
Automatyka i Robotyka
2011/12
Fizyka 1
Materiały do wykładu 4
28 10 2011
⃗
dr
⃗
F
⃗
F =
d ⃗p
dt
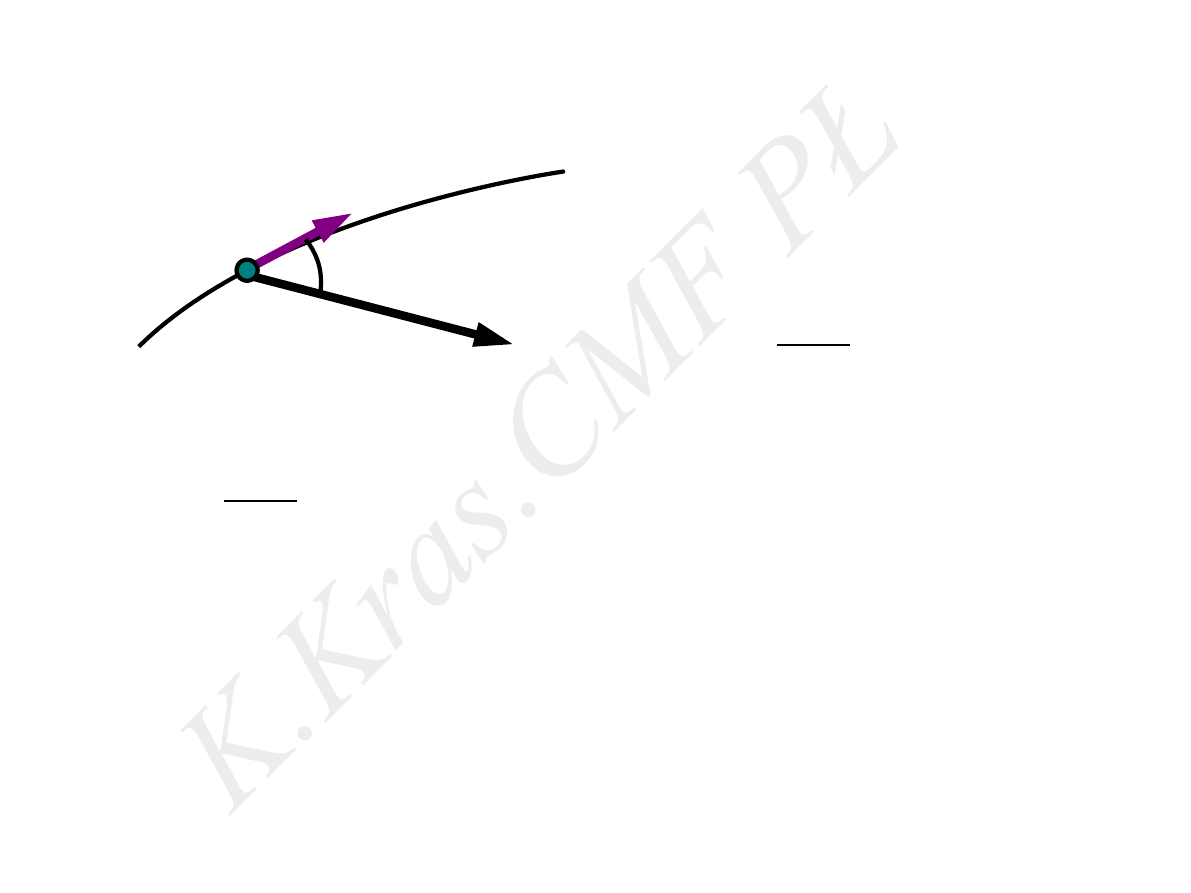
dW =
d ⃗p
dt
⋅⃗
dr = ⃗F⋅⃗
dr
m
ϕ
∣ ⃗
dr∣= ds
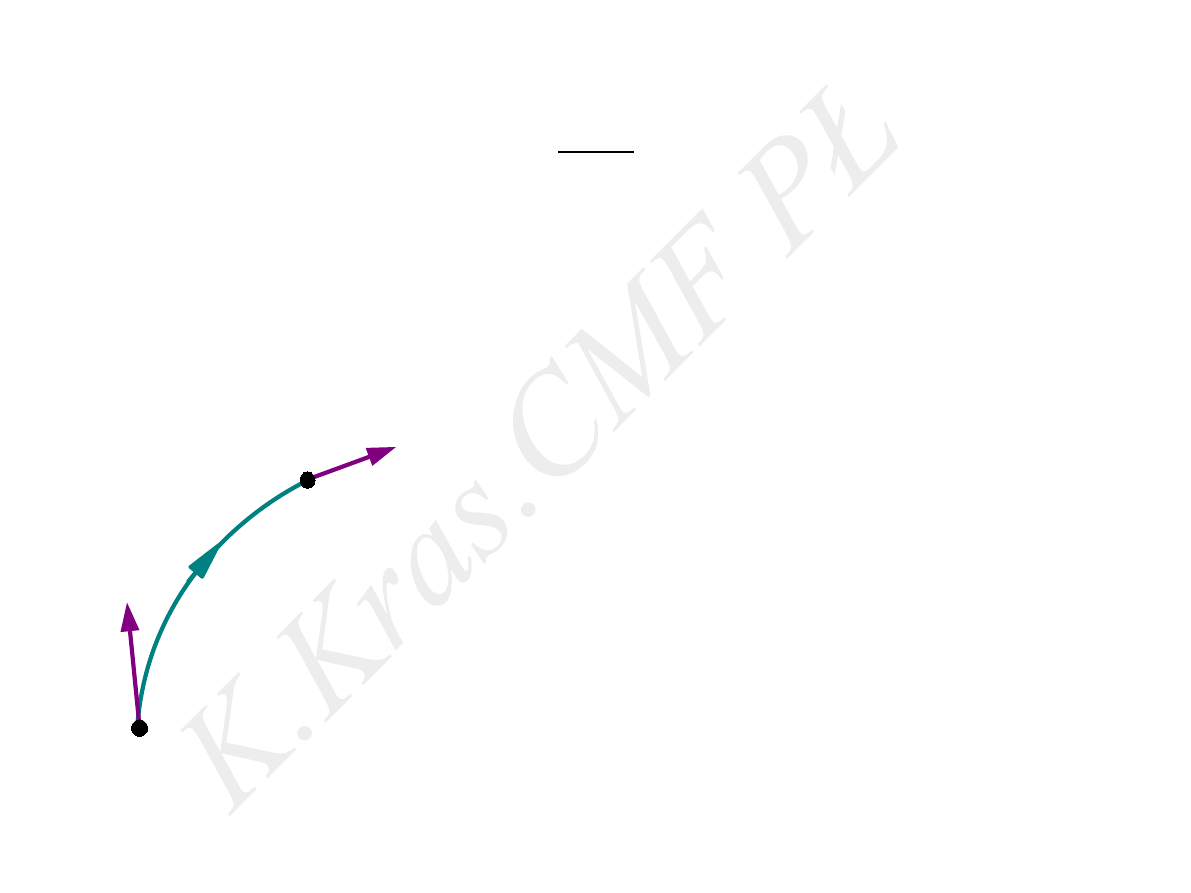
dW = ⃗
F⋅⃗
dr =F ds cos( ⃗
F , ⃗
