w w w. e l e k t r o . i n f o . p l
n r 1 0 / 2 0 0 4
47
i n s t a l a c j e e l e k t r o e n e r g e t y c z n e
W
poprzednich artykułach [4] i [7]
opisano metody projektowania
pasywnych filtrów prostych. Metody te
mają swoje wady i zalety. Cechą wspól-
ną jest to, że wymagają założenia, iż fil-
try te są pozbawione części rzeczywi-
stej impedancji, R
Fn
= 0. Wymagają
także znajomości pewnych wzorów,
z których należy skorzystać przy pro-
jektowaniu filtrów.
Algorytmy Genetyczne umożliwiają
uwzględnienie rezystancji filtrów, ich
wzajemnego wpływu na siebie, oraz
dają możliwość optymalizacji wielokry-
terialnej. Wystarczy znać tylko podsta-
wowe wzory analityczne oraz skonstru-
ować funkcję celu, a Algorytm Gene-
tyczny sam znajdzie rozwiązanie pro-
blemu. Podkreślić należy, że Algorytmy
Genetyczne należą do grupy metod pro-
babilistycznych, przez co mogą znajdo-
wać rozwiązanie bliskie optymalnemu,
ale niekoniecznie optymalne.
algorytmy genetyczne
Jak większość prostych metod po-
wstały na bazie obserwacji przyrody.
Osobnik, który jest lepszy, silniejszy
szybszy, dłużej przeżyje i będzie miał
więcej potomków, które odziedziczą
po nim te cechy. Algorytmy Genetycz-
ne różnią się od tradycyjnych metod
optymalizacyjnych kilkoma podsta-
wowymi cechami:
nie przetwarzają bezpośrednio
parametrów zadania, lecz ich za-
kodowaną postać,
prowadzą przeszukiwanie, wy-
chodząc nie z pojedynczego punk-
tu, lecz z pewnej ich populacji,
korzystają tylko z funkcji celu, nie
korzystają zaś z pochodnych lub
innych pomocniczych informacji,
stosują probabilistyczne, a nie de-
terministyczne reguły wyboru,
umożliwiają dowolne kształtowa-
niu funkcji celu, co umożliwia wy-
korzystanie AG do optymalizacji
wielokryterialnej.
W skład podstawowego Algorytmu
Genetycznego wchodzą:
inicjalizacja populacji początko-
wej,
dekodowanie chromosomów do
przestrzeni parametrów zadania,
wyznaczenie wartości funkcji celu
dla każdego osobnika,
sprawdzenie warunku kończące-
go pracę algorytmu,
operator selekcji,
operator krzyżowania i mutacji.
Ważne jest, by zauważyć, że AG
dostarczają potencjalnych rozwiązań
danego problemu, a wybór rozwiąza-
nia ostatecznego pozostawiają użyt-
kownikowi. W przypadku, gdy szcze-
gólny problem nie ma jednego roz-
wiązania, np. rodzina pareto-opty-
malnych rozwiązań jak w przypad-
ku wielokryterialnej optymalizacji,
wtedy AG są potencjalnie użytecz-
ne do identyfikacji tych alternatyw-
nych rozwiązań.
