przebytej drogi polega na wykorzystaniu prostej zasady
zliczania impulsów, która może być wykorzystana zarówno
do budowy układów określania długości przebytej drogi,
jak też do pomiaru prędkości [3]. Natomiast wartość
długości drogi pokonanej przez robota wyznaczana jest na
podstawie
ś
redniej
arytmetycznej
wartości
dróg
pokonanych przez poszczególne koła. Wartość średniej
prędkości liniowej ruchu robota wyliczana jest na
podstawie pomiaru wartości przebytej przez robota drogi w
danej jednostce czasu. Układy zliczające mają postać
prostych liczników.
X
.
.
.
A
C
B
.
l
1
l
1
ββββ
1
2
1z
Y
(a)
αααα
1,2
x
1,2
y
1,2
r
C
B
(b)
- 25 -
4.
BLOK „PRZESZKODY, SONARY I ZDERZAKI”
4.1.
Blok „przeszkody”
W wyniku analizy zadań do wykonania przez robota,
przyjęto, że do robota mogą zbliżać się maksymalnie trzy
obiekty dynamiczne w kształcie kół o określonych
ś
rednicach, które poruszają się ruchem jednostajnym po
linii prostej. W bloku „przeszkody” zdefiniowano ich ruch
za pomocą równań kinematyki określających współrzędne
położenia
punktów
charakterystycznych
(środków
geometrycznych) w czasie [4]. Wartości wielkości takich
jak: współrzędne punktu początkowego – x
0i
,
y
0i
, prędkość –
V
i
,, kierunek ruchu –
γ
i
są określane przez użytkownika
symulatora w bloku „konfiguracja przeszkód” (rys. 1 – blok
numer 5), który stanowi prosty interfejs użytkownika.
4.2.
Blok „sonary i zderzaki”
Blok „sonary i zderzaki” jest najważniejszy, z punktu
widzenia akwizycji wiedzy o środowisku zewnętrznym.
Zamodelowano w nim sposób działania 8 sensorów
zbliżeniowych oraz 8 zderzeniowych rozmieszczonych na
obwodzie platform mobilnej co 45
0
.
W
aplikacji
komputerowej
symulatora
zaimplementowano
model
analogowego
czujnika
ultradźwiękowego UM-30-3000A-HP firmy SELS [5]. Na
rysunku 3 zobrazowano graficznie strefy wykrywania przez
czujnik
ultradźwiękowy
przeszkód
ruchomych
i
nieruchomych.
Wartość odległość robota od przeszkody obliczana
jest na podstawie znajomości położenia środków: robota i
przeszkód oraz orientacji robota, czyli usytuowania stref
wykrywania
obiektów
poszczególnych
czujników
rozmieszczonych na obwodzie platformy względem
przeszkód w globalnym układzie współrzędnych.
Zasada działania zamodelowanych w s-funkcji
sensorów zderzeniowych polega na wykrywaniu kolizji,
które dokonywane jest na podstawie monitorowania
wartości
sygnałów
odległości
i
wystawianiu
„1”
w przypadku zderzenia (odległość od przeszkody równa 0),
a w przeciwnym – „0” [1].
Rys. 3. Układ współrzędnych związany z czujnikiem oraz funkcje
liniowe aproksymujące granice obszarów detekcji w lokalnym
układzie kartezjańskim: 1, 1’ – funkcje graniczne obszaru detekcji
przeszkód nieruchomych, 2, 2’, 3, 3’, 4, 4’ – funkcje graniczne
obszaru detekcji przeszkód ruchomych [5]
Fizyczne
granice
obszaru
roboczego
(ściany)
zdefiniowano również w s-funkcji, jako boki kwadratu
o długości 4 m [1].
5.
BADANIA WERYFIKACYJNE SYMULATORA
Badania weryfikacyjne zaprojektowanego symulatora
robota mobilnego przeprowadzono po włączeniu w jego
strukturę
behawioralnego
systemu
sterowania.
