MSI-w6/1
Metody sztucznej inteligencji
Politechnika Śląska
Katedra Podstaw Konstrukcji Maszyn
Rok akademicki 2005/2006
Wykład 6
Elementy robotyki
Prof. dr hab. Wojciech Moczulski
Materiały dydaktyczne (na prawach rękopisu)
dla studentów Wydziału Mechanicznego Technologicznego
Wszystkie ilustracje pochodzą z S. Russel, P. Norvig, Artificial
Intelligence - A modern approach, Prentice Hall, 1995

MSI-w6/2
Pojęcie robota
• Robot to aktywny i sztuczny agent, którego
środowiskiem jest realnie istniejący świat
• Jeśli przyjąć taką definicję, nie jest robotem:
– Kawał skały
– Zwierzę
– Program komputerowy (
→
softbot
)
• Szczególnym przedmiotem zainteresowania będą
roboty autonomiczne
, podejmujące
samodzielnie
decyzje
, bazując na
sprzężeniu z otoczeniem
poprzez
posiadane sensory

MSI-w6/3
Rzeczywisty świat robota (1)
• Niedostępny
– Czujniki niedoskonałe
– Robot może zwykle postrzegać bodźce ze swojego
bliskiego sąsiedztwa
• Niedeterministyczny
– Koła mogą się ślizgać po podłożu
– Akumulatory mogą się rozładować
– Elementy mogą się uszkodzić
– Nie wiadomo, czy dana akcja zakończy się sukcesem

MSI-w6/4
Rzeczywisty świat robota (2)
• Nieepizodyczny
– Wyniki akcji zmieniają się w czasie
– Robot musi rozwiązywać sekwencyjne problemy
decyzyjne i uczyć się
• Dynamiczny
– Co jest lepsze: długo się zastanawiać, czy działać
natychmiast
• Ciągły
– Nieskończenie wiele stanów
– Wymaga modyfikacji algorytmów przeszukiwania i/lub
planowania

MSI-w6/5
Zakres wykładu
• Zadania
, do których realizacji roboty się
nadają
• Niektóre specjalne
układy wykonawcze
(efektory) i
sensory
• Architektura robota
jako autonomicznego
agenta
• Wybór akcji
w ciągłej przestrzeni stanów

MSI-w6/6
Zadania wykonywane przez
roboty (1)
• Procesy wytwórcze
– Tradycyjna dziedzina zastosowania
– W 1985 r 180 000 robotów (150 000 w J, USA, F)
– Przemysł samochodowy, mikroelektronika, ...
– Przemieszczają obiekty o masie do 1 [t] z dokładnością do
2.5 [mm] w przestrzeni roboczej o R=10 [m] (1995 r.)
– Bardzo ograniczone możliwości odczuwania i adaptacji
(proste maszyny najlepiej realizują proste zadania)
– Roboty autonomiczne wciąż walczą o akceptację

MSI-w6/7
Zadania wykonywane przez
roboty (2)
• Gospodarka materiałowa
– Magazynowanie, transport i dostarczanie
– Różne wielkości i masy
– AGV=autonomous guided vehicle
– Wyzwanie przyszłości: obchodzenie się z
żywnością (różne wielkości, kształty, tekstury, )
• Inne
- np. strzyżenie owiec w Australii (140
mln owiec!!)

MSI-w6/8
Zadania wykonywane przez
roboty (3)
• Zadania wymagające mobilności
– Kurierzy (szpitale, biura, poczta)
– Straż bezpieczeństwa
– AUV=autonomous underwater vehicle

MSI-w6/9
Zadania wykonywane przez
roboty (4)
• Niebezpieczne środowisko
– Księżyc, planety i przestrzeń międzyplanetarna
– Środowisko radioaktywne, naprawy w reaktorach
– Naprawy instalacji chemicznych, kotłów
parowych itp.
– Zwykle operowane przez człowieka
– Często posiadają pewną autonomię (zbyt długie
opóźnienia w odpowiedzi operatora - np. Mars)

MSI-w6/10
Zadania wykonywane przez
roboty (5)
• Zdalna obecność
– Robot przedłużeniem organów i zmysłów
człowieka (prace na dnie oceanu, rozbrajanie
bomb)
– Roboty militarne (samoloty, szpiedzy, ...)
• Zwiększenie możliwości człowieka
– Zastąpienie amputowanych organów
– Siatkówka, zmysł dotyku

MSI-w6/11
Najważniejsze podzespoły
• Robot ma:
– Sztywny
korpus
(body)
– Więzy
(links) [sztywne]
– Połączenia
(joints)
– Końcowe elementy wykonawcze
(end effectors)
stosowane do oddziaływania na środowisko

MSI-w6/12
Elementy wykonawcze
• Oddziałują na środowisko
pod kontrolą układu
sterowania robota
• Wyposażone w
siłowniki/serwomechanizmy
(jeden
dla każdego stopnia swobody) zamieniające
komendy programowe w fizyczny ruch
• Stosowane do:
– Zmiany pozycji robota (
lokomocja
)
– Przemieszczania innych obiektów w środowisku
(
manipulacja
)