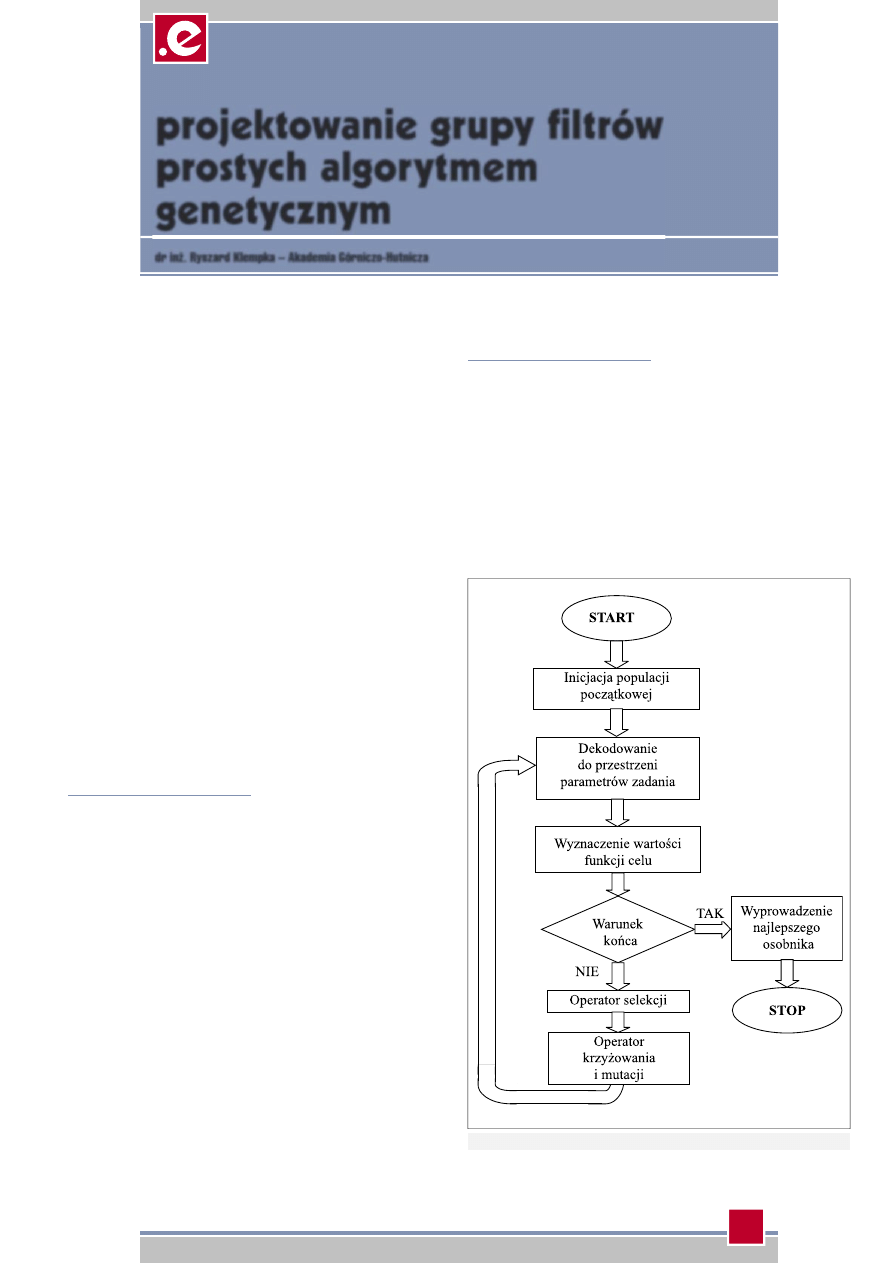
Schemat blokowy podstawowe-
go Algorytmu Genetycznego został
przedstawiony na
rysunku 1. W za-
stosowaniach praktycznych sche-
mat ten jest bardziej rozbudowany,
np. o przekształcenie funkcji celu
w funkcję przystosowania oraz do-
datkowe operatory. Również podsta-
wowe operatory jak selekcja, krzyżo-
wanie i mutacja mogą wyglądać ina-
czej niż podaje to literatura opisując
zasadę działania AG. Różnice te wy-
nikają z adaptacji AG do postawione-
go zadania.
inicjacja populacji
początkowej
W tej części należy określić pod-
stawowe parametry Algorytmu Ge-
netycznego, takie jak: liczność popu-
lacji (liczba chromosomów w popu-
lacji), ilość parametrów zadania, jak
długi będzie chromosom, jaki alfabet
zostanie użyty. Po określeniu tych pa-
rametrów, losowo generuje się popu-
lację początkową. Algorytm Gene-
tyczny zazwyczaj startuje z zupełnie
losowego punktu (losowej populacji
początkowej). Osobniki są kodowane
jako ciągi (chromosomy) odpowied-
niego alfabetu. W większości zasto-
sowań używa się reprezentacji alfa-
betu binarnego {0, 1} lub Gray ’a, acz-
kolwiek w niektórych przypadkach
można użyć np. alfabetu trójkowego,
liczb całkowitych lub rzeczywistych,
itp. Ciągi kodowe nie zawierają in-
formacji o problemie, który rozwią-
zujemy. Proces przeszukiwania dzia-
ła na zakodowanych zmiennych de-
projektowanie grupy filtrów
prostych algorytmem
genetycznym
dr inż. Ryszard Klempka – Akademia Górniczo-Hutnicza
Rys. 1 Schemat blokowy podstawowego Algorytmu Genetycznego
w w w. e l e k t r o . i n f o . p l
n r 1 0 / 2 0 0 4
48
i n s t a l a c j e e l e k t r o e n e r g e t y c z n e
cyzyjnych, a nie na zmiennych decy-
zyjnych bezpośrednio.
