1
WADY I ZALETY SILNIKÓW.
Zalety: Moc od mW do MW 2) Duży zakres obrotów 3) mogą być : zewnętrzne, wewnętrzne
4) niezawodne w pracy 5) mogą pracować we wszystkich kwadrantach 6) równomierny bieg
(silnik DC pracują nierównomiernie poniżej 20obr/min) 7) są ciche 8) prosta konserwacja,
ekologicznie czysty. Wady: 1) konieczność dostarczania ciągłego prądu kablami 2) nasycanie
obwodu magnetycznego (niekorzystny stosunek moc/masa) 3) wrażliwość na długotrwałe
przeciążenia (temp.izolacji) 4) brak małych obrotów (przekładnie).
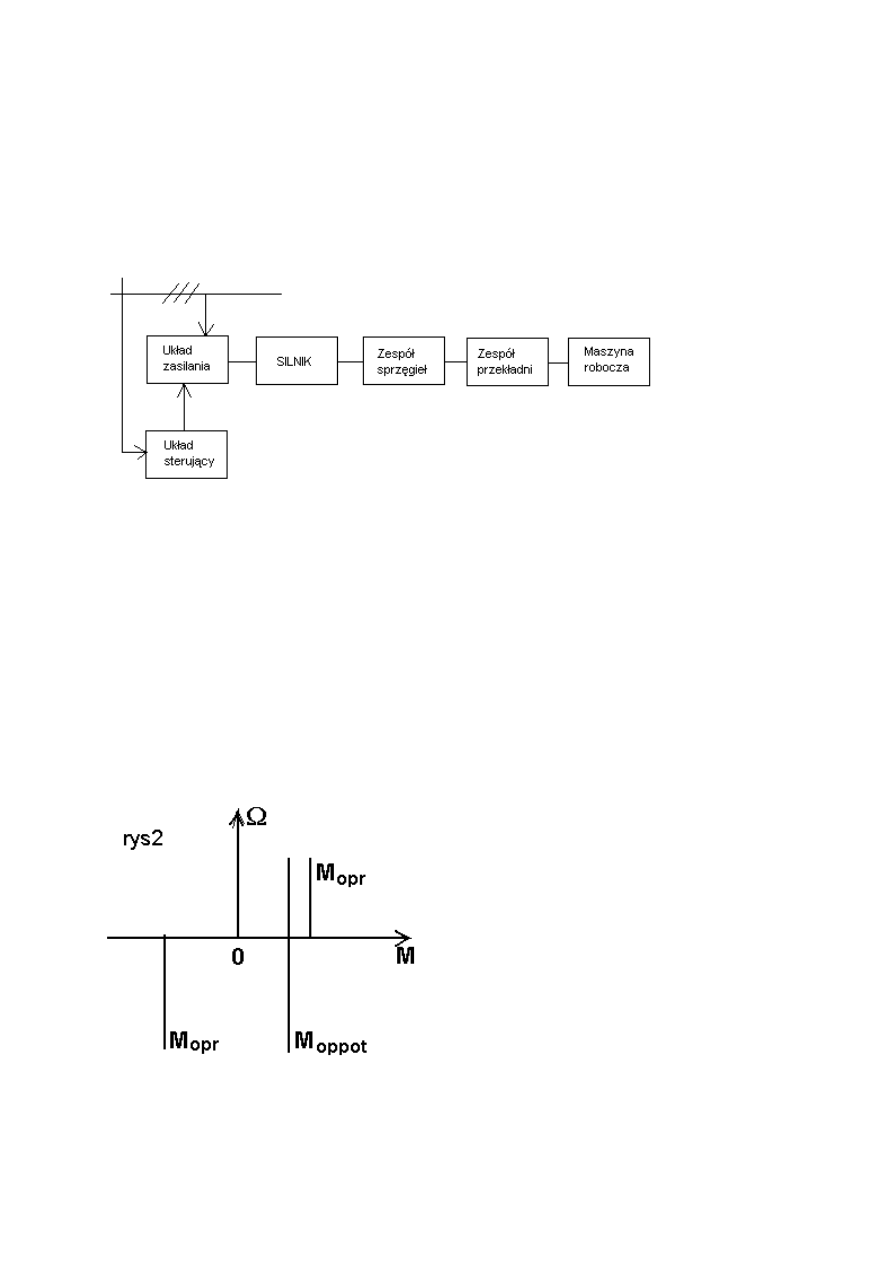
NAPĘD. RÓWNANIE DYNAMIKI NAPĘDU.
Napęd –
Rys
.1. Stany pracy napędu: 1) Stan ustalony (statyczny) =const ,V=const,
d/dt=0, dV/dt=0 2)Stan nieustalony (dynamiczny) =var ,V=var, d/dt≠0, dV/dt≠0 .Jeżeli
silnik wytwarza M a maszyna działa M
0
(moment oporowy). M
n
–M
0
=M
d
–moment
dynamiczny; M
0
=M
u
–M
s
– uzyteczny M
s
–strat; M
d
–pozwala na rozruch i hamowanie;
Energia
układu
E
k
=J
2
/2
J-
moment
bezwładności;
P
d
=dU
k
/dt=
(d/dt)J
2
/2=
Jd/dt+(
2
/2)(dJ/dt) –moc potrzebana na zmiane dynamiki; M=P/; M
d
=J(d/dt)+
(/2)dJ/dt; =d/dt , dJ/dt=(dJ/d)(d/dt)=dJ/d , M
d
=(
2
/2)(dJ/d)+Jd/dt;
Przyjmijmy że J=const; M
d
=M
n
-M
o
=jd/dt –równanie dynamiki napędu. Moment
wytwarzany przez silnik którego znak jest zgodny z kierunkiem prędkości nazywamy
napędem i oznaczamy „+”. Moment wytwarzany przez silnik o zwrocie przeciwnym do
prędkości nazywamy hamującym i oznaczamy „-” Moment oporowy (statyczny) - moment
jaki przeciwdziała ruchowi. Wyróżnia się dwa typy momentów oporowych :1)Reakcyjny
M
opr
– M
r
(bierny) Jest to moment skierowany zawsze przeciwnie do kierunku ruchu (np.
tarcie). 2)Potencjalny (czynny). Jest to moment skierowany w określonym kierunku
niezależnie od prędkości(podnoszenie-opuszczanie ciężaru).
Rys
.2. M
0
=f(,,d/dt,...,t) Ograniczamy się do M
0=
f(). Momenty oporowe.
M
op
=M
0
+k.
2
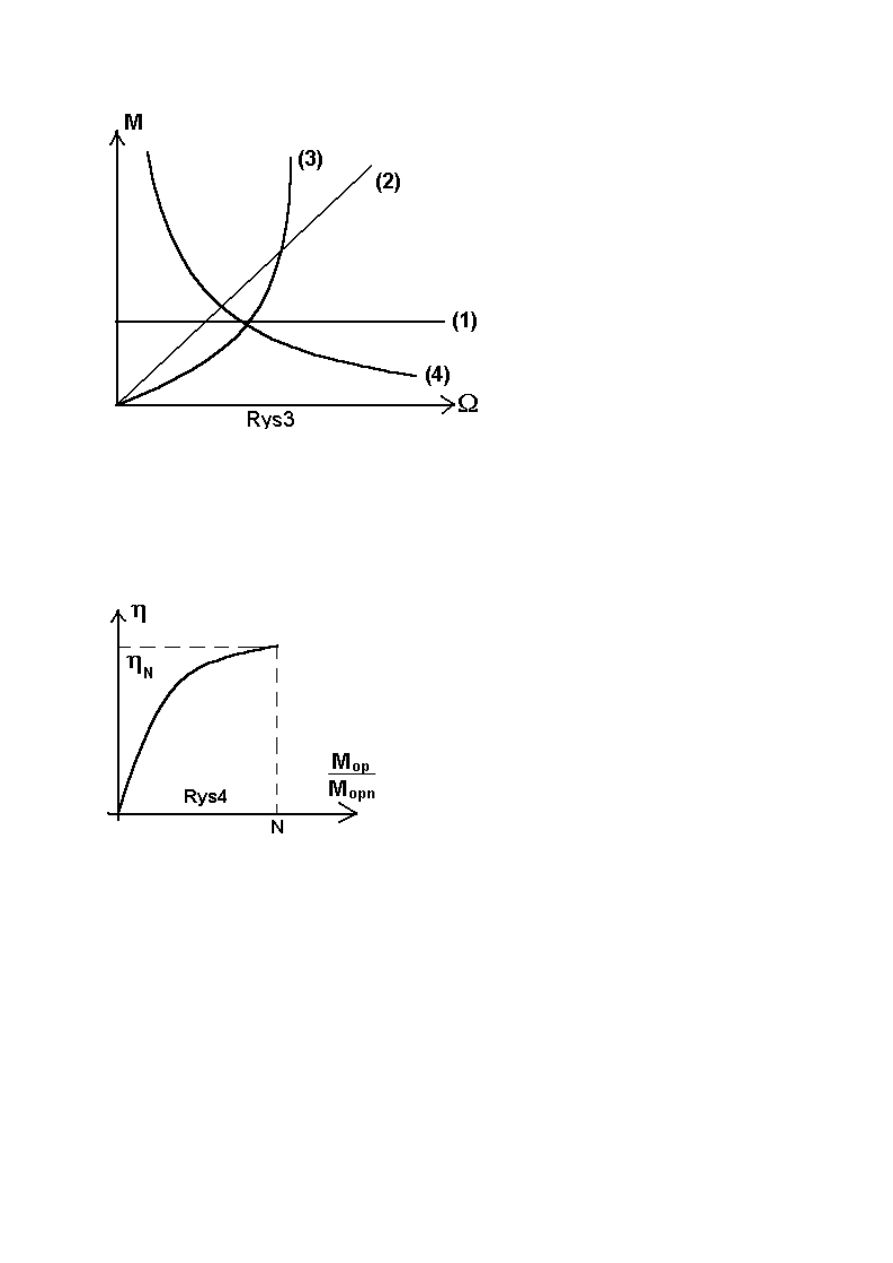
Rys
.3. (1)mechanizmy podnoszenia, jazdy, taśmociągi M=const. (2) M=k - maszyny do
gładzenia włókna, moment na wale prądnicy. I
m
=const., I
obc
=const. (3) M=k
1
2
– moment
wentylatorowy pompy i wirówki odśrodkowej. (4) M=k/ - maszyny do nawijania drutu
taśmy, obrabiarki skrawaniem. Przeliczanie momentów obrotowych do prędkości silnika
(przeliczanie momentów na wał): M
opz
–moment oporowy zastępczy(odczuwany na wale
silnika). Wychodząc z bilansu mocy. M
opz
=M
opm
*
m
/
s
=M
opm
/i . Uwzględniając straty
przekładni i jej sprawność. Straty mogą pomagać lub przeszkadzać w zależności od tego co
robimy(np. podnosimy, opuszczamy).
Rys
.4. M
opz
=M
opm
/i* „podnoszenie” M
opz
=M
opm
*/i „opuszczanie” Dla strat w przekładni
takich samych dla podnoszenia i opuszczenia. Podnoszenia: M=(M
opz
)
ze stratami
–(M
opz
)
bez strat
;
M=M
opm
/i*-M
opm
/i
=
(M
opm
/i)((1/)-1)=
(M
opm
/i)(1-)/
Opuszczanie
(M
opz
)
opuszczanie
=(M
opz
)
baz strat
–M=(M
opm
/i)-(M
opm
/i)((1-)/) , (M
opz
)
opuszczanie
=(M
opm
/ i)(1-(1-
)/)=(M
opm
/i )((-1+2)/) . Przy opuszczaniu mamy 3 przypadki 1)>0,5 ; M
opz
>0 ; jażeli
opuszczamy ciężar silnik musi wytworzyć moment hamujący w kierunku podnoszenia.
