Metody, środki techniczne i zasada działania pomiaru momentu
obrotowego i mocy silnika.
Moment obrotowy – M
0
.
W warunkach stałego obciążenia moment rozwijane przez silnik tłokowy jest zmienny i
oscyluje wokół wartości średniej M
śr
– M
0
zwanej momentem obrotowym silnika .
Moment obrotowy można obliczyć z wzoru :
M
O
= 9,549296 10
3
n
N
n
N
e
e
10
55
,
9
⋅
≈
[ Nm ]
Wstawiając do powyższego wzoru N
e
= Cp
e
n , otrzymamy
M
0
=9.55
.
10
3
Cp
e
= C’p
e
[Nm]
C’ = 9.55
.
10
3
C
Z powyższej zależności wynika , że zmienność funkcji momentu obrotowego M
0
jest taka
sama , jak średniego ciśnienia efektywnego , czyli :
M
0
∼
p
e
Moment obrotowy silnika można zmierzyć hamulcem , zwykle wodnym lub
momentomierzem ( torsjomierzem ) .
Pomiar momentu obrotowego hamulcem stosuje się tylko na stacjach prób w wytwornicach
W warunkach statkowych pomiar momentu obrotowego wykonuje się przy pomocy
torsjometru lub dla silników zespołów prądotwórczych wyznacza się na podstawie pomiaru
mocy elektrycznej.
Zasada działania torsjometru polega na pomiarze kąta skręcania wału
ϕ
lub
naprężeń stycznych
τ
, powstałych w wale w wyniku jego skręcenia . Zarówno kąt skręcenia
, jak i naprężenia styczne są wprost proporcjonalne do momentu skręcającego wał , czyli do
momentu obrotowego M
0
.
Zależność kąta skręcania do momentu skręcającego wyraża wzór :
ϕ
=
o
o
GI
l
M
⋅
[ rad ]
M
0
– moment skręcający [Nm]
l - długość skręcanego odcinka wału [m]
G – moduł sprężystości postaciowej wału [N/ m
2
]
I
0
– biegunowy moment przekroju skręcanego [m
4
]
Podstawiając za iloraz GI
0
/ l
wielkość s , zwaną wielkością skrętną wału możemy zapisać :
M
0
= s
ϕ
[Nm]
Zależność momentu M
0
od naprężeń stycznych
τ
[N/ m
2
] można zapisać :
M
0
= W
0
τ
[Nm]
W
0
– wskaźnik wytrzymałości na skręcanie badanego odcinka wału o średnicy d
16
d
W
o
Π
=
[ m
3
]
Rysunek ilustruje zasadę działania torsjometru działającego w oparciu o pomiar
przesunięcia fazowego emitowanego sygnału . W układzie tym dwa koła zębate ,
zamocowane na wale w określonej odległości , są źródłem sygnału odbieranego przez
detektor fazowy , wskazujący czas przerw i przesunięcia fazowe między wzbudzonymi
przez oba koła sygnałami . Przesunięcie fazowe jest wprost proporcjonalne do kąta
skręcenia pomiarowego odcinka wału , a zatem także do momentu skręcającego .
Wał.
Koła
zębate.
Długość
pomiarowa
Detektor
fazowy.
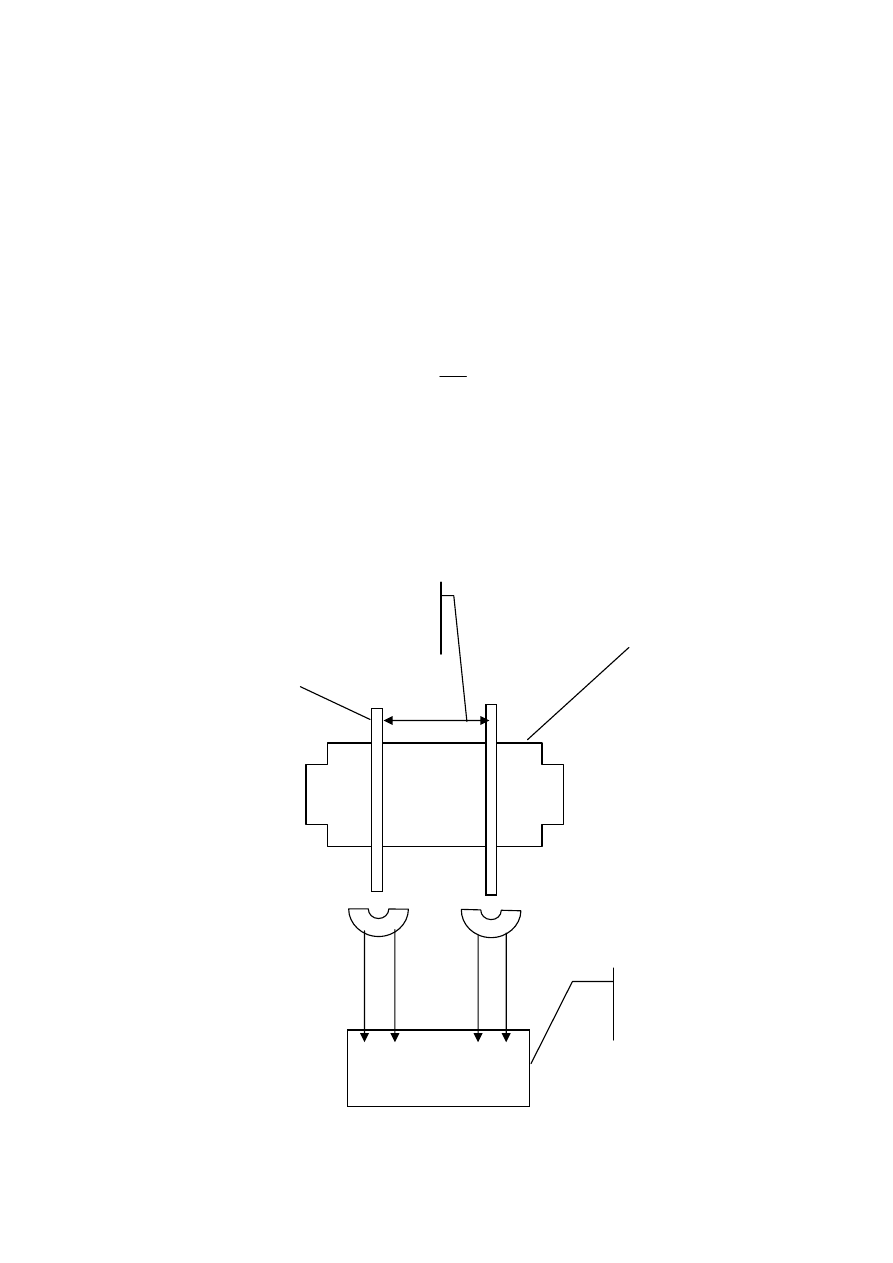
W nowoczesnych siłowniach stosuje się mikroprocesorowe urządzenia do pomiaru
momentu , którego przykład ilustruje poniższy rysunek . Jest to torsjometr produkowany w
Wyższej Szkole Morskiej w Gdyni , którego zasada działania polega na
fotooptycznym pomiarze kąta skręcenia wału . Urządzenie to składa się z nadajnika -
dwóch tarcz zębatych 1 i 2 zamontowanych na wale w odległości L , fotooptycznej głowicy
pomiarowej oraz układu mikroprocesorów .
