Sterowniki PLC/PAC
Uwagi wstęne
-Sterowniki PLC/PAC są jednymi z najczęściej stosowanych w
przemyśle cyfrwych urządzeń sterujących
-Skróty nazw oznaczają Programmable Logic Controller i
Programmable Automation Controller
-Pod względem konstrukcyjnym obie wersje nie różnią się między
sobą nazwa PAC jest raczej chwytem marketingowym i oznacza PLC
o większych możliwościach obliczeniowych i platformą programową
o większej otwartości.
-Sterowniki PLC pierwotnie były dedykowane wyłącznie do realizacji
sterowania logicznego , obecnie (zwłaszcza wersje PAC) są w stanie
realizować większość zadań sterowania za wyjątkiem sterowania
numerycznego i robotyki.
-Kostrukcja i zasady programowania sterowników PLC są
znormalizowane.
Generalne założenia dotyczące systemów PLC:
-Łatwe programowanie i rekonfiguracja(sprzętowa i programowa) w
zależności od potrzeb.
-Konstrukcja modułowa i łatwość napraw i utrzymania w ruchu
poprzez wymianę modułów
-Wyższa niezawodność mniejsze wymiary i pobór energii niż systemy
przekaźnikowe
-Cena porównywalna ze sprzętem przekaźnikowym
Uwagi
-Konfiguracja jest budowana z modułów ściśle pod kątem wymagań
określonej aplikacji
-W ramach jednej "rodziny" sterowników jest dostępna duża liczba
różnych modułów o różnych możliwościach i cenie
-Lokalizacja modułów na szynie jest ściśle okreslona i determinuje
np. Ich adresy
-W praktyce często stosowana jest konfiguracja rozproszona, gdy
moduły sygnałowe są połaczone z CPU za pośrednictwem sieci.
Podstawowe typy modułów sterownika PLC:
-Zasilacze
-jednostki centralne (CPU)
-moduły komunikacyjne np ETHERNET
-moduły sygnałów procesowych:(wejścia binarne, analogowe, wyjścia
binarne, analogowe)
-Specjalizowane moduły "inteligentne" z własnymi procesami i
układami wejść i wyjśc np.:pozyjonowanie osi ,regulacja temperatury
Dodatkowe elementów PLC:
Panele operatorskie – są to autonomiczne elementy o różnej
funkcjonalności od prostej aż do bardzo rozbudowanej. Te bardziej
rozbudowane pracują np pod windowsami ce i mogą być platformą
sprzętową dla aplikacji SCADA i stopnia nadrzędnego.
Sieć przemysłowa:
-Do połączenia rozproszonej konfiguracji pojedynczego PLC
-do połączenia sterownika PLC z innymi elementami systemu(np
komputer)
-sieć przemysłowa może siędość znacznie różnic od ETHERNETU
Kompaktowy sterownik "hard PLC". Cechy:
-W jednej obudowie jest CPU zasilacz i zespół wejści wyjśc
-rozwiązanie dedykowane do prostszych aplikacji i tańsze niż
sterownik modułowy
-większość sterowników kompaktowych ma możliwość rozbudowy o
dodatkowe wejścia i wyjścia.