2)<0,5 ; M
opz
<0 ; ciężar nie pokona strat w przekładni silnik musi wytworzyć moment
napędowy w kierunku opuszczania (siłowe opuszczanie ładunku). 3) =0,5 ; M
opz
=0 ciężar
wisi na linie, pozostaje nieruchomy.
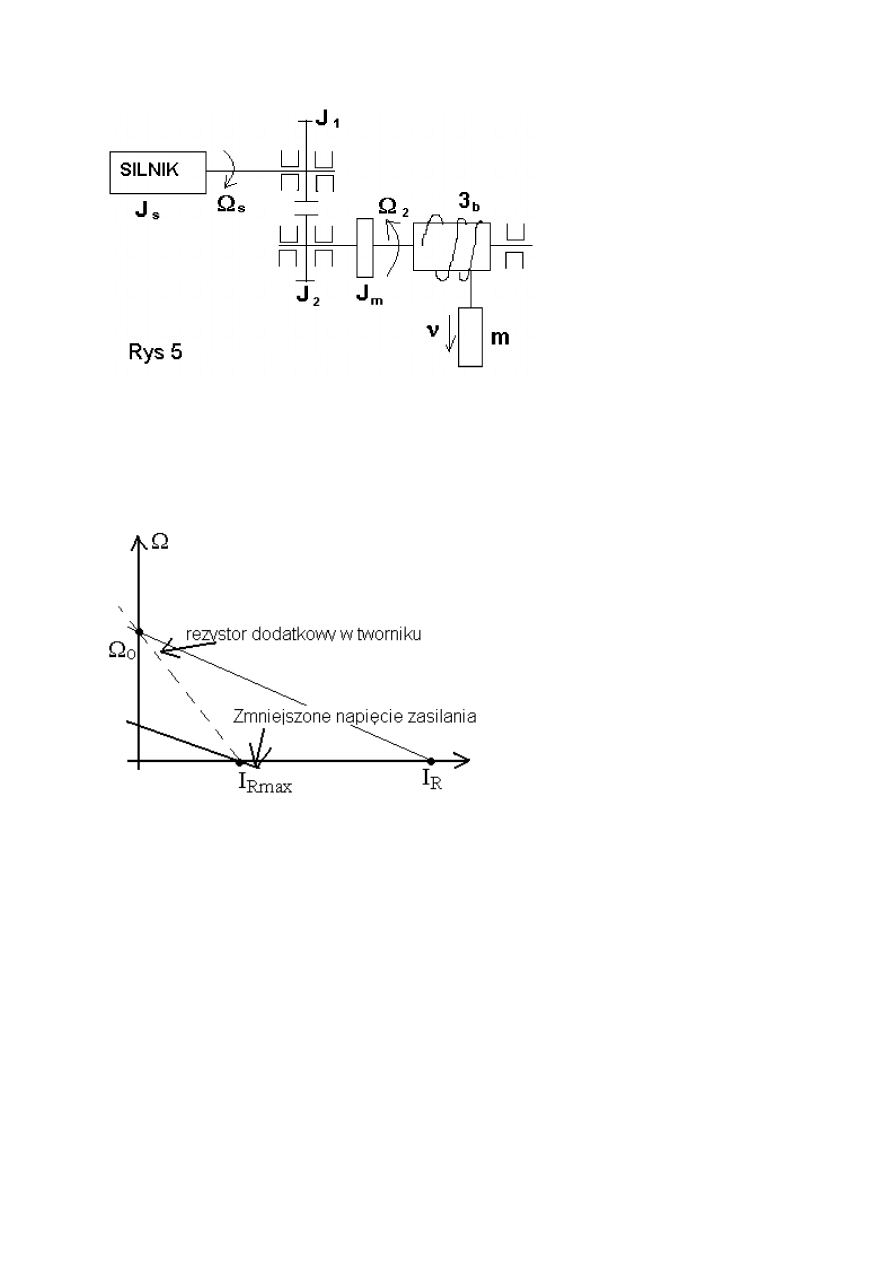
3
Przeliczanie momentu bezwładności -
Rys
.5. E
k
silnika musi być równa E
k
reszty układu
E
k
=J
2
/2 , J
2
=
s
2
/2=J
s
(
s
2
/2) + J
1
(
s
2
/2) + J
z
(
z
2
/2) + J
m
(
z
2
/2) + J
b
(
z
2
/2) + m
2
/2 ;
J
z
=J
s
+J
1
+ (J
z
+ J
m
+ J
b
)/i
2
+m
2
/
s
2
. Jeżeli przełozenie jest zmniejszające to J
z
+ J
m
+ J
b
ma
mały wpływ bo i>1 1>>1. Odwrotnie jest dla zwiększającego i. J[kgm
2
] J=Gd
2
/4 (Gd
2
-
moment zamachowy). Stany dynamiczne napędów 1)Rozruch 2)Hamowanie.
ROZRUCH SILNIKÓW OBCOWBUDNYCH DC.
Dla silników od kilku do kilkudziesięciu kW, =5,10%
Rys
.7. dla =5%, I
R
=20I
N
; =10%, I
R
= 10I
N
. Dla większych mocy silników jest
mniejsza. Zakładamy że I
Pmax
- maksymalny jaki chcemy mieć, żeby nie był większy. I
R
można ograniczyć U lub R np. rezystor dodatkowy. Zmniejszenie U zasilania jest
korzystniejsze niż włączanie R
d
.
4
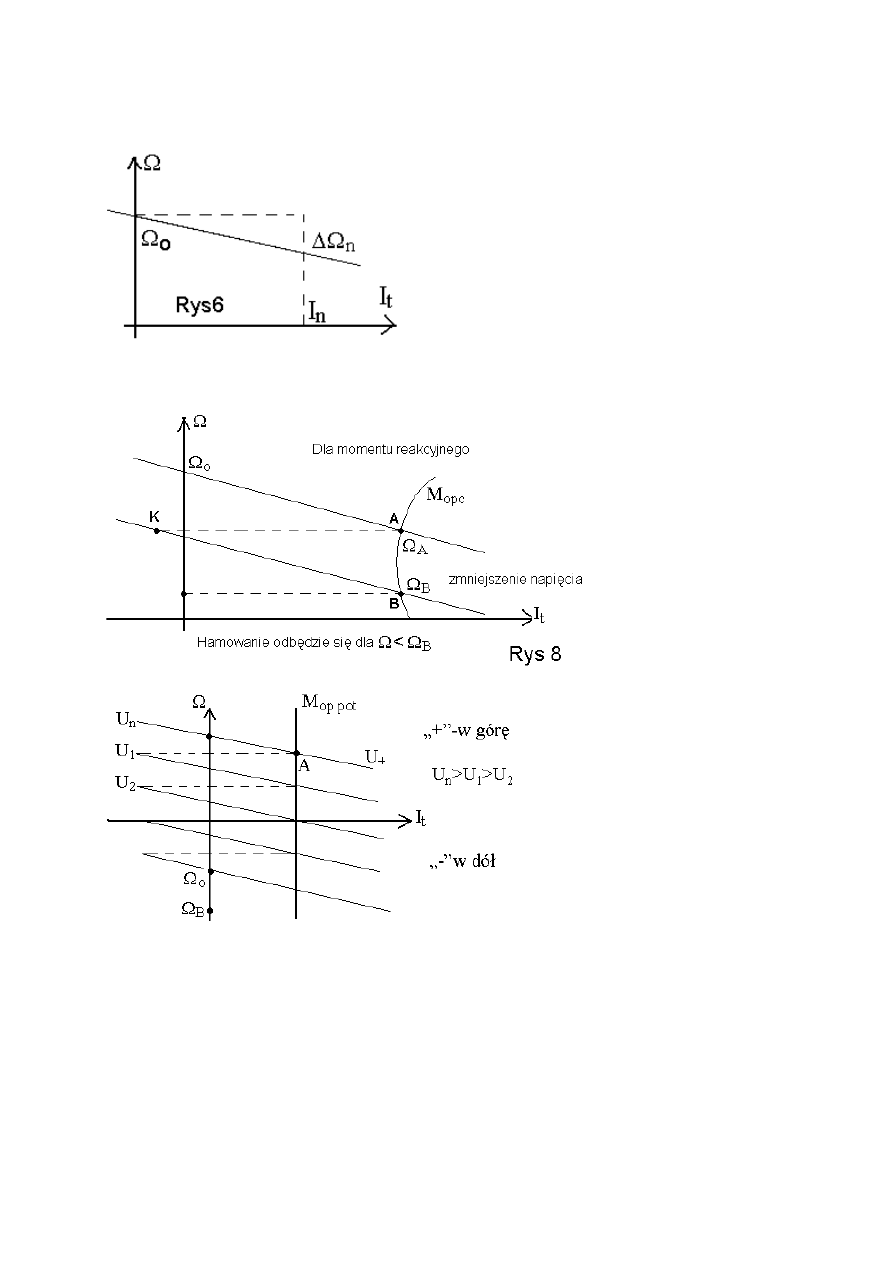
HAMOWANIE SILNIKÓW OBCOWZBUDNYCH DC.
=(U-I
t
R
t
)/c , M
n
= c*I
t
, =(U/ c)-MR
t
/( c)
2
=
o
-
n
Rys
.6. Dla U=U
n
i =
n
jest to charakterystyka naturalna, inne wartości U, -
charakterystyka
sztuczna.
Hamowanie:
1)
Odzyskowe
2)Dynamiczne
3)przez
przeciwwłączenie Ad1) Występuje ono dla >idealnego biegu jałowego
Rys
.8. Hamowanie odbywa się dla <
B
Rys
.9. Jest to hamowanie z oddawaniem energii do sieci dla >idealnego biegu jałowego.