dr) = F ds cos ϕ
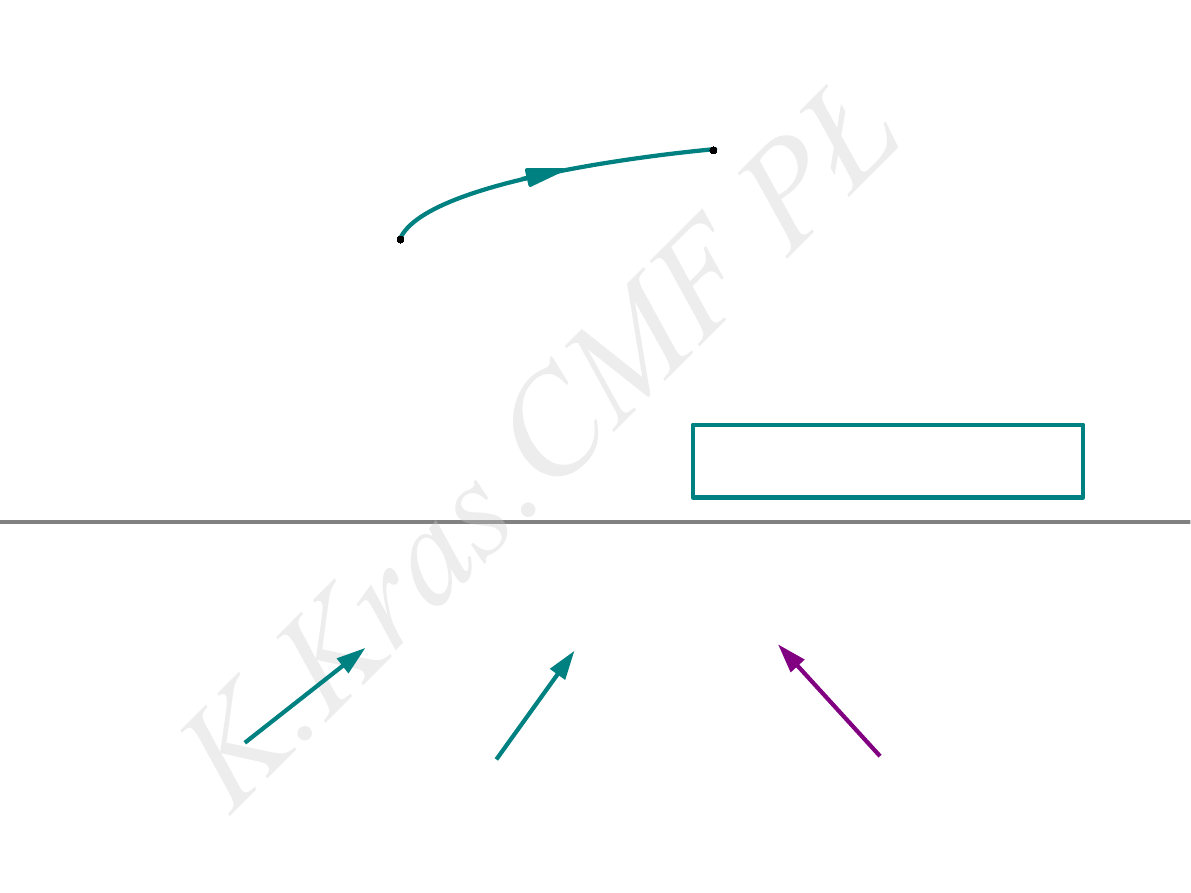
praca
⃗
F ≠const , ϕ≠const
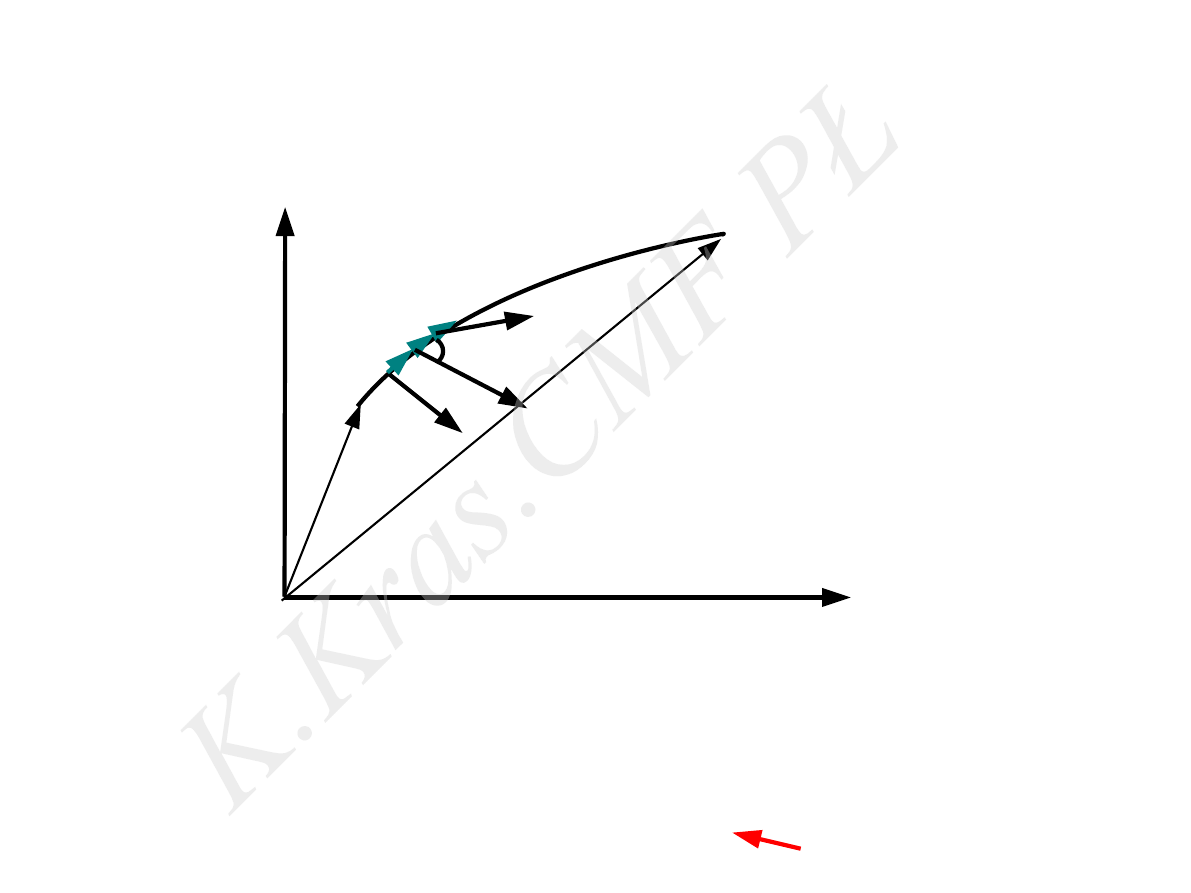
A
B
l
X
Y
⃗
r
A
⃗
r
B
⃗
d r
i
⃗
F
i
ϕ
i
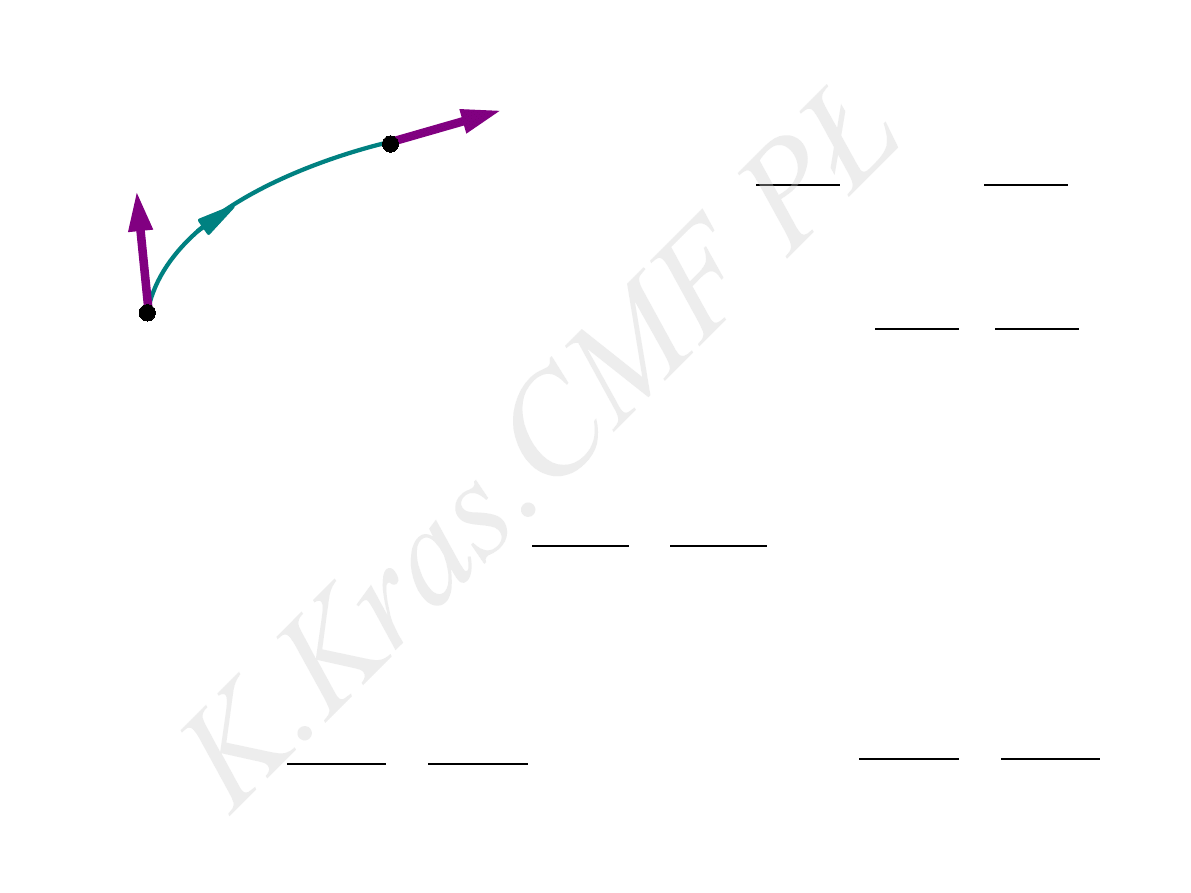
W
AB (l )
=
∫
A(l )
B
⃗
F⋅⃗
dr =
∫
A(l )
B
F ds cos ϕ