System sterowania "soft PLC"
Idea:Interfejs procesowy oraz metody programowania są te same co
dla systemu hard plc.; Jednostka centralna jest zrealizowana
wirtualnie pod nadzorem systemu WINDOWS
Zalety:Znacznie większa moc obliczeniowa w stosunku do systemu
hard PLC; intergracja na jednej platformie sprzętowo-programowej
systemu SCADA i CPU sterownika(i ew. Środowiska
konfiguracyjnego)
Wady:Praca pod nadzorem systemu WINDOWS (zawodność
działania)
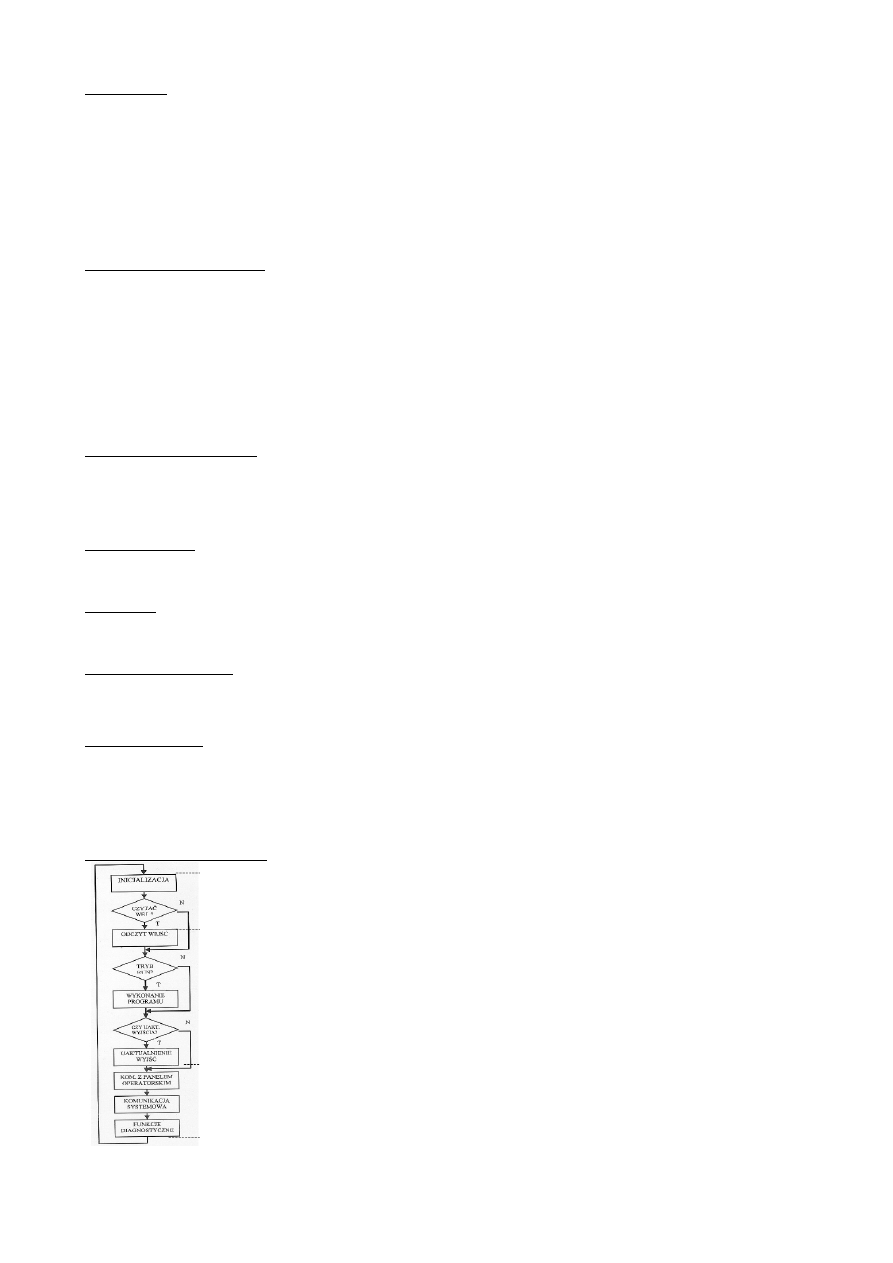
Cykl programowy PLC i regulatora cyfrowego:
od „odczyt wejść” do „uaktualnienie wejść”: czas odpowiedzi T
0
od początku do końca: czas cyklu Ts
Czas cyklu ( ang. Cycle Time, Scan Time) Ts Jest to czas trwania 1
cyklu programowego, od inicjalizacji do diagnostyki.
Czas odpowiedzi ( ang. Response Time) To Jest to czas od odczytu
wejścia do zapisu skojarzonego z tym wejściem wyjścia.