Ad2) dynamiczne- Polega na odłączeniu silnika od sieci i przyłączeniu na jego zaciski
opornika. Wzbudzenie pozostaje bez zmian. Dla momentu reakcyjnego U=E-I
t
*Rt, I
t
=(U-
E)/R
t
, Prze hamowaniu 0=E+I
t
(R
t
+R
h
) , I
t
=-E/(R
t
+R
n
) =-c/(R
t
+R
h
)
5
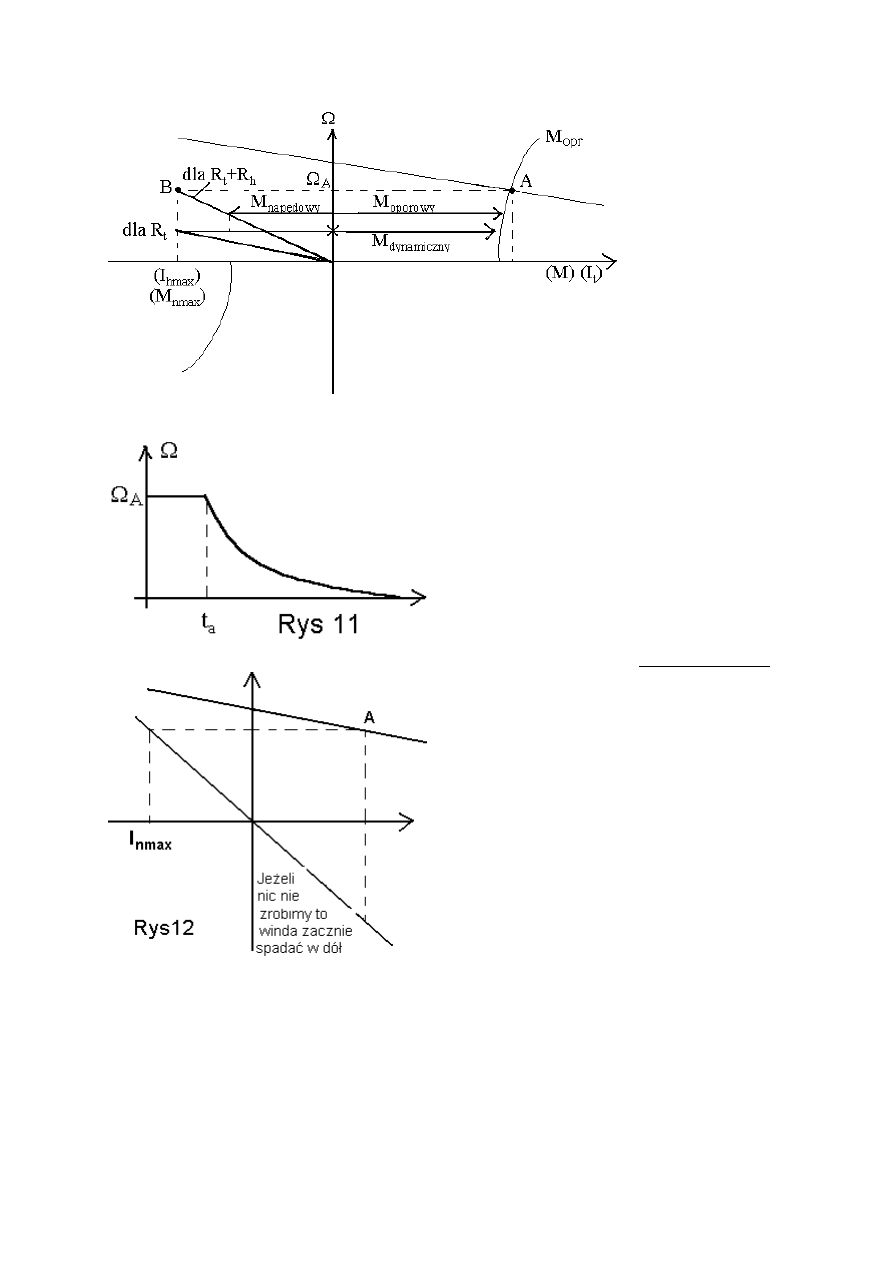
Rys
.10. Wyłączenie po pewnym czasie R
h
- zwiększa się M
d
i mamy szybsze hamowanie. R
n
dobieramy na pewną wartość I
t
Prąd płynący przy R
n
=0 byłby bliski I
r
Rys
.11. zaleta: prostota, wada: maleje intensywność ze zmianą prędkści. Dla potencjalnego
Rys
.12. trzeba dla =0 zastosować hamulec mechaniczny. Cała energia zostaje całkowicie
tracona w tworniku R
n
(jaką posiada silnik E
k
=J
2
/2) . Ad3) Hamowanie przez
przeciwwłączenie polega na względnej zmianie kierunków obrotów i momentu obrotowego
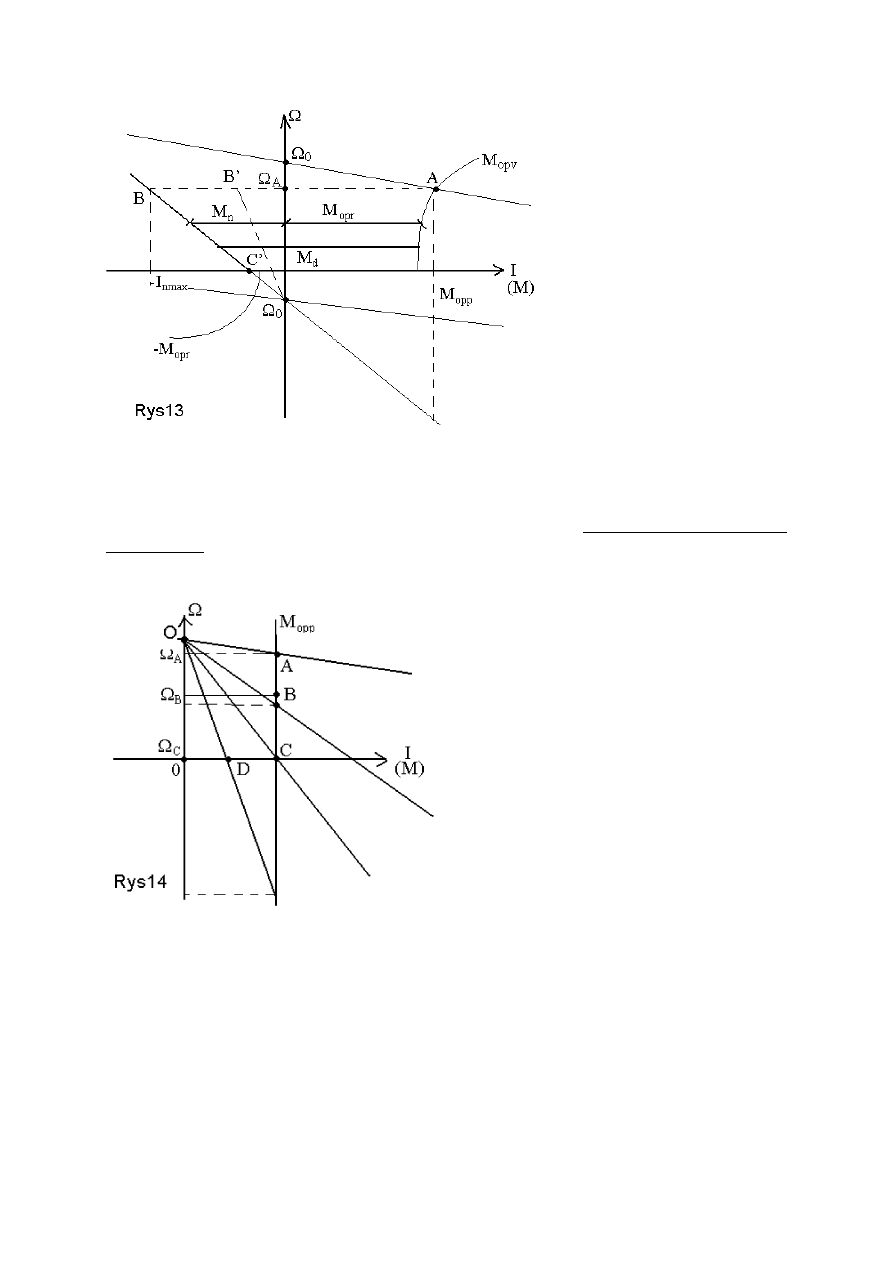
6
Rys
.13. Przy takim włączeniu podwaja się siła elektromot.i prąd płynący wynosi 2x I
p
–prąd
rozruchowy , hamowanie jest bardziej intensywne. Pkt. C silnik ma =0. Jeżeli nic nie
robimy to silnik zacznie się obracać w drugą stronę Włączając R
d
poruszamy się po B’C’ i
wtedy silnik nie ruszy w drugą stronę bo M
opr
>M
N
lecz prąd będzie płyną i silnik będzie się
nagrzewał. W obu przypadkach trzeba go odłączyć od sieci. Przy momencie oporowym
potencjalnym charakterystyka jest podobna tylko trzeba włączyć hamulec mechaniczny. W
przeciwnym razie nastąpi rozruch w przeciwną stronę i wirowanie z prędkością
m
. Przy
momencie potencjalnym nie trzeba zmieniać kierunku przepływu prądu.
Rys
.14. Zwiększając rezystor dodatkowy można uzyskać OD. Nie jest to dobre bo mała
zmiana rezystancji powoduje dużą zmianę prędkości. Jest to bardzo szybkie hamowanie,
należy zastosować należy zastosować układ który wyłączy napięcie od silnika. Przy
hamowaniu są straty energii. Jest ona równa 3xE
k
układu.
STEROWANIE PRĘDKOŚCI SILNIKÓW DC.
Sterowanie prędkości nazywamy wymuszone przez urządzenie lub przyrząd zmiany
prędkości silnika. Osiągnięty poziom silnika będzie się zmieniał z charakterystyką. Napędem
regulowanym nazywamy napęd którego prędkość można sterować skokowo lub ciągle.
Zakres regulacji prędkości – jest to stosunek prędkości max do min przy znamionowym
obciążeniu i narzuconej przeciążalności J lub M. Obydwie te prędkości winny być osiągnięte
7
bez przekroczenia dopuszczalnego ze względów technologicznych względnego biegu
prędkości.