Przykładowo, jeżeli mamy dwie
zmienne decyzyjne, które będziemy
kodować kodem binarnym odpowied-
nio o długości 10 i 15 bitów, to chro-
mosom (osobnik) będzie wyglądał na-
stępująco:
Cała zaś populacja osobników jest
macierzą o wymiarach zdefiniowa-
nych jako:
1 0
1 1
1 1
0 0
0 1
1 0
1 1
0 1
L
L
M
M O M
M
L
L
1
2
444
3
444
chromosom
m
chromosom
chromosom N
1
2
liczność
populacji = N
długość chromosomu
Σ długości kodu dla każdego
z paramerów
dekodowanie
Dekodowanie chromosomów do
przestrzeni parametrów zadania –
aby Algorytmy Genetyczne mogły
poprawnie pracować, jest koniecz-
ne dekodowanie genotypów (chro-
mosomów) do fenotypów, czyli do
przestrzeni parametrów zadania.
Pierwszym etapem jest dekodowa-
nie z n-kodu do postaci dziesiętnej,
a następnie wartości te należy prze-
skalować do zakresu zmienności da-
nego parametru zadania.
x a y
b a
m
= +
−
−
2
1
gdzie:
x – wartość parametru,
a, b – zakres zmienności parametru,
y – zdekodowana wartość binarna,
m – długość ciągu binarnego.
Czasami przy dużych zakresach
zmienności parametru stosuje się
logarytmiczny zapis wartości, dzię-
ki czemu uzyskuje się krótsze chro-
mosomy.
funkcja celu
Mając zdekodowaną reprezentację
chromosomu jest możliwe ocenienie
poszczególnych członków populacji.
Dokonuje się to przez funkcję celu lub
funkcję przystosowania. Funkcja celu
jest pojęciem podstawowym wynika-
jącym z postawionego problemu. Jed-
nak Algorytmy Genetyczne stawiają
pewne ograniczenia na funkcję oce-
niającą osobniki. Funkcja ta ma być
nieujemna. Z właściwości AG wyni-
ka dążenie do maksymalizacji funk-
cji oceniającej. A jeżeli chcemy zna-
leźć minimum systemu? W wielu za-
stosowaniach wymagane jest złoże-
nie wielu kryteriów pożądanych w za-
daniu optymalizacyjnym z różnymi
wagami ważności do jednej funkcji
oceniającej populację. Dlatego funkcja
celu przekształcana jest i skalowana,
a wynik tych operacji nazwany jest
funkcją przystosowania. Na podsta-
wie tej funkcji dokonywana jest se-
lekcja do puli rodzicielskiej.
Do skalowania funkcji celu zasto-
sować można skalowanie liniowe
lub ranking. Obie metody zapobiega-
ją zbyt szybkiej zbieżności (domina-
cji lepszego osobnika), jak też ślepe-
mu błądzeniu AG.
zakończenie pracy
algorytmu genetycznego
Warunek zakończenia pracy AG za-
leży od konkretnego zadania optyma-
lizacyjnego. Algorytm może zakończyć
pracę, gdy funkcja celu (przystosowa-
nia) osiągnie wartość maksymalną
(pod warunkiem, że wartość ta jest
znana). Innym sposobem jest licze-
nie odchyłki funkcji celu w populacji.
Jeżeli jest ona mała, algorytm kończy
działanie. Najczęściej stosowanym wa-
runkiem zakończenia pracy Algoryt-
mu Genetycznego jest określenie ilości
pokoleń, czyli liczby iteracji pętli głów-
nej. Możliwe jest też zakończenie AG,
gdy po pewnej ilości iteracji nie znaj-
dzie się lepszego osobnika.
selekcja
Najważniejszy operator w AG pole-
ga na wybraniu na podstawie warto-
ści funkcji przystosowania tych chro-
mosomów, które będą brały udział
w tworzeniu nowego pokolenia. Wy-
bór ten odbywa się zgodnie z zasadą
naturalnej selekcji, tzn. najbardziej
przystosowany ma największą szan-
sę na udział w tworzeniu nowej po-
pulacji. Istnieje wiele metod selek-
cji, np.:
wybór deterministyczny,
wybór losowy z powtórzeniami –
ruletka,
wybór losowy bez powtórzeń,
wybór losowy według reszt z po-
wtórzeniami,
wybór losowy według reszt bez
powtórzeń,
uniwersalne losowanie,
turnieje losowe.