!
praca
⃗
F ≠const
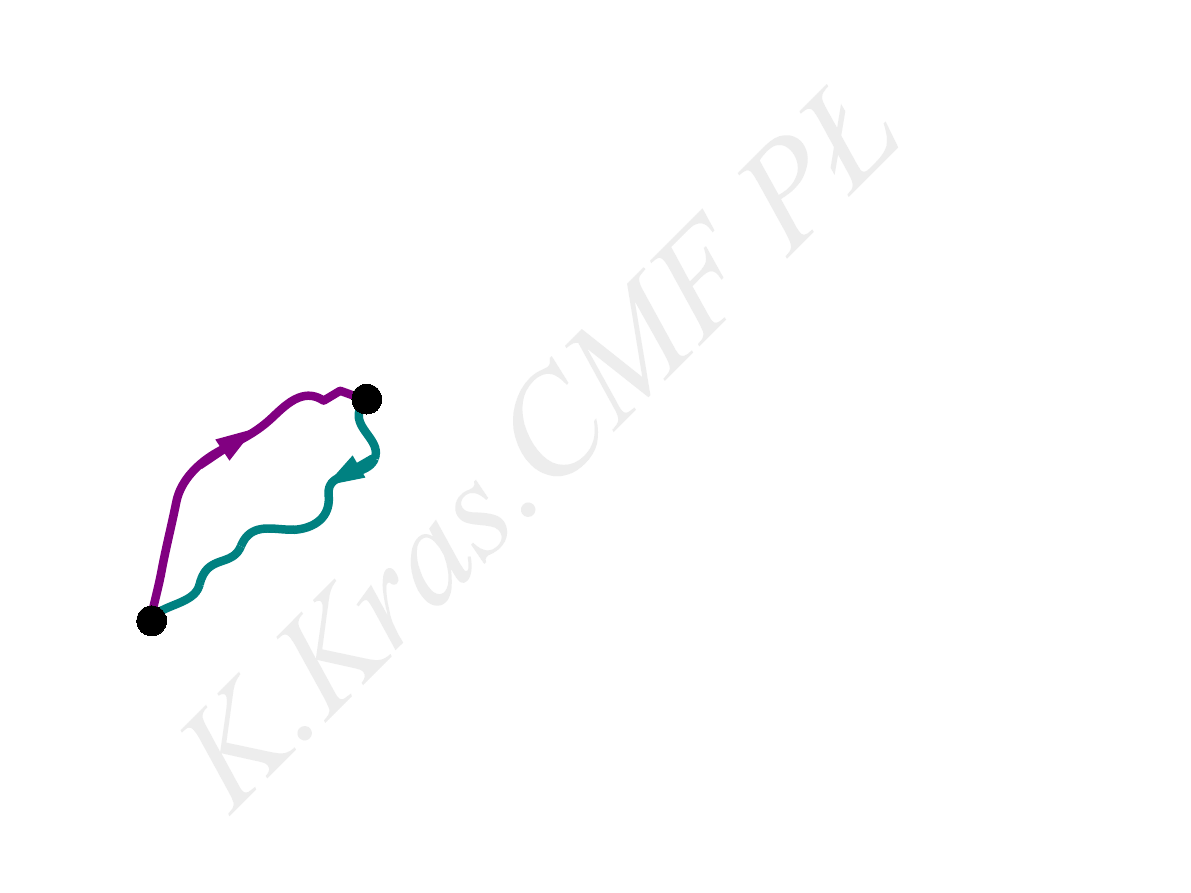
siła zachowawcza
W
AA
=
0
W
AA
=
W
AB (l
1
)
+
W
BA(l
2
)
=
0
l
1
l
2
A
B
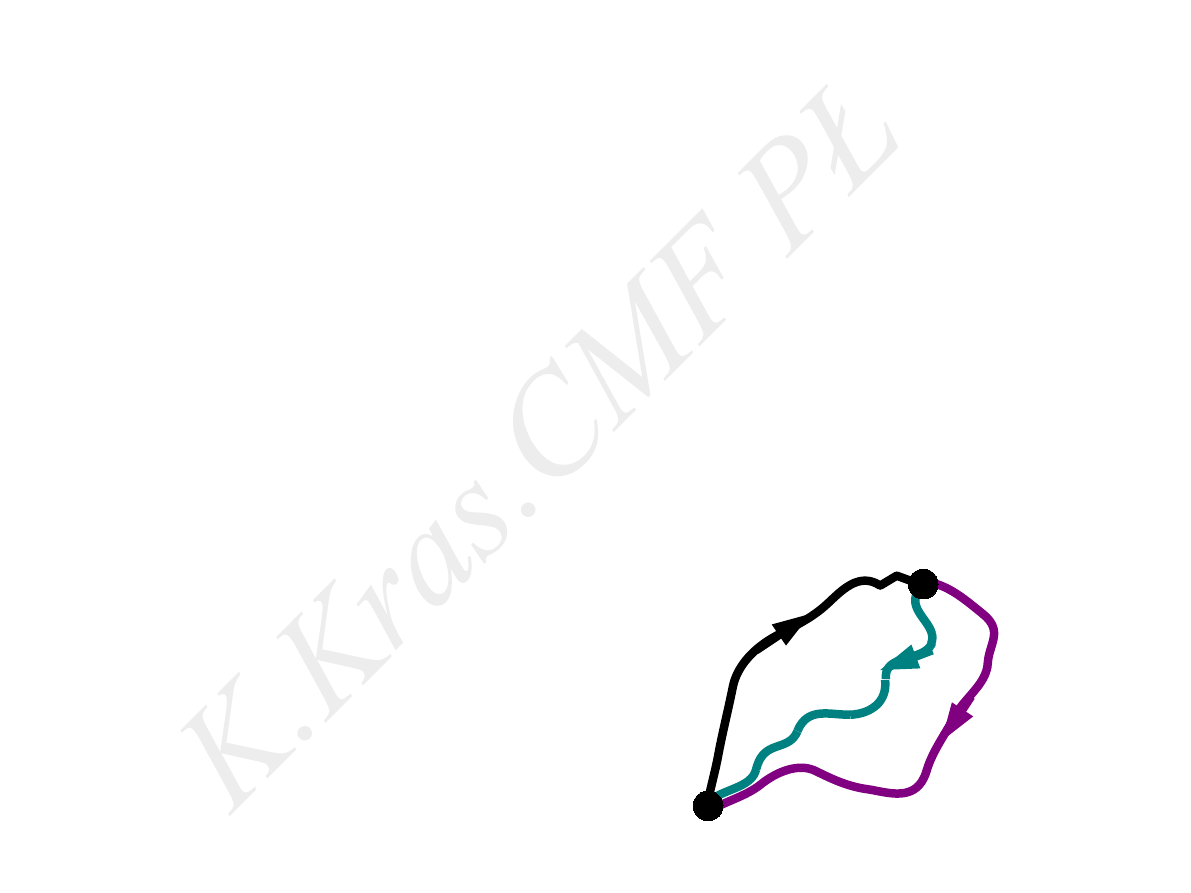
siła zachowawcza
W
AA
=
0
W
BA(l
1
)
=
W
BA(l
2
)
B
A
s
l
1
l
2
