Podstawy automatyki
Kraków 2009
Wykład 6
Podstawy automatyki
Regulatory
- człon/regulator typu P,
- człon/regulator typu I,
- człon typu D,
- regulator PID,
- regulator dwupołożeniowy,
Plan wykładu
Podstawy automatyki
Regulator - jeden z elementów składających się na obwód
regulacji. Zadanie regulatora polega na wygenerowaniu
odpowiedniego sygnału sterującego, aby obiekt regulowany w
jak najkrótszym czasie osiągał wartość zadaną.
Regulator służy do doprowadzenia obiektu do żądanego stanu
lub poprawy niekorzystnych cech obiektu regulowanego.
Regulator może np. poprawić dynamikę obiektu regulowanego
(silnik będzie szybciej osiągał żądaną prędkość). Błędne użycie
może prowadzić do niestabilności obwodu regulacji.
R(s)
u(t)
ε
(t)
Podstawy automatyki
Regulator P (ang. proportional controller) – w automatyce,
regulator składający się z jednego członu typu P
(proporcjonalnego), którego opisują wzory:
Na podstawie sygnału podawanego na wejście regulatora,
wytwarza on proporcjonalny sygnał sterujący, przy czym celem
jest utrzymanie wartości wyjściowej układu na pewnym z góry
zadanym poziomie, który jest zwany wartością zadaną (dążenie
do eliminacji uchybu regulacji).
Człon/Regulator typu P
R
P
s=k
p
ut =k
p
⋅
t
Podstawy automatyki
Układy regulacji z regulatorem typu P charakteryzują się
niezerowym uchybem ustalonym w przypadku, gdy
transmitancja zastępcza układu posiada jedynie bieguny
