STANISŁAW RUTKOWSKI
WSM GDYNIA
S T A T Y C Z N A I DYNAMICZNA REGULACJA
SILNIKÓW OKRĘTOWYCH GWARANTUJĄCA
ICH BEZPIECZNĄ EKSPLOATACJĘ
Informacje wstępne
W procesie montażu nowych okrętowych silników spalinowych lub
po ich kapitalnym remoncie, przeprowadza się regulacje, zgodnie z
zaleceniami przewidzianymi w DTR. Silniki okrętowe zwykle reguluje
się przy znamionowych parametrach pracy. Każdy typ silnika wymaga
specyficznych czynności regulacyjnych przy zastosowaniu przewidzia-
nych przez producenta narzędzi. Niemniej jednak sama regulacja ma
pewne cechy ogólne, obejmujące różne grupy silników. Znajomość
zatem podstawowych czynności regulacyjnych, sposobów i kolejności
jej wykonywania, umożliwi regulację wszystkich typów silników
okrętowych.
Regulacja dotyczy przede wszystkim rozrządu silnika oraz układu
wtryskowego. Do układu rozrządu zalicza się mechanizmy sterujące
dolotem świeżego ładunku powietrza do cylindrów oraz wylotem spalin.
Regulacji wymaga również rozdzielacz powietrza sterujący otwarciem
zaworów rozruchowych - zwykle typu „odciążonego". Regulacja
obejmuje ponadto ustawienie kątów rzeczywistego wyprzedzenia
wtrysku paliwa oraz wstępnego napięcia iglic wtryskiwaczy.
Tok postępowania przy regulacji statycznej, dotyczącej czynności
niezbędnych przed uruchomieniem silnika, obejmuje ustawienie lub
tylko korekty:
- położenia wskaźnika, względem którego wyznacza się górne
martwe położenie tłoka - GMP
- luzów zaworowych
- faz rozrządu

- rzeczywistych kątów wyprzedzenia wtrysku paliwa
poszczególnych sekcji tłoczących
- wstępnego napięcia iglic wtryskiwaczy
- rozdzielacza powietrza rozruchowego.
Przed rozruchem silnika należy uprzednio odpowiedio przygotować
wszystkie układy obsługujące silnik, zgodnie z zaleceniami producenta
podanymi w DTR.
Należy pamiętać, że nowy silnik lub będący po remoncie kapitalnym,
musi być odpowiednio docierany według specjalnego programu prze-
widzianego dla danego typu silnika przez producenta.
Po odpowiednim dotarciu silnika przeprowadza się końcową regu-
lację obciążeniową (dynamiczną) cylindrów.
Wiadomo, że podczas długotrwałej eksploatacji silników niektóre
jego części, a szczególnie pierścienie tłokowe, zawory oraz pompy
wtryskowe i wtryskiwacze zużywają się nierównomiernie. Powoduje to
nierównomierny rozkład obciążeń poszczególnych cylindrów. W
związku z tym zaleca się przeprowadzanie okresowych, ogólnych
sprawdzianów rozdziału obciążeń poszczególnych cylindrów i w razie
konieczności wprowadzanie korekt regulacyjnych.
Prostym , a zarazem ważnym wskaźnikiem prawidłowej pracy silnika
jest zabarwienie spalin uchodzących z komina. Przy prawidłowym
przebiegu procesów spalania powinny być one prawie bezbarwne.
Czarny dym, unoszący duże ilości sadzy, może świadczyć o przecią-
żeniu całego silnika lub tylko jednego z cylindrów, o tzw.„laniu"
wtryskiwaczy lub o braku powietrza dostarczanego w czasie prze-
płukania do cylindrów. Taka sytuacja wymaga natychmiastowego
zmniejszenia obciążenia silnika i następnie czynności kontrolnych celem
wykrycia i usunięcia przyczyn nieprawidłowego przebiegu procesów
spalania.
W przypadku pojawienia się spalin o białym zabarwieniu (duże ilości
pary wodnej w spalinach) należy wnioskować, że woda chłodząca
przedostaje się do komory spalania (pęknięta głowica lub tłok - jeżeli
jest chłodzony wodą). Niesprawność przy najbliższej okazji należy
wykryć i usunąć.
W przypadku niebieskiego zabarwienia spalin można wnioskować o
przedostawaniu się oleju smarowego do komory spalania przez pęknięcia
w denku tłoka, przy jego chłodzeniu olejem, tłoczonym pod znacznym
ciśnieniem z układu smarowego łożysk wału korbowego. Denka tłoków
ulegają częstym pęknięciom szczególnie w przypadkach, gdy producent
wykonał gwintowane otwory w ich środku dla tzw. śrub „oczkowych",
służących do podnoszenia tłoków wraz z górnymi częściami korbo-
wodów. Zaistniałe pęknięcia były już przyczynami poważnych awarii
silników. Należy pamiętać również, że w takiej sytuacji może się
zdarzyć, iż mimo odcięcia paliwa silnika nie można zatrzymać ponieważ
jest zasilany olejem tłoczonym przez te pęknięcia. Należy wówczas
odciąć dopływ powietrza do cylindrów, do spalania bowiem konieczne
jest zarówno paliwo, jak i powietrze (tlen).
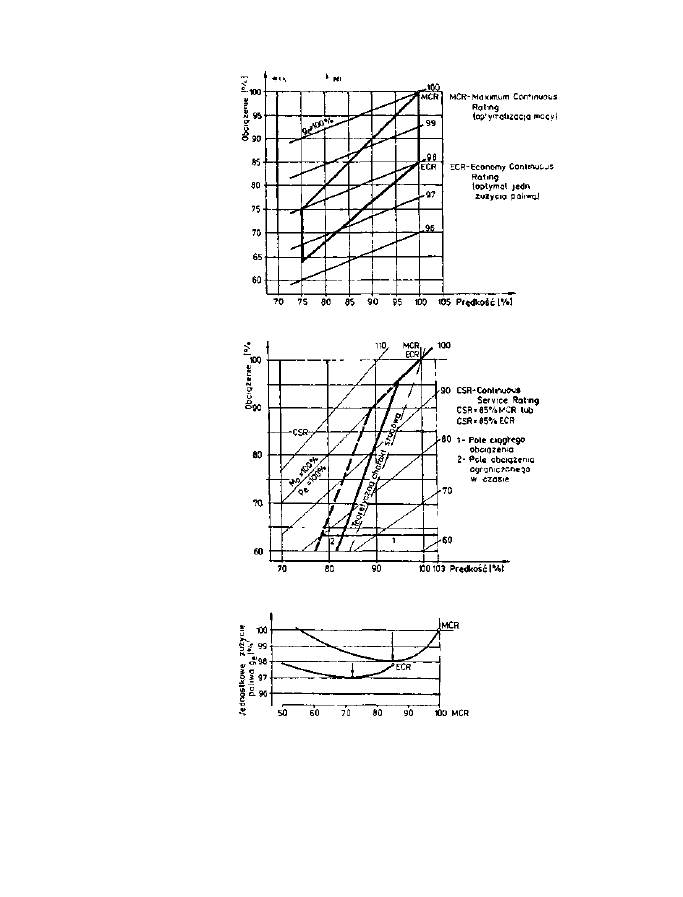
Regulację obciążeniową przeprowadza się przy parametrach silnika
odpowiadających warunkom „MCR" (maximum continuous rating -
100% Ne oraz 100% lub przy obciążeniu „ECR"(economy continu-
ous rating) - parametry odpowiadające najmniejszemu jednostkowemu
zużyciu paliwa.
Na rys.1 przedstawiono wykresy ilustrujące opisane parametry (7, 8)
Wiadomo, że silnik przez ograniczony czas może pracować przy
przeciążeniu odpowiadającym „OR" (Overload rating), które zwykle
odpowiada wartościom oraz
Przeciążać silnik można raz na 12 godzin pracy w czasie nie dłuższym
niż 1 godzina.
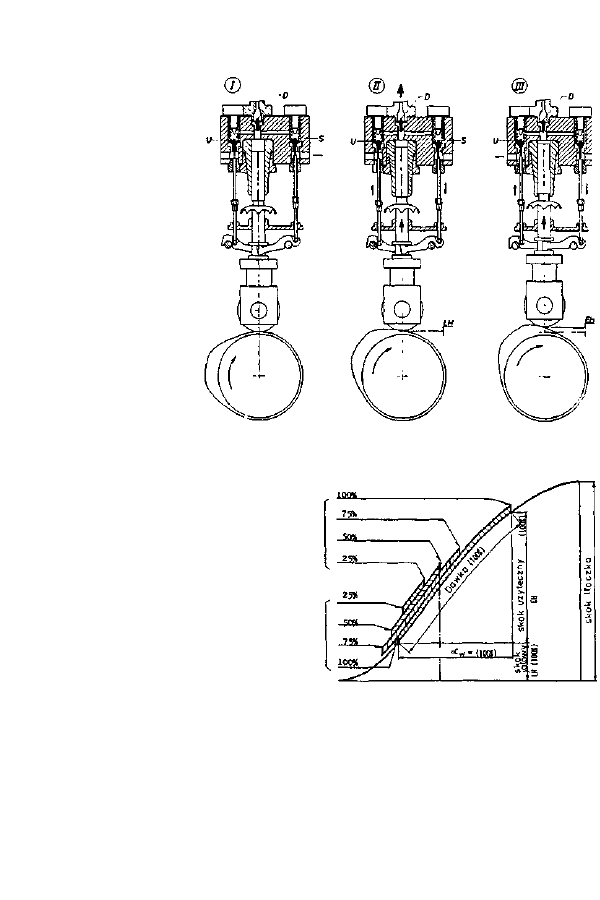
Kontrola ,,GMP" jednego z tłoków
Górne martwe położenie tłoków (GMP) odczytuje się na skali
wygrawerowanej na wieńcu koła zamachowego znajdującym się
naprzeciw wskaźnika (strzałki) zamocowanej na osłonie lub obudowie
silnika.
Koło zamachowe jest jednoznacznie zamontowane na stożku końca
wału karbowego i jego przemieszczanie się jest niemożliwe. Natomiast
w czasie przeprowadzanych remontów czy przeglądów może ulec
przesunięciu wskaźnik (strzałka) i z tego powodu konieczna jest
okresowa kontrola jego prawidłowego położenia. Na skali koła zama-
chowego oznaczone są nie tylko położenie GMP tłoków, lecz również
wartości kątów dla poszczególnych cylindrów oraz w przypadku
silników 4-suwowych kąty wyprzedzania otwarcia i opóźnienia zam
50 70 60 90 100 ECP Obcigzenie [%!
Rys.l. Wykresy ilustrujące charakterystyczne wartości obciążeń „MCR" oraz
„ECR" (7,8)

knięcia odpowiednich zaworów. W silnikach wielocylindrowych
wystarcza przeprowadzenie kontroli GMP w pierwszym cylindrze.