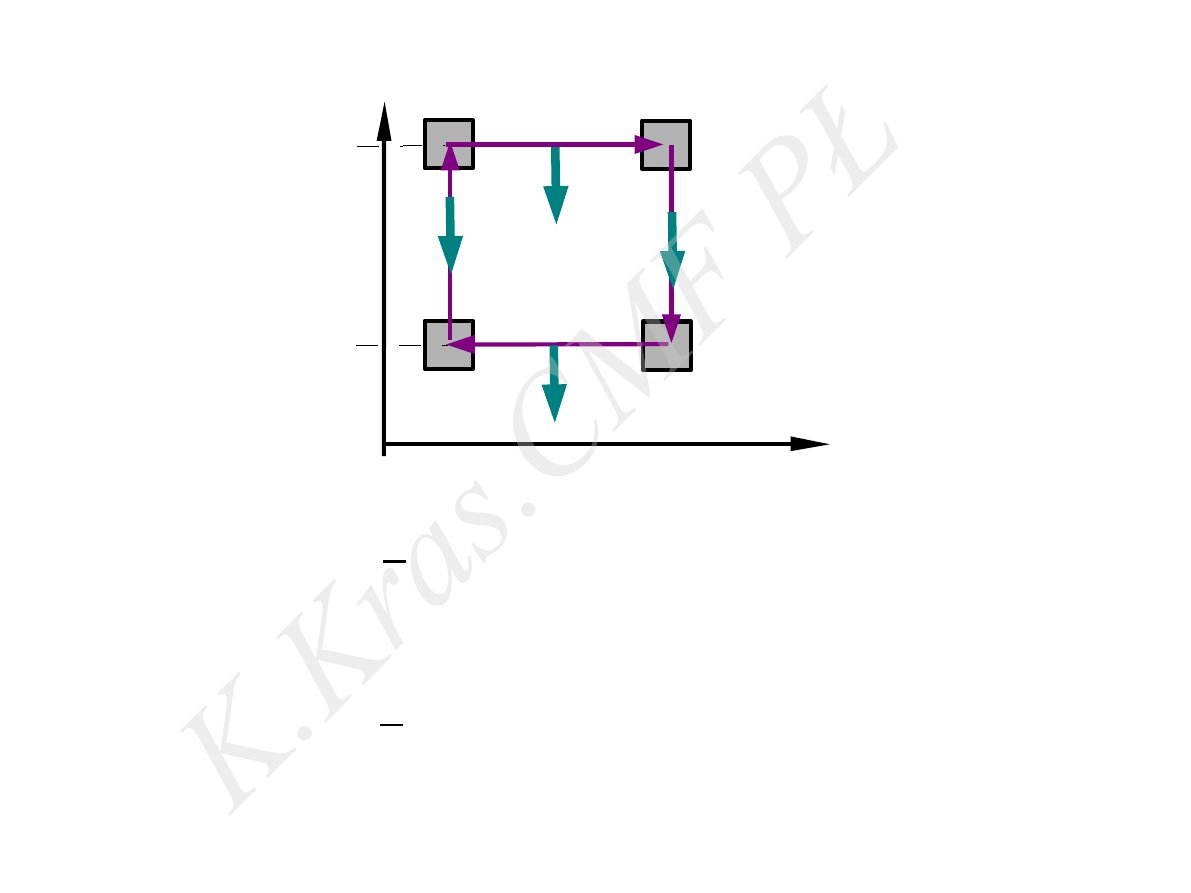
mg
mg
h
A
B
mg
C
mg
D
s
s
y
x
W
AB
= ⃗
mg⋅⃗h = mg h cos π = mg h(−1)
W
BC
=⃗
mg⋅⃗s = mg scos π
2
=
mg s⋅(0) =0
W
CD
= ⃗
mg⋅⃗h = mg h cos 0 = mg h(1)
W
DA
= ⃗
mg⋅⃗s = mg scos π
2
=
mg s⋅(0) =0
W
AA
=
W
AB
+
W
BC
+
W
CD
+
W
DA
−
mgh+0+mgh+0=0