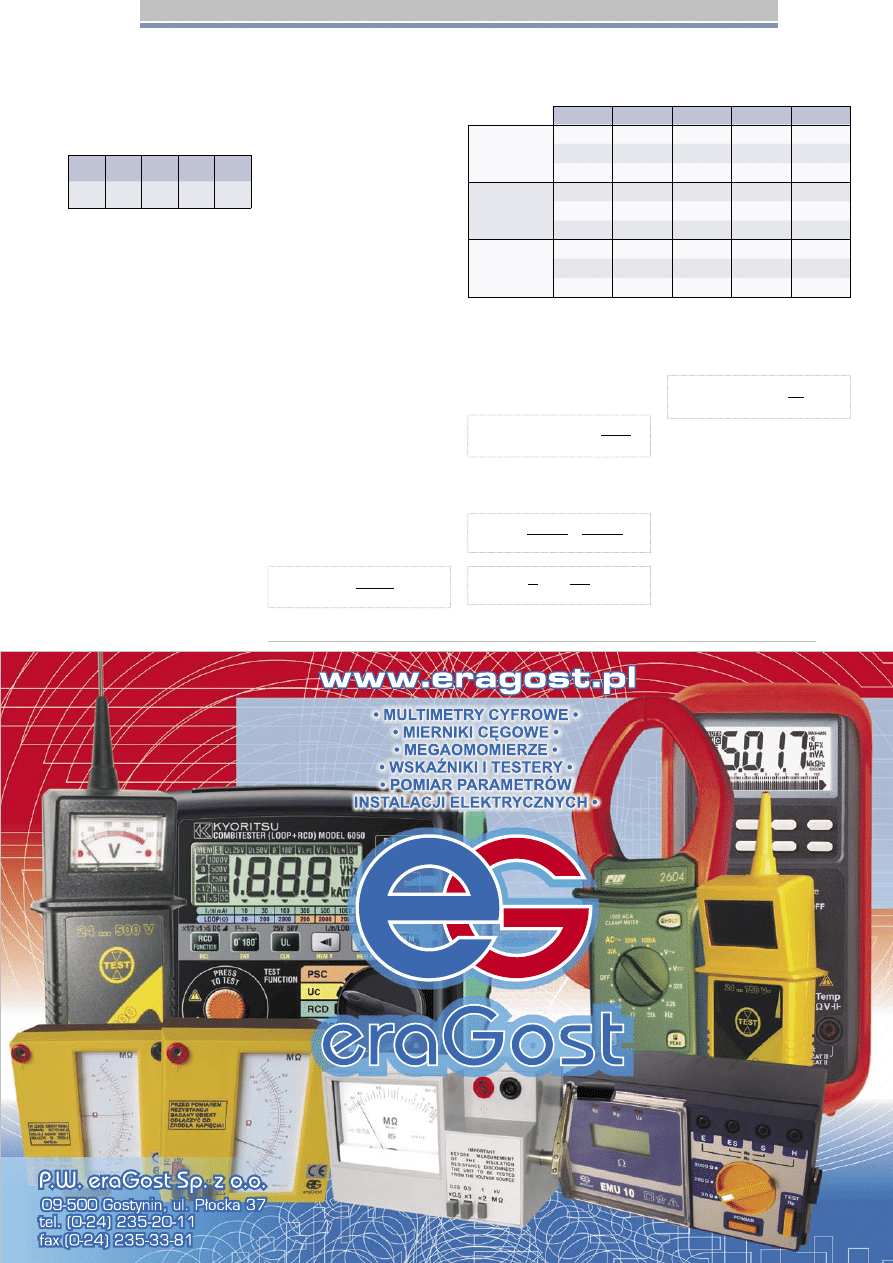
Koło ruletki jest dobrą metodą do
zobrazowania zasady AG (lepszy osob-
nik otrzymuje większy obszar koła,
przez co ma większe szanse na dosta-
nie się do puli rodzicielskiej).
v
p
p
f
f
i
i
i
i
i
i
N
= ⋅
=
=
∑
100
1
%
gdzie:
v
i
– wielkość wycinka koła przyzna-
nego i-temu osobnikowi w %,
p
i
– prawdopodobieństwo selekcji.
