
Metody sztucznej inteligencji
wykªad 4
(dla studentów Wydziaªu MT Politechniki laskiej
- na prawach rekopisu)
06 kwietnia 2006

Obliczanie prawdopodobie«stw zdarze«
Prawdopodobie«stwo, »e oboje John i Mary zadzwonia, je±li sªy-
cha¢ alarm pomimo »e nie bedzie ani wªamania, ani trzesienia
ziemi:
P(J ∧ M ∧ A ∧ ¬B ∧ ¬E)
= P(J |A)P(M |A)P(A|¬B ∧ ¬E)P(¬B)P(¬E)
= 0.90 × 0.70 × 0.001 × 0.999 × 0.998 = 0.00062
1

Budowanie sieci przekona«
•
Sie¢ przekona« jest zbudowana poprawnie, je±li ka»dy wezeª
jest warunkowo niezale»ny od swoich poprzedników w upo-
rzadkowaniu wezªów
•
Rodzicami wezªa X
i
powinny by¢ wszystkie takie wezªy, które
bezpo±rednio wpªywaja na ten wezeª:
P(X
i
|X
i−1
, . . . , X
1
) = P(X
i
|P arents(X
i
))
(1)
przy zaªo»eniu, »e P arents(X
i
)
⊆ {X
i−1
, . . . , X
1
}
2

Ogólna procedura
•
Wybierz zbiór relewantnych zmiennych {X
i
}
opisujacych dziedzine
•
Wybierz uporzadkowanie zmiennych {X
i
}
•
Dopóki pozostaja jeszcze zmienne w {X
i
}
:
wybierz zmienna X
i
i dodaj dla niej wezeª do sieci
ustal minimalny zbiór zmiennych P arents(X
i
)
warunkowo
niezale»nych
okre±l tablice prawdopodobie«stw warunkowych dla tego
wezªa
3

Wnioskowanie w sieciach przekona«
Zadaniem systemu wnioskowania probabilistycznego jest oblicze-
nie rozkªadu prawdopodobie«stwa a posteriori dla zbioru zmien-
nych zapytania (query variables), gdy dane sa dokªadne warto±ci
zmiennych-dowodów (evidence variables)
4

Rodzaje wnioskowania w sieciach przekona«
(1)
•
Wnioskowanie diagnostyczne (od efektów do przyczyn)
Wiemy »e JohnCalls
wnioskujemy P(Burglary|JohnCalls) = 0.016
•
Wnioskowanie przyczynowe (od przyczyn do efektów)
Wiemy, »e Burglary
wnioskujemy P(JohnCalls|Burglary) = 0.86,
P(M aryCalls|Burglary) = 0.67
5

Rodzaje wnioskowania w sieciach przekona«
(2)
•
Wnioskowanie miedzyprzyczynowe (pomiedzy przyczynami
wspólnego skutku)
je±li wiemy, »e Alarm, to P(Burglary|Alarm) = 0.376
gdy wiemy dodatkowo, »e Earthquake, to
P(Burglary|Alarm ∧ Earthquake) = 0.003
6

Rodzaje wnioskowania w sieciach przekona«
(3)
•
Wnioskowanie mieszane (ªaczy dwa lub wiecej powy»szych
rodzajów wnioskowa«):
JohnCalls = T rue (efekt) oraz Eartquake = F alse (przy-
czyna) daje:
P(Alarm|J ohnCalls ∧ ¬Eartquake) = 0.03
[jednoczesne zastosowanie wnioskowania diagnostycznego
i przyczynowego]
P(Burglary|J ohnCalls ∧ ¬Eartquake) = 0.0017
[jednoczesne zastosowanie wnioskowania diagnostycznego
i miedzyprzyczynowego]
7

Zastosowanie sieci przekona«
Podstawowe: Obliczanie warto±ci miary przekonania (ang. be-
lief ) dotyczacego zmiennych zapytania, gdy sa okre±lone warto±ci
dowodów
Inne: • Podejmowanie decyzji opartych na prawdopodobie«st-
wach reprezentowanych w sieci i warto±ciach u»yteczno±ci
dla agenta
•
Decydowanie jakie dodatkowe dowody zgromadzi¢, by pozyska¢
u»yteczna informacje
•
Analiza wra»liwo±ci w celu okre±lenia które atrybuty maja
najwiekszy wpªyw na prawdopodobie«stwo wyniku
8