MSI-w6/13
Lokomocja
• Roboty kroczące
• Roboty jeżdżące
MSI-w6/14
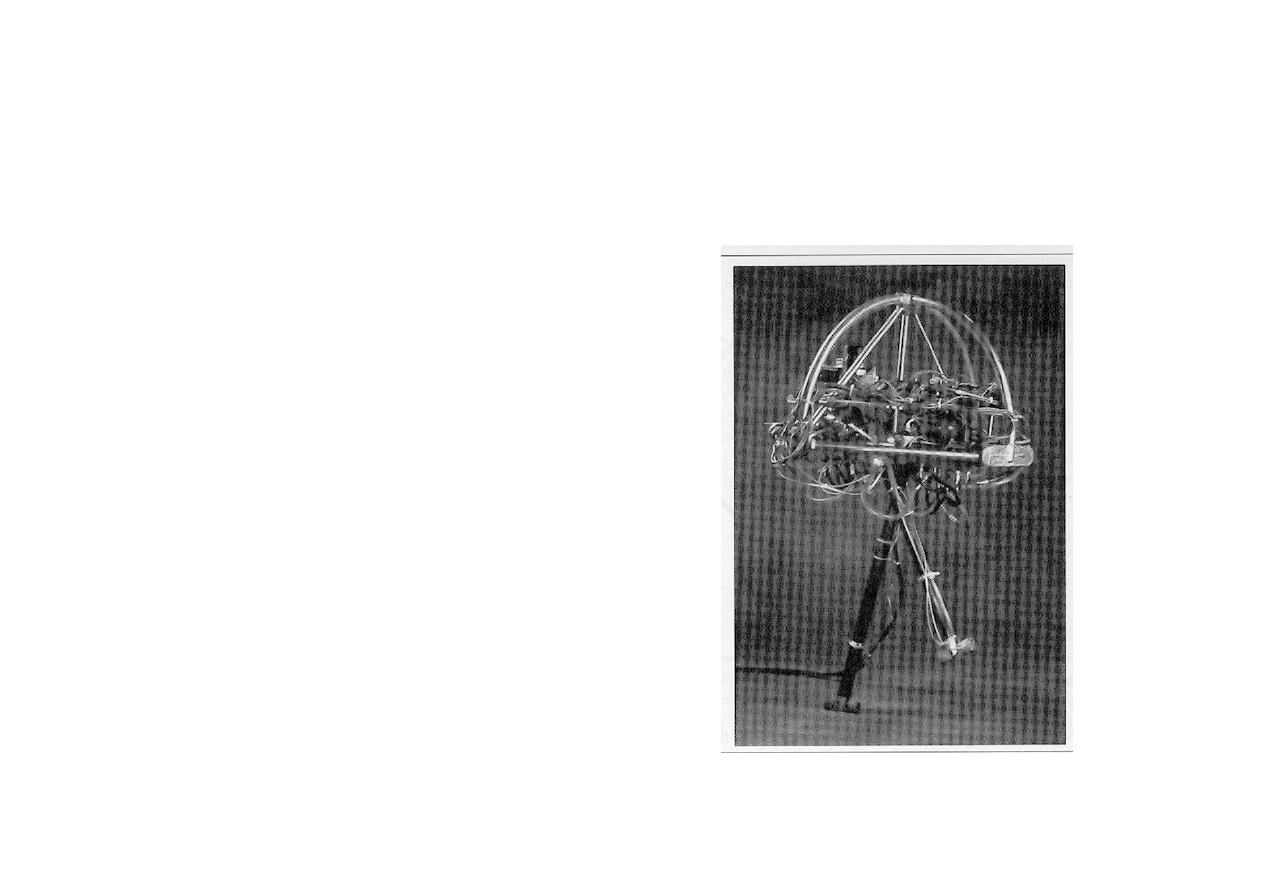
Lokomocja - roboty kroczące
• Stateczne statycznie:
• Można zatrzymać w
każdej chwili (nie
upadną)
• Bardzo wolne
przemieszczanie się
• Zużywają
nieefektywnie energię
• Stateczne dynamicznie
• Skaczące