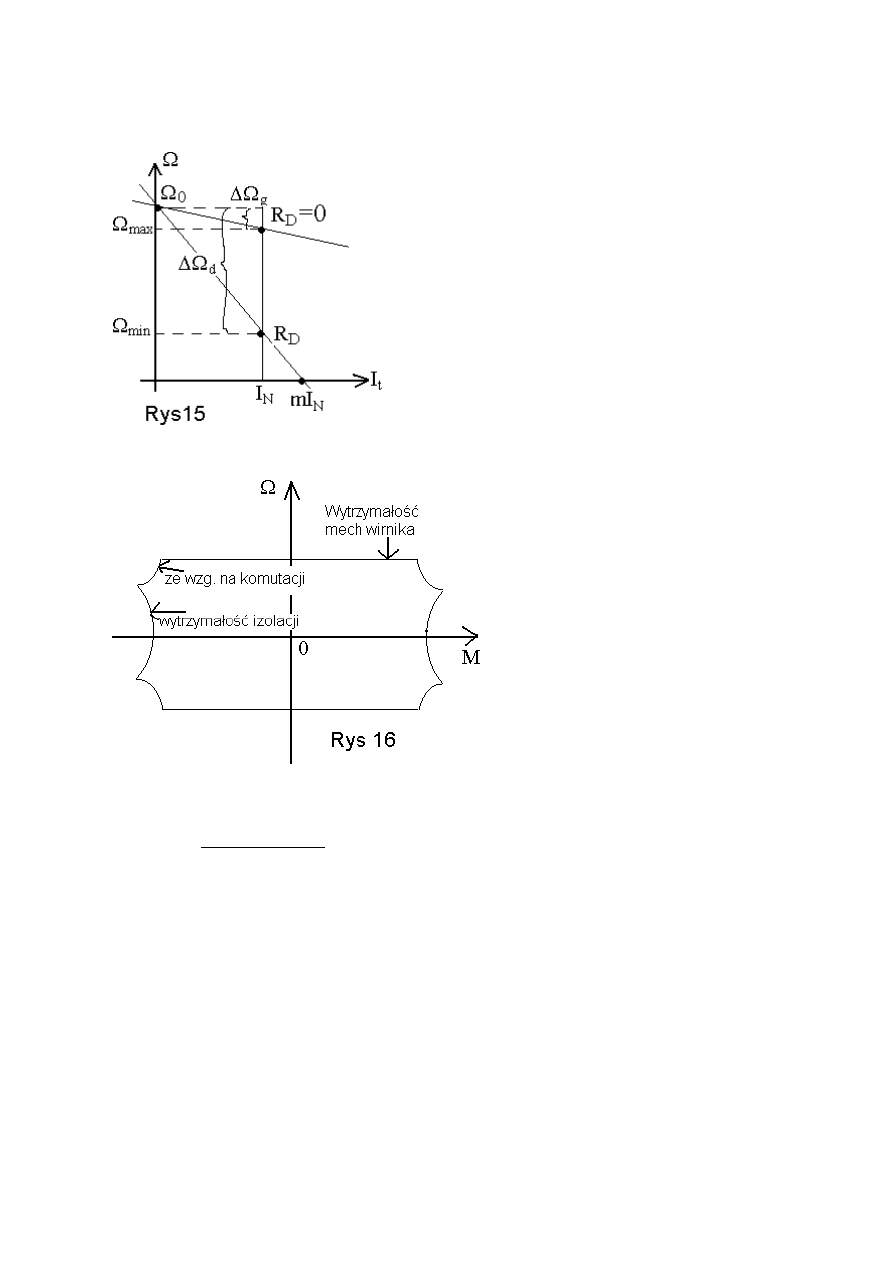
Rys
.15. =
max
/
min
=x:1 , względny spadek prędkości
=/
0
d
=
d
/
0
d
-duże
-
małe. Kryteria Regulacji :-zakres regulacji, -płynność regulacji, -względy ekonomiczne
Rys
.16. =(U-I
t
∑R)/c=U/- I
t
∑R/c=U/c-M∑R /(c)
2
=
0
-. PRĘDKOŚĆ
SILNIKÓW OBCOWZBUDNYCH MOŻNA REGULOWAĆ PRZEZ:
1)Zmiana napięcia zasilania 2)Zmiana rezystancji twornika 3) Zmiana strumienia
wzbudzenia. Zmiana napięcia (stały strumień bez reakcji twornika)
8
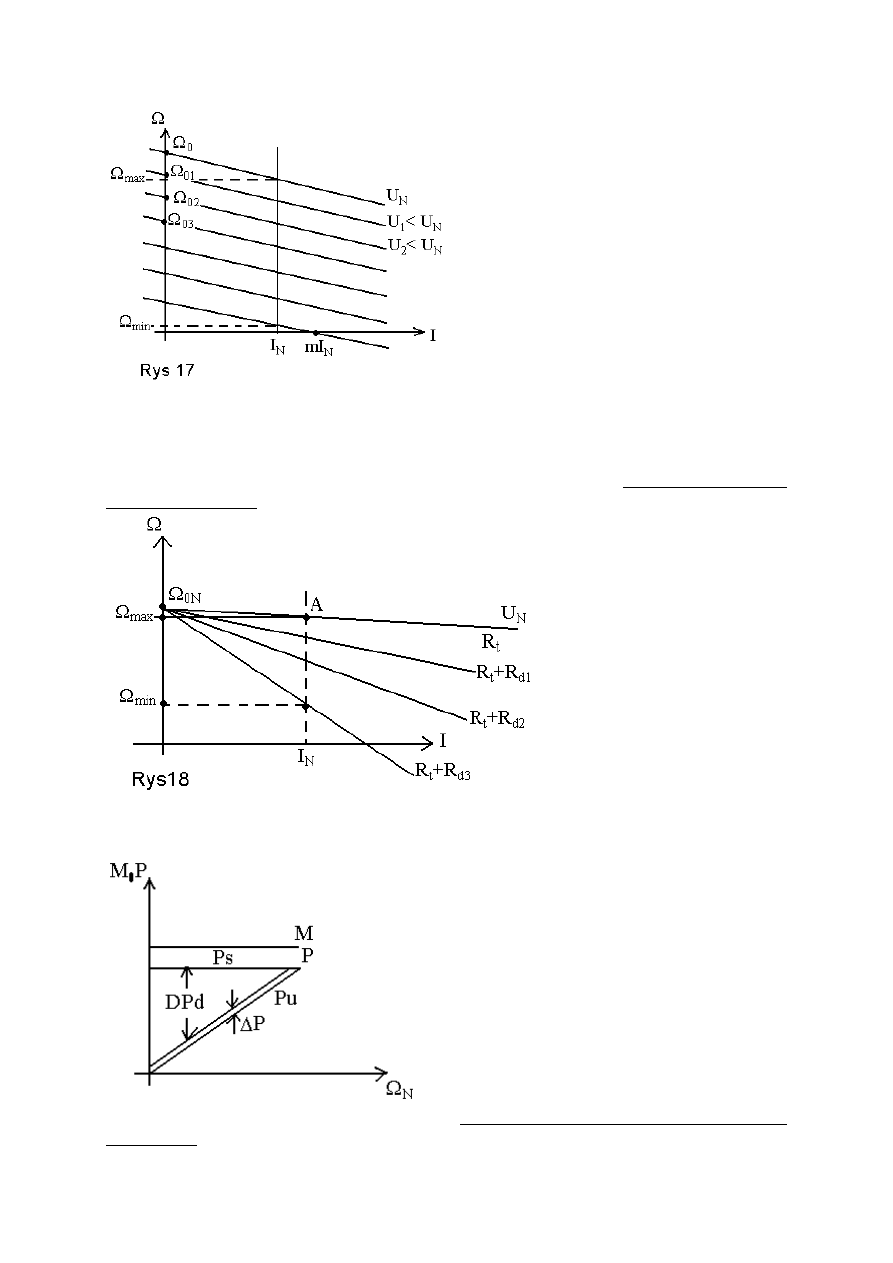
Rys
.17. 1)U=Var, ∑R
t
=const=R
t
, =const . Cechy: charakterystyka tworzy rodzina prostych
równoległych. Dolna charakterystyka ogranicza przecinalnością a górna wartościami
znamionowymi. Nie podnosi się napięcia znamionowego, ze względu na wytrzymałość
dielektryczną izolacji (regulacja w dół). Duży zakres regulacji 5:1, 8:1. Jest to regulacja przy
stałej wartości momentu i zmiennej mocy. P=M, M=cI
t
=const. Zmiana rezystancji w
rezystancji twornika.
Rys
.18. 2) ∑R
t
=var , =const, U=const.Cechy: 1)regulacjia w dół 2)zakres regulacji jest
mały 2:1, 3:1. 3)Prostota układu 4)Dodatkowe straty w rezystorze. Regulacja przy stałym M i
zmiennej mocy. Moc pobierana z sieci jest stała a moc na wale jest mała.
Rys
.19. =P/(P+P+P
d
) =P/P
S
, to .Zmiana prędkości przez zmianę strumienia
wzbudzenia.
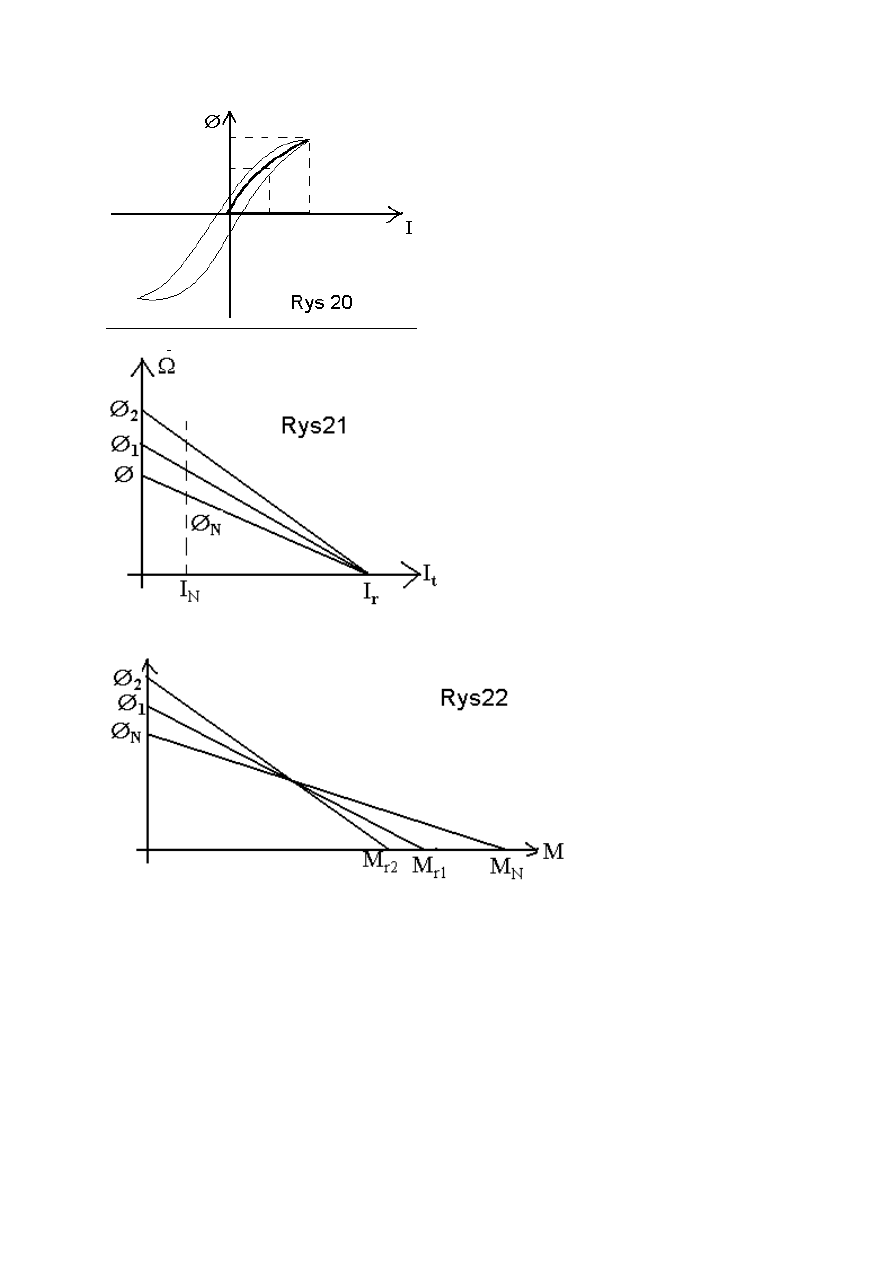
9
Rys
.20. =U/Ø-I
t
R
t
/cØ=U/cØ-MR
t
/(cØ)
2
, M=cØI ,
Rys
.21. 0=I
t
R
t
/cØ, I
t
=U/R
t
=I
r
, Charakterystyki nie wiele odbiegają od znamionowych . Lecz
w funkcji momentu to charakterystyki wyglądają następująco. 0=cØU/R=> M
r
=cØU/R
t
=cØI
R
Rys
.22. Cechy: Regulacja tylko w górę, ze względu na nasycenie obwodu magn. Nie
stosujemy zwiększania strumienia. Dolną charakterystyką wyznacza charakterystyka
nominalna, zaś górną podaje producent w danych katalogowych (jeżeli nie jest podane to
Ø
x
>= ½ Ø
N
). Regulacja odbywa się przy stałej mocy i zmiennym momencie na wale silnika.