W tym celu w silnikach bezwodzikowych należy:
- wymontować wtryskiwacz lub zawór - jeżeli jest zabudowany w
„koszu" po to, by mieć dostęp do denka tłoka;
- przygotować odpowiednio długą listwę, którą w czasie pomiaru
opiera się i przytrzymuje na denku tłoka lub przygotować
specjalny przyrząd z czujnikiem zegarkowym.
Wiadomo, że w układzie tłokowo-korbowym są luzy w łożyskach.
Istnieje zatem przy GMP pewna strefa obojętna (tłok stoi w miejscu, a
korbą można poruszać). Przy pomiarach luzy należy „wybierać"
obracając korbą ku GMP raz z jednej, raz z drugiej strony. Na rys.2
przedstawiono schemat ilustrujący prosty sposób przeprowadzenia
kontroli GMP.
Po ustawieniu listwy na denku tłoka obraca się wałem korbowym np.
w lewo i zatrzymuje następnie wykorbienie przed GMP przy dowolnym
kącie a w przedziale 25-30°0WK. W tym położeniu wału należy
wykonać dwa znaki, jeden na kole zamachowym (1) naprzeciw wskaź-
nika i drugi na listwie naprzeciw stałego dowolnego punktu odniesienia
na głowicy (P). Następnie obracamy wałem korbowym w tym samym
kierunku tak długo, aż znak na listwie przesunie się poniżej poprzedniego
położenia. Wówczas należy zmienić kierunek ruchu wału korbowego i
przesuwać tłok ponownie ku górze wybierając luzy z drugiej strony tak
długo, aż znak na listwie będzie dokładnie w tym samym położeniu co
uprzednio. Wówczas należy zrobić drugi znak (2) na kole zamachowym
naprzeciw wskaźnika. Przy obrocie wałem raz z jednej , raz z drugiej
strony, zostały „wybrane" luzy, a tłok był ustawiony każdorazowo przy
wykonywaniu znaków 1 i 2 na kole zamachowym - dokładnie na tej
samej wysokości - w związku z tym oznaczone wartości kątów wzglę-
dem GMP muszą być takie same i GMP na kole zamachowym spraw-
dzanego tłoka, przy prawidłowym usytuowaniu wskaźnika, musi leżeć
w środku m iędzy wykonanym i znakam i. Jeżeli jest przesunięty to należy
przestawić wskaźnik we właściwym kierunku o połowę różnicy odcinka
zawartego między oznaczonym GMP, a środkiem leżącym między
znakami 1 i 2. Po wykonaniu korekty położenia wskaźnika pomiar GMP
należy powtórzyć.
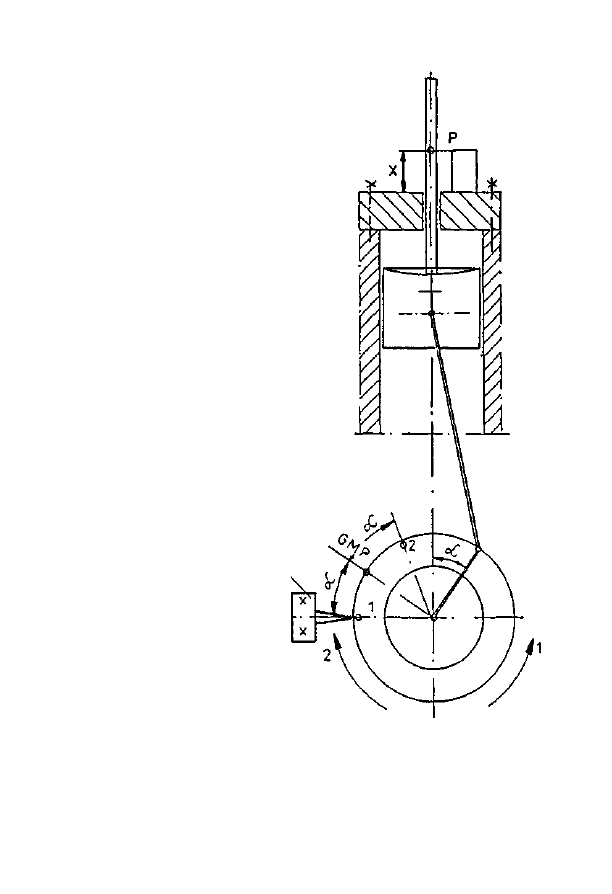
wskaźnik
Rys 2. Schemat ilustrujący sposób kontroli GMP
12
Kontrola i wyznaczanie luzów zaworowych
W czasie pracy silnika wszystkie jego części nagrzewają się i
wydłużają, a więc również elementy układu rozrządu. Luzy zaworowe
stosuje się zatem po to, by zapewnić szczelne i pewne przyleganie
zaworów do gniazda i szybkie jego wypalenie. Nadmierny natomiast luz
będzie powodem dynamicznych uderzeń w układzie rozrządu i przyśpie-
szonego zużycia części, ponadto zostaną skrócone czasy otwarcia i
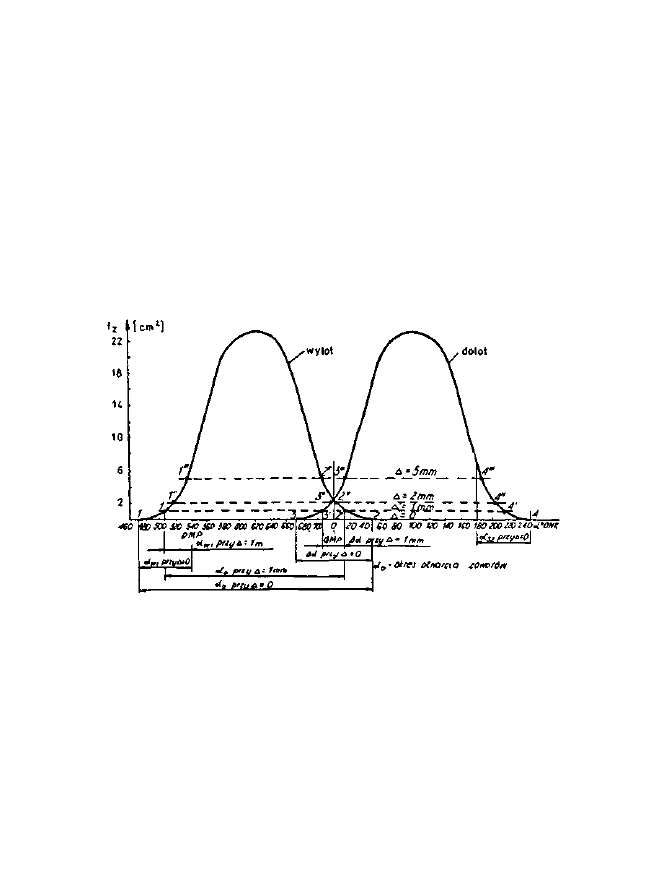
zamknięcia zaworów. Na rys.3 przedstawiono wykresy „czasoprze-
krojów" zaworów z oznaczeniem wpływu luzu zaworowego na ich
powierzchnie i wartości kątów faz rozrządu (9).
Rys 3 Wykresy „ czasoprzekrojów" zaworów z oznaczeniem wpływu luzów
zaworowych na ich wartości (9)
Jak wynika z rys.3 luz zaworowy ma wpływ na wartość kątów
otwierania i zamykania odpowiednich zaworów. Z tego powodu dla
ustalenia jednakowych warunków przepłukania cylindrów konieczne
jest, przed ustawieniem kątów faz rozrządu, wyznaczenie jednakowych
wartości luzów zaworowych przy wszystkich cylindrach.
Dla każdego typu silnika producent ustala luzy o odpowiedniej
wartości. Kontrolę luzów przeprowadza się szczelinomierzem przy
„zimnym" silniku, natomiast w czasie jego pracy ustawione luzy
zmniejszają się orientacyjnie o połowę.
W zasadzie luzy stosowane przy zaworach wylotowych są nieco
większe niż przy zaworach dolotowych.
Ostateczną wartość luzu ustala producent doświadczalnie i podaje w
DTR. Regulacja luzu zaworowego polega na ustawieniu odpowiedniej
szczeliny między popychaczem, a trzonkiem zaworu lub między kołem
podstawowym krzywki zamocowanej na wale rozrządu, a talerzykiem
zaworu w przypadku, gdy wał krzywkowy osadzono w łożyskach na
głowicy nad zaworami (rozrząd bezpośredni). W tym ostatnim jednak
przypadku wartości przewidzianych luzów są znacznie większe (zwykle
dla silników typu 12CzN18/20, M401A; Wola 150 1.0-2.35 mm).
Tak duże luzy są przewidziane nie z powodu wydłużeń cieplnych
trzonków zaworów, a ze względu na warunki kinematycznej współpracy
krzywek o profilach harmonicznych z talerzykami zaworów (9). W
pewnych konstrukcjach układów rozrządu stosują producenci specjalne
spychacze hydrauliczne umieszczone w zakończeniach dźwigen zawo-
rowych. Na rys.4 przedstawiono przekrój przez hydrauliczny popychacz
stosowany do silników 2-suwowych typu 40DM (9).
Rys.4. Przekrój przez hydrauliczny popychacz silnika 2-suwowego typu
40DM (9)
Popychacze hydrauliczne kompensują luzy zaworowe przez co praca
dźwigien jest mniej hałaśliwa i trwałość układu rozrządu zwiększa się.
W tym silniku przewidziano hydrauliczny popychacz do każdego zaworu
- utrzymuje on samoczynnie wymaganą wartość luzu zaworowego.
Popychacz hydrauliczny składa się z obudowy 1, cylinderka 2,
spężyny 3, tulejki z zaworem kulkowym 4 (patrz rys.4). Do hydraulicz-
nego popychacza w czasie, gdy zawór jest zamknięty z układu smaro-
wego łożysk wału przez odpowiednie kanały przepływa pod ciśnieniem
olej smarowy. W chwili otwarcia zaworu ciśnienie oleju w przestrzeni
(a) gwałtownie zwiększa się i kulka zamyka odpływ oleju. Nacisk
dźwigni na zawór jest więc przekazywany przez poduszkę olejową, przez
co uderzenia zostają kompensowane.
W silnikach, które mają np. po dwa zawory wylotowe do jednego
cylindra, należy bardzo dokładnie wyznaczyć jednakowe dla nich
wartości luzów zaworowych. W tym celu do ich regulacji stosuje się
zwykle czujniki zegarkowe. Luz zaworowy przy stosowaniu popychaczy
hydraulicznych ustawia się na „zimno" po dokładnym usunięciu z nich
oleju smarowego. W przypadku silników 40DM przewidziano wartości
luzu dla zaworów wylotowych około 1.0 mm. W tabeli 1 zestawiono
przeciętne wartości luzów zaworowych stosowanych do silników
okrętowych (3, 6).