MSI-w6/15
Lokomocja - roboty jeżdżące (1)
• Podwozie kołowe, gąsienicowe, ...
• Proste w budowie
• Bardziej efektywne niż nogi
• Podparcie statyczne
• Łatwiejsze do sterowania
MSI-w6/16
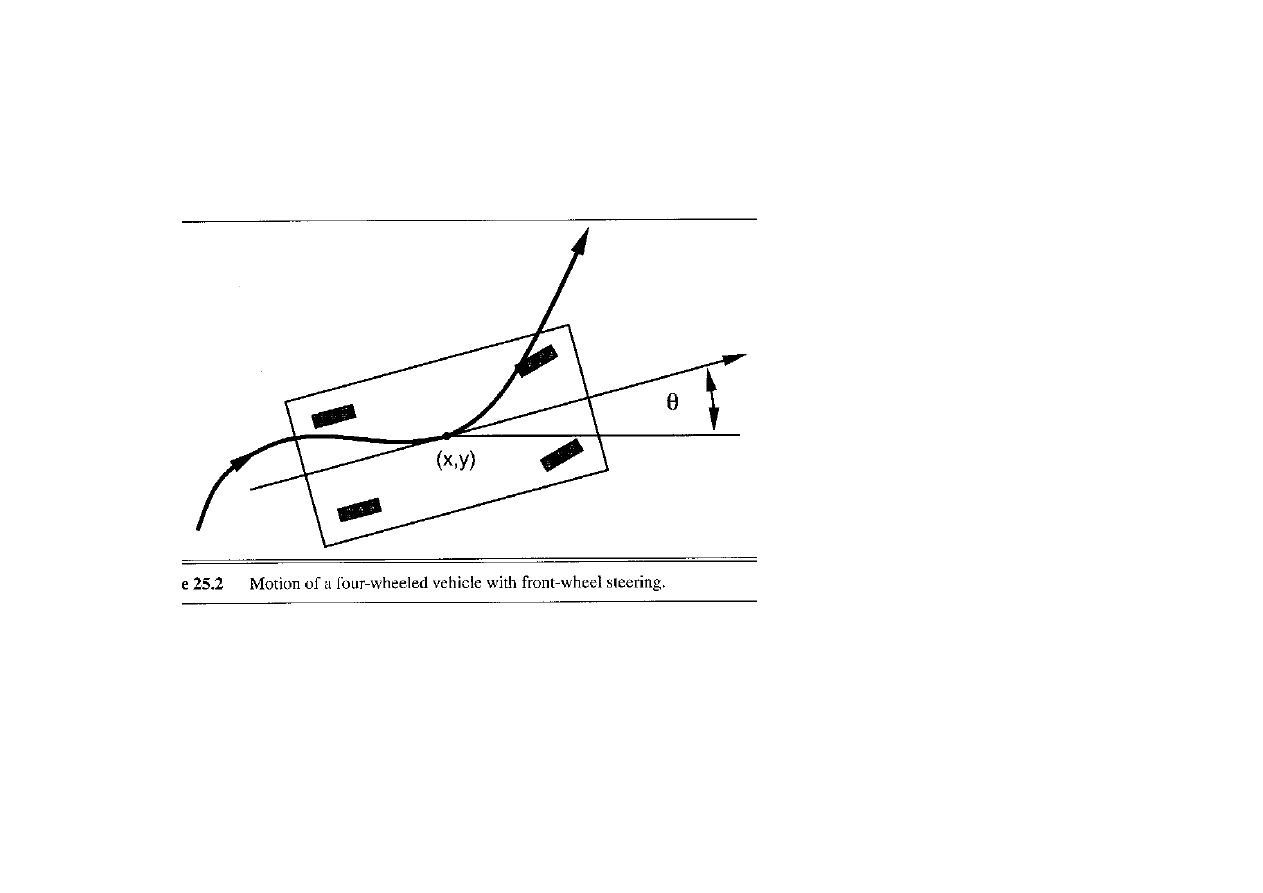
Lokomocja - roboty jeżdżące (2)
Robot na podwoziu 4-
kołowym ma 3 stopnie
swobody (pozycja x-y,
kierunek), lecz w małej
skali tylko 2!!