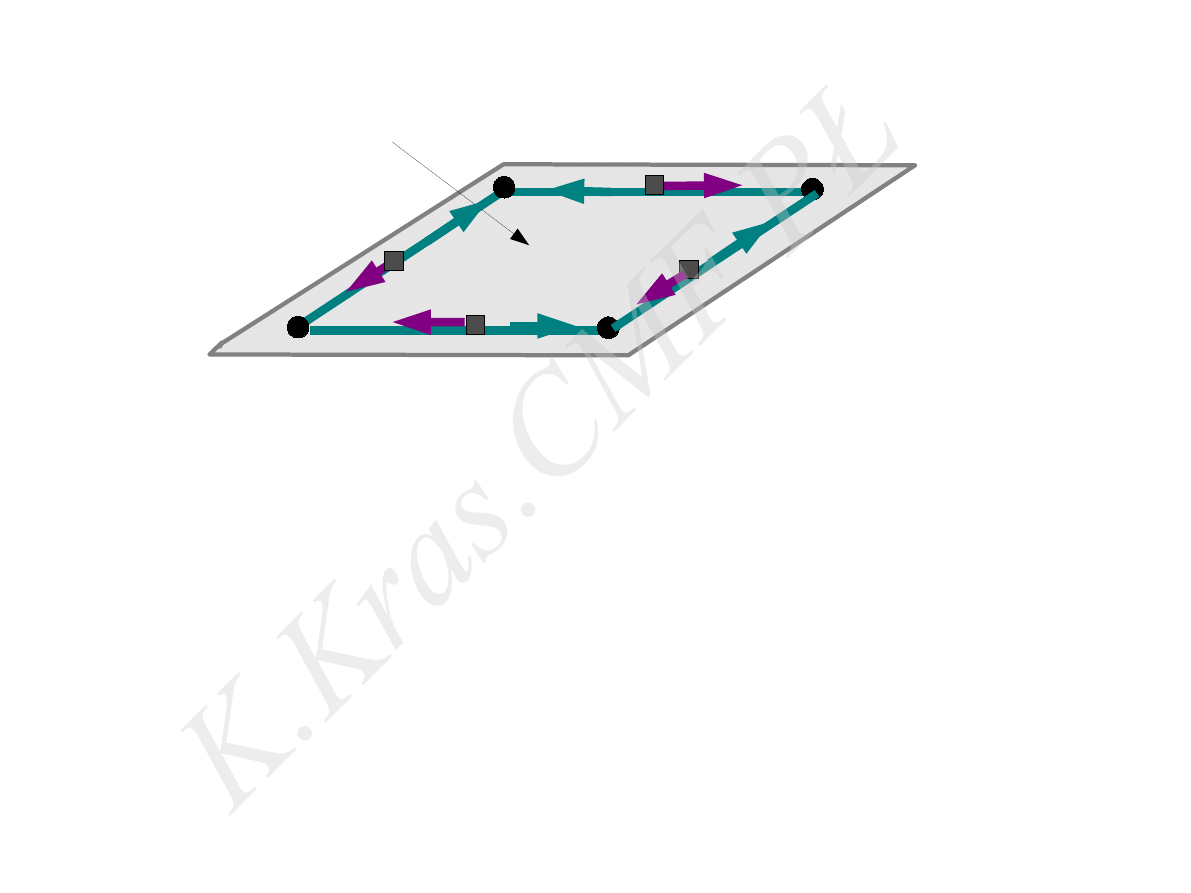
praca siły ciężkości na drodze zamkniętej (1)
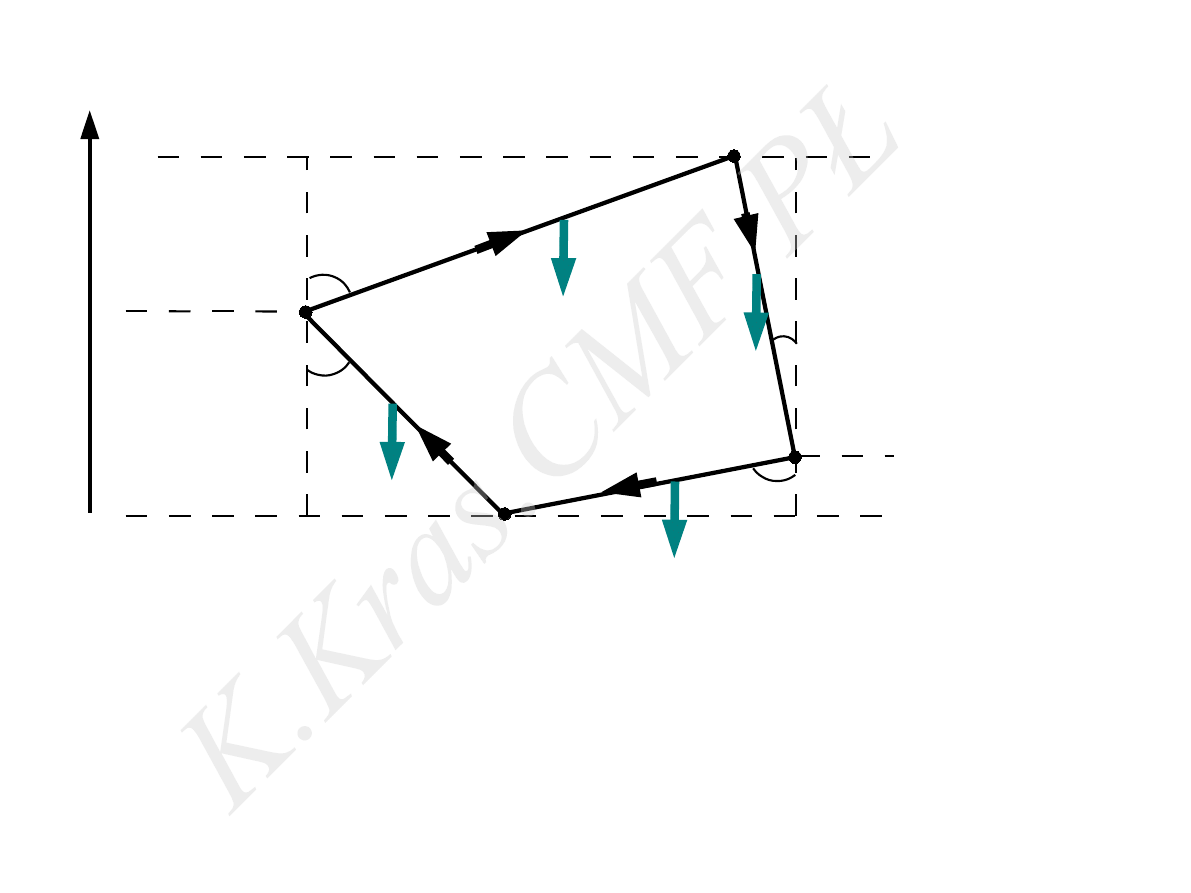
A
B
C
D
a
b
c
d
α
β
γ
δ
⃗
mg
⃗
mg
⃗
mg
⃗
mg
W
AA
=
W
a
+
W
b
+
W
c
+
W
d
y
a
y
b
y
c
y
d
y
W
AA
= −
mg a cos α−mg b cosβ+mg c cos γ+mg d cos δ