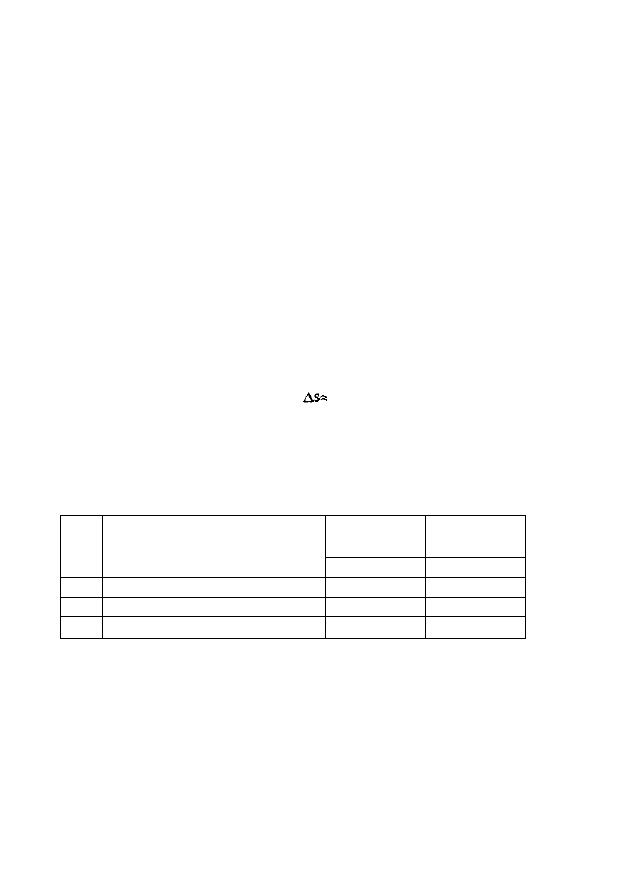
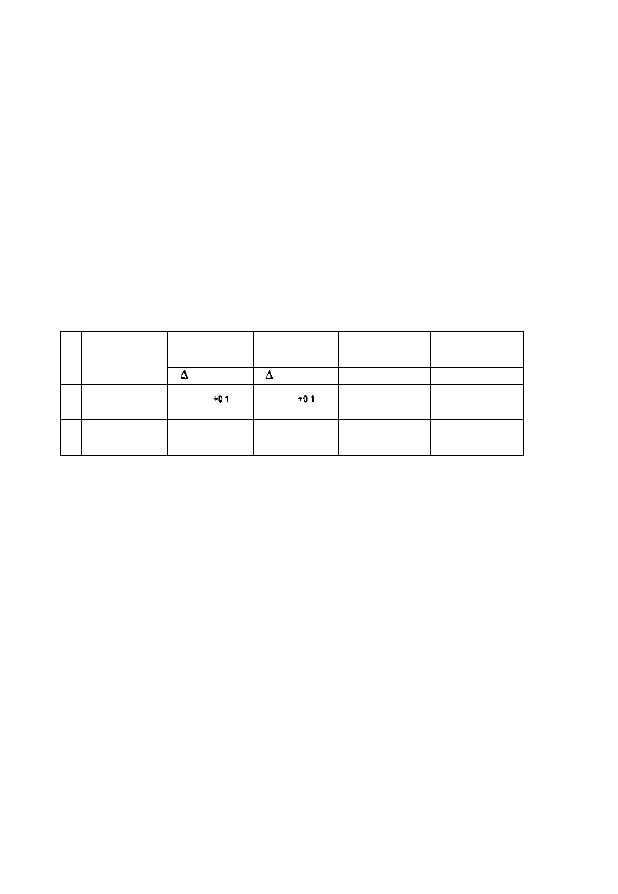
Tabela 1
Zestawienie wartości luzów zaworowych (rozrząd typu pośredniego) (3, 6)
Lp.
1
2
3
Typ silnika
Silniki szybkoobrotowe
Silniki średnioobrotowe
Silniki wolnoobrotowe
Luz zaworów
dolotowych
A s (mm)
0,20
0,40
1,00
Luz zaworów
wylotowych
A s (mm)
0,25
0,60
1,20
Kontrola i ustawianie faz rozrządu
Prawidłowe ustawienie rozrządu ma decydujące znaczenie przy
przepłukiwaniu cylindrów.
Jak wiadomo, zawory powinny otwierać się z takim wyprzedzeniem
kątowym względem zwrotnych położeń tłoka, ażeby np. w chwili
rozpoczęcia suwu napełniania oraz wymuszonego wylotu spalin,
przekroje przelotowe odpowiednich zaworów były największe tzn.
zawory w punktach zwrotnych tłoków powinny być już całkowicie
otwarte.
Kąty odpowiadające zamknięciom zaworów ze zwrotnymi punktami
tłoków są zdeterminowane profilami krzywek.
Opóźnienie zamknięcia zaworów dolotowych ma na celu maksy-
malne wykorzystanie energii kinetycznej mas powietrza w przewodzie
dolotowym warunkującej inżektorowy efekt ładowania cylindrów.
Zawory dolotowe powinny zamknąć się w punkcie, gdy energia kinetycz-
na strumienia dolatującego powietrza zrówna się z energią potencjalną
sprężonego już w cylindrze ładunku. Naturalnie kąty faz rozrządu są
zawsze ustawione przy nominalnej prędkości obrotowej wału.
Zawór wylotowy powinien zamknąć się za GMP z takim założeniem,
ażeby do maksimum wykorzystać efekt eżektorowy - wysysający
uchodzące z cylindra spaliny.
Wraz ze zwiększaniem prędkości obrotowej wałów silników czas
przeznaczony na przepłukanie cylindrów w skali kątowej zmniejsza się.
W związku z tym dla tych silników przewiduje się większe kąty
wyprzedzenia otwarcia zaworów i również późniejsze ich zamknięcia.
Właściwe ustawienie faz rozrządu wpływa na wartości współ-
czynników napełnienia cylindrów oraz pozostałych spalin .
Jak już wspomniano zawory muszą bardzo dokładnie przylegać do
gniazd. Utrata szczelności komory spalania może bowiem spowodować
deformacje w przebiegu procesów spalania i prawie natychmiastowe
wypalenie grzybków zaworów.
W nowoczesnych silnikach, zasilanych olejem opałowym, stosuje się
urządzenia pozwalające na obrót zaworów przy ich zamykaniu przez co
zostają roztarte na przylgniach osiadłe tam twardsze, nie spalone
cząsteczki paliwa. Przez takie rozwiązania uzyskuje się znaczące
zwiększenie niezawodności i trwałości zaworów.
W czasie eksploatacji zwiększa się zużycie następujących elementów
układu rozrządu: krzywek, łożysk wału rozrządu, talerzyków popy-
chaczy, lasek, dźwigien i zaworów. W związku z tym ulegają zmianie
kąty faz rozrządu i wzniosy zaworów. Należy zatem okresowo prze-
prowadzać kontrole wartości kątów faz rozrządu i w razie potrzeby
wprowadzać odpowiednie korekty.
Fazy rozrządu mogą zmieniać się w wyniku:
- zmian wartości luzów zaworowych spowodowanych zużyciem
elementów rozrządu lub zmianami regulacji;
- zmian profilu krzywek spowodowanych ich zużyciem;
- zużycia zębów przekładni napędu wału rozrządu;
- nieprawidłowego montażu układu rozrządu podczas
przeprowadzanych napraw;
- skręcanie plastycznego wału rozrządu lub przemieszczanie
krzywek.
W tabeli 2 zestawiono przykładowo wartości kątów otwarcia i
zamknięcia zaworów, które są podawane zwykle w DTR (4, 5).
Tabela 2
Parametry regulacyjne układów rozrządu typowych silników (4, 5)
Lp.
1
2
Oznaczenie
silnika
Sulzer
typ 6ZA40/48
Sulzer
typ 6A25/30
Luz zaworów
dolotowych
s (mm)
0,7
0,4
Luz zaworów
wylotowych
s (mm)
1,2
0,4
Zwór
dolotowy
0
OWK
56°przed GMP
16°zaDMP
65°przed GMP
37°za DMP
Zwór
wylotowy
°OWK
36°przed DMP
34°za GMP
45°przed DMP
53°za GMP
Fazy rozrządu można sprawdzić wówczas, gdy znane są wartości
kątów otwarcia i zamknięcia zaworów; są one podane w DTR każdego
silnika, ponadto są dokładnie oznaczone na wieńcu koła zamachowego.
Przy regulacji faz rozrządu należy zawsze określić właściwy kierunek
obrotu wału korbowego - co można sprawdzić obracając go powoli i
obserwując ruch zaworów na jednym z cylindrów. Jeżeli po zamknięciu
zaworu dolotowego zawór wylotowy nie otwiera się zaraz, lecz dopiero
po dwóch suwach, to wybrany kierunek obrotów jest prawidłowy.
Moment początku otwierania się dowolnego zaworu następuje w
chwili styku krzywki z rolką popychacza lub dźwigni zaworowej z
trzonkiem zaworu, co można stwierdzić po zakleszczeniu się podłożonej
blaszki „papierkowej". W takim momencie należy odczytać na podziałce
koła zamachowego wyprzedzenie otwarcia danego zaworu.
Uzyskane z pomiarów wartości porównuje się z danymi z DTR. W
przypadku zaistnienia różnic dla wszystkich jednoimiennych zaworów
należy obliczyć średnią wartość arytmetyczną różnic kątów ich otwarcia
i przeprowadzić regulację przez odpowiednie obrócenie wału rozrządu.
Prawidłowość faz rozrządu zależy od poprawności montażu ele-
mentów układu napędzającego wał krzywkowy. Zwykle na współ-
pracujących ze sobą kołach zębatych są wykonane znaki. Na rys.5
przedstawiono schemat oznaczania i sposób łączenia współpracujących
ze sobą kół zębatych (5).
Po założeniu kół zębatych zgodnie z punktowymi oznaczeniami
wskazane jest obrócenie wału korbowego dla sprawdzenia czy koła
zębate współpracują bez zacięć.
W pewnych konstrukcjach silników np. Sulzera typ A25/30 zarys
krzywek jest stosunkowo płaski. Z tego powodu przy regulacji faz
rozrządu producent zaleca, aby wstępnie ustawić znacznie większe luzy
zaworowe - w tym silniku 2.07 mm. Przy takich luzach odczytane
wartości kątów faz rozrządu będą bardziej dokładne i powinny wynosić
dla zaworów:
- dolotowego - otwarcie 41° przed GMP; zamknięcie 13°zaDMP
- wylotowego - otwarcie 25° przed DMP; zamknięcie 29°za GMP.
Tolerancja różnic kątów nie powinna być większa niż ±2°0WK (4).
Po przeprowadzeniu regulacji faz rozrządu w powyższy sposób
należy ponownie ustawić luzy zaworowe o wartościach wymaganych w
czasie pracy, a więc 0.4 mm (4), a wówczas rzeczywiste wartości
kątów otwarcia zaworów będą zgodne z danymi podanymi w instrukcji.