Rys. 2 Przykładowe koło ruletki z przy-
dzielonymi obszarami dla osob-
ników populacji
krzyżowanie i mutacja
Operator ten ma za zadanie wy-
mieniać miedzy osobnikami informa-
cje przez nich niesione. Dzięki temu
operatorowi Algorytm Genetyczny
przeszukuje przestrzeń parametrów
zadania. Przeszukiwanie to jest ukie-
runkowane przez statystycznie lepsze
osobniki z populacji wybrane pod-
czas selekcji. Krzyżowanie polega na
wymianie między osobnikami rodzi-
cielskimi podciągów kodowych. Krzy-
żowanie można podzielić na:
jednopunktowe,
wielopunktowe,
tasowanie.
Różnice pomiędzy tymi krzyżowa-
niami wynikają z gęstości wymienia-
nych informacji.
Krzyżowanie jednopunktowe moż-
na zobrazować na przykładzie dwóch
osobników wybranych z puli rodzi-
cielskiej:
Przypuśćmy, że wybierając losowo
jedną z liczb od 1 do 7, otrzymaliśmy
lk=4. Operacja krzyżowania daje dwa
nowe ciągi wchodzące w skład nowe-
go pokolenia:
A’1 = 01100101
A’2 = 11001011
Operator mutacji ma ograniczone
działanie. Statystycznie rzadko doko-
nuje modyfikacji jakiegoś osobnika.
Jego zadaniem jest losowa zmiana lo-
sowej informacji w losowym osobni-
ku. Jeżeli jakiś osobnik ulega mutacji,
losuje się gen podlegający temu pro-
cesowi. Następnie zamienia się dany
gen na przeciwny tzn. 0 zamieniane
jest na 1, a 1 na 0.
Przedstawiony opis Algorytmu Ge-
netycznego dotyczy jego wersji pod-
stawowej. W praktycznych zastoso-
waniach stosuje się, w zależności od
sposobu zapisu chromosomu, zmody-
fikowane operatory genetyczne (se-
lekcja, krzyżowanie i mutacja), jak
również stosuje się inne dodatkowe
operatory, przyśpieszające działanie
AG. Wiele informacji na ten temat
można znaleźć w [2].
Algorytmy Genetyczne
w projektowaniu
zespołu filtrów
Dla porównania wyników, uży-
jemy AG do zadania postawione-
go w [7], czyli należy zaprojektować
cztery filtry proste jednogałęziowe
o sumarycznej mocy 1 MVAr, pracu-
jące na napęciu 6 kV (założeni R
F
=
0 jest zbędne). Filtry mają za zadanie
eliminację harmonicznych o nume-
rach 5, 7, 11 i 13.
w w w. e l e k t r o . i n f o . p l
n r 1 0 / 2 0 0 4
49
U = 6 kV
Q
F
= 1 MVAr
n
r
5
7
11
13
ω
(n)
500
π
700
π
1100
π
1300
π
Pamiętamy z poprzednich artyku-
łów, że znaczącym problemem było
dokonanie podziału mocy na po-
szczególne filtry. W przypadku AG
ten problem nie istnieje. Należy za-
łożyć, w jakich granicach wartości
mogą się zmieniać wartości poszcze-
gólnych kondensatorów. Decyduje-
my, że wszystkie cztery kondensa-
tory będą miały wartość w zakresie
C
min
= 1 µF, C
max
= 100 µF.
Zgodnie z teorią AG należy ustalić
pewne parametry:
liczność populacji N = 100,
każdy z parametrów kodowany
będzie w kod binarny o długości
8 bitów,
prawdopodobieństwo krzyżowa-
nia p
k
= 0,8,
prawdopodobieństwo mutacji
p
m
= 0,01,
zastosowano krzyżowanie przez
tasowanie (wymiana informacji
co jeden bit),
selekcja SUS (za jednym obrotem
koła ruletki losujemy całą pulę ro-
dzicielską),
warunek końca AG – 100 pokoleń.
Pozostaje określić funkcję celu. Jak
pamiętamy wykres modułu impedan-
cji zespołu czterech równoległych fil-
trów prostych, wykres ten posiada
cztery minima (cztery eliminowane
harmoniczne), trzy maksima dla har-
monicznych rzędu 6., 9. i 12. (tak sta-
wiamy cel projektowy) oraz koniecz-
ne jest, aby cały zespół filtrów kom-
pensował zadaną moc bierną. Z te-
go opisu wynika 8 kryteriów (czte-
ry minima, 3 maksima oraz określo-
na moc filtrów).