W
AA
= −
mg (a
y
+
b
y
)+
mg (c
y
+
d
y
) =
0
praca siły ciężkości na drodze zamkniętej (2)
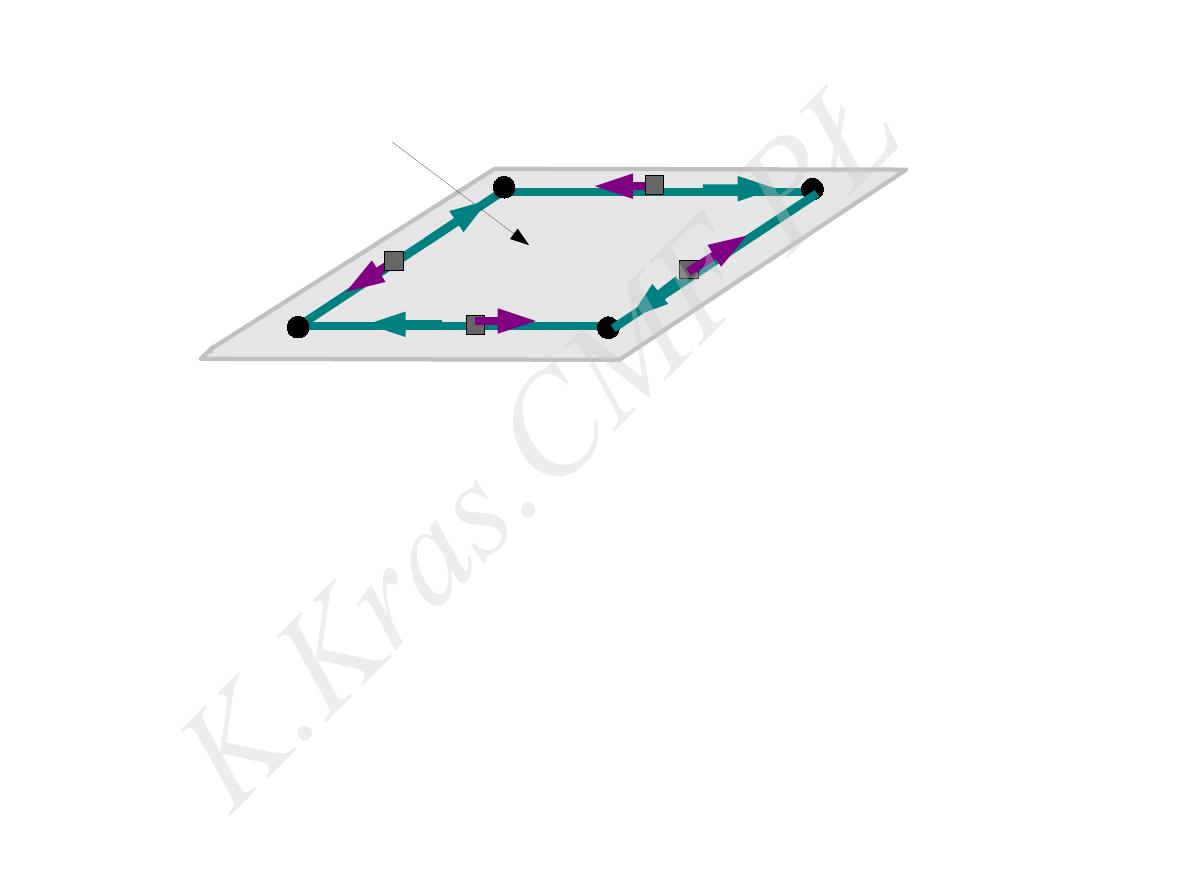
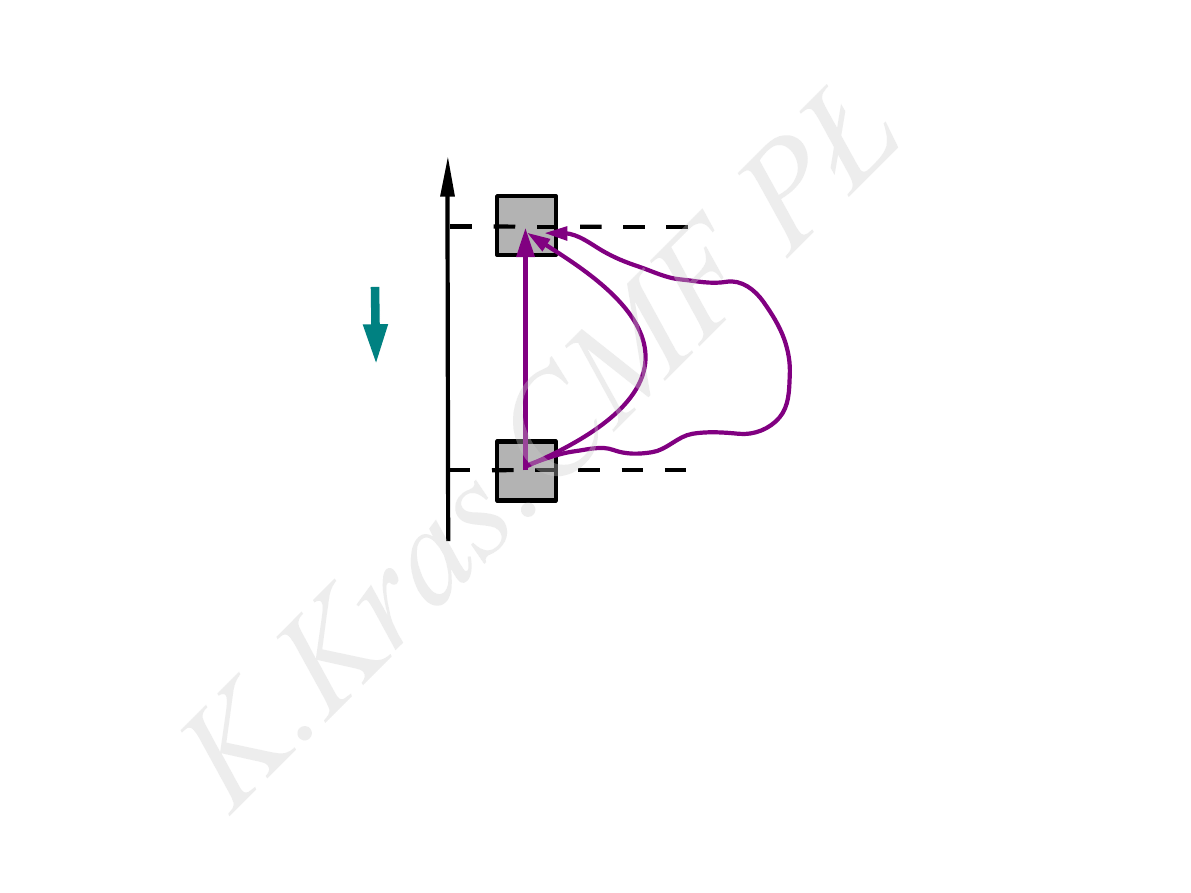
praca siły tarcia na drodze zamkniętej
A
B
⃗
T
⃗
T
⃗
T
f = cons.