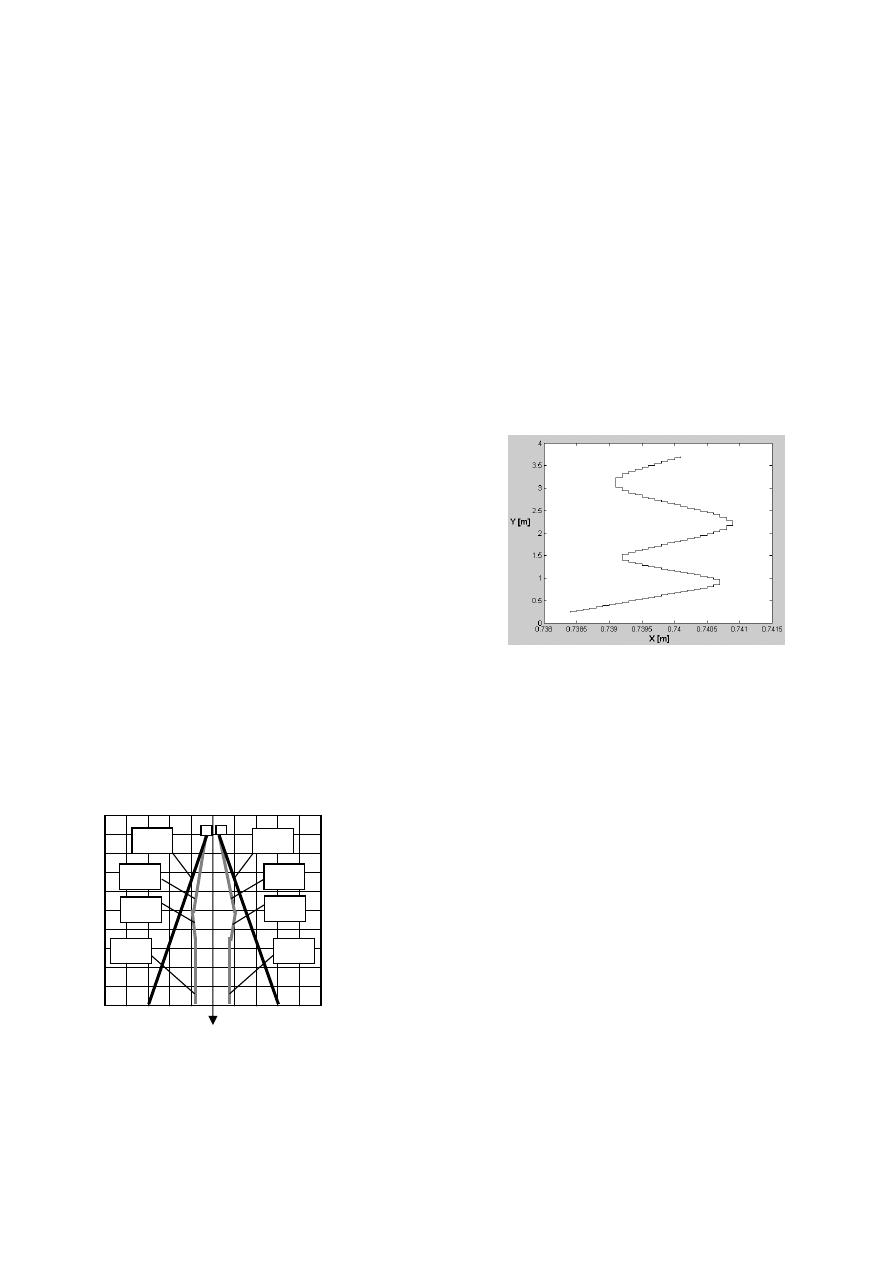
Przeprowadzono szereg symulacji połączonych aplikacji, w
wyniku których otrzymano ścieżki ruchu robota na
płaszczyźnie. Na rysunku 4 przedstawiono przykładowy,
graficzny zapis drogi pokonanej przez robota sterowanego
przez nadrzędny układ sterowania, a ściślej przez
zachowania ruchu do przodu oraz ruchu wzdłuż ściany.
Ś
cieżka wyznaczona została na podstawie rzutów
chwilowych punktów położenia środka platformy na
powierzchnię terenu.
Rys. 4. Graficzne przedstawienie ścieżki ruchu robota pomiędzy
nawrotami [1]
Uzyskany wynik jest zgodny z oczekiwaniami, co
pokazuje, że zarówno układ sterowania, jak i symulator
robota jest zaprojektowany poprawnie. Można stwierdzić,
ż
e symulator spełnił swoją główną funkcję, a więc
umożliwił poprawne testowanie zbudowanego układu
sterowania. Ponadto poprawny przebieg symulacji ruchu
robota pozwolił stwierdzić, że zaimplementowane modele
sensorów ultradźwiękowych umożliwiają w sposób
prawidłowy
wykrywanie
przeszkód
ruchomych
i
nieruchomych,
a
zderzeniowych
–
właściwe
sygnalizowanie kolizji. Układy odometrii z kolei poprawnie
mierzą odległość przebytą przez robota, jego orientację na
powierzchni terenu, a także prędkość.
6.
PODSUMOWANIE I WNIOSKI
W referacie przedstawiono strukturę symulatora
robota mobilnego zawierającego implementacje modeli,
niezbędnych
do
działania
urządzenia,
elementów:
platformy, układu napędowego, pomiarowego oraz świata
zewnętrznego.