Minima zapewnimy sobie poprzez
wyznaczanie indukcyjności poszcze-
gólnych filtrów ze wzorów na pulsa-
cję rezonansową:
L
C
Fn
rn Fn
=
1
2
ω
Konieczne jest wyznaczenie impe-
dancji całego zespołu filtrów dla pul-
sacji podstawowej oraz dla 6., 9. i 12.
harmonicznej.
Z
R
j L
j
C
Fn
Fn
Fn
Fn
=
+
−
ω
ω
1
Dla filtrów powietrznych tej mocy
prawdziwy jest wzór empiryczny:
R
X
X
Fn
L
Hz
C
Hz
=
+
(
)
(
)
50
50
100
5000
1
1
Z
Z
Fn
n
=
∑
Dla pulsacji podstawowej prawdzi-
wa jest zależność:
imag Z
j
U
Q
( )
= −
2
czyli dla danych z zadania
X = –j36 Ω.
Algorytm Genetyczny będzie dą-
żył, aby różnica wartości X i wyzna-
czonej reaktancji zespołu filtrów była
jak najmniejsza oraz w żadnym razie
nie spadła poniżej tej wartości (war-
tość bezwzględna), gdyż spowodu-
je to przekompensowanie. Pozostaje
zapewnić maksymalizację impedan-
nr
5
7
11
13
Klasycznie
C
Fn
[
µ
F]
33,24
24,23
15,61
13,24
L
Fn
[mH]
12,2
8,5
5,4
4,5
Q
Fn
[kVar]
391,63
279,73
178,01
150,63
Macierze
C
Fn
[
µ
F]
45,33
19,95
10
10,7
L
Fn
[mH]
8,9
10,4
8,4
5,6
Q
Fn
[kVar]
533,94
230,3
113,93
121,79
GA
C
Fn
[
µ
F]
45,17
19,88
10,67
9,95
L
Fn
[mH]
9
10,4
7,8
6
Q
Fn
[kVar]
532,1
229,5
121,7
113,3
Tab. 2 Parametry filtrów wyznaczone obiema metodami
reklama
w w w. e l e k t r o . i n f o . p l
n r 1 0 / 2 0 0 4
50
i n s t a l a c j e e l e k t r o e n e r g e t y c z n e
3. Hanzelka Z., Klempka R., Filtry
wyższych harmonicznych – wy-
brane zagadnienia. Napędy i Ste-
rowanie, 3, 9, 2000.
4. Hanzelka Z., Klempka R., Pasywne
filtry wyższych harmonicznych,
„elektro.info” 6 / 2003.
5. Klempka R., Hanzelka Z., Applica-
tion of Genetic Algorithm in Do-
uble Tuned Filters Design, EPE
2001, Graz.
6. Klempka R., Designing a group of
single-branch filters, Electrical
Power Quality and Utilisation
2003, Kraków.
7. Klempka R., Projektowanie grupy
filtrów prostych z uwzględnie-
niem ich wzajemnych wpływów,
„elektro.info” 7 / 8 / 2004.
8. Klempka R., Hanzelka Z., Filtr pa-
sywny podwójnie nastrojony, za-
projektowany Algorytmem Gene-
tycznym. SENE’01, Łódź, 2001.
9. Klempka R., Hanzelka Z., Filtering
Properties of the Selected Do-
uble Tuned Passive Filter Struc-
tures Designed Using Genetic Al-
gorithm, EPE PEMC 2002, Dubro-
vnik.
10. Harder J.E., AC filter arrester ap-
plication. IEEE Trans. on Power
Delivery, 11, 3, 1996.
11. Xiao Yao, Algorithm for the para-
meters of double tuned filter. 8th
Int. Conf. on Harmonics and Qu-
ality of Power, Oct. 14-16, 1998,
Athens.
sku, że Algorytmy Genetyczne prawi-
dłowo dobrały parametry filtrów.
Pokazana metoda jest przykładem
zastosowania AG pokazującym, że są
one użytecznym narzędziem optyma-
lizacyjnym. Jednak należy pamiętać,
że jeżeli można otrzymać prawidłowe
wyniki metodą analityczną, wtedy
nie powinno się stosować AG. W tym
przypadku, uwzględnienie rezystan-
cji filtrów pozwoliło zastosować AG.