W przypadku bezpośredniego układu napędu zaworów (wały roz-
rządu są montowane bezpośrednio nad zaworami), regulację faz rozrządu
przeprowadza się ustawiając odpowiednio wał względem stożkowego
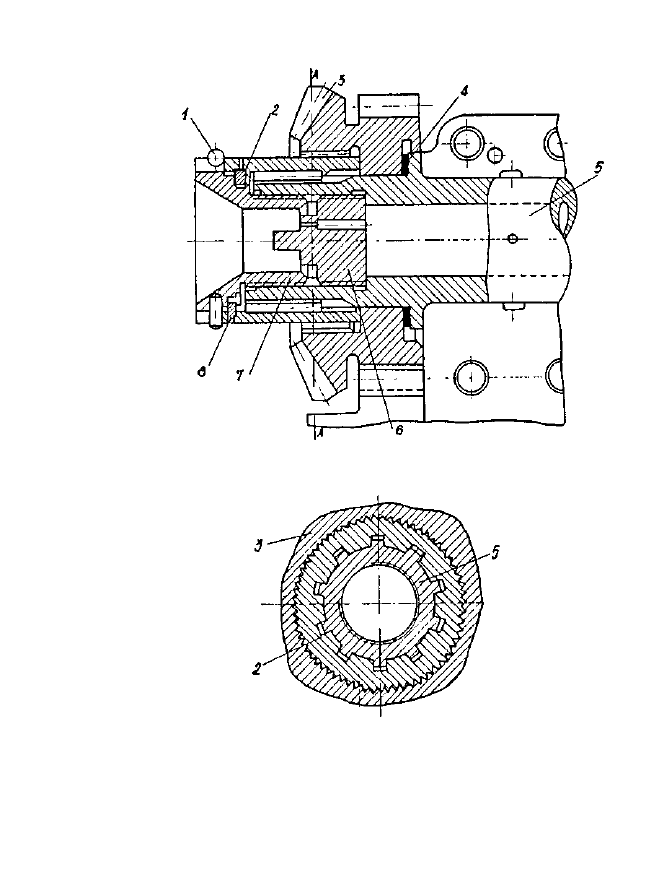
koła napędowego. Na rys.6 przedstawiono układ połączeń wału rozrządu
z zębatym kołem napędowym (9).
W instrukcji silników są zamieszczone tabele, które podają liczbę
wpustów prostokątnych, o jaką należy obrócić tuleję regulacyjną w
stosunku do wału rozrządu i odpowiadającą im wartość kątową obrotu
wału korbowego, o którą można zmienić początek otwarcia zaworu.
Kontrola i ustawienie rzeczywistego kąta
wyprzedzenia wtrysku paliwa
Jak wiadomo każdy silnik jest przez producenta optymalnie regulo-
wany przy znamionowych parametrach pracy. Dla tych parametrów
ustala producent wartość rzeczywistego kąta wyprzedzania wtrysku
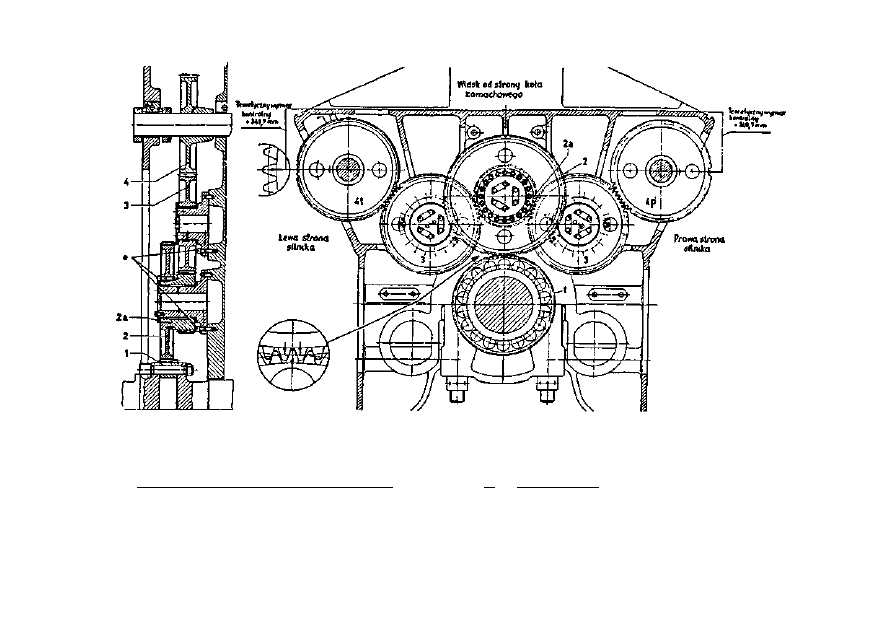
1 Koło napędowe 2a Środkowe małe koło 4
l
. Lewe koło wału rozrządu p = moment dokręcenia patrz
2 Środkowe duże koło pośrednie
4
p
Prawe koło wału rozrządu poz. 24 tabeli 0350
pośrednie 3 Koło pośrednie .
Położenie kół zębatych jest identyczne dla silników nawrotnych 1 nlenawrotnych.I
Rys.5. Schemat ilustrujący oznaczenia mających ze sobą współpracować kół zębatych rozrządu silnika Sulzer typ ZV40/48 (5)
A - A
Rys.6. Schemat mechanizmu regulacji faz rozrządu silnika typu Wola DM (9)
1-pierścień zabezpieczający; 2-tuleja regulacyjna; 3-koło zębate wału
rozrządu; 4-podkładka regulująca luz m iędzyzębny; 5-wał rozrządu;
6-korek z dyszą; 7-zabezpieczenie; 8-pierścień sprężysty (9)
paliwa z takim założeniem, aby maksymalne ciśnienia spalania wystę-
powały orientacyjnie 5 10°OWK za GMP.
Rzeczywisty kąt wyprzedzenia wtrysku paliwa jest mierzony od
wlotu pierwszych kropel paliwa do komory spalania do GMP. Wartość
tego kąta zależy od opóźnienia samozapłonu paliwa. Czas niezbędny do
powstania w cylindrze płomienia jest wartością prawie stałą dla danego
silnika. Z tego powodu przyjmuje się przeciętnie dla silników szybko-
obrotowych wartości kątów 25 30°OWK; dla silników średnio-
obrotowych 12 20°OWK, natomiast do silników wolnoobrotowych
6 12°0WK.
W DTR każdego silnika producent określa dokładnie wartość kąta
oraz sposób jego kontroli i regulacji. W praktyce, przy wstępnym
wyznaczaniu tego kąta, można posłużyć się tzw. „momentoskopem".
Stosuje się go do silników pracujących na oleju napędowym. Na rys.7
przedstawiono schemat „momentoskopu".
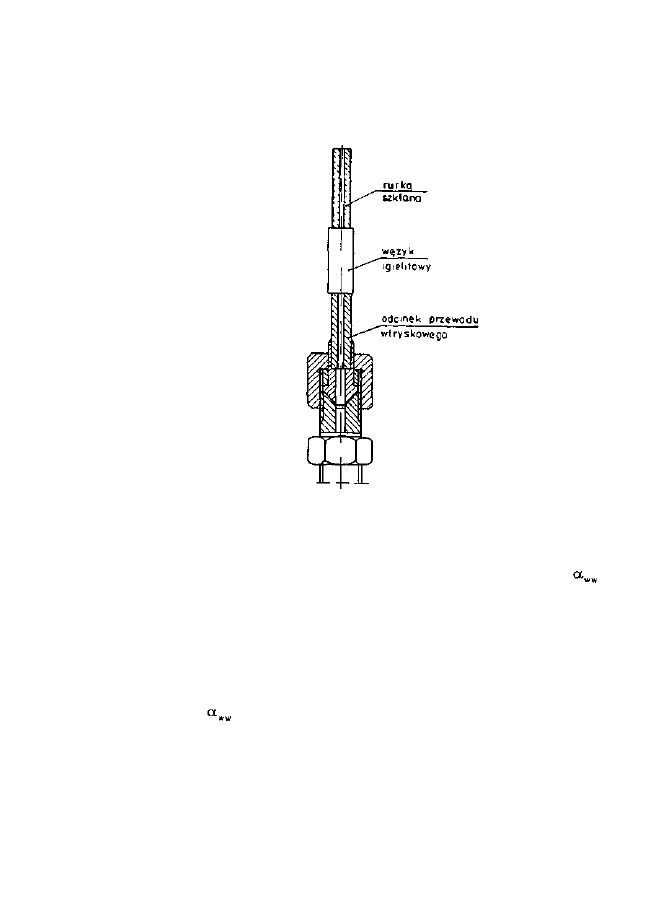
„Momentoskop" można wykonać na statku. W tym celu należy odciąć
z jednej strony końcówkę np. uszkodzonego przewodu wtryskowego i
podłączyć do niego za pomocą wężyka igelitowego (gumowego) rurkę
szklaną o możliwie małym otworze. Po odłączeniu przewodu od pompy
wtryskowej przykręca się w to miejsce „momentoskop". Następnie
przesuwa się listwę sterującą dawkowaniem pompy na maksymalny
wydatek i podpompowuje paliwo tak, by cała sekcja tłocząca była
dokładnie wypełniona i by słupek paliwa był widoczny w szklanej rurce
„momentoskopu". Obracając bardzo wolno wałem korbowym należy,
w chwili drgnięcia paliwa w rurce, dać sygnał „top" i w tym momencie
obserwator przy kole zamachowym powinien odczytać na skali przy-
padającą przed GMP wartość kąta. Formalnie ta odczytana wartość
odpowiada geometrycznemu kątowi wyprzedzania wtrysku paliwa,
wiadomo bowiem, że w rzeczywistych warunkach pracy silnika przewód
wtryskowy jest połączony z wtryskiwaczem. Iglica wtryskiwacza jest
wstępnie napięta sprężyną i początek wtrysku następuje nieco później.
Czas odpowiadający zwłoce we wtrysku jest bardzo mały, szczególnie
tam, gdzie przewody wtryskowe są krótkie i o małej pojemności. Z tego
powodu, uwzględniając bezwładność reakcji pomiarowców, można z
dużym prawdopodobieństwem przyjąć, że wartość odczytanego kąta
będzie odpowiadać „rzeczywistemu" kątowi wyprzedzenia wtrysku.
Takie pomiary można wykonać np. po wymianie pompy wtryskowej lub
po remoncie kapitalnym silnika.
Rys 7 Schemat „momentoskopu
Mimo, że opisana metoda orientacyjnego ustawiania kąta jest
mało dokładna, to jednak dzięki łatwości przeprowadzania prób jest
często w praktyce stosowana. Dokładne ustalenie wartości rzeczywistych
kątów wyprzedzenia wtrysku paliwa przeprowadza się podczas regulacji
obciążeniowej poszczególnych cylindrów. Należy zaznaczyć, że zużycie
par precyzyjnych układu wtryskowego silnika nie jest jednakowe i z tego
powodu przy dobrze wyregulowanym obciążeniowo silniku wartości
kątów w poszczególnych sekcjach tłoczących nie muszą być
identyczne.
W przypadku pracy silnika na oleju opałowym można by się posłużyć
„momentoskopem" tylko po wypełnieniu pomp wtryskowych olejem
napędowym. W nowoczesnych, zintegrowanych układach paliwowych
jest to często niemożliwe. Z tego powodu wyznaczanie kątów jest
przeprowadzane w inny sposób, przy zastosowaniu zwykle czujników
zegarkowych. Dokładne czynności podawane są przez producentów w
DTR każdego silnika.