niezerowe – tym większym im większe jest wzmocnienie
regulatora. Wartość niezerowego uchybu dana jest wzorem:
y
zadany
– wartość zadanego sygnału sterującego,
k
p
– wzmocnienie regulatora,
k
o
– wzmocnienie obiektu.
Człon/Regulator typu P
∣
u
∣=
y
zadany
1k
p
⋅
k
o
Podstawy automatyki
Wartość sygnału sterującego w tym typie członu zależy od całki
sygnału wejściowego i dana jest wzorami (dla zerowych
warunków początkowych):
T
i
– czas zdwojenia.
Człon/Regulator typu I
R
I
s=
1
T
i
s
ut=
1
T
i
∫
0
t
d
Podstawy automatyki
Wartość sygnału wyjściowego zależy od pochodnej sygnału
wejściowego i dana jest wzorami:
T
d
– czas wyprzedzenia.
Człon typu D
R
D
s=T
d
s
ut=T
d
⋅
d t
dt
Podstawy automatyki
Regulator będący złożeniem członów P, I, D. Sygnał wyjściowy
określony jest wzorami:
Wersja 1
lub Wersja 2
Regulator PID
R
PID
s=k
p
1
1
T
i
s
T
d
s
ut=k
p
1
1
T
i
∫
0
t
d T
d
⋅
d t
dt
R
PID
s=k
p
1
1
T
i
s
T
d
s
ut=k
p
1
T
i
∫
0
t
d T
d
⋅
d t
dt
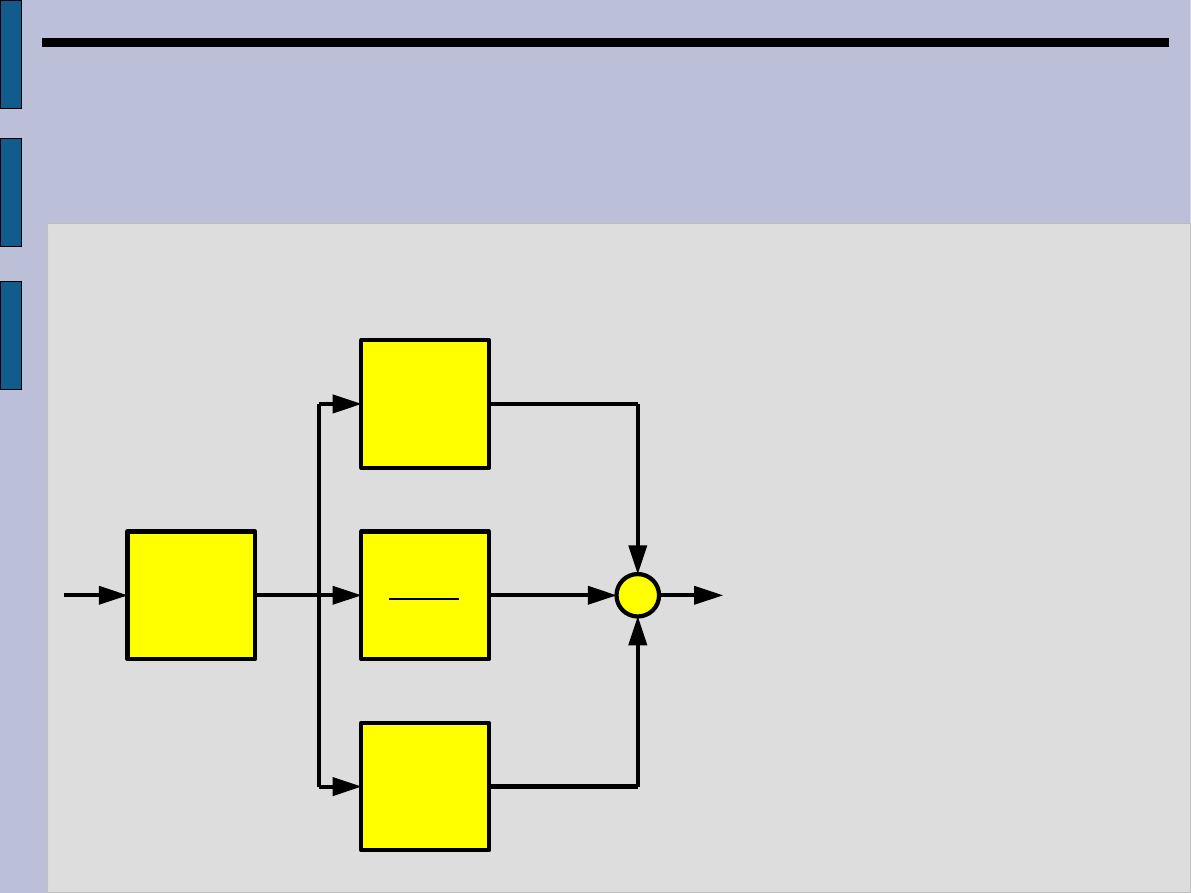
Podstawy automatyki
Schemat zastępczy dla Wersji 1
Regulator PID
+
+
+
T
d
s
k
p
1
T
i
s
1
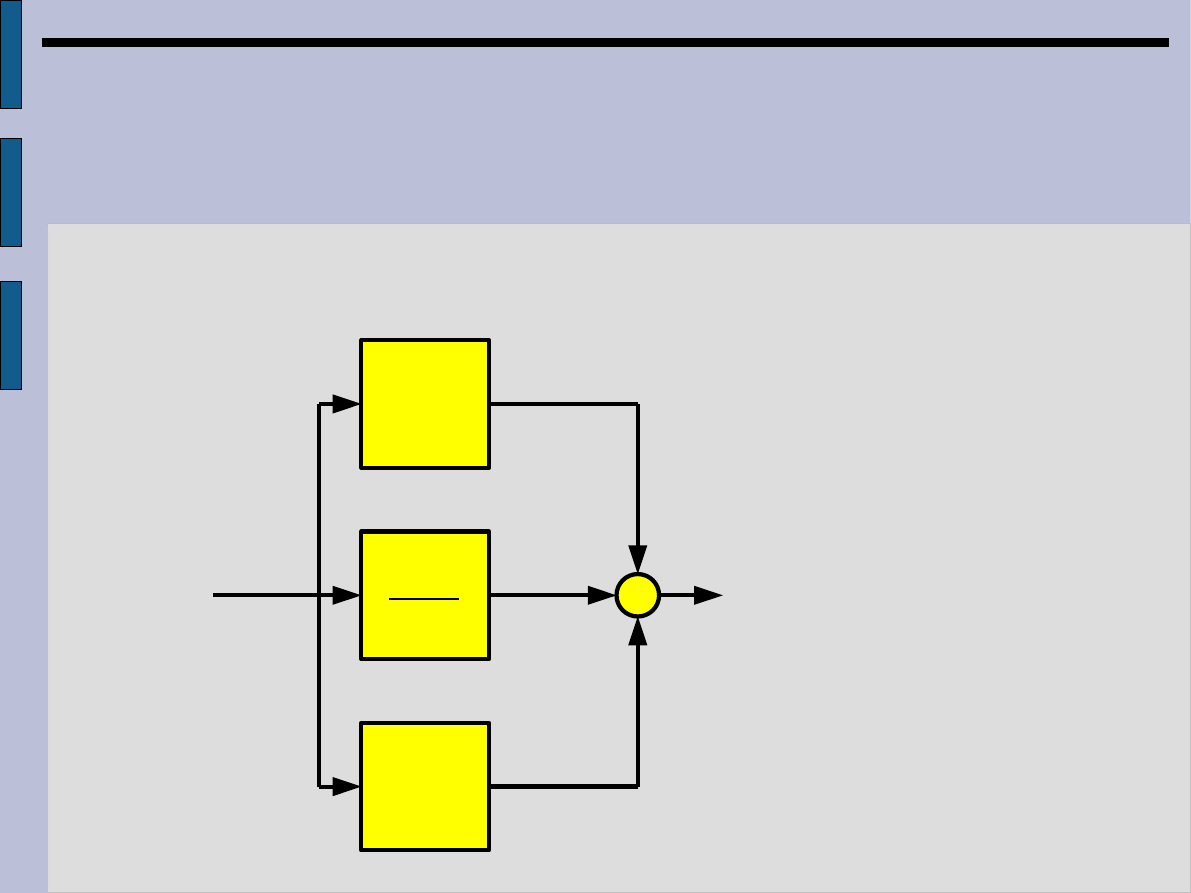
Podstawy automatyki
Schemat zastępczy dla Wersji 2
Regulator PID
+
+
+
T
d
s
k
p
1
T
i
s
Podstawy automatyki
W układach sterowania dwupołożeniowego, element
wykonawczy ma tylko dwa ustalone położenia, które w wielu
przypadkach polegają na załączeniu lub wyłączeniu urządzenia.