MSI-w6/17
Lokomocja - roboty jeżdżące (3)
• Roboty
holonomiczne (układ bez poślizgu)
– Liczba stopni swobody równa sterowalnej liczbie stopni
swobody
– Budowa możliwa, lecz nieopłacalna
• Roboty
nieholonomiczne (auto z przyczepą: 4 d.o.f.; 2
c.d.o.f. – bardzo trudno jest cofać takim zestawem)
– Mniej sterowalnych stopni swobody niż wszystkich stopni
swobody
– Im większa różnica w stopniach swobody, tym trudniej
sterować
– Dużo prostsze z punktu widzenia układu mechanicznego
MSI-w6/18
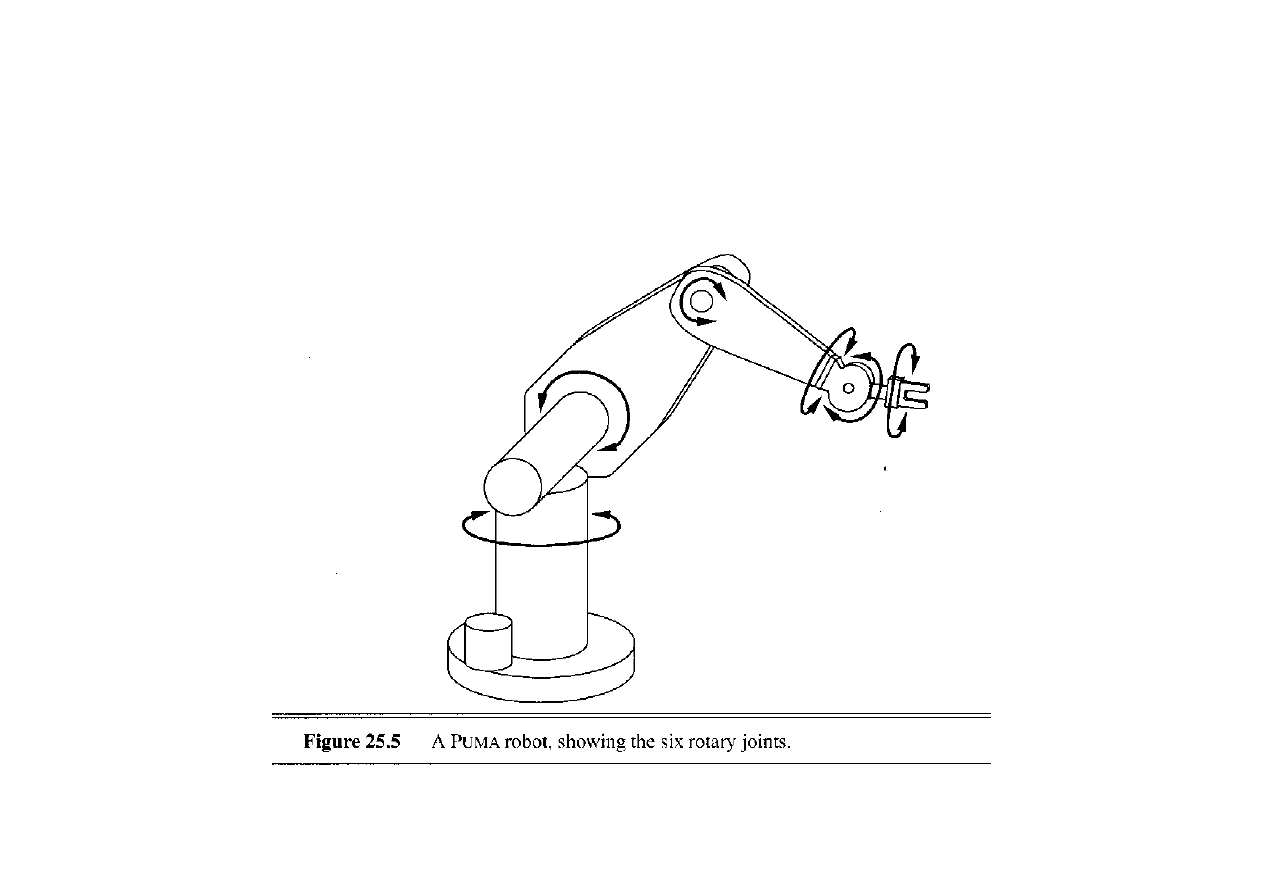
Manipulowanie (1)
• Realizowane przez
manipulatory
• Większość manipulatorów wykonuje
– albo
ruch obrotowy
(R)
– albo
ruch postępowy
(P)
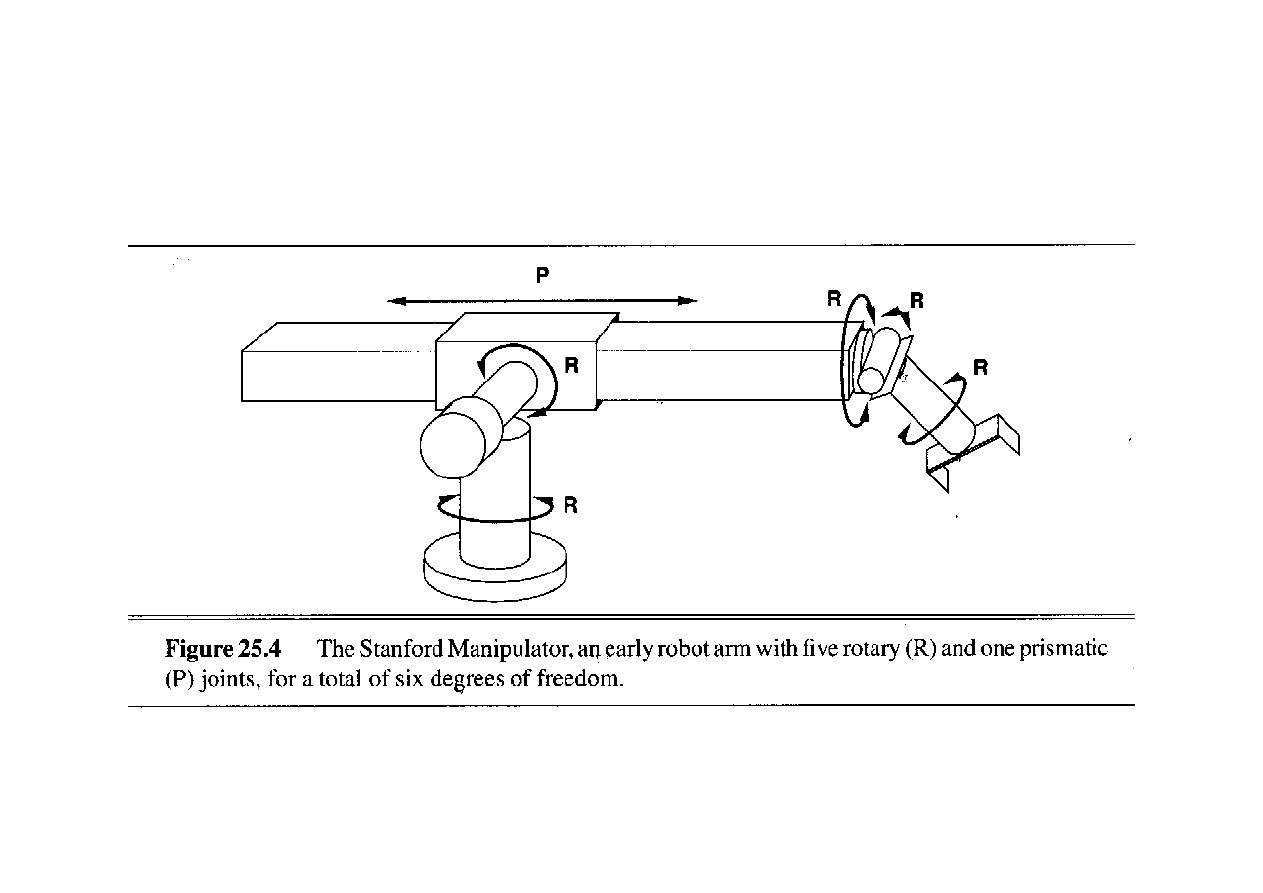
MSI-w6/19
Manipulowanie (2)
MSI-w6/20
Manipulowanie (3)
MSI-w6/21
Manipulowanie:
Końcowy mechanizm wykonawczy
• Oddziałuje
bezpośrednio na
obiekty otoczenia
• Narzędzia
:
– Śrubokręt
– Spawarka
– Pistolet malarski
– . . .
• Chwytaki