Wzajemne położenie tarcz , gdy wał nie jest skręcany , obrazuje poniższy rysunek . W tym
stanie szerokość wrębów ( prześwitów ) między zębami tarczy są sobie równe ( a=b ) .
Obciążenie wału momentem M > 0 powoduje względne przesunięcie zębów obu tarcz i
zmianę szerokości prześwitów a’ > b’ . Pomiar momentu polega na pomiarze różnicy
czasów trwania dwóch kolejnych impulsów proporcjonalnych do chwilowych prześwitów
pomiędzy zębami tarczy . Obróbka sygnału następuje w elektronicznej części
momentonierza z 8-bitowym procesorem .
Moc silnika.
Praca wykonana przez czynnik roboczy nazywa się pracą indykowaną L
i
, a
odpowiadającą tej pracy moc-mocą indykowaną N
i
. Każdy silnik zużywa część
wyprodukowanej przez siebie energii mechanicznej na potrzeby własne, zwłaszcza na
pokonywanie oporów ruchu i napędu mechanizmów własnych. Pracę indykowaną,
pomniejszoną o pracę na własne potrzeby, nazywa się pracą efektywną L
e
, a
odpowiadającą jej moc-mocą efektywną N
e
.
Moc indykowana jest mocą, jaką w ustalonych warunkach pracy rozwija czynnik roboczy w
przestrzeniach roboczych silnika.
Moc indykowaną wielocylindrowego silnika oblicza się jako sumę mocy indykowanej
poszczegulnych cylindrów. Moc jednego cylindra wynosi:
τ
1000
1
i
i
L
N
=
[ kW ]
L
i
– praca indykowana cylindra [ J ]
τ
- czas wykonania pracy [ s ]
Pracę wykonaną podczas jednego cyklu roboczego oblicza się według zależności :
L
i
= F
t
p
i
S = V
s
p
i
[ J ]
V
s
– objętość skokowa [ m
3
]
s – skok tłoka [ m ]
F
t
– powierzchnia tłoka [ m
2
]
p
i
– średnie ciśnienie indykowane [ N/ m
2
] , [ Pa ]

Dla danego silnika wyrażenie:
c
z
V
Sz
F
s
t
=
⋅
=
⋅
10
60
10
60
jest wartością stałą, a a wielkoąć c nazywa się stałą cylindra. Uwzględniając ostatnią
wielkość, wzór na moc indykowaną cylindra można napisać w postaci najwygodniejszej dla
obliczeń praktycznych.
N
1i
= c p
i
n [ kW ]
Moc indykowaną N
i
silnika i cylindrowego oblicza się jako sumę mocy indykowanej
poszczególnych cylindrów:
N
i
= N
1i
+ N
2i
+ N
3i
+ .....+ N
ii
Wyszukiwarka
Podobne podstrony:
213 URZĄDZENIE DO POMIARU MOMENTU OBROTOWEGO UPM 100M
Moment obrotowy silnika
4 5 Moment obrotowy silnika
zawieszenie silnka przenoszenie momentu obrotowego
Ćw 4 Pomiary prędkości obrotowej
Wzmacniacz momentu obrotowego Ursus
cw3 tensometryczne pomiary momentu skrecajacego
POMIAR MOMENTÓW SIŁ MIĘŚNIOWYCH
POMIARY PRĘDKOŚCI OBROTOWEJ, obroty-sc, 18
biomechanika, Pomiar momentów sił wybranych grup mięśniowych w statyce, Pomiar momentów sił wybranyc
POMIAR MOMENTU ŻYROSKOPOWEGO
Pomiary momentów sił mięśniowych w warunkach izokinetycznych, Studia, Studia sem III, Uczelnia
Pomiar predkosci obrotowej, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
STANOWISKO 3 - POMIAR PRĘDKOŚCI OBROTOWEJ, KONSPEKT
Pomiar momentów sił mięśniowych w warunkach statyki
Pomiar prędkości obrotowej
24d ?danie zależności momentu obrotowego
pomiar tech du mocy i mikr
Pomiar ha asu i mocy akustycznej
więcej podobnych podstron