Sterowanie dwupołożeniowe jest stosunkowo proste i niedrogie
i z tych powodów jest szeroko stosowane zarówno w układach
sterowania przemysłowego jak i gospodarstwa domowego.
Regulator dwupołożeniowy
Podstawy automatyki
Sygnał sterujący przyjmuje dwie wartości:
Najczęściej stałe U
1
i U
2
przyjmują wartości:
Regulator dwupołożeniowy
ut =
{
U
1
dla t 0
U
2
dla t0
{
U
1
0
U
2
=−
U
1
{
U
1
0
U
2
=
0
Podstawy automatyki
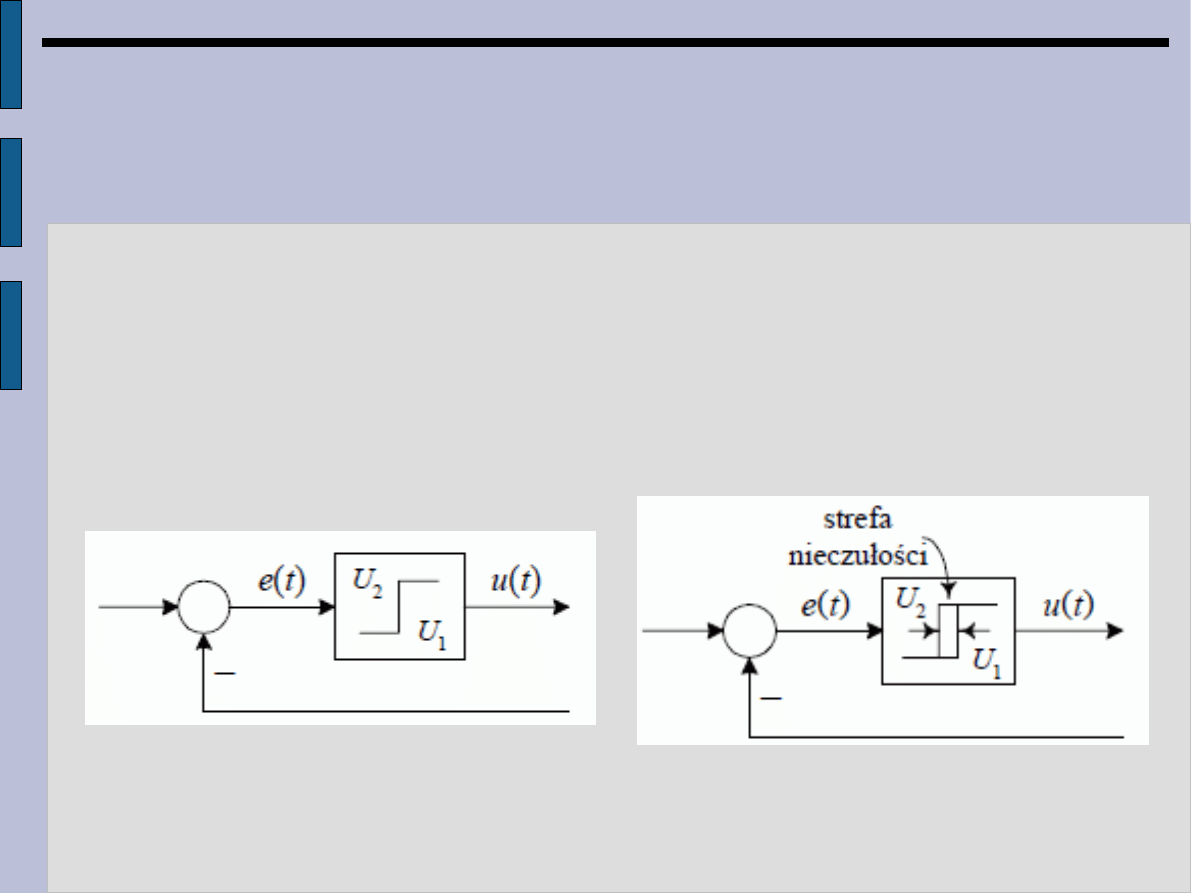
Regulator dwupołożeniowy
Strefa nieczułości
Bez strefy nieczułości
Ze strefą nieczułości
Podstawy automatyki