MSI-w6/22
Sensory: Identyfikacja stanu robota
• Do określania położenia więzów:
– Stosowane kodery (encoder)
– Dużo większa dokładność określania położenia
organów roboczych niż w przypadku człowieka
• Do określania zmiany położenia robota
mobilnego:
– Odometria (pomiar kąta obrotu koła;
poślizgi
!!)
– GPS

MSI-w6/23
Pomiar siły
• Stosuje się czujniki siły
• Pomiar dla 6 stopni swobody, pomiędzy
manipulatorem a końcowym układem
wykonawczym
• Umożliwia ruch wzdłuż powierzchni przy
utrzymaniu kontaktu ze stałym naciskiem
(compliant motion = ruch „podatny”)

MSI-w6/24
Odczuwanie dotyku
• „Palce” z elastycznego materiału
• Dokonywany pomiar ugięcia (za pomocą
macierzy czujników)
• Dotyk określany metodami podobnymi do
rozpoznawania obrazów
MSI-w6/25
Sonar
• SOund Navigation and Ranging = nawigacja
i określanie zasięgu za pomocą dźwięku
• Dostarcza użytecznej informacji o obiektach
bardzo blisko robota
• Umożliwia awaryjne zapobieżenie kolizjom
• Efektywny w przypadku omijania przeszkód
• Mało przydatny do opracowywania mapy
(szeroka wiązka dźwięku)

MSI-w6/26
Sensory i systemy wizyjne (1)
• Systemy wizyjne ogólnego przeznaczenia mają
nadal
bardzo ograniczone możliwości
• Skuteczne systemy wizyjne budowane są
gdy jest
ograniczona lista zadań
, które ma wykonywać robot
(np. zakłada się, że przeszkody są płaskie),
• Robot może oświetlać otoczenie światłem o
określonej długości fali (podczerwień, ...)
• Specjalne systemy czujników
mogą być stosowane
do dokładnych pomiarów geometrii obiektów
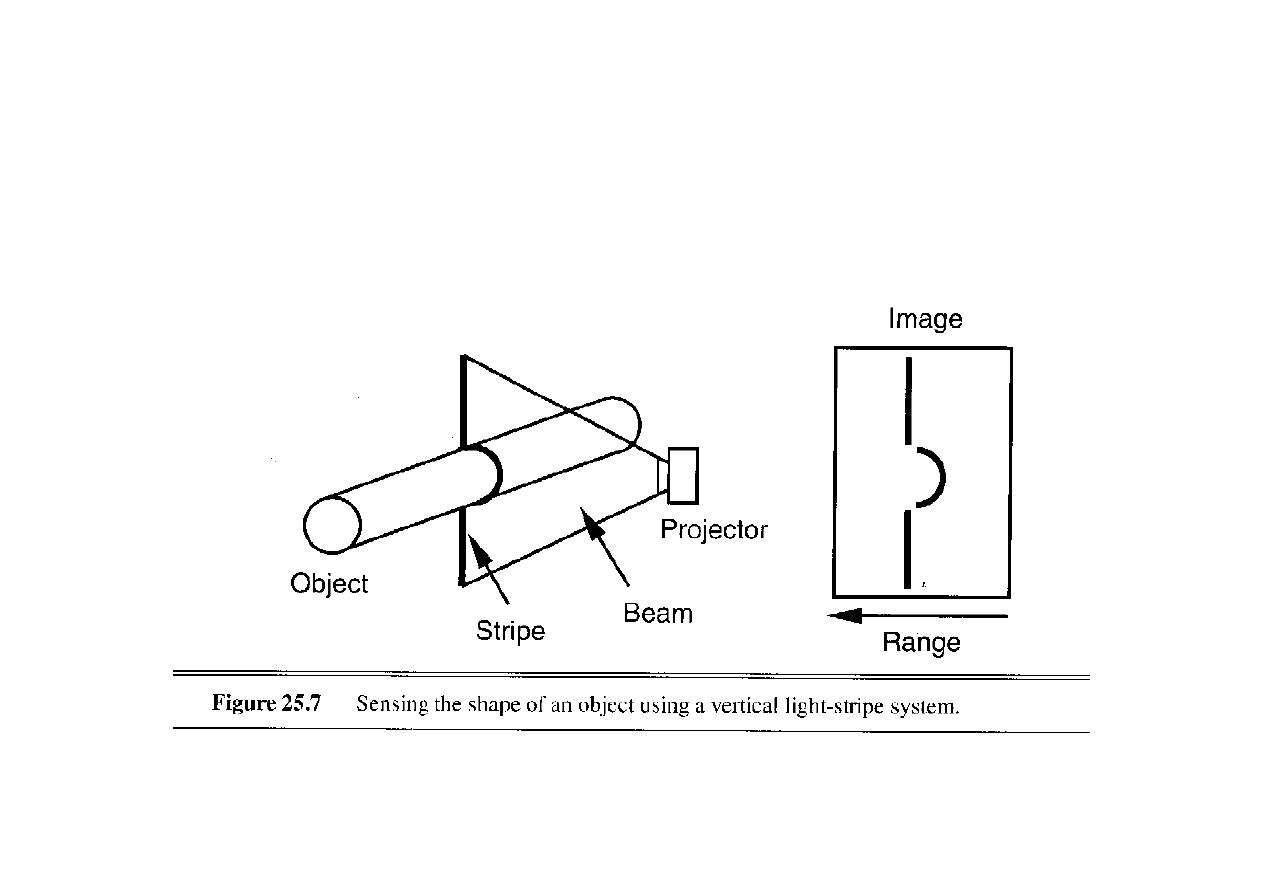
MSI-w6/27
Sensory i systemy wizyjne (2)
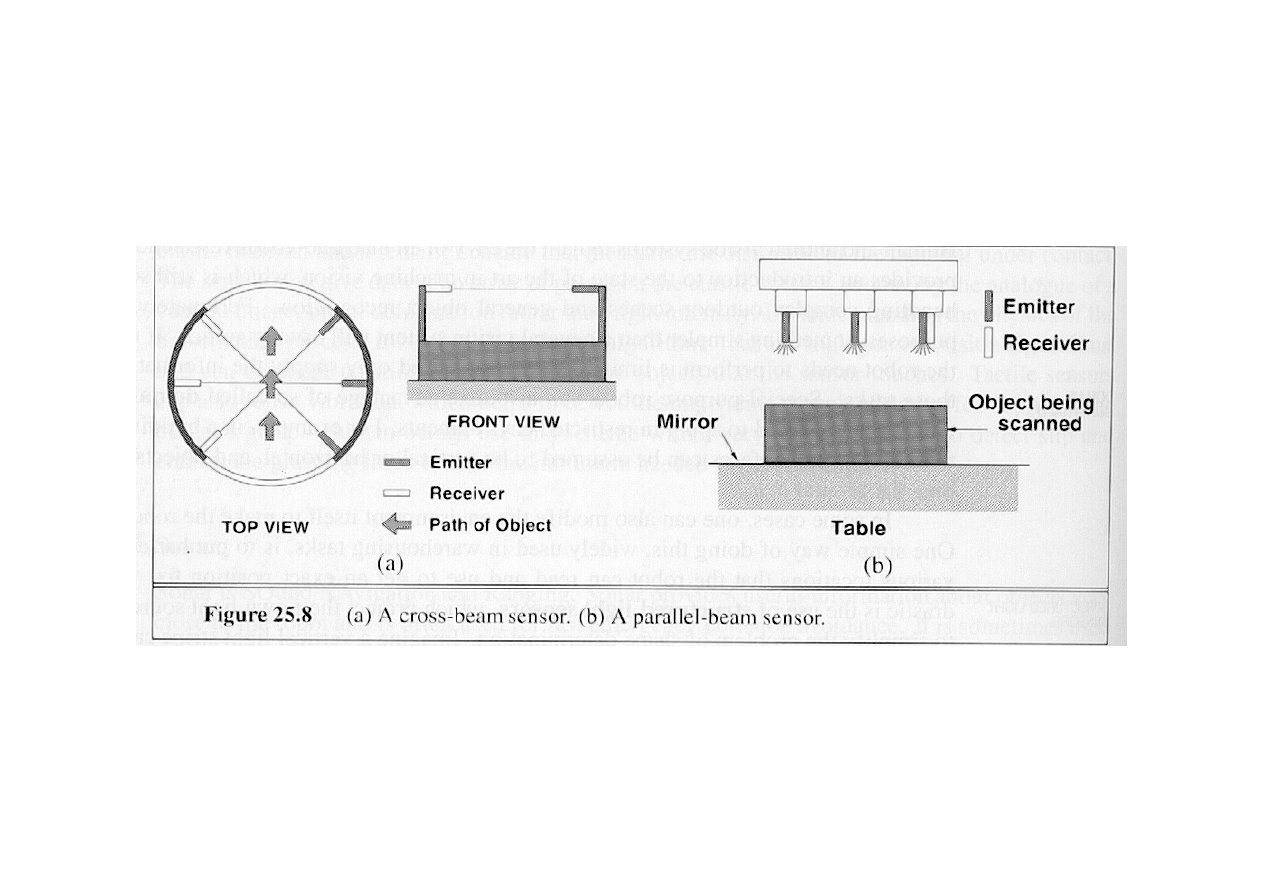
MSI-w6/28
Sensory i systemy wizyjne (3)