Wnioskowanie w wielokrotnie poªaczonych
sieciach przekona«
•
Metody grupowania
transformacje sieci w probabilistycznie równowa»ne polidrzewo
•
Metody warunkowania
transformacja poprzez konkretyzacje zmiennych poprzez pod-
stawienia, a nastepnie poprzez analize polidrzew dla ka»dego
mo»liwego podstawienia
•
Symulacja stochastyczna
9
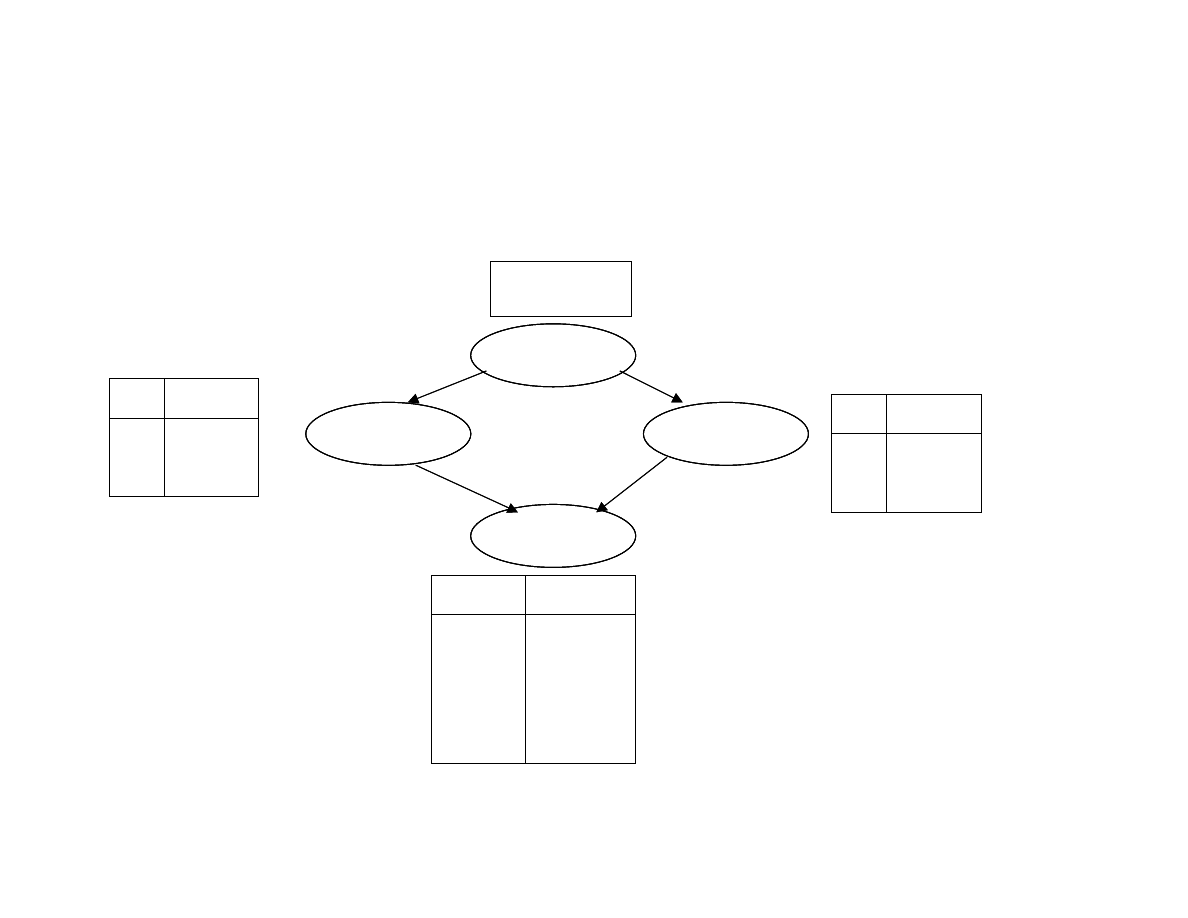
Przykªad sie¢ wielokrotnie poªaczona (1)
Cloudy
Sprinkler
Rain
Wet grass
Cloudy
Cloudy
Sprinkler
Sprinkler
Rain
Rain
Wet grass
Wet grass
P(C)=0.5
P(C)=0.5
C
T
F
P(S)
0.10
0.50
C
T
F
P(S)
0.10
0.50
C
T
F
P(S)
0.10
0.50
C
T
F
P(R)
0.80
0.20
C
T
F
P(R)
0.80
0.20
C
T
F
P(R)
0.80
0.20
S
T
T
F
F
R
T
F
T
F
P(W)
0.99
0.90
0.90
0.00
S
T
T
F
F
R
T
F
T
F
P(W)
0.99
0.90
0.90
0.00
S
T
T
F
F
R
T
F
T
F
S
T
T
F
F
R
T
F
T
F
P(W)
0.99
0.90
0.90
0.00
10
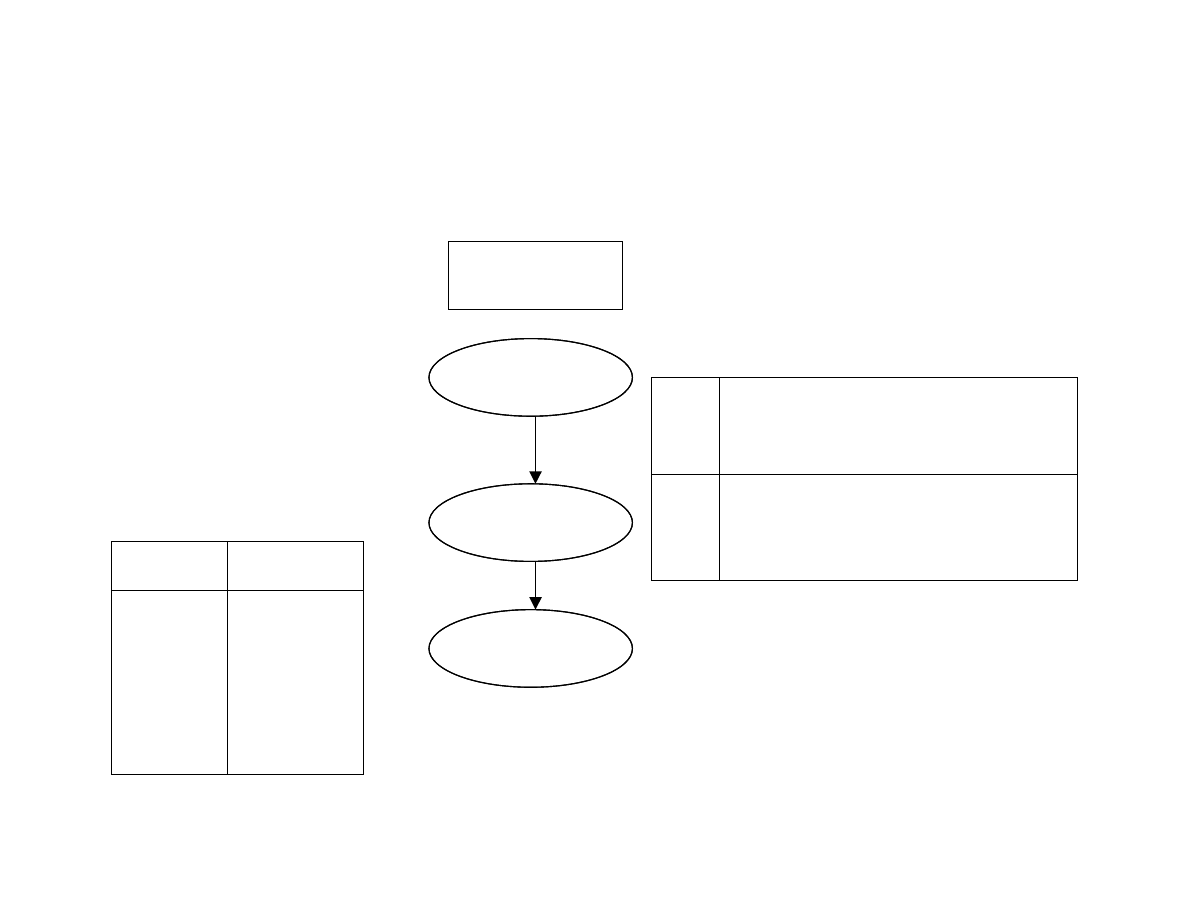
Przykªad sie¢ wielokrotnie poªaczona (2)