Sposób regulacji kąta wyprzedzenia wtrysku jest zależny od rodzaju
pompy i jej konstrukcji. Na przykład regulację pomp wtryskowych z
pokrętnym tłoczkiem stosowanych do silników Sulzera typ Z przepro-
wadza się przy zastosowaniu specjalnego pneumatycznego urządzenia
przewidzianego w wyposażeniu silnika (5).
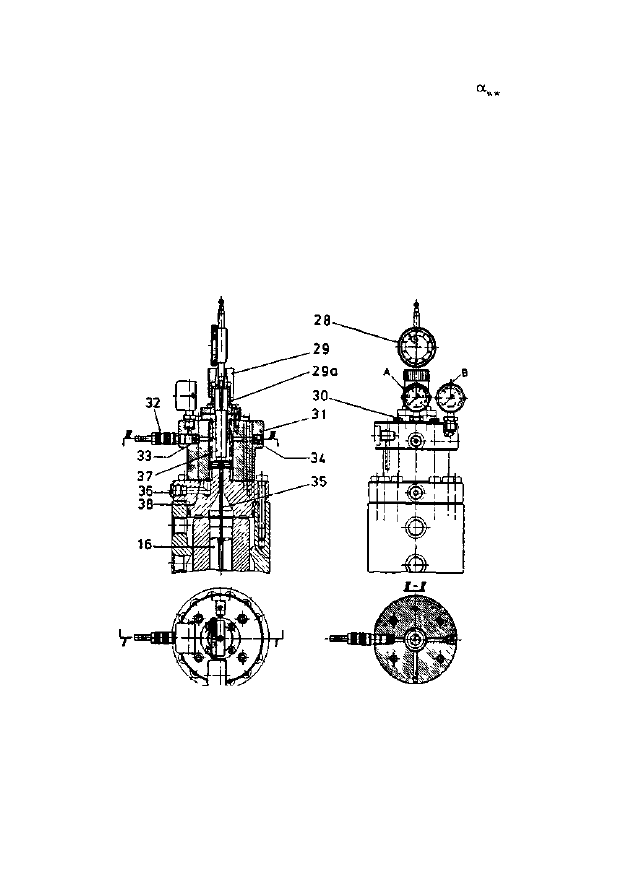
Rys. 8. Schemat urządzenia do regulacji pomp wtryskowych silników Sulzer
typ ,,Z,, (3)
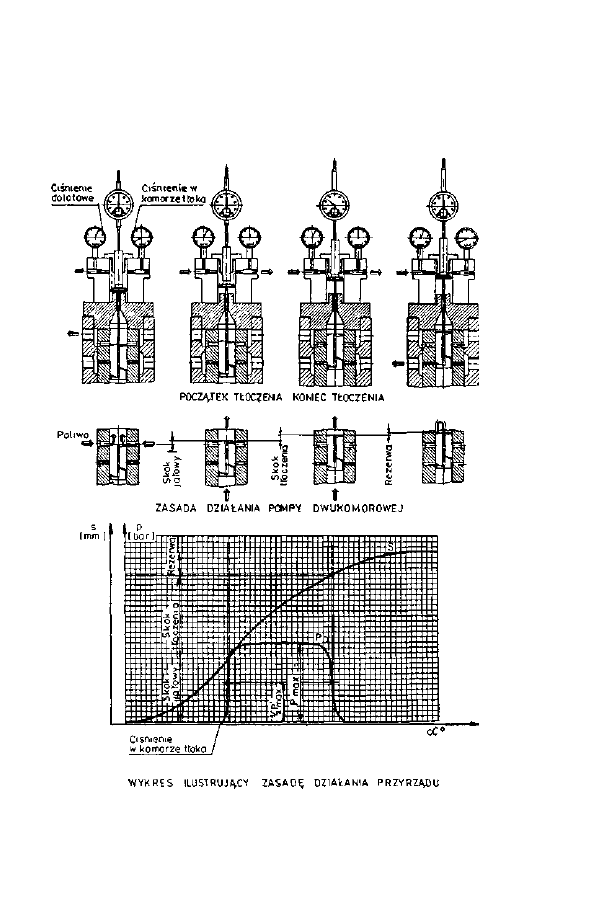
Na rys.8 przedstawiono schemat urządzenia do regulacji początku
tłoczenia pomp wtryskowych stosowanego do silników Sulzera typu Z
(5), a na rys.9 schematy ilustrujące zasadę działania przyrządu.
Przy kontroli lub regulacji kąta w tym przypadku należy:
- zakręcić zawory odcinające paliwo na dopływie i przelewie;
- wykręcić korek odpowietrzający, odłączyć przewód przecieków
paliwa i w jego miejsce wkręcić korek 36 urządzenia
nastawczego (rys.8);
- zdemontować przewód wtryskowy wraz z jego osłoną;
- ustawić wał korbowy w takim położeniu, aby rolka popychacza
pompy opierała się na kole podstawowym krzywki;
- zamontować przyrząd pomiarowy 3 1 i przykręcić go za pomocą
czterech śrub do pompy;
- trzpień czujnika zegarkowego 35 oprzeć o czoło tłoczka pompy;
- odłączyć regulator prędkości obrotowej od pompy, listwę
wskaźnika obciążenia ustawić w położenie „8.5" i zablokować;
- podłączyć przewód sprężonego powietrza o ciśnieniu 6-9 bar do
przyrządu;
- obracać wolno wałem korbowym w kierunku „naprzód",
obserwując wskazania manometru „B" i odnotowując największą
wartość ciśnienia; w tym położeniu tłoczek zakrywa otwory
dopływu i przelewu paliwa (suw tłoczenia) i ciśnienie powietrza
utrzymuje się podczas obracania wału;
- z kolei należy obrócić wałem korbowym w kierunku odwrotnym
tak, aby rolka popychacza znalazła się ponownie na kole
podstawowym krzywki;
- czujnik zegarkowy 28 należy ustawić w położeniu zerowym ze
wstępnym napięciem 1 mm;
- sprawdzić w protokóle regulacji wartość jałowego skoku tłoczka
i następnie wolno obracać wałem korbowym w kierunku naprzód
do czasu, gdy wskazówka „B" osiągnie wartość równą połowie
maksymalnego ciśnienia powietrza odczytanego poprzednio na
tym manometrze; to położenie odpowiada jak wykazały
doświadczenia początkowi podawania paliwa (5) - w tej pozycji
kąt należy odczytać na skali koła zamachowego;
USTAWIANIE POMPY
ZASADA DZIAŁANIA PRZYRZĄDU DO USTAWIANIA
Rys.9. Schematy ilustrujące zasadę działania przyrządu (5)
OWK

- odczytane z czujnika zegarkowego przesunięcie tłoczka należy
dodać do wartości skoku tłoczenia paliwa podanego w protokóle
regulacji i odnotować otrzymany wynik;
- obracać dalej wałem korbowym do czasu, aż zliczona wartość
ukaże się na czujniku;
- za pomocą dwóch śrub regulacyjnych widełek trzonu sprężystego
należy przesunąć listwę paliwową w położenie, w którym
ciśnienie na manometrze „B" będzie ponownie równe połowie
ustalonej uprzednio wartości maksymalnej;
- ustalić śruby regulacyjne za pomocą przeciwnakrętek i je
zabezpieczyć;
- powtórzyć ponownie kontrolę regulacji, przy czym wartość
odczytów na czujniku (w chwili osiągnięcia połowy ciśnienia
maksymalnego powietrza) powinna być zgodna ze skokiem
tłoczenia, podanym w protokóle regulacji z tolerancją ±0.02 mm;
- zdemontować przyrząd ustawczy z pompy, podłączyć przewody i
otworzyć zawory odcinające;
- odblokować wskaźnik obciążenia i połączyć cięgło spężyste
układu dźwigni z regulatorem.
Pompy wtryskowe z tłoczkami o dwóch krawędziach sterujących
reguluje się podobnie.
Poszczególne fazy regulacji są kolejno i szczegółowo podane w
każdej DTR.
Kąt wyprzedzenia wtrysku paliwa w pompach z zaworami przeloto-
wymi reguluje się przy zastosowaniu czujnika zegarkowego. Na rys. 10
przedstawiono przekrój wzdłużny przez pompę wtryskową z zaworami
przelotowymi silnika Sulzera typ RLB, a na rys.1 1 przekrój poprzeczny
tej pompy (16)
Na rys. 12 przedstawiono przekrój przez głowicę pompy wtryskowej
z uwidocznionymi zaworami początku i końca wtrysku paliwa (16)
Na rys. 12 uwidoczniono szczegółowo przekroje zaworów i możli-
wość pomiaru ich skoku za pomocą czujnika zegarkowego. Na rys.13
przedstawiono schematy pompy wtryskowej z zaworami przelotowymi
z uwidocznionymi położeniami zaworów w czasie ich regulacji oraz
wykres możliwości regulowania dawek paliwa w różnych sytuacjach
eksploatacyjnych (16)
Rys.10. Przekrój wzdłużny przez pompą wtryskową z zaworami przelotowymi
silnika Sulzer typ RLB (16)
Rys 11 Przekrói poprzeczny przez pompą wtryskową z zaworami
przelotowymi silnika Sulzer typ RLB (16)
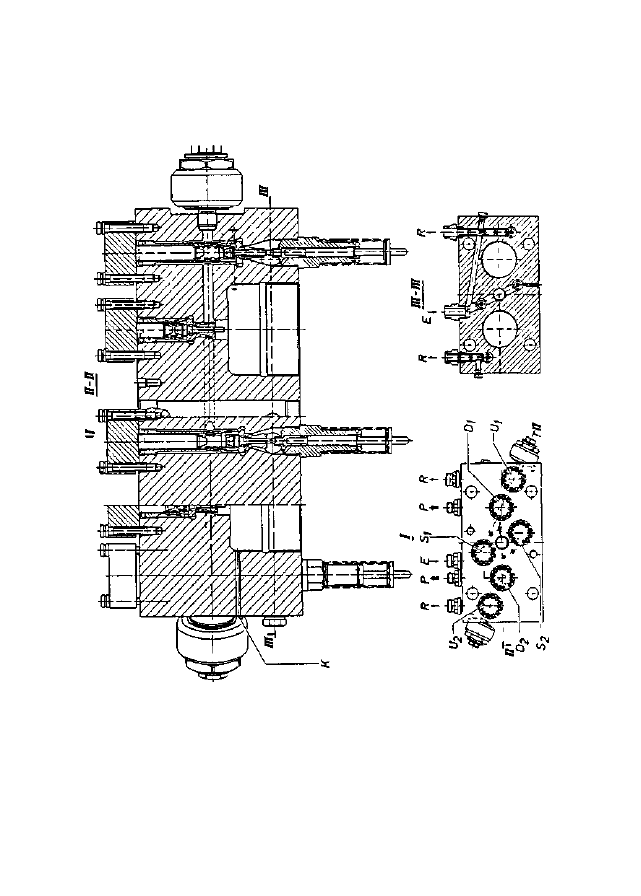
Rys. 12. Przekrój przez głowicę pompy wtryskowej silnika Suizer typ RLB (16)
Koniec wtrysku
przy obciążeniach
Początek wtrysku
przy obciążeniach
GMP
Rys.13. Schematy pompy wtryskowej z zaworami przelotowymi w czasie
kolejnych faz regulacji (16)
Faza 1 - rolka popychacza jest na kole podstawowym krzywki - początek
ruchu tłoczka;
Faza II - uwidacznia położenie tłoczka po skoku jałowym;
Faza III - przedstawia położenie tłoczka po skoku użytecznym
Wartości przesunięć zaworów przelotowych w poszczególnych
fazach są ściśle określone w DTR danego silnika i mierzy się je
czujnikiem zegarkowym (16).