Uwzględniono podczas projekto-
wania filtrów ich wzajemny wpływ
oraz ich rezystancję. To jednak może
nie być wystarczające. W systemach
energetycznych każdy element sys-
temu będzie wywierał wzajemny
wpływ (impedancja sieci, transforma-
tor, odbiornik, itd.). Dopiero uwzględ-
nienie tych elementów pozwoli na
prawidłowe projektowanie grupy fil-
trów. Algorytmy Genetyczny mogą
być użytecznym narzędziem w ta-
kiej optymalizacji.
literatura
1. Chi-Jui Wu, Jung-Chen Chiang
etc., Investigation and mitigation
of harmonic amplification cau-
sed by single-tuned filters. IEEE
Trans. on Power Delivery, 13, 3,
1998.
2. Goldberg D. Genetic Algorithms
in Search, Optimization, and Ma-
chine Learning, WNT (in polish)
1995.
cji dla harmonicznych 6., 9. i 12. Za-
pewnione to zostanie poprzez dzie-
lenie obliczonej impedancji zespołu
filtrów przez iloczyn impedancji dla
odpowiednich harmonicznych. Ce-
chą naturalną AG jest maksymaliza-
cja funkcji celu. W tym zagadnieniu
wykorzystamy nadawanie rang osob-
nikom w kolejności rosnącej. Nadawa-
nie rang jest to przekształcenie funk-
cji przystosowania w funkcję celu,
przez co zapewnia się wartości dodat-
nie funkcji celu, chroni się populację
przed dominacją jednego superosob-
nika oraz przed przedwczesną zbież-
nością do optimum lokalnego. W za-
leżności od potrzeby sortujemy osob-
niki ze względu na funkcję celu rosną-
co lub malejąco i przypisujemy im ran-
gi z zakresu od 0 do 2, co umożliwi naj-
lepszemu osobnikowi mieć dwóch po-
tomków, średniemu jednego potom-
ka, a najsłabszego wyeliminuje (sta-
tystycznie rzecz biorąc). Możliwe są
oczywiście inne zakresy rang.
F
U
imag Z
Z
Z
Z
dla im
przyst
Hz
Hz
Hz
Hz
=
−
(
)
10
6
2
50
300
450
600
(
)
(
)
(
)
(
)
*
*
aag Z
Hz
50
36
(
)
( )
>
Dla pozostałych przypadków
F
przyst