Silnik jest zasilanym stałym napięciem więc pobiera stały prąd czyli moc pobierana z sieci
jest stała. Przy małych obrotach powinno stosować się chłodzenie obce. Wraz ze
zmniejszaniem strumienia, charakterystyki są coraz bardziej opadające, ale w zakresie
praktycznego zastosowania nie ma to większego znaczenia. Sterowanie prędkością odbywa
się prawie bez strat dodatkowych. (zwiększają się straty mechaniczne, a zmniejszają się straty
wzbudzenia ) Sterujemy obwodem wzbudzenia- obwodem małej mocy. Realizacja
praktyczna sterowania prędkości silników obcowzbudnych. –Układ Leonarda :
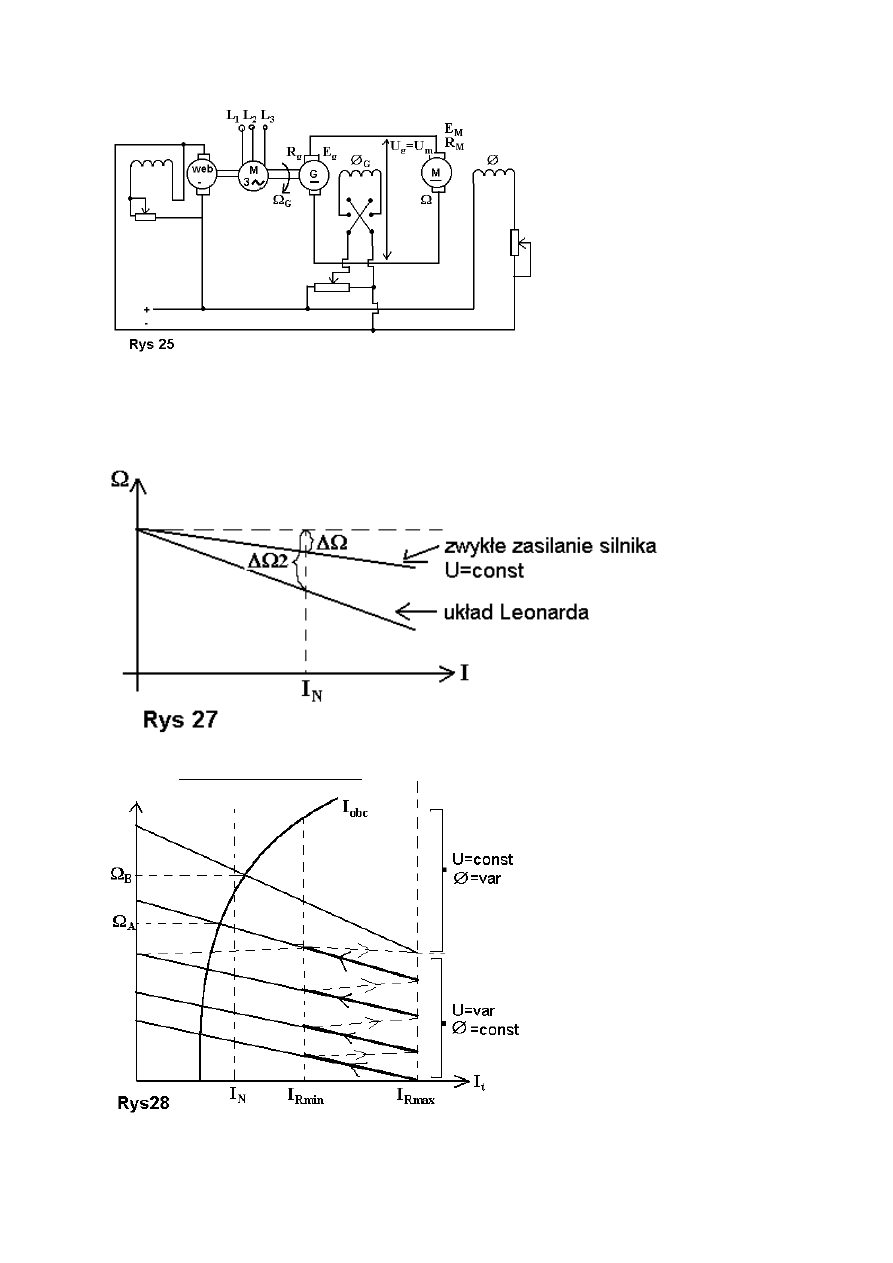
10
Rys
.25. Stany ustalone. –charakterystyka obciążenia : U
G
=E
G
-I
t
R
g
;U
m
=E
m
+I
t
R
m
; E
R
-I-
t
R
G
=E
M
+I
t
R
M
;
E=cØ
;
cØ=E
G
-I
t
(R
G
+R
M
);
=(E
G
-I
t
(R
G
+R
M
)/cØ
;
E
G
=cØ
G
G
=c
1
I
WG
=RI
WG
; =(KI
WG
-I
t
(R
G
+R
M
)/cØ=
0
-, zmieniając prąd wzbudzenia
generatora (I
WG
), zmieniamy .
0
=kI
WG
/cØ, =(I/cØ)(R
G
+R
M
); =(U/cØ)-I
t
R
M
/cØ
,
2
=(kI
WG
/cØ)-It(R
N
+R
G
)/cØ zał U/cØ~kI
WG
/cØ .
Rys
.27. Wada : szybciej spada prędkość obrotowa układu przy tym samym I
t
bo jest
(R
G
+R
N
). Rozruch w ukł. Leonarda
Rys
.28. Stosując rezystor suwakowy zamiast skokowego można uzyskać rozruch przy stałym
prądzie, płynnie przechodząc z charakterystyki na charakterystykę. I
t
=(E
G
-E
M
)/(R
G
+R
M
)
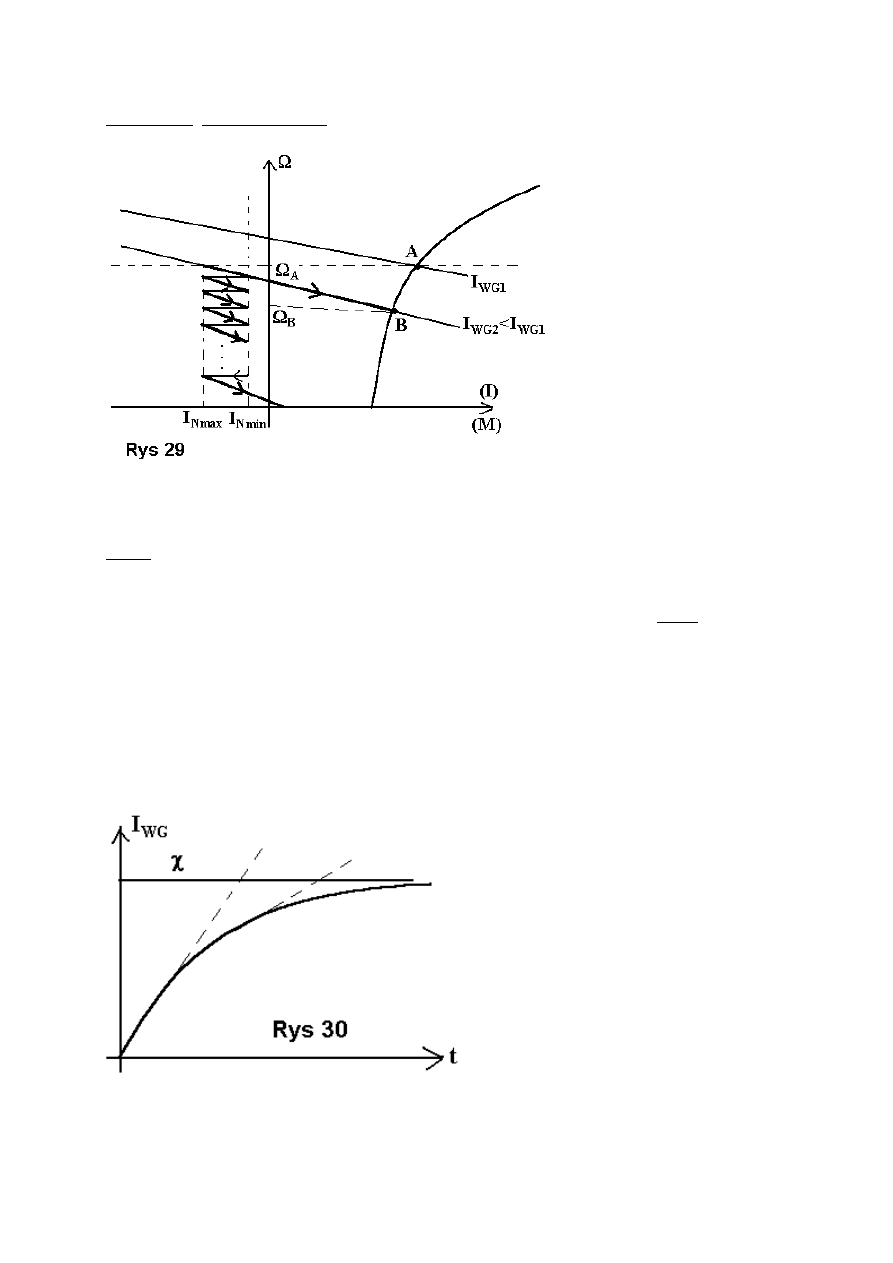
11
Hamowanie w ukł. Leonarda M=cØI
t
aby zrobić moment hamujący zmieniamy kierunek
prądu I
t
, czyli trzeba zmienić E
G.
Rys
.29. hamowanie z oddawaniem energii do sieci. W czasie normalnej pracy E
g
>E
m
przy
hamowaniu E
m
>E
g
.Nie można włączyć rezystorów do „(M3~)”aby tracić moc, bo pomimo
tego, z sieci pobierana jest moc bierna.
ZALETY I WADY UKŁADU LEONARDA.
Zalety:- płynny rozruch, nie ma dodatkowych strat; -możliwość hamowania elektrycznego, z
możliwością oddawania energi do sieci. –duży zakres regulacji prędkości pomimo większego
nachylenia charakt. –możliwość pracy nawrotnej, bez przełączeń w układzie głównym. –łatwa
mozliwośc automatyzacji układu (zwiększanie możliwości regulacji) Wady : większe
nachylenie charakterystyki mechanicznej niż przy zasilaniu silnika z sieci sztywnej –wysoki
koszt układu(duża ilość miejsca) – moc zainstalowana jest rzędu 3,5 mocy znamionowej –
stosunkowo niska sprawność rzędu 50% dla małych maszyn i 70% dla dużych maszyn –
powolnośc przebiegów przejściowych .(dlatego stosuje się forsowanie stanów przejściowych)
–tak zwane „pełzanie” silnika pod wpływem SEM dlatego w układach nienawrotnych stosuje
się wyłącznik w torze głównym pomiędzy M i G –obecność tak zwanej „strefy martwej” przy
niskich prędkościach silnika. Powoduje to prędkości pod wpływem obciążenia.
FORSOWANIE STANÓW PRZEJŚCIOWYCH.
Jeżeli U
WG
podamy skokiem to I
WG
będzie narastało wykładniczo.
Rys
.30. Dla dużych τ=3-4s a dla małych maszyn τ =0,5s a dla 3τ jest to duży czas. τ
w
=L
W
/R
W
np. 225H/450=0,5s . Forsowanie stosuje się aby przyśpieszyć stany przejściowe.
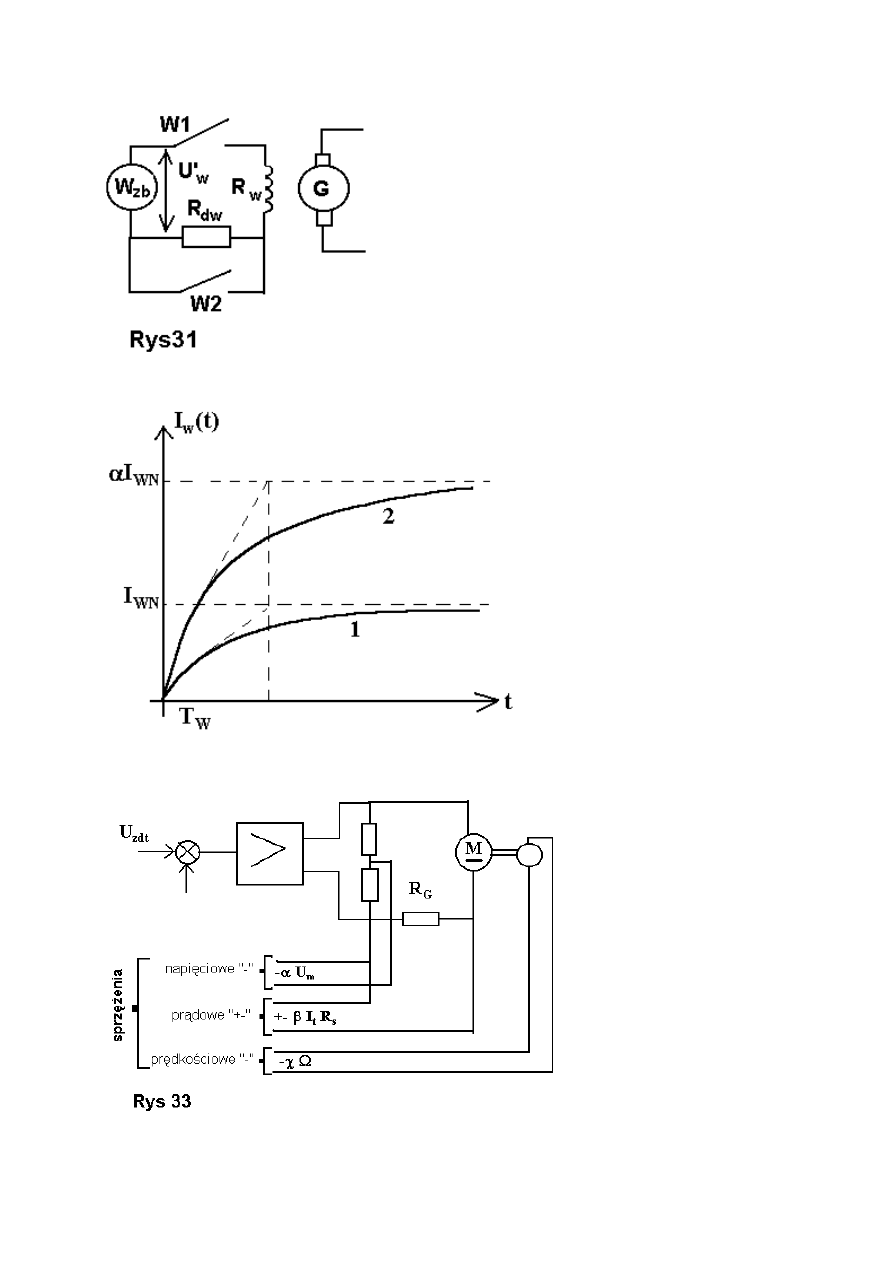
12
Rys
.31. Jeżeli zamkniemy W2 i W1 to przyłożymy do obwodu napięcie U
W
’ .