Cloudy
Cloudy
Spr+Rain
Spr+Rain
Wet grass
Wet grass
P(C)=0.5
P(C)=0.5
S +
T
T
F
F
R
T
F
T
F
P(W)
0.99
0.90
0.90
0.00
S +
T
T
F
F
R
T
F
T
F
P(W)
0.99
0.90
0.90
0.00
S +
T
T
F
F
R
T
F
T
F
S +
T
T
F
F
R
T
F
T
F
P(W)
0.99
0.90
0.90
0.00
C
T
F
P(S+R=x)
TT
.08
.40
TF
.02
.10
FT
.72
.40
FF
.18
.10
C
T
F
P(S+R=x)
TT
.08
.40
TF
.02
.10
FT
.72
.40
FF
.18
.10
C
T
F
P(S+R=x)
TT
.08
.40
TF
.02
.10
FT
.72
.40
FF
.18
.10
11
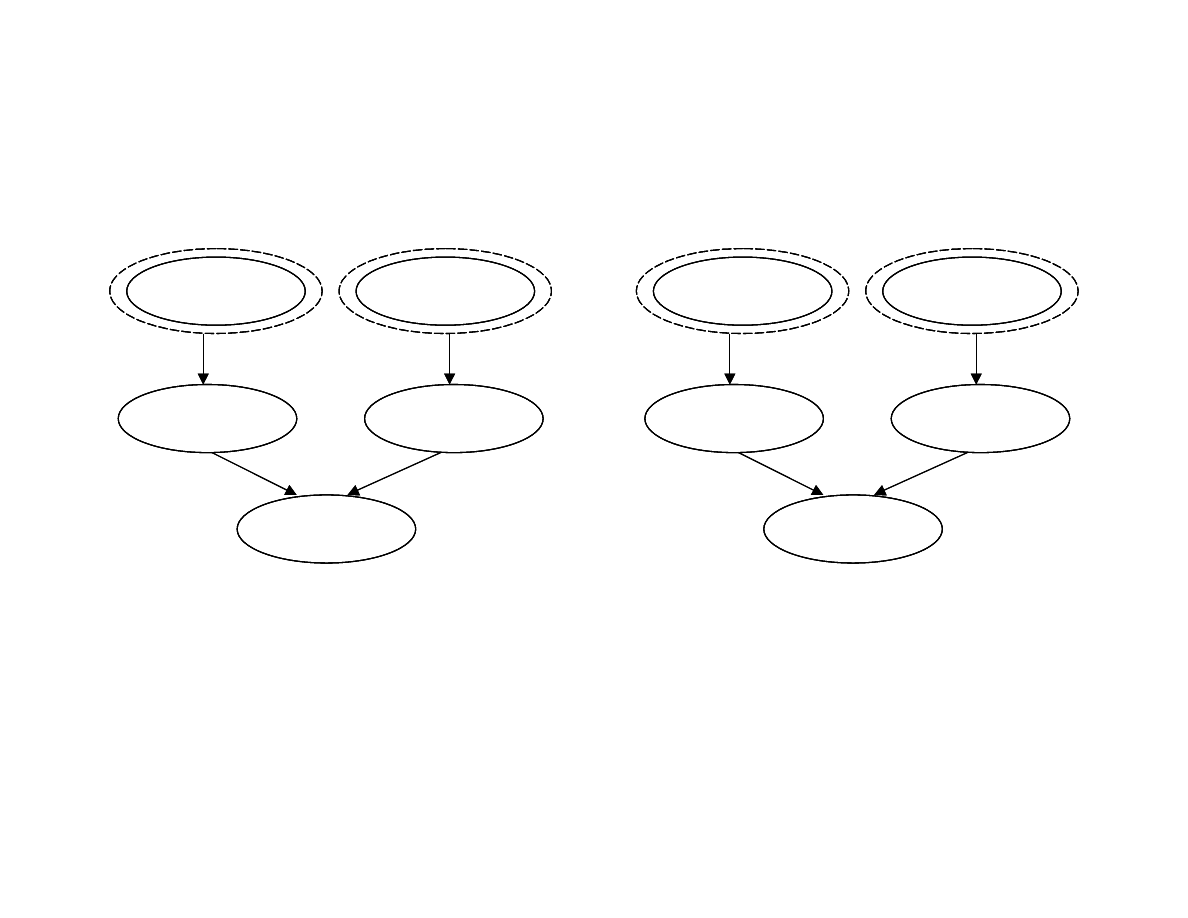
Przykªad sie¢ wielokrotnie poªaczona (2)
Sprinkler
Rain
Wet grass
+Cloudy
+Cloudy
Sprinkler
Sprinkler
Rain
Rain
Wet grass
Wet grass
+Cloudy
+Cloudy
+Cloudy
+Cloudy
Sprinkler
Rain
Wet grass
-Cloudy
-Cloudy
Sprinkler
Sprinkler
Rain
Rain
Wet grass
Wet grass
-Cloudy
-Cloudy
-Cloudy
-Cloudy
Transformacja polidrzewa na kilka prostszych polidrzew.
P(X|E)
jest obliczane jako ±rednia wa»ona warto±ci obliczonych
dla ka»dego polidrzewa
12