= 10
10
.
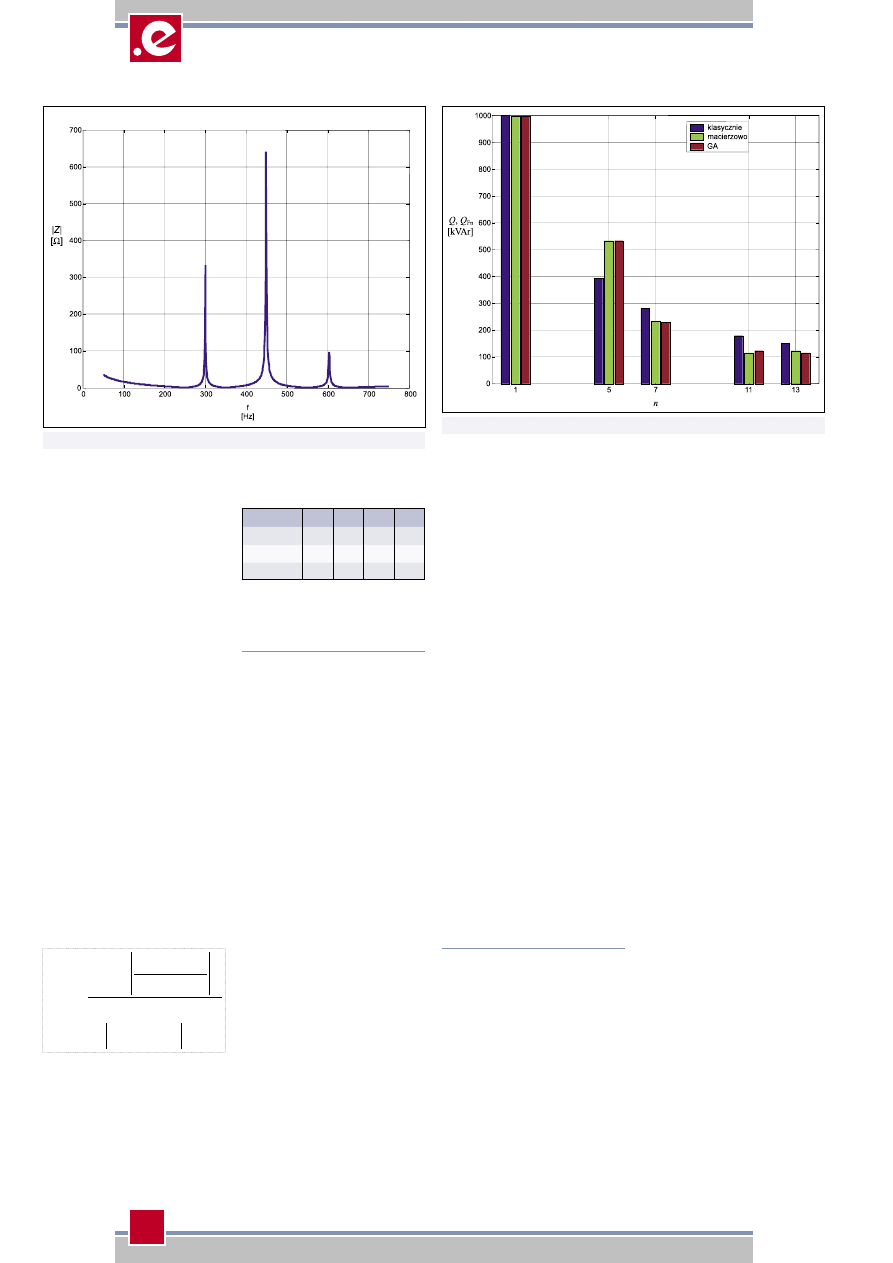
Dla tak skonstruowanego AG uru-
chomiono program, który po ok. 2 mi-
nutach podał rozwiązanie przedsta-
wione w
tabeli 1, a wykres impedan-
cji zespołu filtrów na
rysunku 3.
nr
5
7
11
13
C
Fn
[
µ
F]
45,17 19,88 10,67 9,95
L
Fn
[mH]
9
10,4
7,8
6
Q
Fn
[kVar] 532,1 229,5 121,7 113,3
Tab. 1 Parametry filtrów wyznaczone
przez AG
wnioski
Jak widać na wykresie 3, Algorytm
Genetyczny prawidłowo zaprojekto-
wał zespół filtrów prostych. Problem
podziału mocy na poszczególne filtry
został rozwiązany przez AG bez udzia-
łu projektanta. Uwzględniono wza-
jemne wpływy filtrów oraz ich rezy-
stancje. Trzecie maksimum jest prze-
sunięte trochę na prawo i nie pokry-
wa się z 12. harmoniczną, lecz jest jej
bliskie. Dla przypomnienia AG nale-
żą do grupy metod probabilistycznych
stąd możliwość znalezienia rozwiąza-
nia prawie optymalnego zamiast do-
kładnie jego.
W
tabeli 2 zestawiono wyniki
otrzymane w artykule [2] oraz otrzy-
mane za pomocą AG.
Na
rysunku 4 zestawiono wartości
mocy poszczególnych filtrów otrzy-
manych metodami opisanymi w ar-
tykule [2] oraz za pomocą Algorytmu
Genetycznego. Jak widać, filtry otrzy-
mane za pomocą AG są bardzo zbli-
żone do filtrów otrzymanych metodą
macierzową, co uprawnia do wnio-
Rys. 4 Zestawienie mocy poszczególnych filtrów otrzymanych różnymi metodami
Rys. 3 Impedancja zespołu filtrów wyznaczona Algorytmem Genetycznym
Wyszukiwarka
Podobne podstrony:
ei 2004 10 s040
ei 2004 10 s036
ei 2004 10 s051
ei 2004 10 s038
ei 2004 10 s068
ei 2004 10 s005
ei 2004 10 s044
ei 2004 10 s072
ei 2004 10 s028
ei 2004 10 s004
ei 2004 10 s014
ei 2004 10 s043
ei 2004 10 s035
ei 2004 10 s075
ei 2004 10 s077
ei 2004 10 s023
ei 2004 10 s003
ei 2004 10 s026
ei 2004 10 s008
więcej podobnych podstron