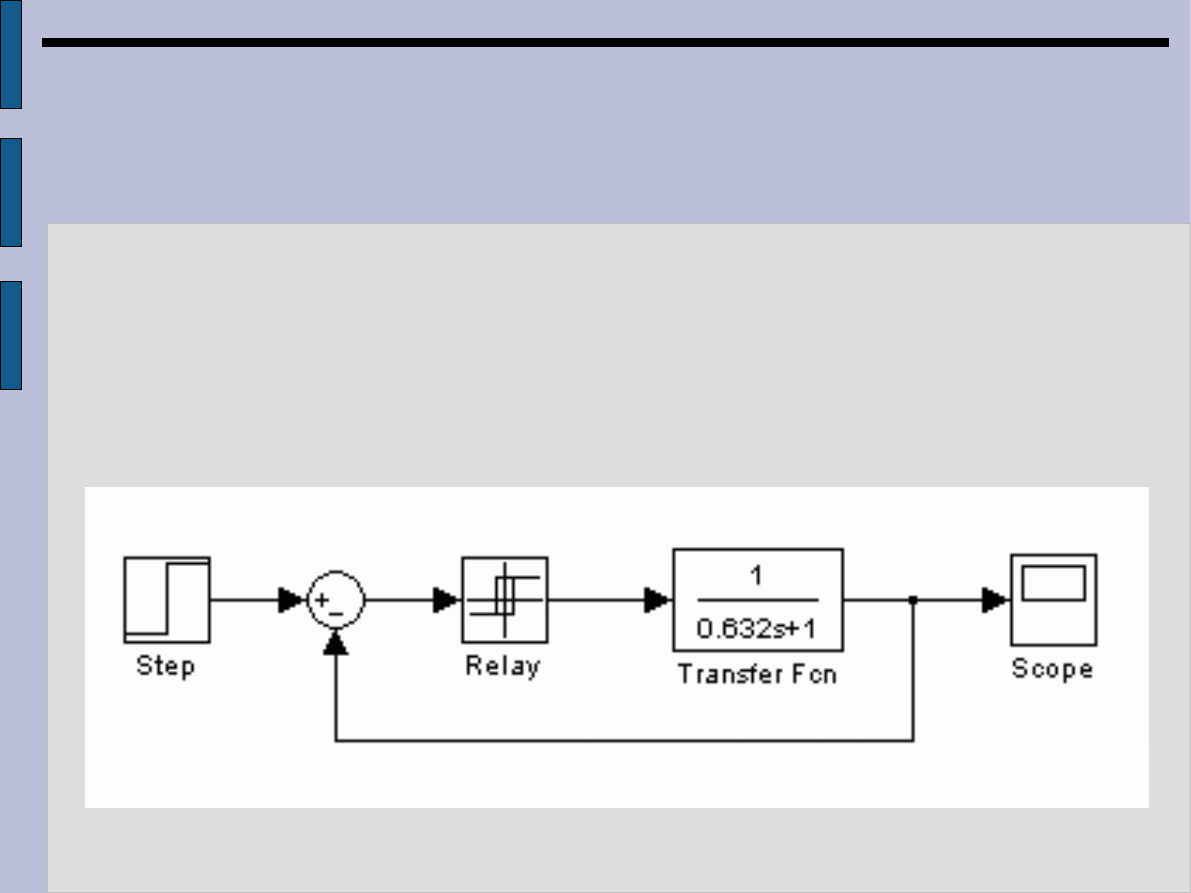
Regulator dwupołożeniowy
Zamknięty układ sterowania
Podstawy automatyki
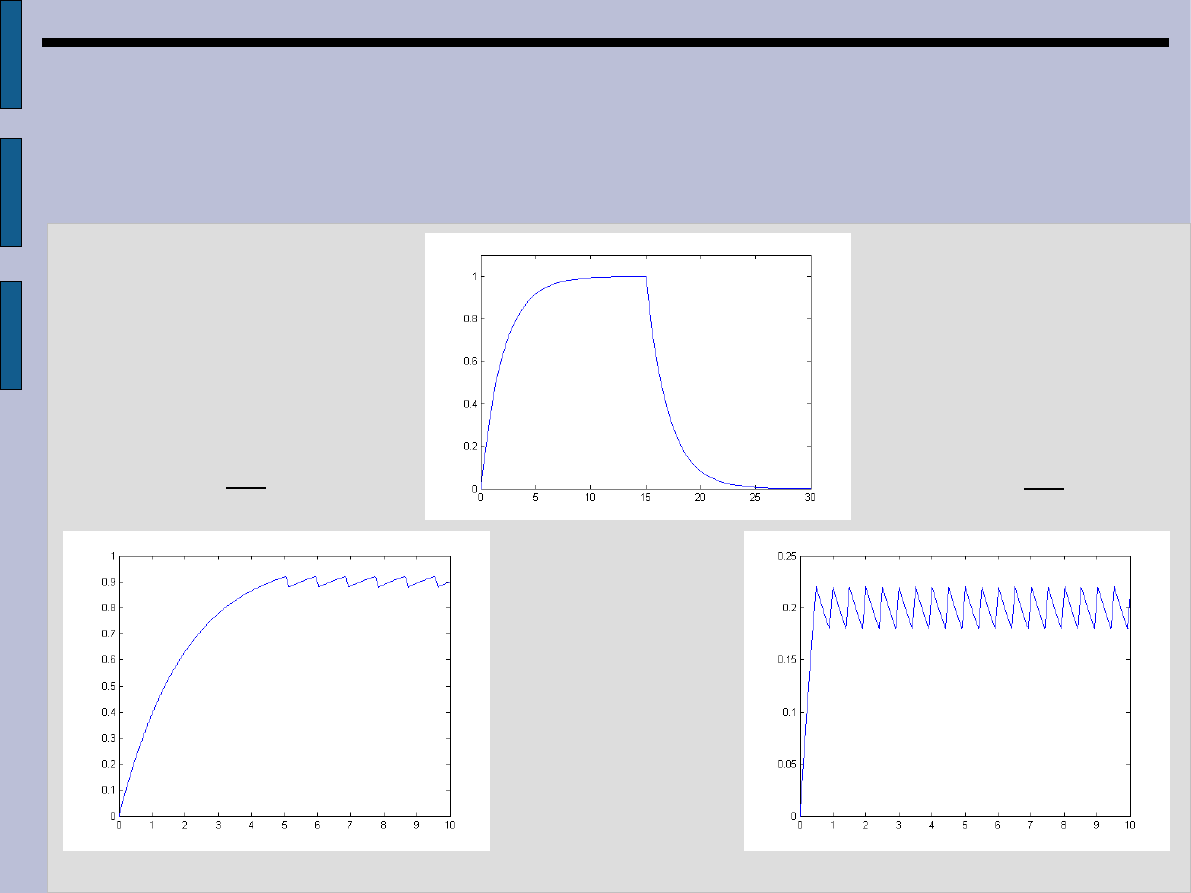
Regulator dwupołożeniowy - wykresy
Odpowiedź skokowa
obiektu regulacji
y
zadane
t =
2
10
y
ustalone
y
zadane
t =
9
10
y
ustalone
Dziękuję za uwagę
Podstawy automatyki
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
Wyszukiwarka
Podobne podstrony:
Podstawowe człony regulacji
Podstawy automatyki (w 3) regula id 366722
16 Podstawy automatyki regulatory optymalne
Podstawy automatyki i regulacji cd
ASEUT 2015 2016 MGR S1 PODSTAWOWE OBIEKTY REGULACJI W INSTALACJACH HYDRAULICZNYCH UCZ W1
Podstawy Neurobiologii regulamin
Ćw.2.Cyfrowy regulator PID, Elektrotechnika - notatki, sprawozdania, podstawy automatyki i regulacji
podstawy automatyki regulacja sprawozdanie
PodstawyProgramowania W06
Chorowski,podstawy automatyki, regulatory
Podstawowe człony regulacji
Podstawowe mechanizmy w regulacji gospodarki kwasowo zasadowej
Podstawy metrologii regulamin 2010 11
test i zad prakt (SZ.P), Konkurs informatyczny w szkole podstawowej (regulamin, punktacja, zagadnien
więcej podobnych podstron