Metoda symulacji stochastycznej
•
Ka»da runde symulacji rozpoczyna losowy wybór warto±ci
dla ka»dego wezªa poczatkowego sieci (z uwzglednieniem
prawdopodobie«stw a priori)
•
Warto±ci w wezªach po±rednich przyjmuje sie losowo z uwzgled-
nieniem prawdopodobie«stw warunkowych
•
Po wystarczajacej liczbie iteracji estymuje sie
P(X|E) ≈ N(X ∧ E)/N(E)
gdzie N liczby uzyskanych wyników
13

Inne podej±cia do rozumowania niepewnego
•
Rozumowanie domy±lne (default reasoning)
•
Podej±cie bazujace na reguªach
•
Teoria Dempstera-Schafera
•
Zbiory rozmyte i logika rozmyta
14

Rozumowanie domy±lne (przykªad)
•
Widze samochód parkujacy na ulicy. Chocia» widze jedynie
jego trzy koªa, przyjmuje do wiadomo±ci, »e ma cztery koªa.
•
Ten wniosek przyjmuje domy±lnie, ze wzgledu na brak in-
nych dowodów wskazujacych na to, »e ten samochód ma
inna liczbe kóª ni» cztery.
•
Takie rozumowanie nie jest monotoniczne.
15
Metody bazujace na reguªach
•
Systemy bazujace na reguªach sa monotoniczne.
•
Przykªad: system MYCIN, w którym zastosowano stopie«
pewno±ci (certainty factor).
16

Reprezentowanie ignorancji
•
Stopie« przekonania to prawdopodobie«stwo zdarzenia, »e
dowody wspieraja stwierdzenie
•
Miara jest funkcja przekonania (belief ) Bel(X)
•
Dla poszczególnych zdarze« deniowane sa przedziaªy mini-
malnego i maksymalnego przekonania o sªuszno±ci danego
stwierdzenia
•
Szeroko±¢ przedziaªu odpowiada naszej niewiedzy; gdy jest
zbyt szeroki, nale»y zebra¢ dalsze dowody
17
Zbiory rozmyte i logika rozmyta (1)
•
Rodzaj rozumowania niepewnego
•
Dla elementu deniuje sie dodatkowo funkcje przynale»no±ci
do danego zbioru
•
Mo»liwa jest przynale»no±¢ cze±ciowa
0
1
m(A)
100
140
180
220
260
18

Zbiory rozmyte i logika rozmyta (2)
•
W logice rozmytej rozwa»a sie rozmyty stopie« prawdzi-
wo±ci
T(A) =
stopie« prawdziwo±ci zdarzenia A
•
Reguªy obliczania T ( ) dla zda« zªo»onych:
T(A ∧ B) = min{T(A), T(B)}
T(A ∨ B) = max{T(A), T(B)}
T(
¬A) = 1 − T(A)
•
Uwaga!! T(A ∨ ¬A) 6= T(T rue)!!
19

Probabilistyczne systemy rozumowania
podsumowanie (1)
•
Warunkowa niezale»no±¢ umo»liwia strukturalizacje informa-
cji o niepewnej dziedzinie
•
Sieci przekona« sa naturalnym ±rodkiem reprezentacji infor-
macji o warunkowej niezale»no±ci
•
Sie¢ przekona« reprezentuje ªaczny rozkªad prawdopodobie«-
stwa dla danej dziedziny
20
Probabilistyczne systemy rozumowania
podsumowanie (2)
•
Rozumowanie w sieci przekona« polega na obliczeniu rozkªadu
prawdopodobie«stwa dla zbioru zmiennych zapytania, gdy
dany jest zbiór dowodów
•
Sieci przekona« sa najbardziej uniwersalne ze wzgl. na mo»li-
wo±¢ stosowania ró»nych typów wnioskowania (diagnosty-
czne, przyczynowe, miedzyprzyczynowe, mieszane)
21

Probabilistyczne systemy rozumowania
podsumowanie (3)
•
Stopie« zªo»ono±ci rozumowania w sieci przekona« zale»y od
struktury sieci (najªatwiej dla polidrzew)
•
Dla bardziej zªo»onych sieci istnieje wiele ró»nych metod
rozumowania
•
Do wnioskowania mo»na stosowa¢ stochastyczna symulacje
(wymaga mniej oblicze«)
•
Znanych jest wiele innych metod wnioskowania z uwzglednie-
niem niepewno±ci
22

Uczenie (si¦) na podstawie ob-
serwacji
23

Gªówna idea
•
Percepcje s¡ wykorzystywane nie tylko do wyboru odpowied-
niej akcji, lecz tak»e do powi¦kszania zdolno±ci systemu
wnioskowania (agenta) do dziaªania w przyszªo±ci (ucze-
nia si¦)
•
Uczenie si¦ zachodzi jako wynik interakcji pomi¦dzy sys-
temem wnioskowania (agentem) i otoczeniem
•
Jest wiele form uczenia, od zapami¦tywania do tworzenia
zªo»onych teorii
24
Ogólny model systemu wnioskowania
(agenta) ucz¡cego si¦ (1)
25