Regulację równomierności dawkowania poszczególnych sekcji
tłoczących pomp przeprowadza się na specjalnych stanowiskach
pomiarowych u producentów lub w wyspecjalizowanych zakładach
naprawczych. Na statku zmiany dawkowania paliwa poszczególnych
pomp wtryskowych przeprowadza się podczas regulacji dynamicznej
(obciążeniowej) poszczególnych cylindrów.
Kontrola i ustawienie wstępnego napięcia iglic
wtryskiwaczy
Prawidłowe działanie wtryskiwaczy warunkuje właściwy przebieg
procesów spalania i bezpieczną oraz ekonomiczną pracę silnika.
Producenci określają okresy pracy wtryskiwaczy, po których w
ramach prac planowo-zapobiegawczych należy sprawdzić ich stan
techniczny, przeprowadzić naprawę i regulację.
Zwykle okresy między kolejnymi wymianami wynoszą około 500
godzin pracy dla wtryskiwaczy silników średnioobrotowych i do 1000
godzin pracy dla wolnoobrotowych (10). Zalecane przedziały czasu
pracy są podane w DTR. W przypadku zauważenia jednak objawów
nieprawidłowego przebiegu procesów spalania (nadmierne dymienie,
wyższa temperatura spalin wylotowych z cylindra), należy sprawdzić czy
nie została zatarta i podwieszona iglica jednego z wtryskiwaczy.
W miarę upływu czasu zmniejsza się napięcie sprężyny dociskającej
iglicę do gniazda dyszy - wpływ relaksacji drutu „fortepianowego" i
zużycia gniazd iglicy, co powoduje zmniejszenie początkowego ciśnienia
wtrysku paliwa i deformacje przebiegu procesów spalania. W takich
przypadkach wydłuża się zwykle okres opóźnienia samozapłonu paliwa.
Wiadomo, że producenci ustalajądla każdego silnika optymalne wartości
ciśnienia początku wtrysku paliwa, które decydują o dyspersji kropel
wtryskiwanej strugi (13) i zwykle ciśnienia te są w przedziale od
180 350 bar.
Na podstawie wielu badań (13) stwierdzono, że wartości począt-
kowego ciśnienia wtrysku paliwa mają duży wpływ na okres opóźnienia
jego samozapłonu, a mianowicie wraz z nadmiernym wzrostem początku
ciśnienia paliwa zwiększa się jednorodność kropel, maleje ich średnica
i okres samozapłonu staje się dłuższy, a w spalinach występuje dużo
sadzy (13). Jednorodna mieszanina w pierwszej fazie procesu spalania,
jak to wielokrotnie w Zakładach MAN stwierdzili Meurer, Muhlberg,
Buschmann (13), nie stwarza optymalnych warunków dla powstawania
samozapłonu.
Kontrolę wstępnego napięcia iglicy wtryskiwacza przeprowadza się
na stanowisku prób, które jest dostarczane do każdego silnika. Składa
się ono z pompy wtryskowej, manometru kontrolnego, zbiornika paliwa,
zbiornika ściekowego, przy którym jest obudowa umożliwiająca
zamocowanie sprawdzanego wtryskiwacza. Po odpowietrzeniu urzą-
dzenia paliwo pompuje się dźwignią ręczną przez wtryskiwacz z
częstotliwością 15 20 razy na minutę, sprawdzając na manometrze
wartość ciśnienia przy podnoszeniu się iglicy oraz ponadto szczelność
wtryskiwacza, jakość i równomierność rozłożenia, i kształt strumieni.
Iglica musi zawsze szczelnie przylegać do gniazda dyszy, co można
stwierdzić przez tzw. suche jej otwarcia i zamknięcia.
W czasie kontroli wstępnego napięcia iglicy wtryskiwacza u wylotu
z dyszy nie mogą tworzyć się krople podciekającego paliwa. Ciśnienia
otwarcia iglic, odczytane na uprzednio wyskalowanym manometrze
kontrolnym, nie mogą różnić się więcej niż ±3% w porównaniu z
wartościami przewidzianymi w DTR dla każdego wtryskiwacza.
Dla zapewnienia jednakowych warunków spalania w poszczególnych
cylindrach należy bardzo dokładnie wyznaczyć jednakowe wartości
początkowych ciśnień wtryskiwanego paliwa.
Sposoby czyszczenia i ewentualnie regeneracja wtryskiwaczy są
podawane szczegółowo w DTR przez producentów.
Na skutek erozyjnego działania strumieni wtryskującego przez
otwory w dyszy pod bardzo dużym ciśnieniem paliwa, otwory te ulegają
zniekształceniu i powiększeniu. Rozpylacze stosowane do silników
zasilanych olejem opałowym powinny być dodatkowo kontrolowane
orientacyjnie po 8 12 miesiącach pracy (10). Średnice otworów
sprawdza się stalowymi kalibrowanymi drucikami o odpowiedniej
średnicy, przy czym zwiększenie średnicy otworów dyszy o 10% jest
dopuszczalną górną wartością zużycia (10).
Bezpośrednio przed zamontowaniem wtryskiwaczy do głowicy,
smaruje się ich zewnętrzne części stykające się z głowicą pastą grafitową,

która przeciwdziała zapiekaniu się wtryskiwacza w gnieździe i ułatwia
następnie jego demontaż. Wtryskiwacz powinien być równomiernie
dociągnięty do głowicy, co ułatwiają pakiety sprężystych podkładek (2,
3). Sposoby dokręcania wtryskiwaczy są opisane w DTR (2, 3).
Kontrola i ustawienie rozdzielaczy powietrza
rozruchowego
Rozdzielacze powietrza są napędzane przez wały rozrządu. Działają
tylko w czasie rozruchu, a po uruchomieniu silnika zostają samoczynnie
wyłączone.
Zadaniem rozdzielaczy jest w odpowiednim czasie sterowanie
otwarciem i zamknięciem zaworów rozruchowych. Zwykle rozdzielacz
powoduje otwarcie zaworu rozruchowego około 5-0° przed GMP i
zamknięcie zaworu 75
o
-100° za GMP w silnikach 2-suwowych i 130-
150° za GMP w 4-suwowych. Podczas kontroli sprawdza się momenty
otwarcia i okresy dolotu powietrza rozruchowego do poszczególnych
cylindrów. Odchyłki momentów otwarcia w stosunku do wartości prze-
widzianych w DTR nie powinny przekraczać ±2°OWK Ponadto oprócz
ogólnej kontroli stanu powierzchni roboczych elementów sterujących
należy sprawdzać wartości luzów pomiędzy rolkami, a krzywkami. Luz
ten powinien wynosić od 0.5 do 1.0 mm i jest konieczny dla prawi-
dłowego wyłączania rozdzielacza z pracy po zakończeniu rozruchu.
Kolejność rozdziału powietrza rozruchowego dostarczanego do zaworów
rozruchowych musi być zgodna z kolejnością zapłonów w cylindrach.
Dynamiczna regulacja silników okrętowych
Dynamiczną regulację przeprowadza się po zamontowaniu nowego
silnika w siłowni, po naprawach kapitalnych lub okresowo dla sprawdze-
nia czy obciążenia poszczególnych cylindrów są jednakowe. Wiadomo,
że w czasie długotrwałej eksploatacji poszczególne części silnika, a
szczególnie pompy wtryskowe i wtryskiwacze zużywają się równo-
miernie i z tego powodu następują znaczące zmiany obciążenia poszcze-
gólnych cylindrów. Jeżeli choć jeden z cylindrów nie będzie rozwijał
przewidzianej mocy, to następne pracujące po nim mogą być trwale
przeciążone, co może doprowadzić do awarii. O obciążeniu cylindrów
informują takie parametry jak maksymalne ciśnienie spalania i tempe-
ratura spalin wylotowych.
W praktyce mogą wystąpić następujące przypadki:
1. Maksymalne ciśnienia spalin (mierzone wykresami słupkowymi
za pomocą indykatora) są za duże i temperatura spalin
wylotowych z tego cylindra jest za wysoka. Przyczyną takiej
sytuacji jest za duża dawka paliwa dostarczana do cylindra.
2. Maksymalne ciśnienia spalin są za duże i temperatura spalin
wylotowych za niska. Przyczyną takiej sytuacji jest za duży
rzeczywisty kąt wyprzedzenia wtrysku paliwa - procesy
spalania są za bardzo przesunięte przed GMP.
3. Maksymalne ciśnienia spalin są za małe i temperatura spalin
wylotowych jest za niska. Przyczyną takiej sytuacji jest za mała
dawka paliwa dostarczana do danego cylindra.
4. Maksymalne ciśnienia spalin w cylindrze są za małe, a
temperatura spalin wylotowych jest za wysoka. Przyczyną takiej
sytuacji jest za mały rzeczywisty kąt wyprzedzenia wtrysku
paliwa i procesy spalania są przesunięte za bardzo - na suw
rozprężania.
5. Ostatni przypadek - wszystkie parametry są w normie i wykresy
indykatorowe są prawidłowe.
Przed pomiarami należy przeprowadzić skalowanie przyrządów.
Wykonane pomiary wstępne informują mechanika o faktycznym
stanie obciążenia cylindrów.
Pomiary wykonuje się zawsze przy stałym obciążeniu silnika
najczęściej odpowiadającym warunkom „ECR".
Regulacja obciążeniowa musi być prawidłowo przygotowana. Przed
pomiarami należy upewnić się o stanie technicznym silnika mierząc
wykresami słupkowymi ciśnienia sprężania w poszczególnych cylin-
drach, które świadczą o szczelności komór spalania. Badania przepro-
wadza się przy obciążeniu „ECR", wyłączając w czasie pomiaru na
krótko paliwo w danym cylindrze.
Dopuszczalne różnice ciśnień sprężania w poszczególnych cylindrach
silników niedoładowanych nie powinny przekraczać ±0.5 bar,
natomiast w silnikach doładowanych ±1.0 bar. Jeżeli wartość
ciśnienia sprężania w badanym cylindrze jest za mała w stosunku do
przewidzianej, to świadczy to o nieszczelności komory spalania lub o
nadmiernych oporach przepływu powietrza do tego cylindra. Zatem
przed przystąpieniem do właściwej regulacji obciążeniowej należy
ustaloną niesprawność usunąć bo regulowanie silnika przy niespeł-
nionych podstawowych warunkach nie ma sensu.