I
w
(t)=(U
w
’/R
w
)1-e
t/Tw
)=I
WN
(1-e
-t/Tw
), T
W
=L
W
/R
w
; U
W
’/R
W
= (U
W
’/U
WN
)( U
WN
/R
W
)=I
WN
,
Rys
.32. 1-włączony rezystor R
W
, 2-zwarty rezystor R
W
. t
f
=T
W
–czas forsowania ,=2, t
f
=0,69T
W
; =3 , t
f
=0,405T
W
.
ZAUTOMATYZOWANE UKŁADY NAPĘDOWE.
Rys
.33.
13
NAPIĘCIOWE SPRZĘŻENIE ZWROTNE (LEONARDA)
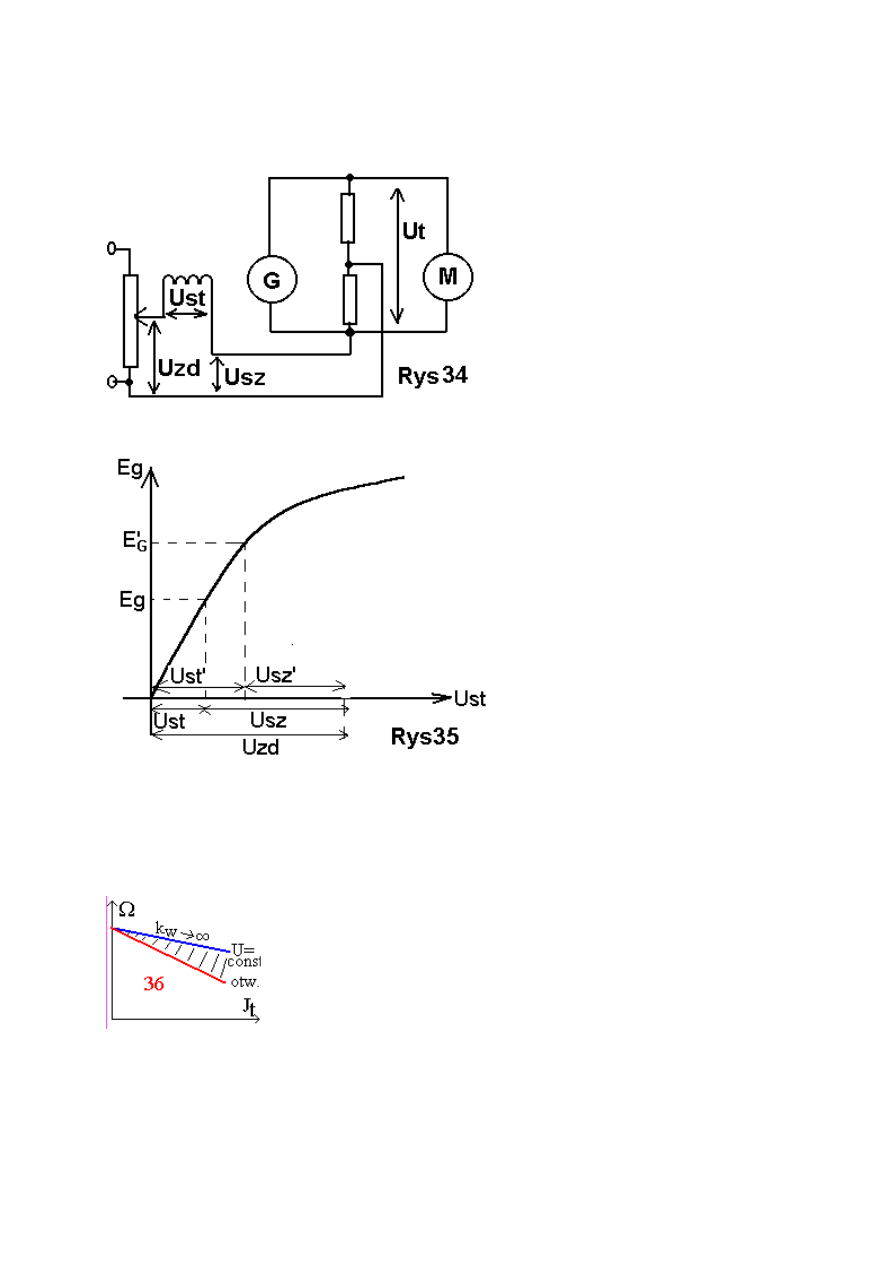
Rys
.34. U
ZD
- napięcie zadajace, U
st
- sterujące, U
SZ
- sprzężenia zwrotnego ; Re=E
G
/U
st
;
U
st
=U
zd
-U
sz
=U
zd
-U
t
; =R
2
/(R
1
+R
2
)
Rys
.35. E
g
’- zmiana obciążenia Jest to układ statyczny w stanie ustalonym U
st
≠0 Jest to
układ który stabilizuje prędkość.E
g
= k
e
U
t
= k
e
(U
2d
- U
t
); k
e
U
2d
- k
e
U
t
= U
t
+ J
t
R
G
; k
e
U
2d
–
J
t
R
G
= U
t
(1+k
e
); U
+
= E
M
-J
t
R
M
= c + J
t
R
M
; k
e
U
2d
– J
t
R
G
= (1+k
e
)( c + J
t
R
M
); k
e
U
2d
–
J
t
R
G
– J
t
R
M
(1+k
e
) = c(1+k
e
); = [k
e
U
2d
] / [c(1+k
e
)] – (J
t
/c){[R
G
/ (1+k
e
)] + R
M
} –
prędkość ukł. z napięciowym sprzężeniem zwrotnym; = U/c - (J
t
/c)R
M
dla U=const. – dla
zwykłego silnika k
w
= 1+k
e
.
Rys.
36. W rzeczywistości ukł. ma charakterystykę w zakreskowanym obszarze, Leżą one
bliżej linii otw. niż U=const. Sprzężenie napięciowe pozwala usztywnić napięcia.
UJEMNE NAPIĘCIOWE SPRZĘŻENIE ZWROTNE (LEONARDA).
14
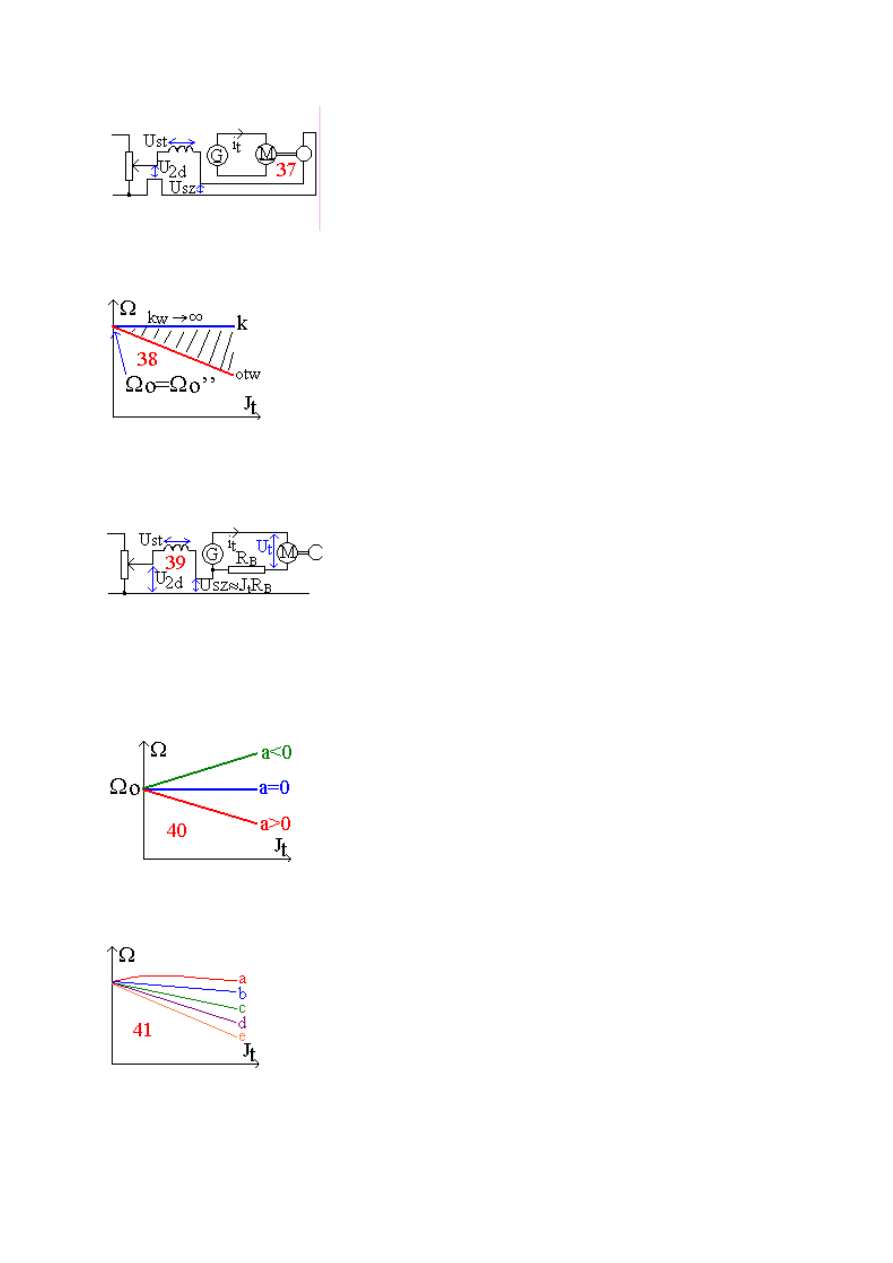
Rys
.37. E
G
= k
e
U
st
= k
e
(U
2d
- ); E
G
= U
t
– J
t
R
G
= c + J
t
(R
G
+R
M
); k
e
U
2d
= k
e
+ c +
J
t
(R
G
+R
M
); c[1 + (k
e
/ c)] = k
e
U
2d
– J
t
(R
G
+R
M
); o’’ = [k
e
U
2d
/ c(1+k
w
)] – (J
t
/
c)[(R
G
+R
M
) / (1+k
w
)]; k
w
= k
e
/ c;
otw
= (E
G
/ c) – (J
t
/ c)(R
G
+R
M
) = o -
otw
.