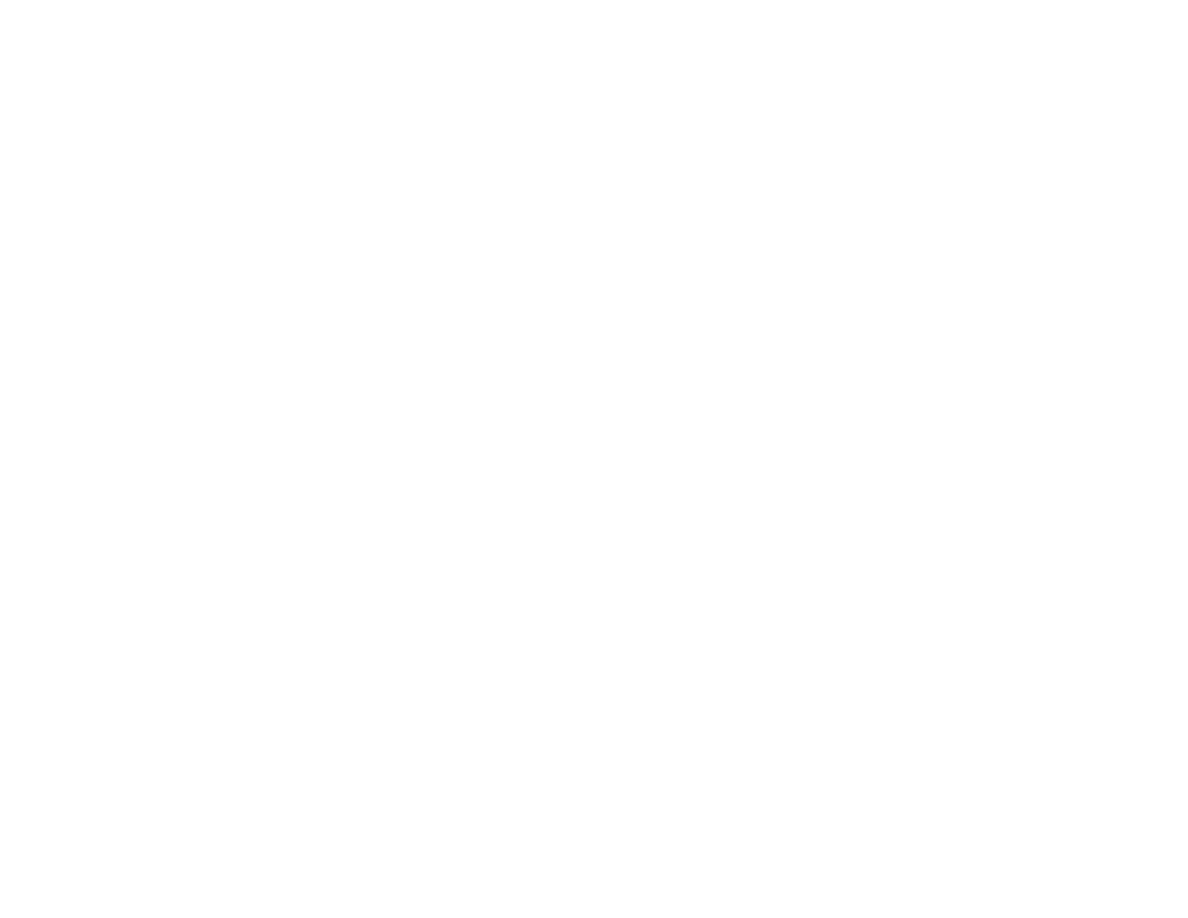
Ogólny model systemu wnioskowania
(agenta) ucz¡cego si¦ (2)
•
Element ucz¡cy si¦ - odpowiada za dokonywanie ulepsze«
•
Element dziaªaj¡cy - odpowiada za wybór zewn¦trznych
dziaªa«
•
Krytyka - dostarcza elementowi ucz¡cemu si¦ informacji o
tym, jak dobrze dziaªa agent
•
Generator problemów - sugeruje akcje, które b¦d¡ prowadzi¢
do nowych i informatywnych do±wiadcze«
26

Ogólny model systemu wnioskowania
(agenta) ucz¡cego si¦ (3)
•
Dost¦pne sprz¦»enia zwrotne:
uczenie nadzorowane (agent zna zarówno percepcje, jak
i wynik ich klasykacji)
uczenie ze wzmocnieniem (agent jest nagradzany lub
karany, w zale»no±ci od wyniku akcji; klasykacja nie jest
agentowi znana)
uczenie nienadzorowane (klasykacja nieznana)
•
Rola wiedzy podstawowej - uczenie zwi¦ksza nieznacznie
wiedz¦ posiadan¡ przez agenta
27

Indukcja drzew decyzyjnych
•
Jeden z najprostszych algorytmów uczenia maszynowego
•
atwa do wdro»enia
28

Cechy drzew decyzyjnych
•
Obiekty s¡ opisane przez zbiory ich cech
•
Drzewo zwraca klasykacj¦ (decyzj¦) TAK/NIE (mog¡ by¢
przypadki wieloklasowe - bardziej ogólne)
•
Drzewo reprezentuje funkcj¦ Boolowsk¡
29

Budowa drzewa decyzyjnego
•
Ka»dy wewn¦trzny w¦zeª odpowiada testowi dotycz¡cemu
warto±ci jakiego± atrybutu
•
Ka»dej kraw¦dzi wychodz¡cej z danego w¦zªa przyporz¡d-
kowana jest jedna warto±¢ atrybutu w¦zªowego
•
Li±ciom przyporz¡dkowane s¡ warto±ci Boolowskie, zwracane
je±li osi¡gni¦to dany li±¢
30