Regulacja obciążeniowa musi być przeprowadzana przy stanie morza
<2°B, jak już wspomniano przy stałym obciążeniu i po uzyskaniu
uprzednio przez silnik tzw. równowagi cieplnej. Przed bezpośrednimi
pomiarami powinien silnik pracować przy danym obciążeniu około
30 60 minut, aby wszystkie jego części podgrzały się do ich stałej
temperatury.
Przy tej regulacji wykonuje się pomiary maksymalnych ciśnień
spalania i temperatury spalin wylotowych w poszczególnych cylindrach.
Wszystkie dane spisuje się w tabelkę, a następnie analizuje ewentualne
różnice parametrów występujące w kolejności zapłonów. Dopuszczalne
różnice parametrów zestawiono w tabeli 3.
Największe temperatury spalin wylotowych występują w cylindrach
usytuowanych w środku silnika z powodu gorszych warunków odpro-
wadzania ciepła przez chłodzącą wodę.
Na podstawie danych doświadczalnych można stwierdzić, że zmiana
kąta wyprzedzenia wtrysku paliwa o 1°OWK spowoduje w
silnikach okrętowych zmianę wartości maksymalnego ciśnienia spalania
(11,15,17):
- w wolnoobrotowych 3 4 bar
- w średnioobrotowych 2 3 bar
- w szybkoobrotowych 1 bar
Tabela 3
Dopuszczalne wartości różnic parametrów regulacyjnych (11)
Lp.
1
2
Typ silników
niedoładowane
doładowane
Różnica
maksymalnych
ciśnień spalania
pmax (bar)
±2,5
±4,0
Różnica
temperatury
spalin wylotowych
CC)
± 12,5
±40-50
Im kąt będzie większy, tym wcześniej rozpocznie się wtrysk
paliwa i tym większe będą wartości ciśnień spalania, a niższe temperatury
spalin wylotowych. Przy mniejszym kącie procesy spalania prze-
mieszczą się bardziej na suw rozprężania i wówczas maksymalne
ciśnienia spalania będą mniejsze, natomiast temperatury spalin wyloto-
wych zwiększą się.
Jeżeli po pomiarach kontrolnych stwierdzi się, że parametry maksy-
malnego ciśnienia i temperatury spalin w poszczególnych cylindrach
znacznie różnią się między sobą, to wówczas należy przeanalizować
wartości zapisanych parametrów w kolejności zapłonów występujących
w cylindrach i ustalić o ile stopni należy przesunąć kąt i w jaką
stronę, by uzyskać różnice parametrów mieszczące się w dopuszczalnych
przedziałach.
Zatem przy regulacji obciążeniowej najpierw należy próbować
wyrównać parametry w cylindrach przez zmianę kąta wyprzedzenia
wtrysku paliwa, a następnie dopiero w razie konieczności zmieniać
dawkę (ilość) podawanego paliwa.
Kontrolę równomiernego obciążenia poszczególnych cylindrów prze-
prowadza się zawsze wówczas, gdy istnieją objawy nierównej ich pracy.
Informacje dotyczące okresowej pracy nie w pełni
sprawnych silników
Należy pamiętać, że powinno się eksploatować silniki zawsze tylko
w pełni sprawne.
W razie konieczności okresowego wyłączenia z pracy jednego
cylindra lub nawet cylindrów, należy obowiązkowo kontrolować ilość
pobieranego przez silnik paliwa. Nie powinno ono być większe niż przy
obciążeniu odpowiadającym parametrom „MCR". Należy dążyć do
utrzymania w pracujących cylindrach średniego ciśnienia użytecznego
p
ex
nie większego od wartości znamionowej. Wartości T
max
, T
sp
oraz
p
max
warunkujące aktualne obciążenia cylindrów nie powinny być większe
od znamionowych. Po wyłączeniu z pracy cylindra zmniejsza się
sprawność mechaniczną silnika, ponieważ na pracujące cylindry -
przypadają opory mechaniczne nie pracującego cylindra zgodnie z
zapisem
gdzie
N (kW) - moc równoważna wszystkim stratom mechanicznym
Ni
x
(kW) - moc silnika po wyłączeniu cylindra (-ów)
Ni
z
(kW) - indykowana znamionowa moc silnika sprawnego
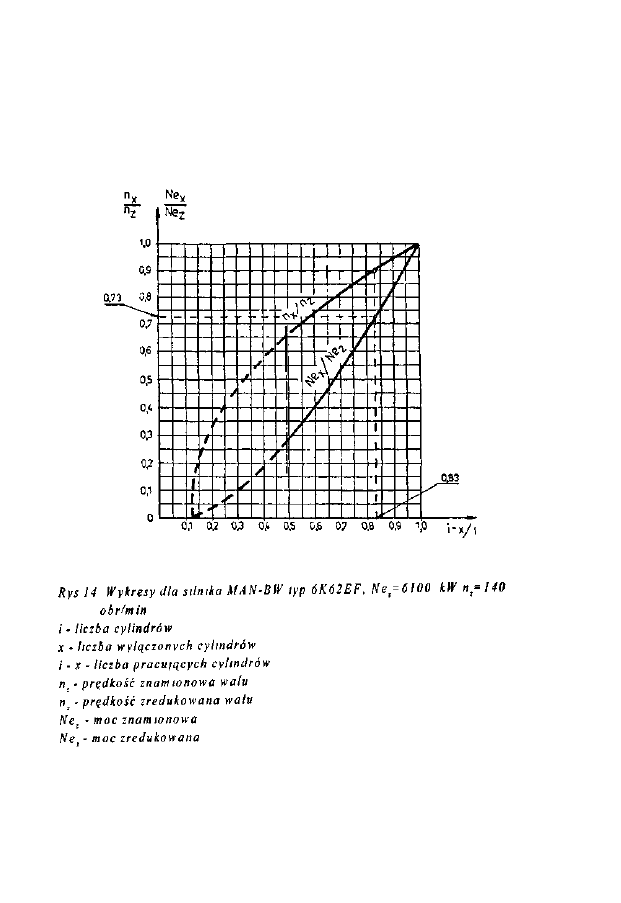
Często w DTR (1) producenci załączają wykresy, które umożliwiają
odczytanie zarówno zredukowanej mocy silnika, jak i zalecanej zredu
kowanej prędkości obrotowej wału. Na rys. 14 przedstawiono wykresy
dotyczące silnika MAN-BW typ 6K62EF umożliwiające odczytanie
zalecanej zredukowanej mocy i prędkości obrotowej w przypadku
wyłączenia z pracy cylindrów (1).
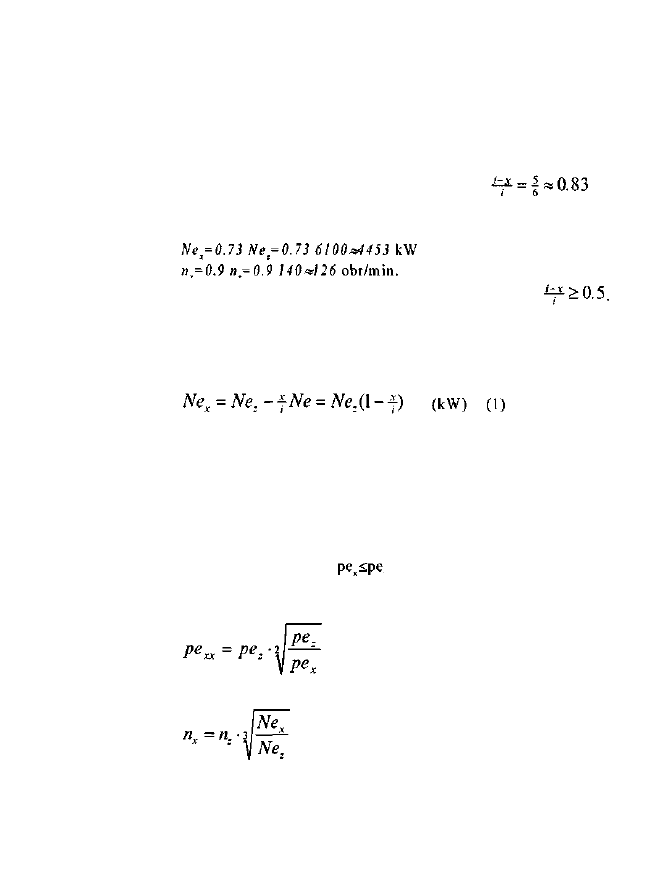
Z rys. 14 wynika, że po wyłączeniu z pracy jednego cylindra, np.
silnika MAN-BW typ 6K62EF, współczynnik ; stąd
posługując się wykresem otrzymamy zredukowaną moc użyteczną i
prędkość obrotową
Producent zaleca stosować wykresy tylko do wartości
Wartości zredukowanych mocy i prędkości obrotowych można
również przeliczyć.
Wyłączanie z pracy cylindra (-ów) zmniejszy formalnie moc użytecz-
ną silnika do wartości
gdzie
x - liczba wyłączonych cylindrów,
i - liczba cylindrów sprawnego silnika,
Ne
x
- zredukowana moc silnika,
Ne
z
- znamionowa, użyteczna moc sprawnego silnika.
Po wyłączeniu z pracy cylindra zmniejsza się sprawność mechaniczna
silnika i dlatego należy sprawdzić czy wartość średniego użytecznego
ciśnienia zredukowanego Jest mniejsza lub równa średniemu
ciśnieniu znamionowemu. Gdy tak nie jest wprowadza się korektę
wartości pe wg zapisu
(bar)
(2)
Zredukowaną prędkość obrotową wału n
x
oblicza się następująco
(obr
/
min) (3)
a po prowadzeniu korekty na pe
xx
prędkość zredukowana będzie
wynosić
(obr
/
min) (4)
Przykład:
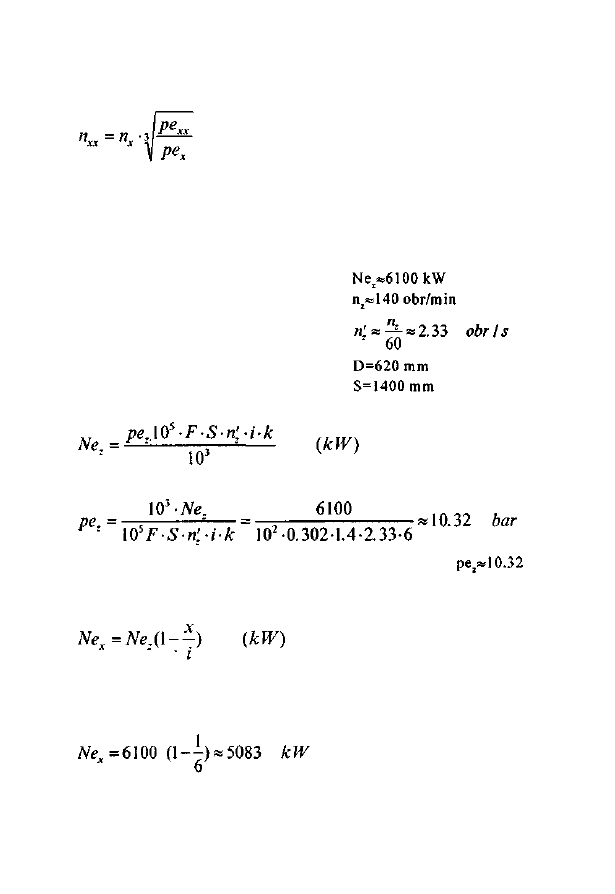
Obliczyć wartość mocy i prędkości zredukowanej w przypadku
konieczności wyłączenia z pracy jednego cylindra w silniku MAN-BW
typ 6K62EF(l)
Dane silnika:
- Moc znamionowa silnika wynosi
- Prędkość znamionowa wału wynosi
- Częstość obrotowa znamionowa
- Średnica cylindra
- Skok tłoka
Znamionową moc określa się wzorem
stąd
W pracujących cylindrach uszkodzonego silnika wartość
bar nie może być większa.