Rys.
38. k
e
jest rzędu kilku; - przelicznik obrotów na napięcie; c - trochę większe od 1.
Zastosowanie tego sprzężenia pozwala usztywnić char. Jest ona sztywniejsza niż przy
sprzężeniu napięciowym.
SPRZĘŻENIE PRĄDOWE W UKŁADZIE LEONARDA.
Rys.
39. Nie bierzemy pod uwagę poboru prądu przez układ wzbudzenia. J
t
zależy od
obciążenia silnika. Dodatnie sprzężenie zwrotne w ukł. Leonarda. E
G
= k
e
U
st
=
k
e
(U
2d
+R
B
J
t
); E
G
= U
t
+ (R
G
+R
B
)J
t
= c + J
t
(R
G
+R
B
+R
M
); k
e
U
st
+ k
e
R
B
J
t
= c +
J
t
(R
G
+R
B
+R
M
); = (k
e
U
st
/ c) – (J
t
/ c)[R
G
+R
B
+R
M
- R
B
k
e
], gdzie[R
G
+R
B
+R
M
- R
B
k
e
] = a.
Jeżeli a>0 – to linia opadająca; Jeżeli a=0 – to linia jest równoległa do J
t
.
Rys.
40. Układy z samym sprzężeniem prądowym mają tendencję do wzbudzania się, dlatego
tak dobiera się „a”, aby charakterystyka opadała o 2-3%. Ujemne sprzężenie zwrotne w ukł.
Leonarda. E
G
= k
e
U
st
= k
e
(U
2d
– R
B
J
t
); = (k
e
U
st
/ c) – (J
t
/ c)[R
G
+R
B
+R
M
+R
B
k
e
] –
charakterystyka jest wtedy jeszcze bardziej opadająca niż w ukł. otwartym.
Rys.
41. {a -
K
+ J; b - ; c – U=const, z sieci sztywnej; d - U
t
– napięciowe; e – układ
otwarty Leonarda}. Wszystkie przebiegi są nieliniowe. 1) k
e
= E
G
/U
st
– założenie; 2) praca na
pętli histerezy; 3) - zależy od prądu twornika.
15
ZASTOSOWANIE UJEMNEGO SPRZĘŻENIA PRĄDOWEGO.
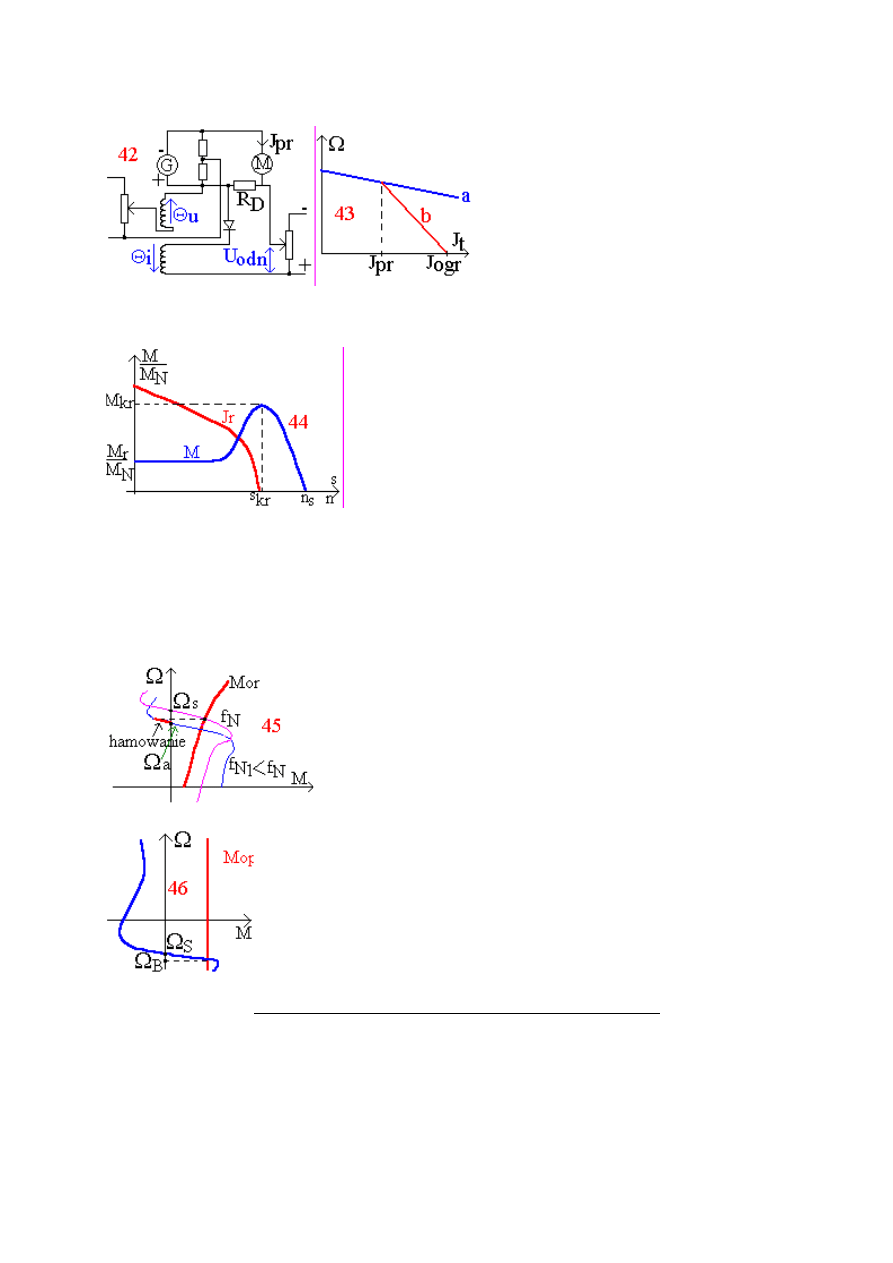
Rys.
42,43. {a – ze sprzężeniem napięciowym; b – po załączeniu sprzężenia prądowego}.
Sprzężenie zwrotne prądowe będzie załączać się wtedy, gdy popłynie Jpr.
HAMOWANIE SILINIKÓW PRĄDU PRZEMIENNEGO.
Rys.
44. M
kr
= (1,5-3)M
N
; J
r
– nawet do 8J
N
. Dla rozruchu możemy stosować przełącznik
gwiazda
–
trójkąt,
lub
autotransformatorowy.
Hamowanie:
a)
odzyskowe
(nadsynchroniczne); b) przez przeciwwłączenie; c) elektrodynamiczne (z zasilaniem uzwojeń
stojana prądem stałym); d) jednofazowe; e) trójfazowe niesymetryczne (z odwróconą fazą); f)
kondensatorowe. Hamowanie odzyskowe (nadsynchroniczne). Maszyna asynchroniczna
może działać jako prądnica, ale musi współpracować z siecią, nie może być od niej
odłączona, bo pobiera prąd bierny.
Rys.
45. {nie ma strat dodatkowych}.
Rys.
46. {hamowanie powoduje ruch ze stałą prędkością}. Hamowanie przez
przeciwwłączenie. a) zmiana wirowania pola w stosunku do prędkości. Polega ono na
względnej zmianie kierunku wirowania pola i kierunku prędkości. Żeby ograniczyć prąd w
obwodzie wkłada się rezystory dodatkowe (zmniejsza się trochę moment hamujący).
16
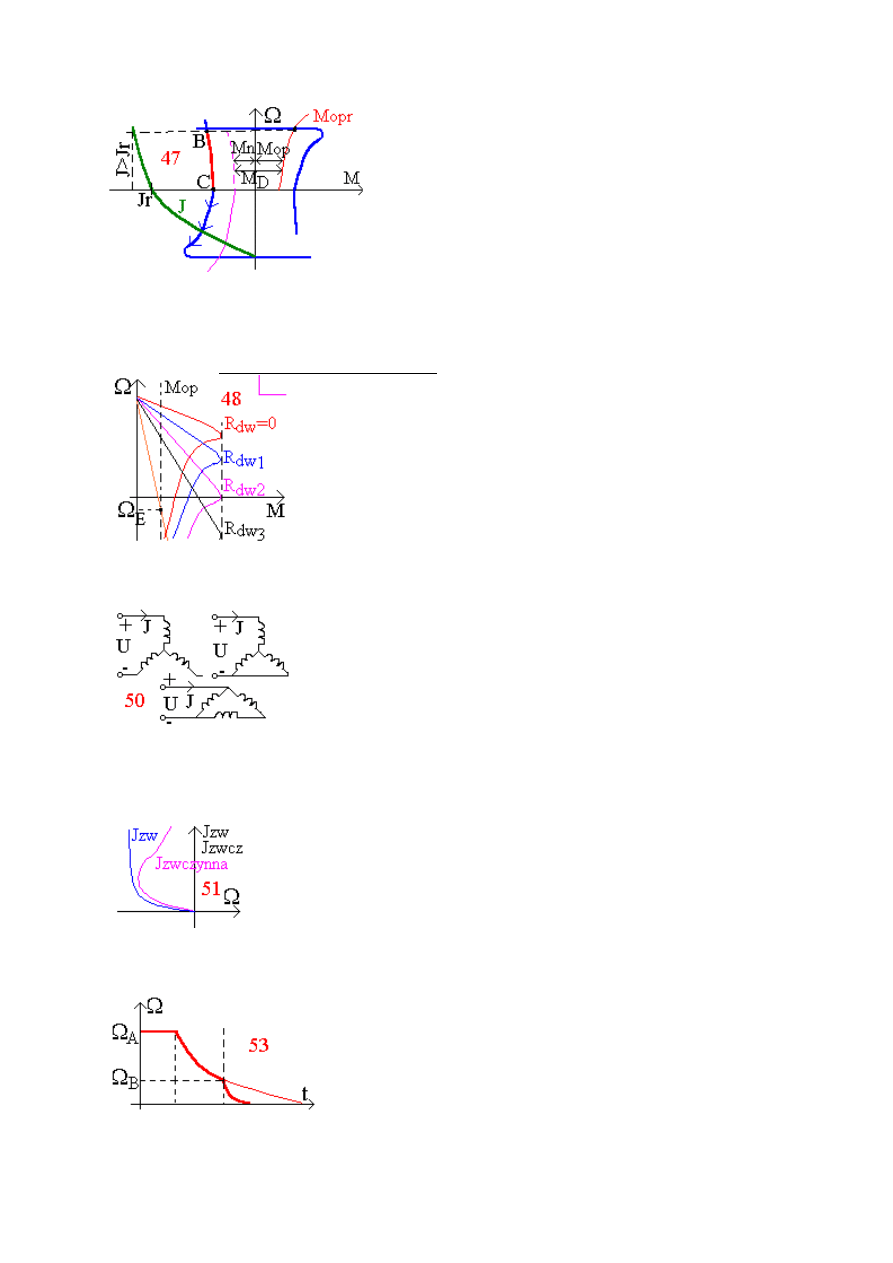
Rys.
47. {Na odcinku BC – hamowanie. Po zatrzymaniu jeżeli nie wyłączymy silnika, to
zacznie od wirować w drugą stronę}. Straty są równe 3x energii kinetycznej. Poza momentem
potencjalnym – poza wyłączeniem silnika trzeba zastosować hamulec mechaniczny w
przeciwnym razie hamowanie (opuszczanie) ciężaru z prędkością większą niż prędkość
synchroniczna. b) bez zmiany wirowania pola.
Rys.