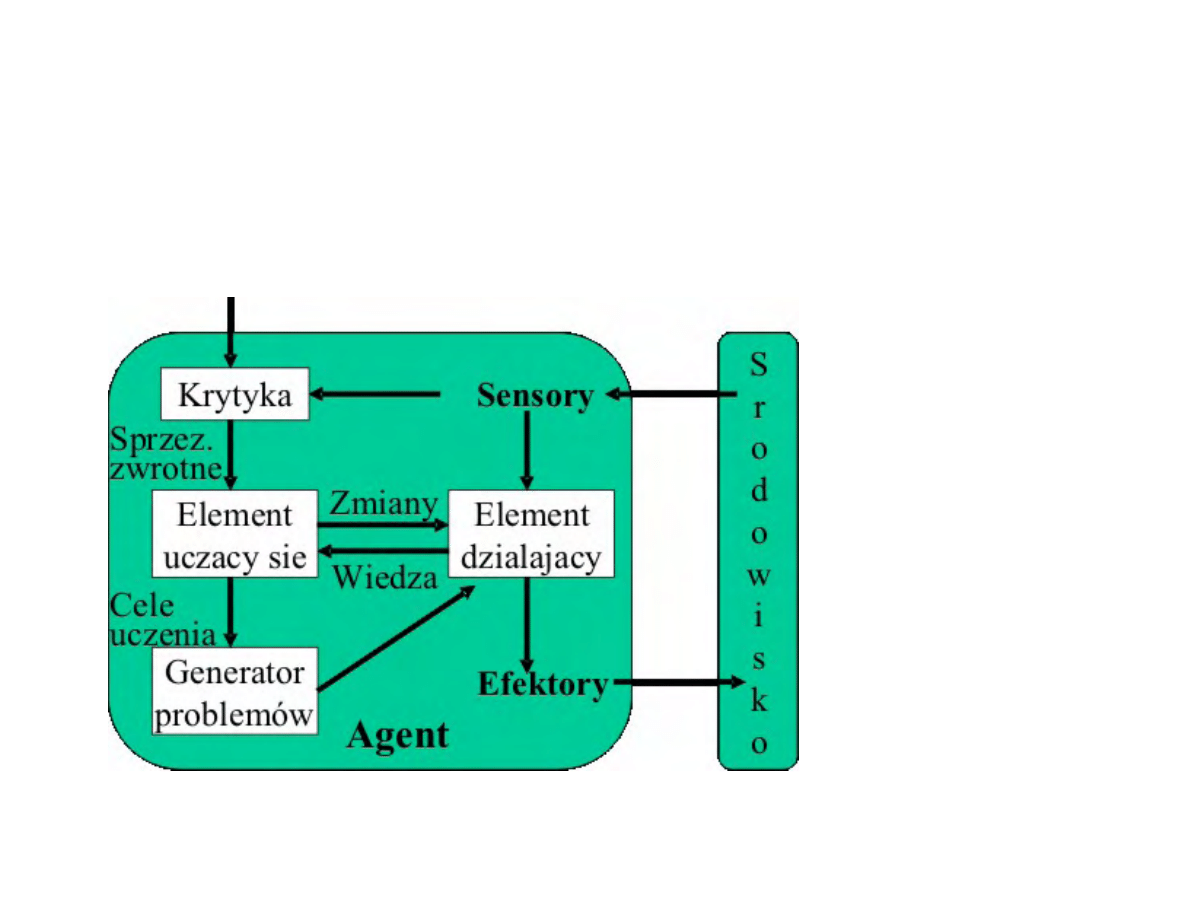
Przykªad: czy czeka¢ na stolik?
•
Alternate: w pobli»u jest
inna restauracja?
•
Bar: czy w restauracji jest
bar gdzie mo»na poczeka¢?
•
Fri/Sat: Pi¡tek/Sobota
•
Hungry: jeste± gªodny?
•
Patrons: ile jest ludzi w
restauracji?
•
Price: zakres cen
•
Raining: czy pada?
•
Reservation: czy zarezer-
wowali±my wcze±niej?
•
Type: rodzaj restauracji -
chi«ska, wªoska, Burger.
•
WaitEstimate: szacowany
czas oczekiwania w min.
31
Czy czeka¢ na stolik?
32