⃗
T
s
W
(
AB)
=⃗
T⋅⃗s = T s cosπ = =−T s
W
(
AA)
=−
Ts−Ts−Ts−Ts = −4T s ≠ 0
C
D
s
s
s
W
(
BC )
=⃗
T⋅⃗s = T s cos π = =−T s
W
(
CD)
=⃗
T⋅⃗s = T s cos π = =−T s
W
(
DA)
=⃗
T⋅⃗s = T s cos π = =−T s
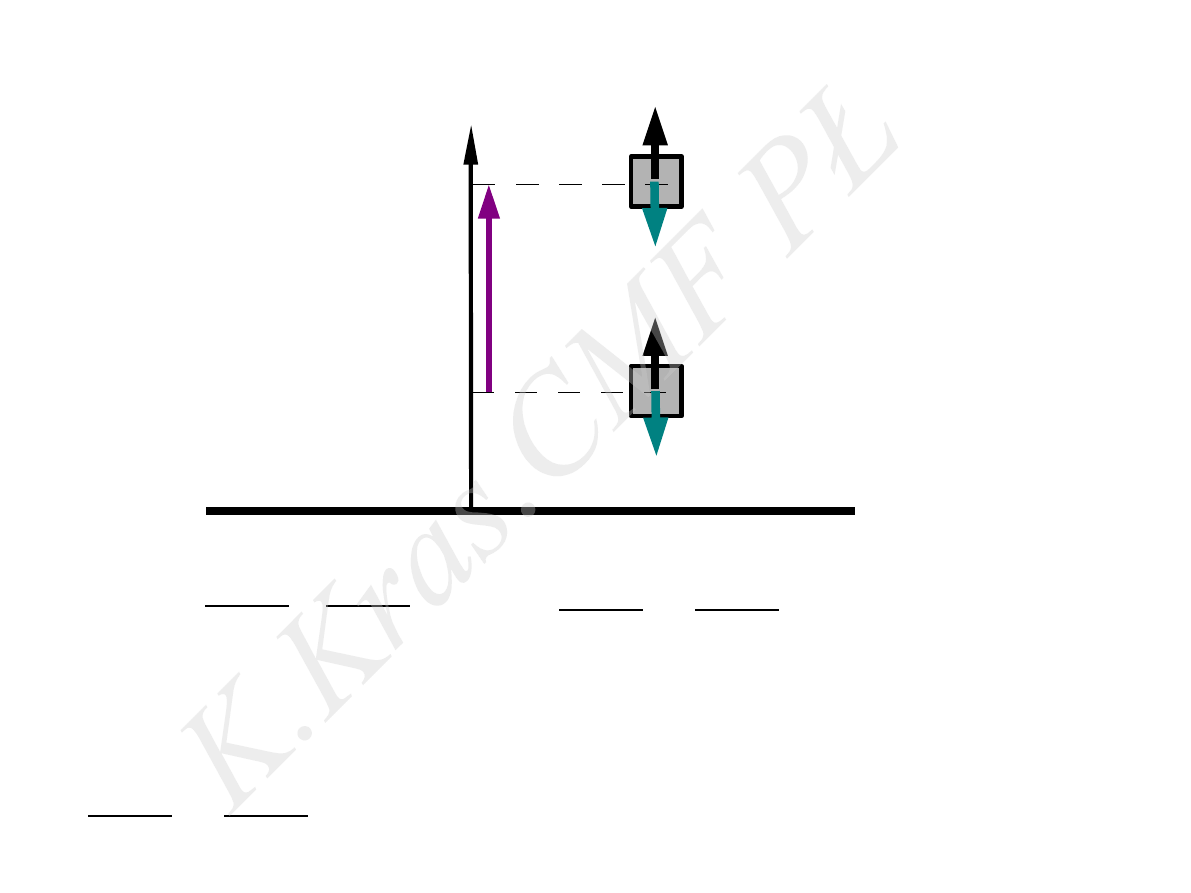
⃗
F = ⃗F (⃗r)
W = ⃗F⋅⃗
Δ
r = −Δ E
p
(⃗r)
siła zachowawcza
zależy
wyłącznie
od położenia
„energia potencjalna” ma sens
wyłącznie
dla sił zachowawczych
dW = ⃗
F⋅⃗
dr = −d E
p
(⃗r)
energia
potencjalna
E
p
funkcja położenia, ciągła,
skalarna
,
mająca ciągłe pochodne, niezależna od czasu
A
B
W
AB
E
pA
E
pB
E
pA
+Δ
E
p
=
E
pB
E
pA
−
E
pB
=− Δ
E
p
=
W
AB
praca siły zachowawczej
dowolna wartość E
pA
lub E
pB
E
pB
=
E
pA
−
W
AB
praca
siły zachowawczej
na drodze AB
energia
potencjalna
w punkcie B
energia
potencjalna
w punkcie A
mg
s
1
A
B
E
pA
E
pB
E
pB
=
E
pA
−
W
s
1
y
energia potencjalna siły mg
s
2
s
3
E
pB
=
E
pA
−
W
s
2
E
pB
=
E
pA
−
W
s
3
W
s
1
=
W
s
2
=
W
s
3
E
pB
=
const
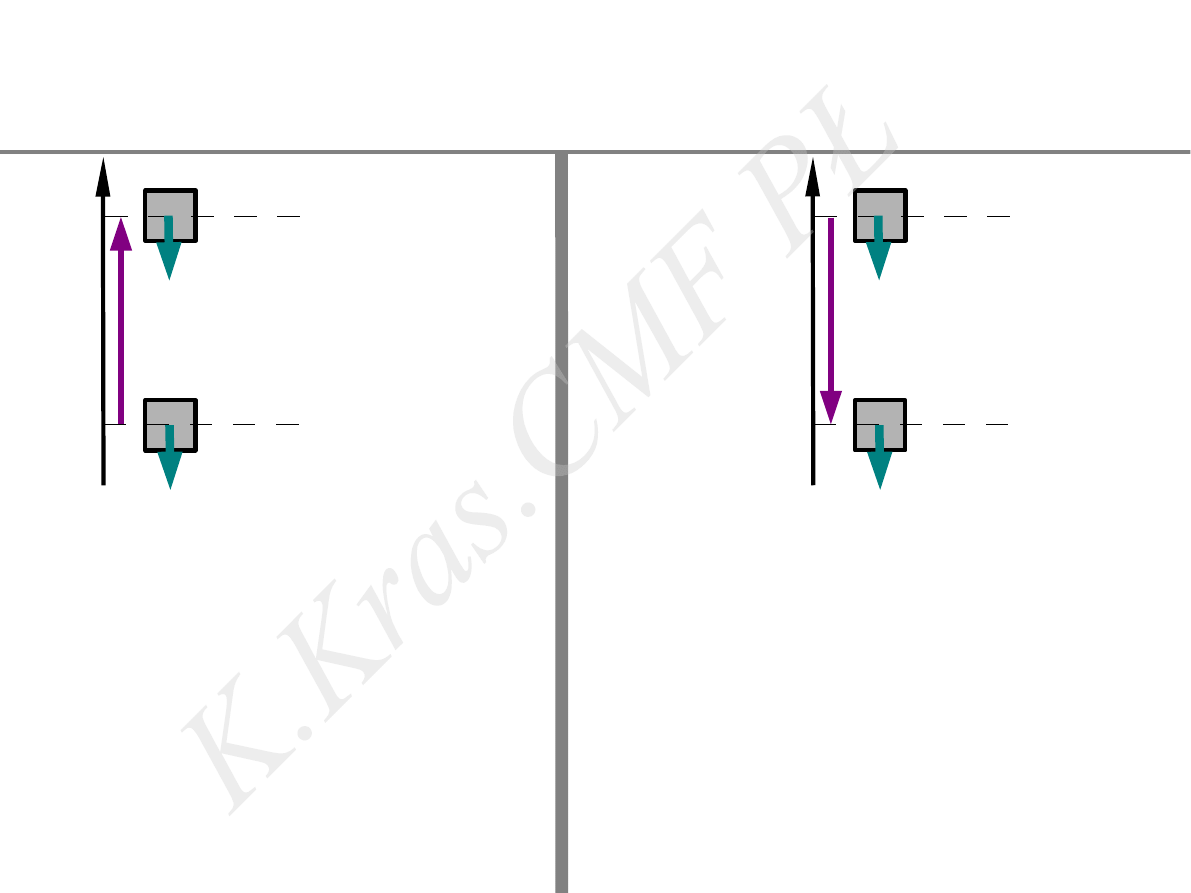
praca siły tarcia na drodze A-B
A
B
⃗
T
⃗
T
⃗
T
f = cons.
⃗
T
s
W
1( AB)
=−
T s
dla sił tarcia
nie
ma sensu pojęcie energii potencjalnej
C
D
s
s
s
W
2( AB)
=
W
AD
+
W
DC
+
W
CB
=−
T s−T s−T s =−3T s
E
pB
=
E
pA
−
W
1( AB)
=
E
pA
+
Ts
E
pB
=
E
pA
−
W
2( AB)
=
E
pA
+
3Ts
?
mg
mg
h
A
B
E
pA
E
pB
E
pB
=
E
pA
+Δ
E
p
=
E
pA
−
W
AB
E
pB
=
E
pA
+
mg h>E
pA
y
energia potencjalna siły mg
E
pB
=