Moc zredukowana wg 1 wynosi
gdzie: x=l liczba wyłączonych cylindrów
i=6 liczba cylindrów sprawnego silnika
stąd
Obliczenie zredukowanej prędkości obrotowej
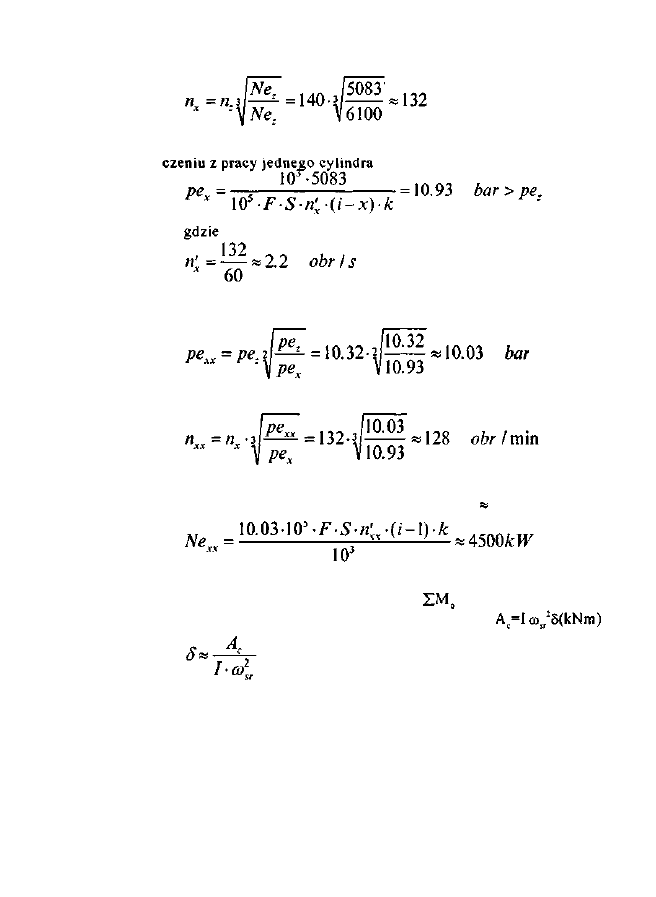
obr
/
min
Obliczenie sprawdzające wartość ciśnienia użytecznego po wyłą-
Wartość pe
x
jest więc za duża i w związku z tym należy obliczyć
wartość zredukowaną wg wzoru
Stąd wartość zredukowana n
xx
wynosi
(5)
gdzie
A
c
(kNm) - tzw. praca „nadmiarowa", która zostaje zaakumulowana
w kole zamachowym, śrubie okrętowej, wale śrubowym i częściach
ruchomych silnika w postaci E
k
, gdy M
o
>M
op
i jest oddawana w czasie ,
gdy moment oporu jest większy od momentu obrotowego silnika .
* Patrz (12) „ O k r ę t o w e silniki spalinowe'' cz.I, str. 166-171.
Zredukowana zatem moc silnika BW typ 6K62EF po wyłączeniu z
pracy jednego cylindra przy prędkości wału n
xx
128 obr/min wynosi
Po wyłączeniu z pracy cylindra lub cylindrów zmieni się rzeczywisty
sumaryczny moment obrotowy silnika oraz zwiększy się wartość
współczynnika nierównomierności biegu ponieważ stąd
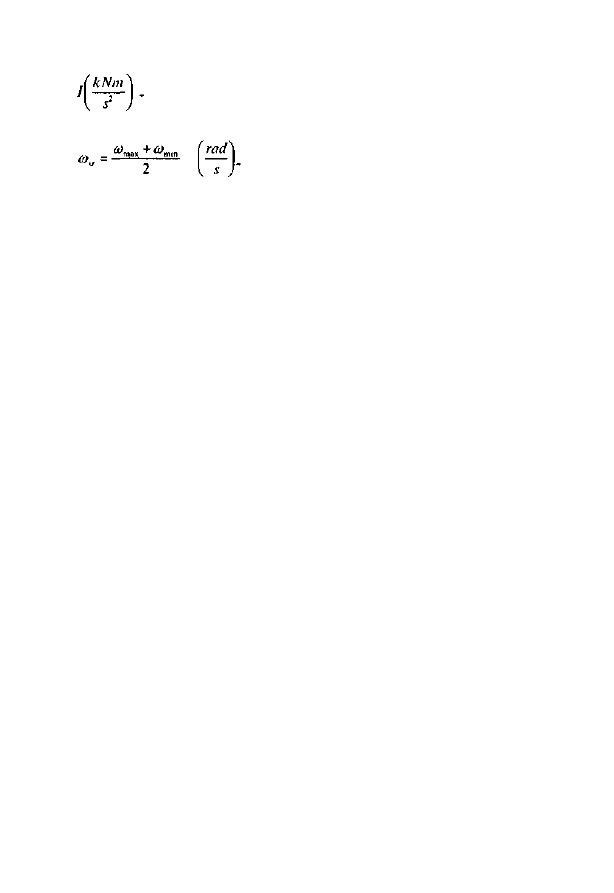
moment bezwładności wszystkich części będących w
ruchu obrotowym, zredukowany do środka czopa korby;
średnia prędkość kątowa wału korbowego.
Przy zredukowanej, a więc mniejszej prędkości obrotowej wału
wartość znacząco zwiększa się, a więc silnik będzie pracował mniej
równomiernie. Zmieniają się wówczas momenty wymuszające drgania
skrętne i ich harmoniczne. Istnieje zatem możliwość pojawienia się
nowych stref obrotów, przy których może wystąpić zjawisko rezonansu
- obroty krytyczne. Wiadomo, że w strefie obrotów krytycznych silnik
będzie pobudzany do intensywnych drgań mechanicznych. Oscylujące
wykorbienia wału korbowego są połączone z korbowodami i dalej przez
wodziki z tłokami. Cały zatem układ tłokowo-korbowy będzie pobu-
dzany do intensywnych drgań. Nie wolno eksploatować silnika w strefie
takich prędkości obrotowych. Gdyby się okazało, że obliczona uprzednio
zredukowana prędkość obrotowa leży w strefie obrotów krytycznych
należy natychmiast ją jeszcze zmniejszyć.
W silnikach doładowanych po wyłączeniu z pracy cylindra nastąpią
zakłócenia w pracy turbosprężarki, co spowoduje zmniejszenie jej
prędkości obrotowej, a więc zmniejszenie sprężu i wydajności, więc
również i mocy użytecznej silnika.
W możliwie najkrótszym czasie niesprawności należy usunąć i
eksploatować okrętowe silniki zgodnie z zasadą - zawsze tylko w pełni
sprawne i prawidłowo wyregulowane, a wówczas praca silnika będzie
bezpieczna i ekonomiczna.

Literatura i źródła
1. DTR silnika MAN-BW typ L67GFCA, Edition 5.
2. DTR silnika Sulzer typ 6RND90.
3. DTR silnika Sulzer typ 6RND-M.
4. DTR silnika Sulzer typ 6AR25/30.
5. DTR silnika Sulzer typ ZV40/48.
6. DTR silnika 12CzN18/20 „Marine Diesel Engines" - Sudoimport
USSR 1Ż3005 Moscow 1986.
7. MAN-BW „Four-Stroke Diesel Engine Programme". D23661 12
IV st 98410-1988.
8. MAN-BW „Low-Consumption Four-Stroke Heavy Fuel Engines"
D 2366117E,hi 4846, 1988.
9. Piaseczny L.„Regulacja rozrządu okrętowych silników
spalinowych". Skrytp AMW Gdynia 1980.
10. Piotrowski I. „Okrętowe silniki spalinowe". Wyd. Morskie 1971.
11. Rutkowski St. „Praca silników okrętowych przy zmniejszonych
prędkościach obrotowych wału i jej wpływ na ekonomiczność i
trwałość silników". Zeszyt szkoleniowy SSMM nr 17 Gdynia
1986.
12. Rutkowski St. „Okrętowe silniki spalinowe" - Zagadnienia
wybrane, skrypt WSM Gdynia 1986 i wydanie II uzupełnione
1990 r.
13. Sitkei G. „Uber den dieselmotorischen Zundverzug" MTZ 6/1963.
14. Sulzer „Further 5% fuel saving with RTA". Diesel News 1/1984.
15. Sulzer „General Technical Data for AT marine propulsion diesel
engines". Issue 1987 e/22.43.07.40.
16. Sulzer „RL Extract from the service instructions". Issue 1986
e/22.42.07.
17. Wanszejdt W.A. „Sudowyje dwigatieli wnutriennego sgoranija"
Sudostrojenije, Leningrad 1978.
Wyszukiwarka
Podobne podstrony:
BADANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH REGULATORÓW PID, SGGW Technika Rolnicza i Leśna, Auto
BADANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH REGULATORÓW PID 2, SGGW Technika Rolnicza i Leśna, Au
7. Charakterystyki statyczne i dynamiczne regulatorów pneumatycznych, Rok II, Semestr 4, P. T. S. i
BADANIE STATYCZNYCH I DYNAMICZNYCH WŁAŚCIWOŚCI REGULATORÓW PID
Temat nr 6 - Dynamika układu korbowo-tłokowego, Silniki okretowe
BADANIE STATYCZNYCH I DYNAMICZNYCH WŁAŚCIWOŚCI REGULATORÓW PID
CZYNNOŚĆ STATYCZNA I DYNAMICZNA MIĘŚNIA, Fizjoterapia, Biomechanika
17 Zasady obsługiwania i użytkowania silników okrętowych
Kręgosłup stanowi?ntralną oś ciała spełniając rolę statyczną i dynamiczną
Konfiguracja protokołów routingu statycznego i dynamicznego
Temat nr 4 - Doładowanie silników okrętowych, Silniki okretowe
Wyznaczanie stałej sprężystości k metodą statyczną i dynamiczną, Akademia Morska, Fizyka lab
Statyczny Dynamiczrouting
Wyrównoważenie statyczne i dynamiczne elementów wirujących
POMIAR MOCY INDYKOWANEJ SILNIKA OKRĘTOWEGO
obciążenie statyczne i dynamiczne
więcej podobnych podstron