48. {R
dw1
<R
dw2
<R
dw3
<...}. Prędkość zależy od obciążenia. Straty są równe 3x energii
kinetycznej. Hamowanie elektrodynamiczne. Polega na odłączeniu silnika od sieci i
zasileniu jego uzwojeń prądem stałym.
Rys.
50. Prąd płynący przy hamowaniu powinien być 1,2J
N
. Prąd płynący w obwodzie
zwartego wirnika (zwarty): J
ZW
= E / (R
Z
2
+X
Z
2
) = c / (R
Z
2
+X
Z
2
); X
Z
= 2fl
Z
= k; J
ZW
=
c / [R
Z
2
+(k)
2
].
Rys.
51. M
N
jest proporcjonalne do składowej czynnej J
ZW
. M = {c / [R
Z
2
+(k)
2
]}{R /
[R
Z
2
+(k)
2
]} = cR / [R
Z
2
+(k)
2
] = c / [R
Z
2
+(k)
2
]. Przebieg w czasie (hamowanie
dwustopniowe) –
Rys.
53. Hamowanie jednofazowe.
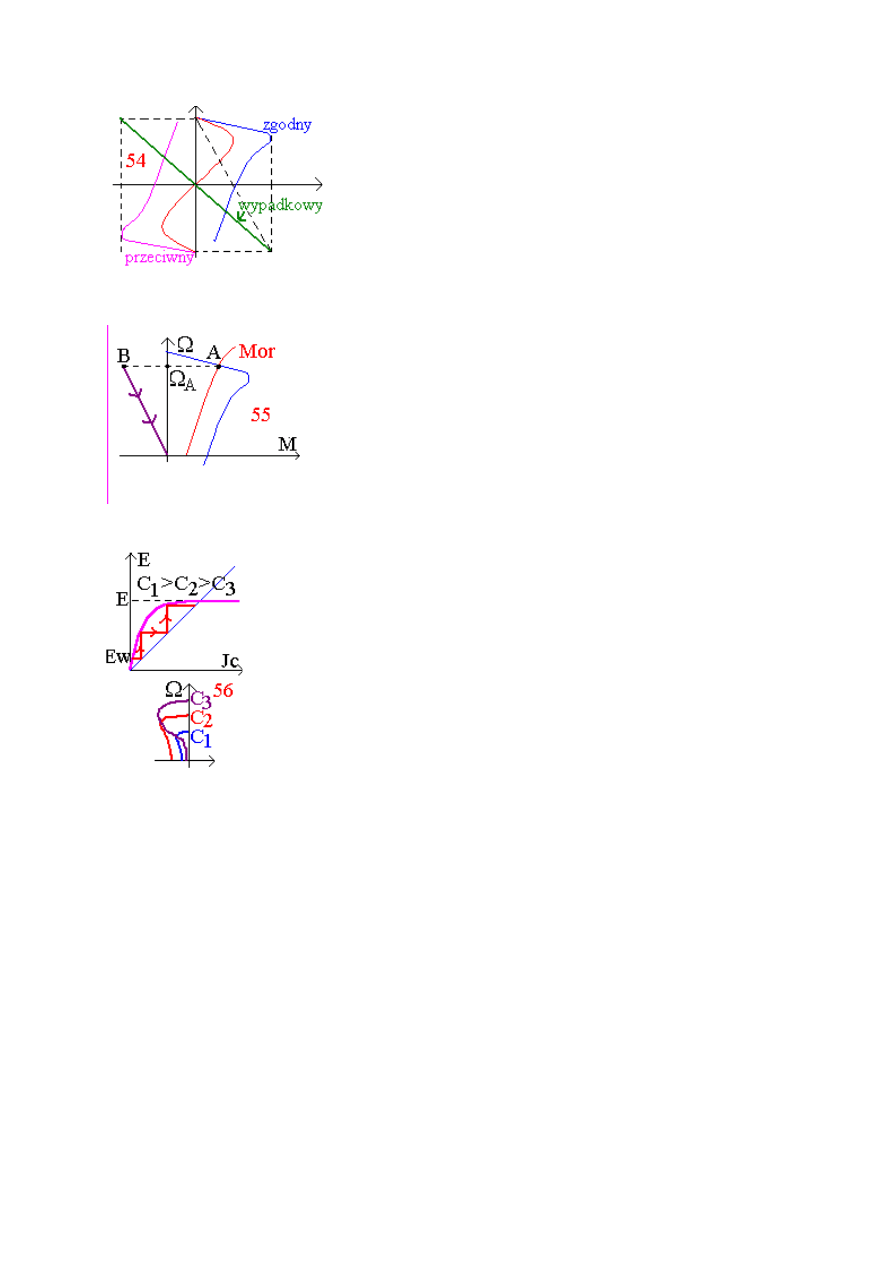
17
Rys.
54. Hamowanie to możliwe jest tylko w silnikach pierścieniowych (bo można porównać
moment krytyczny).
Rys.
55. Silnik zatrzymuje się i nie ruszy w drugą stronę. Hamowanie kondensatorowe.
Stosuje się dla silników 1 do 2 kW, 40na fazę.
Rys.
56. Jeżeli silnik asynchr. Odłączamy od sieci to strumień szczątkowy indukuje SEM 0,5
do 1,5V. Z kondensatorem jest to energia w kondensatorach i można go wzbudzać.
STEROWANIE PRĘDKOŚCIĄ SILNIKÓW ASYNCHRONICZNYCH.
=
S
(1-s)=2f/p(1-s);
S
-prędkość synchroniczna. Prędkość silników tych można zmieniać
przez: 1) zmianę częstotliwości napięcia zasilającego; 2) zmianę liczby par biegunów; 3) -
wpływanie na poślizg w celu kształtowania charakterystyk poprzez: a) -zmianę napięcia
zasilającego stojan; b) zmianę rezystancji obwodu stojana; c) zmianę reaktancji stojana
(włączenie dodatkowych dławików); d) zmianę rezystancji obwodu wirnika; e)
doprowadzenie do obwodu wirnika silnika dodatkowej SEM o odpowiedniej wartości i fazie.
=1-s; M
k
=(3U
f
^2/
S
)*(1/(2(R
1
+(R1^2+(X
1
+X
2
)^2)=k(U/f)^2 ;X=2fL. Sterowanie
prędkością przez zmianę częstotliwości napięcia zasilającego: Gdy f większe to n większe,
gdy f mniejsze to n mniejsze.
18
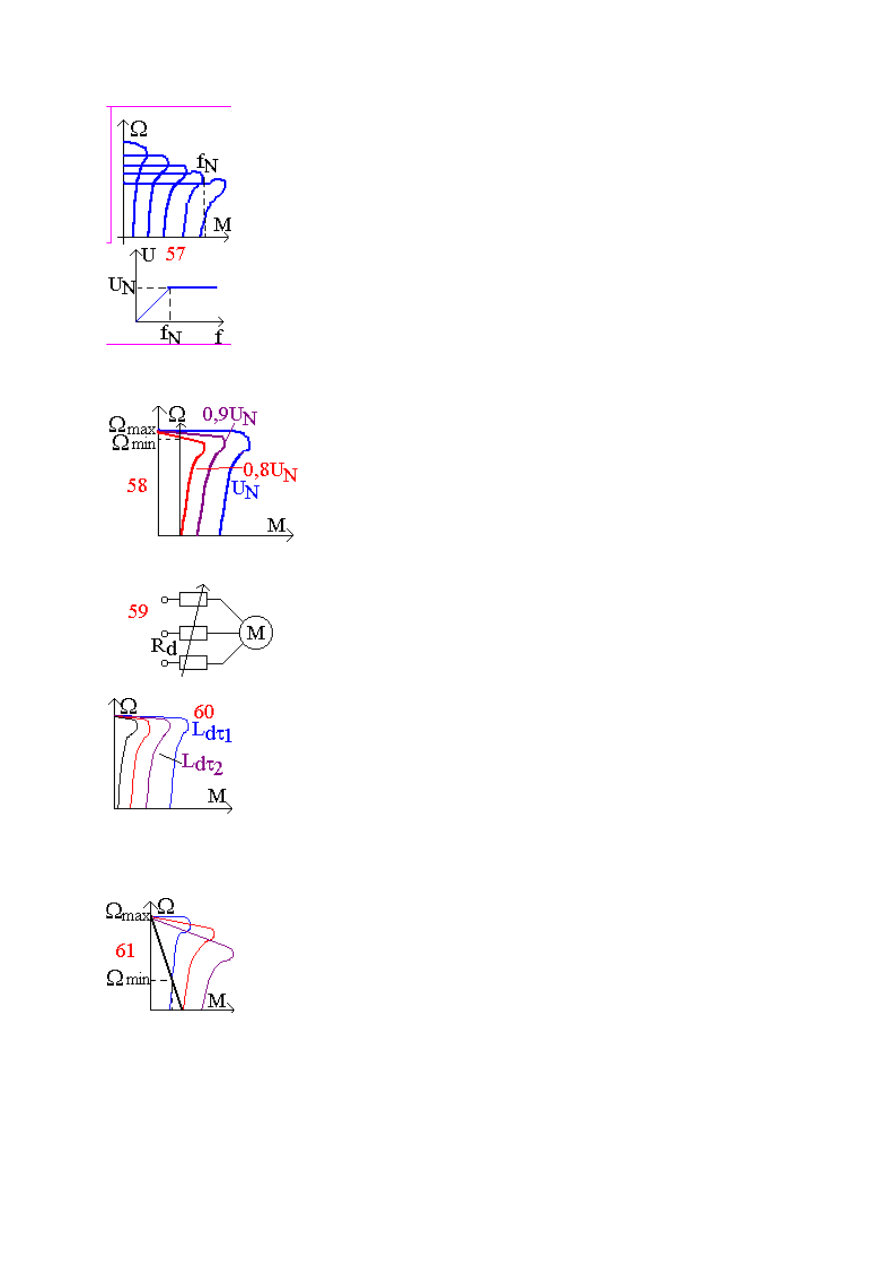
Rys.
57. Dla f <15 Hz mniejsza się również M
k
. Aby tego uniknąć stosuje się zmniejszenie
napięcia niż częstotliwości. Górna f to 80 do 100 Hz. Metoda ta pozwala na zmianę prędkości
w dół i w górę. Zmiana prędkości przez zmianę napięcia zasilania. S
k=
Rz/Xz.
Rys.
58. Włączanie rezystancji dodatkowej w obwód stojana. Zła metoda (duże straty
mocy na rezystancji).Efekt bardzo mierny.
Rys.
59. Włączanie dodatkowej indukcji w obwód wirnika.
Rys.
60. M rośnie to maleje to L
d1
maleje to U
st
maleje to U rośnie i rośnie. U
st
=U
zd
-U
tg.
Układ taki stosuje się do stabilizacji prędkości i jest stosowany do mocy 20 do 30 kW.
Zmiana prędkości przez włączenie dodatkowej rezystancji w obwód wirnika. Ze
względów energetycznych zła metoda, S
k
=(R
2
+R
d
)/X
zw.
Rys.
61. Jest to regulacja tylko w dół.
Zakres regulacji od 1 do 3 max, regulacja nie
ekonomiczna. Bardziej nadaje się do rozruchu. Ze względu na prostotę służy także do
regulacji prędkości. R
dśr
= R
w1
* t
1
/T=R
w1
*, f=300do400Hz.
Wyszukiwarka
Podobne podstrony:
NE - wykłady1, polibuda, 6 semestr, Podstawy napędów elektrycznych
DROGI ROLNICZE I LE NE Wykłady
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
Zaburzenia nerwicowe wyklad
Szkol Wykład do Or
Strategie marketingowe prezentacje wykład
Wykład 6 2009 Użytkowanie obiektu
wyklad2
wykład 3
więcej podobnych podstron