E
pA
−
mg h(−1)
mg
mg
h
A
B
E
pA
E
pB
y
E
pA
=
E
pB
+Δ
E
p
=
E
pB
−
W
BA
E
pA
=
E
pB
−
mg h
E
pA
=
E
pB
−
mg h<E
pB
energia mechaniczna
E
k
=
mV
2
2
energia kinetyczna
E
p
energia potencjalna
E
pA
+
E
kA
=
E
pB
+
E
kB
zasada zachowania energii mechanicznej
A
B
W
AB
E
pA
E
pB
⃗
V
A
⃗
V
B
E = E
k
+
E
p
A
B
W
AB
E
pA
E
pB
⃗
V
A
⃗
V
B
zasada zachowania energii mechanicznej
E
pA
+
m V
A
2
2
=
E
pB
+
m V
B
2
2
E
pA
−
E
pB
=
mV
B
2
2
−
mV
A
2
2
E
pA
−
E
pB
=
W
AB
W
AB
=
mV
B
2
2
−
mV
A
2
2
W
AB
>
0⇒
m V
B
2
2
>
mV
A
2
2
W
AB
<
0⇒
m V
B
2
2
<
mV
A
2
2
zasada zachowania energii mechanicznej w polu siły mg
mg
mg
h
A
B
E
pA
E
pB
y
V
B
V
A
W
AB
=
m V
B
2
2
−
mV
A
2
2
mV
B
2
2
=
m V
A
2
2
+
W
AB
W
AB
= ⃗
mg⋅⃗h = mg h cos π = mg h(−1)
mV
B
2
2
=
m V
A
2
2
−
mgh
V
B
<
V
A
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
Wyszukiwarka
Podobne podstrony:
Materiały do wykładu 4 (27 10 2011)
Materiały do wykładu 3 (20 10 2011)
Materiały do wykładu 3 (21 10 2011)
Materiały do wykładu 2 (13 10 2011)
Materiały do wykładu 4 (27 10 2011)
Materiały do wykładu 7 (18 11 2011)
Materiały do wykładu 7 (17 11 2011)
VAT w działalności gospodarczej Materialy do wykladu - VAT w dzialalnosci - 2011 rok, dostawy krajow
Materialy do wykladu 1 (06 10 2 Nieznany
Materiały do wykładu 6 (04 11 2011)
Materiały do wykładu 5 (03 11 2011)
więcej podobnych podstron