MSI-w6/29
Architektury robotów
• Określają sposób organizacji działań,
mających na celu
określanie akcji na
podstawie percepcji
• Podobne do problemu projektowania agenta
w najtrudniejszym wariancie (ze względu
na własności środowiska):
– Duża ilość danych wejściowych
– Potrzeba szybkiej reakcji w niektórych
sytuacjach
MSI-w6/30
Architektura klasyczna
• Poszukiwanie ścieżek i przemieszczanie robota
realizowano przez podprogramy
działań
pośredniego poziomu
(Intermediate-Level
Action=
ILA
)
• ILA składa się ze złożonych procedur
działań
niskiego poziomu
(Low-Level Action=
LLA
)
do sterowania układem robota
• Do planowania zastosowano algorytm
STRIPS

MSI-w6/31
Architektura klasyczna: Przykład
• (ILA): przemieść robota z miejsca X do miejsca Y
– (LLA): zaplanuj ścieżkę stosując algorytm A*
– (LLA): przemieść robota wzdłuż zaplanowanej ścieżki,
korygując tę ścieżkę podczas ruchu
– (LLA): zaktualizuj wewnętrzny model świata
– (LLA): gdy rośnie niepewność położenia, wyślij rozkaz
do systemu wizyjnego w celu określenia nowej pozycji
robota
• System ILA/LLA zapewniał systemowi
planowania stosunkowo jasny i niezawodny ciąg
akcji

MSI-w6/32
System planowania
• Działa wg algorytmu STRIPS
• Układ dowodzenia twierdzeń
efektywnie
generujący
sekwencje akcji
• Wyniki planowania kompilowane do postaci
ogólnych makro-operatorów
(CBR - ułatwia
rozwiązanie podobnych problemów w przyszłości)
• Realizuje
najkrótszą podsekwencję planu
prowadzącą do celu
taką, której warunki wstępne
są spełnione