Indukcja drzew decyzyjnych ze zbioru przykªadów
•
Przykªad opisywany jest przez warto±ci atrybutów (warunku)
oraz przez warto±¢ atrybutu decyzyjnego
•
Przykªady tworz¡ zbiór trenuj¡cy
•
Brzytwa Ockhama:
Najbardziej prawdopodobna jest najprostsza spo±ród hipotez
zgodnych ze wszystkimi obserwacjami
33
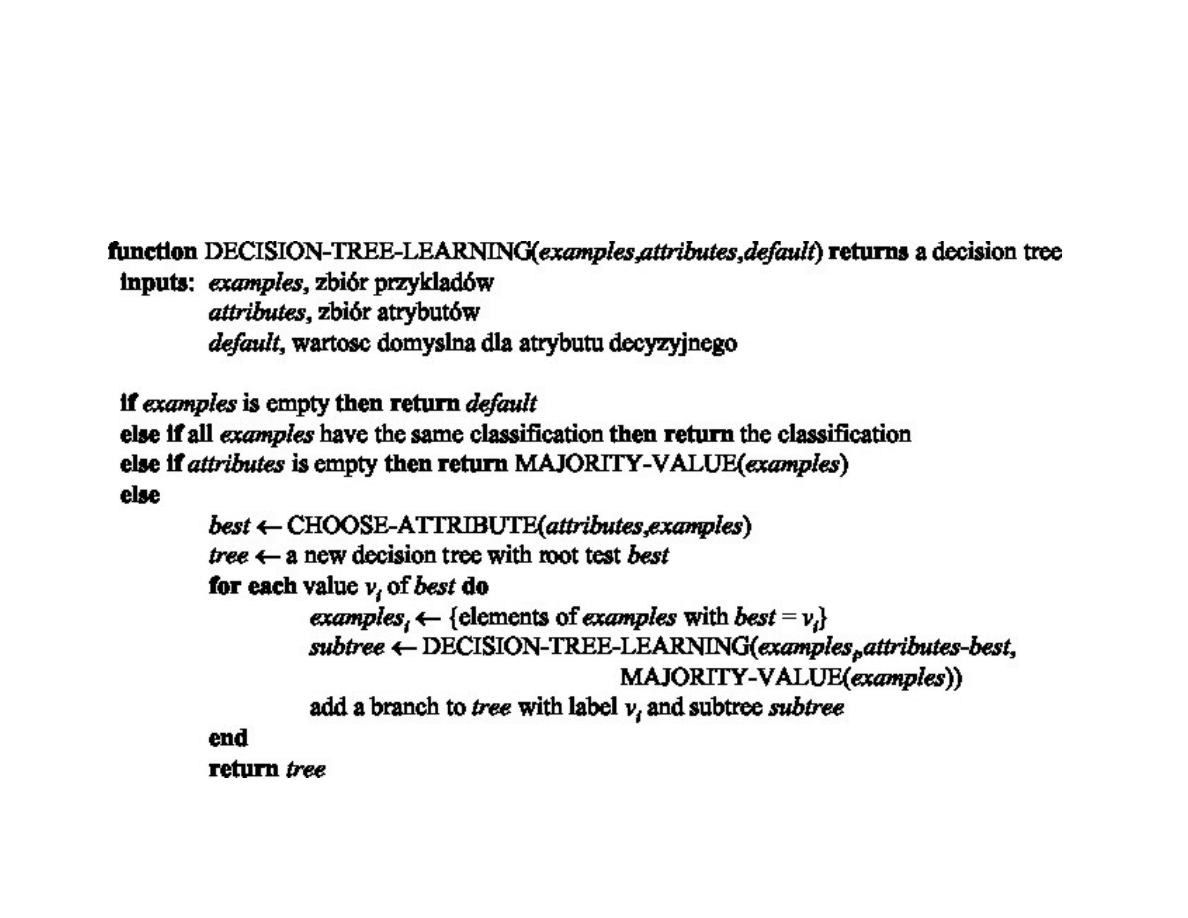
Algorytm indukcji drzew decyzyjnych
34
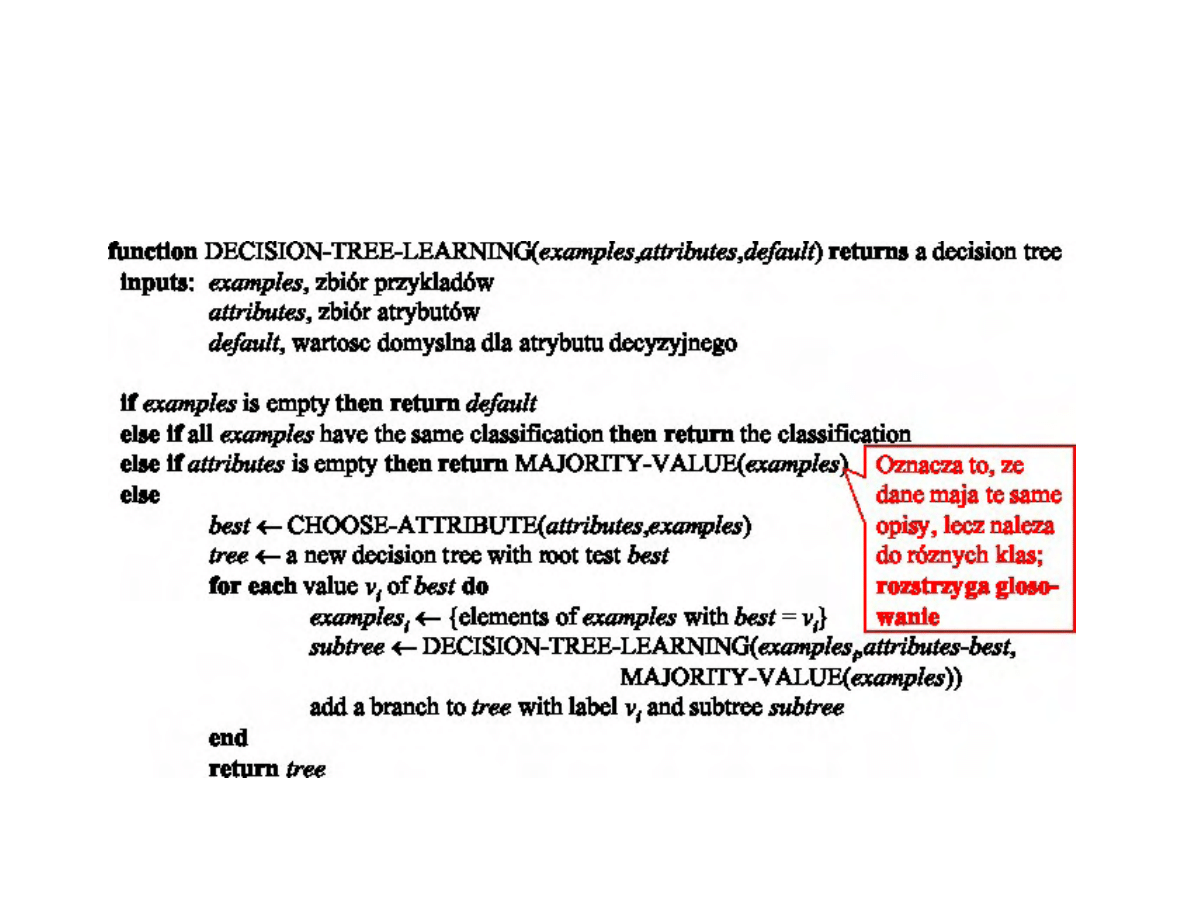
Algorytm indukcji drzew decyzyjnych
35

Uwagi dotycz¡ce indukcji drzew
•
Podstawowy problem - wybór
•
Indukcja niezupeªna (nie mamy wszystkich mo»liwych przy-
kªadów)
•
Programy realizuj¡ce uczenie maszynowe dziaªaj¡ bardzo szy-
bko i efektywnie
•
Drzewa decyzyjne mog¡ by¢ bardzo rozbudowane - cz¦sto si¦
je przycina kosztem nieco gorszej sprawno±ci klasykacji
36

Ocena sprawno±ci algorytmu uczenia (1)
•
Zgromad¹ dostatecznie liczny zbiór przykªadów
•
Podziel go na rozª¡czne zbiory: trenuj¡cy i testowy
•
Stosuj¡c zbiór trenuj¡cy jako przykªady, uzyskaj indukcyjnie
hipotez¦ H
•
Stosuj¡c przykªady testowe, okre±l jaka ich cz¦±¢ jest po-
prawnie klasykowana przez H
•
Powtarzaj te kroki dla zbiorów trenuj¡cych ró»nych wiel-
ko±ci, losowo wybieranych
37