Zaletą opisanego symulatora jest modułowa struktura,
która
zapewnia
dużą
elastyczność
użytkowania.
Poszczególne bloki mogą być swobodnie zastępowane
innymi (układy sterowania, modele kinematyki ruchu
- 0 cm
- 30 cm
- 60 cm
- 90 cm
- 120 cm
- 150 cm
- 180 cm
- 210 cm
- 240 cm
- 300 cm
- 270 cm
X
S
1
1’
2
2’
3’
4’
3
4

- 26 -
platformy) bądź rozbudowywane (układy pomiarowe).
Dzięki temu można badać różne typy nadrzędnych
systemów sterowania na modelach robotów o innych
konfiguracjach
napędowych (np.: trójkołowych lub
czterokołowych). Możliwe jest również wzbogacanie
układu pomiarowego o modele innego rodzaju sensorów
(np.:
podczerwieni)
lub
też
wykorzystywanie
ich
zamiennie.
Należy pamiętać, że zaimplementowane modele są
tylko
przybliżeniem
fizycznych
urządzeń,
jednak
zakładając, że niezbędne, z punktu widzenia zastosowania,
cechy elementów zostały uwzględnione, można prowadzić
przy ich użyciu wiarygodne badania bez konieczności
kupna bardzo drogiego sprzętu, jakim jest robot mobilny.
Poza tym modele poszczególnych części składowych
platformy mogą być również modyfikowane, tak by
odzwierciedlały pożądane własności fizyczne, istotne dla
użytkownika.
Opisana w referacie aplikacja ze względu na wielkie
zalety, przy świadomości jej ograniczeń, może być z
powodzeniem użyta w procesie kształcenia studentów.
7.
BIBLIOGRAFIA
1.
Dąbkowski M.: Analiza jakości wykonania pokrycia
powierzchni terenu przez autonomicznego robota
mobilnego. 2006. Rozprawa doktorska. Politechnika
Gdańska. Wydział Elektrotechniki i Automatyki.
2.
Giergiel M. J., Hendzel Z., śylski W.: Modelowanie i
sterowanie mobilnych robotów kołowych. Warszawa:
Wydawnictwa Naukowe PWN 2002.
3.
Borenstein J., Everett H. R., Feng L.: Where am I? –
sensors and methods for mobile robot positioning. The
University of Michigan.1996.
4.
Craig J.: Wprowadzenie do robotyki. Mechanika
i sterowanie. Wydawnictwo Naukowo-Techniczne.
Warszawa: 1993.
5.
Strona internetowa: http://www.sels.com.pl. - 2005
MOBILE ROBOT SIUMULATOR IN MATLAB-SIMULINK ENVIRONMENT
In paper was described the mobile robot simulator developed in MATLAB-SIMULINK environment. The main premises
and tasks of the application was given. A structure of the simulator which contained four main blocks was showed. The
phisical model of the mobile robot platform was described and mathematical equations, which permit to solve an inverse
kinematic and dynamic problem of a robot’s movement on the terrain surface, was given. The way of an implementation of
the dead reckoning system, which allowed the measurement of path’s length and robot’s speed, was described. In paper the
model of the sonar also was showed. Furthermore results of tests obtaining by the simulator was given. Advantages and
disadvantages of the simulator were discussed and pointed out possible directions of the application’s delevelopment.
Wyszukiwarka
Podobne podstrony:
scenariusz 23 2007 Bobinska, scenariusze
scenariusz 23 2007 Krzyzanek, scenariusze
Cwiczenia 23 25 2007
2543 2007 2 17 23 01 07
Hakin9 23 (03 2007) PL
07 gestalt - kognitywizm 23.02.2007 - 02.03.2007, JĘZYKOZNAWSTWO, Notatki
Rozporządzenie Ministra Gospodarki z dnia 23 lipca 2007 kształtowanie taryf oraz rozliczeń
2007 02 23 wzorcowa umowa przylaczeniowa
Hydrodynamika środowiskowa z elementami mechani technicznej 23.11.2007, Inżynieria Ochrony Środowisk
2007.05.23 POS zagadnienia Wroclaw testy
Psychologia rozwojowa i kliniczna-zaliczenie 23.01.2007, psychologia, psychologia społeczna
ROK C, XXV niedziela zwykła, Modlitwa wiernych na dzień 23 września 2007
PSYCHOLOGIA wiczenia 1 23[1].02.2007, Fizjoterapia, Psychologia
Cw 23 Symulacja przerzutnikow cyfrowych
cwiczenia 5 23.11.2007 praca domowa 2, cwiczenia - dr skladowski
cwiczenia 5 23.11.2007 praca domowa, cwiczenia - dr skladowski
Symulacja komputerowa, zadania 2007
więcej podobnych podstron