MSI-w6/33
Automat usytuowany (1)
• Bazuje na koncepcji automatu skończonego:
– Na wejścia podawane sygnały z sensorów,
stosowanych do odbierania bodźców z otoczenia
– Wyjścia podłączone są do układów
wykonawczych robota
• Bardzo efektywna implementacja agenta
odruchowego ze stanem wewnętrznym

MSI-w6/34
Automat usytuowany (2):
Opracowywanie
• Generowanie poprzez
autonomiczny proces
kompilacji
• Manualny proces projektowania oparty na
dekompozycji
zgodnej z różnymi
zachowaniami, którymi robot powinien się
wykazywać

MSI-w6/35
Automat usytuowany (3)
• Sposoby reprezentacji wiedzy:
– Formalna reprezentacja wiedzy przez
projektantów robota
– Wiedza zawarta w architekturze agenta
• Kompilator generuje automat skończony,
którego stany wewnętrzne odpowiadają
zdaniom logicznym dotyczącym środowiska
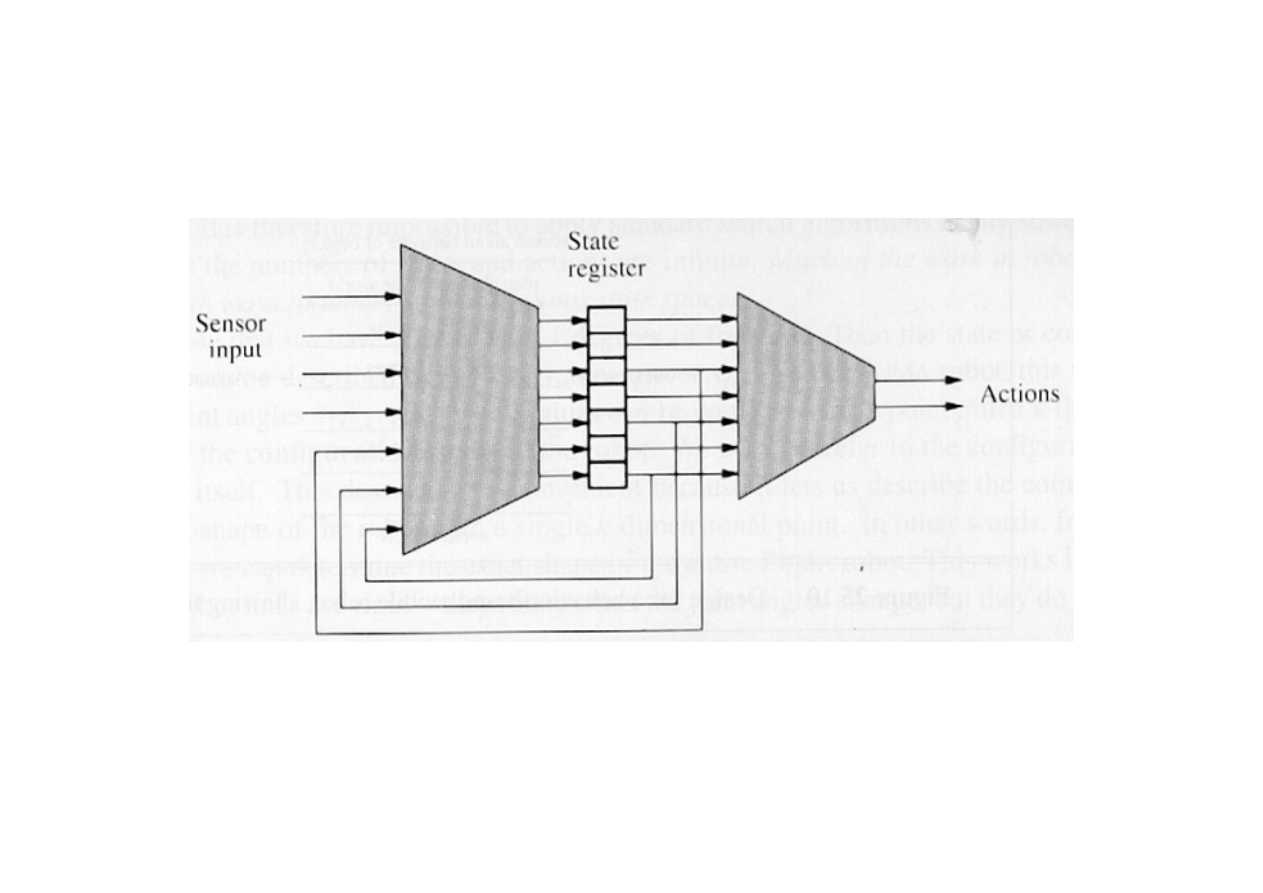
MSI-w6/36
Automat usytuowany (4)
• Każdy automat skończony można zrealizować jako rejestr stanu
aktualizowany przez układ ze sprzężeniem dodatnim, oraz drugi układ
ze sprzężeniem dodatnim aktualizujący wyjście automatu
• Czas obliczeń bardzo krótki
• Nie wymaga jawnej reprezentacji wiedzy