Ocena sprawno±ci algorytmu uczenia (2)
•
Ilo±¢ informacji [bity] zawartej w poprawnej odpowiedzi, gdy zbiór trenu-
j¡cy zawiera p przykªadów pozytywnych i n negatywnych:
I(
p
p + n
,
n
p + n
) =
−
p
p + n
log
2
p
p + n
−
n
p + n
log
2
n
p + n
(2)
•
Ilo±¢ informacji dost¦pna po testowaniu atrybutu A:
P ozostalo(A) =
ν
X
i=1
p
i
+ n
i
p + n
I(
p
i
p
i
+ n
i
,
n
i
p
i
+ n
i
)
(3)
Atrybut A dzieli zbiór E na podzbiory E
1
, . . . , E
ν
; p
i
, n
i
to liczby przykªadów
pozytywnych i negatywnych w tym podzbiorze
•
Przyrost ilo±ci informacji:
Gain(A) = I(
p
p + n
,
n
p + n
)
− P ozostalo(A)
(4)
38

Zwi¦kszenie mo»liwo±ci zastosowania drzew
decyzyjnych
•
Brakuj¡ce dane (nie zapisane; zbyt kosztowne ich uzyskanie)
•
Atrybuty wielowarto±ciowe
•
Atrybuty o warto±ciach ci¡gªych (rzeczywistych) - wyma-
gana dyskretyzacja
39

Niektóre problemy
•
Bª¦dne dane (np. sprzeczne przykªady - takie same warto±¢
atrybutów warunku, ró»ne warto±ci atrybutu decyzyjnego)
drzewo klasykuje bª¦dnie
•
Nadmierne dopasowanie zbyt szczegóªowy klasykator, du»o
bª¦dów dla nowych przykªadów
•
Rada - PRZYCINANIE DRZEWA
40

Podstawowe pytanie
Sk¡d wiadomo, »e algorytm uczenia pozwoliª utworzy¢ teori¦,
która b¦dzie poprawna?
41

Odpowied¹ intuicyjna
•
Ka»da hipoteza, która jest powa»nie bª¦dna, zostanie na
pewno znaleziona z wysokim prawdopodobie«stwem jedynie
dla maªej liczby przykªadów, poniewa» to prowadziªoby do
bª¦dnych przewidywa«
•
Wniosek:
Jest nieprawdopodobne, »eby hipoteza zgodna z wystar-
czaj¡co licznym zbiorem trenuj¡cym, byªa powa»nie bª¦d-
na
•
Uczenie PAC (Probably Approximately Correct)
42

Ile potrzeba przykªadów (1)?
• X
zbiór wszystkich mo»liwych przykªadów
• D
rozkªad prawdopodobie«stwa, z którego losuje si¦ przykªady
• H
zbiór mo»liwych hipotez
• f ∈ H
prawdziwa funkcja, któr¡ staramy si¦ przybli»y¢ za
pomoc¡ hipotezy h ∈ H
• m
- liczba przykªadów w zbiorze trenuj¡cym
43

Ile potrzeba przykªadów (2)?
•
Bª¡d (h ∈ H ró»ne od aproksymowanej funkcji f):
error(h) = P{h(x) 6= f (x) | x wylosowane z D}
(5)
•
Hipoteza jest w przybli»eniu poprawna, je±li dla maªej liczby
ε
:
error(h) ≤ ε
(6)
•
Gdy δ dopuszczalne prawdopodobie«stwo bª¦dnej hipotezy:
m ≥
1
ε
ln
1
δ
+ ln
|H|
(7)
44

Podsumowanie (1)
•
Zdolno±¢ uczenia si¦ systemu wnioskowania (agenta) jest is-
totna ze wzgl¦du na dziaªanie w nieznanym ±rodowisku
•
W systemie wnioskowania (agencie) ucz¡cym si¦ mo»na wyró»ni¢:
element dziaªaj¡cy, odpowiedzialny za wybór akcji
element ucz¡cy (si¦), odpowiedzialny za modykowanie
elementu dziaªaj¡cego
•
Mo»liwe s¡ ró»ne formy uczenia, ze wzgl¦du na: element
dziaªaj¡cy, sprz¦»enia zwrotne oraz dost¦pn¡ wiedz¦
45

Podsumowanie (2)
•
Uczenie si¦ jakiegokolwiek skªadnika elementu dziaªaj¡cego
mo»e by¢ interpretowane jako uczenie si¦ aproksymacji
funkcji
•
Uczenie si¦ aproksymacji funkcji na podstawie przykªadów
nazywa si¦ uczeniem indukcyjnym
•
Drzewa decyzyjne s¡ skutecznym ±rodkiem uczenia si¦ zde-
terminowanych funkcji Boole'a
46

Podsumowanie (3)
•
Brzytwa Ockhama sugeruje wybór najprostszej hipotezy pa-
suj¡cej do obserwowanych przykªadów
•
Okre±lenie najwi¦kszego przyrostu informacji umo»liwia
znalezienie prostych drzew decyzyjnych
•
Osi¡gi algorytmu uczenia indukcyjnego okre±la si¦ za pomoc¡
ª¡cznego bª¦du klasykacji
47
Wyszukiwarka
Podobne podstrony:
MSI 2006 w4
MSI 2006 w3
MSI 2006 w2
MSI 2006 w1
MSI 2006 w7
MSI AiR w4 2004
MSI 2006 w3
MSI 2006 w3
MSI 2006 w2
MSI w6 2006 cz1
mikroskopia w4 2006 w1
systemy podatkowe w4 4 04 2006 Y34OFF636N43SNAFYBXLSOPQZBMYP4IZL4455UI
MSI w4 konspekt 2010 id 309792 Nieznany
finanse międzynarodowe w4 (14 03 2006) XEHYIKNNQ5XZWBJV4ZLKZZL6PEB2B6F7F62IH7I
rachunkowo 9c e6+mi eadzynarodowa+ w4 + 2805 04 2006 29 NJJDTAD2KPGRX2VLHWHIYVRLNIDPEWVKE63QOOQ
W4 Proces wytwórczy oprogramowania
więcej podobnych podstron