MSI-w6/37
Bazowanie na zachowaniach (1)
• Dekompozycja na moduły realizujące
odpowiednie zachowania (omijanie
przeszkody, podążanie wzdłuż ściany, ...)
• Każdy moduł ma dostęp do sygnałów z
sensorów i może wysyłać sygnały do
układów wykonawczych
• Zachowania są zorganizowane w hierarchie
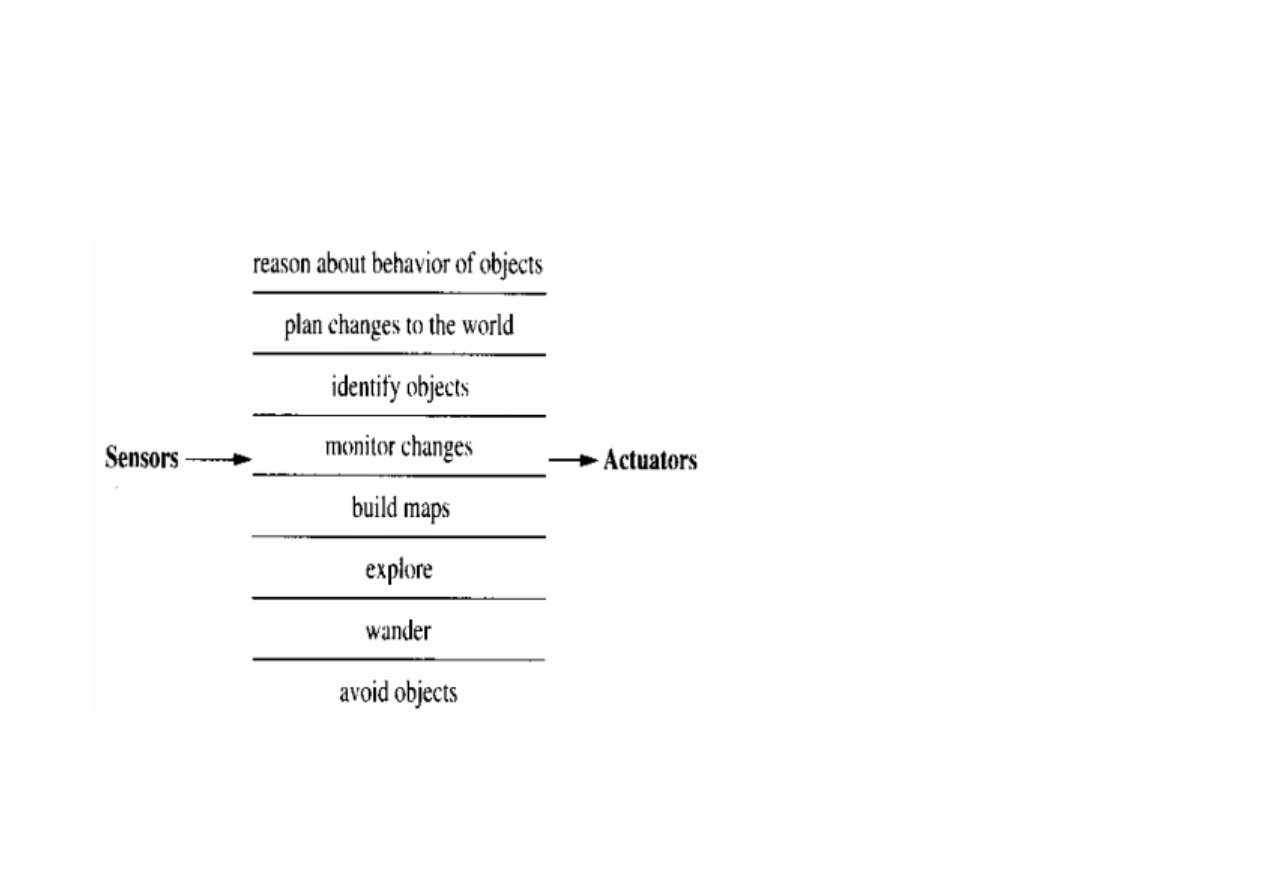
MSI-w6/38
Bazowanie na zachowaniach (2)
• Każdy moduł ma
niezależny dostęp do
sensorów i do efektorów
• Moduły zachowań są
zorganizowane
hierarchicznie: moduły
wyższego poziomu mają
dostęp do zasobów
modułów niższego
poziomu i mogą
modyfikować lub
nadpisywać ich wartości
wyjścia

MSI-w6/39
Bazowanie na zachowaniach (3)
• Wyeliminowanie jako podstawy scentralizowanej,
kompletnej reprezentacji stanów otoczenia (co jest
bardzo kosztowne)
• Stan wewnętrzny potrzebny jedynie do śledzenia
tych stanów otoczenia, które są niedostępne dla
czujników, ale są potrzebne do wyboru akcji w
każdym zachowaniu
• Do reprezentowania stanu wewnętrznego czasem
wystarczy mało pamięci, nawet dla złożonych zadań
Wyszukiwarka
Podobne podstrony:
PiUS w6 Spawwosloniegazow cz1
MSI 2006 w3
transport i handel morski w6 (29 03 2006) MNO5ZYCMRQINADQB2SZQHFUDZCSYDHJO7C2ZOLA
finanse międzynarodowe w6 (28 03 2006) WLCFVQW4Q2NNJK7ZAVRRTQHZFTKWTGI4UPCE57Y
MSI 2006 w2
MSI 2006 w1
MSI 2006 w4
MSI AiR w6 2004
MSI 2006 w7
MSI 2006 w3
MSI 2006 w4
MSI 2006 w3
MSI 2006 w2
W6 Technika harmonogramów i CPM
w6 Czołowe przekładanie walcowe o zebach srubowych
puchar swiata 2006 www prezentacje org
Gospodarka płynami kwiecień 2006
więcej podobnych podstron