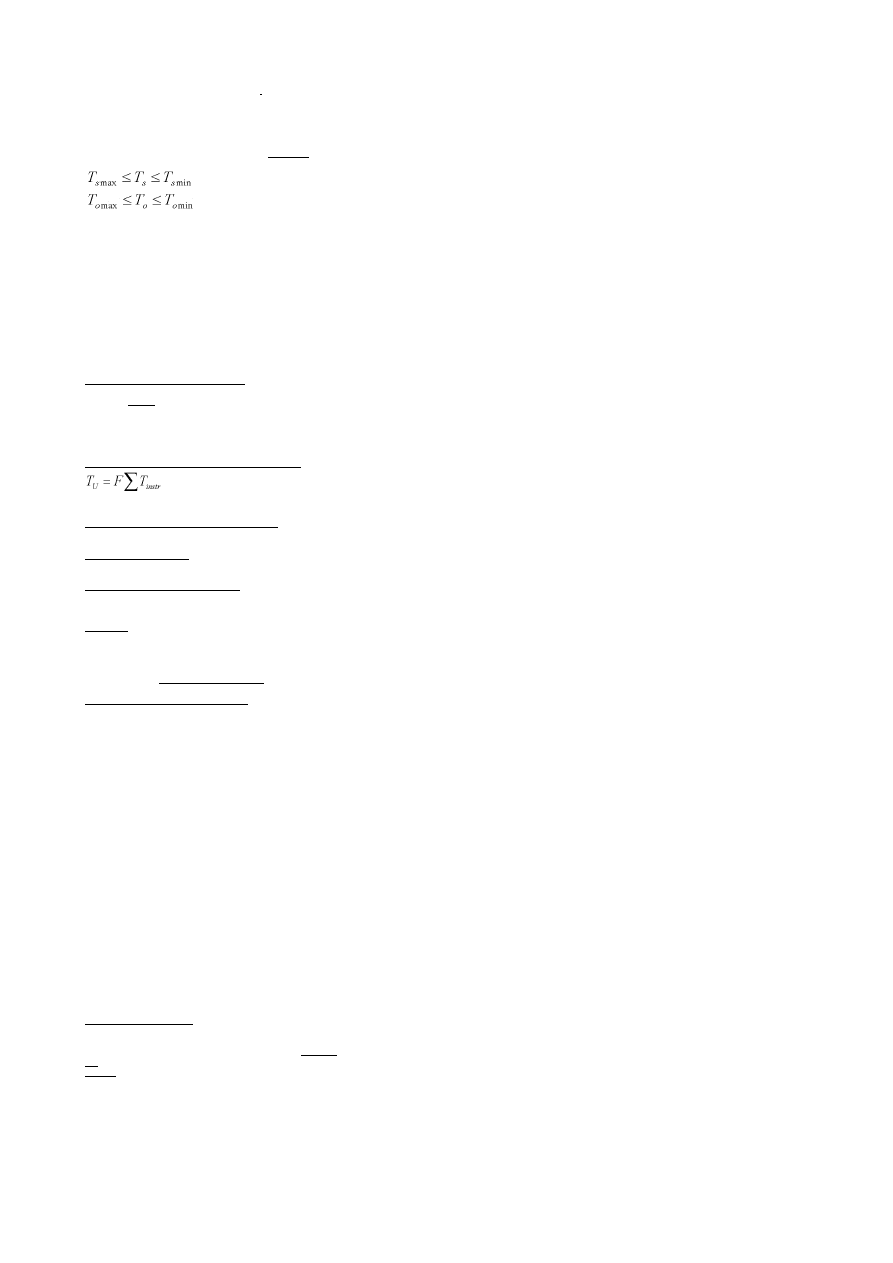
Podczas pracy sterownika wartości Ts oraz To nie są stałe, lecz
zmieniają się w pewnym zakresie i można jedynie oszacować ich
minimalne i maksymalne wartości:
Dokładność zależy od oszacowań producenta
W przypadku regulatorów PID i innych prostych urządzeń nie mamy
wpływu na wartość Ts oraz To, natomiast mamy wpływ na te
parametry i mogą one być szacowane oraz mierzone w przypadku
systemów PLC.
Przykład szacowania wartości To dla sterownika PLC (SIEMENS):
T
omin
=T
R
+Tos+Tu+Tw+T
Di
+T
Do+
T
T
T
omax
=2T
R
+2Tos+2Tu+2Tw+T
Di
+T
Do+
T
T
+2T
DP
TR – czas odczytu wejść,Tos -czas wykonania systemu
operacyjnego,Tu – czas wykonania programu użytkownika,TW – czas
zapisu wyjść,TDi –czas opóźnienia wejść,TDo –czas opóźnienia
wyjść,
Oszacowanie czasu obsługi wejść i wyjść:
T
R
+T
W
=K+A*LB
0
+B*LB
1%3
+D*LB
DP
LB – liczba bajtów czytanych lub zapisywanych:
0 – na szynie 0,
1-3 – na szynach 1 – 3,
DP- w układach rozproszonych wejść /wyjść
K, A, B, D - stałe, równe w przypadku CPU 315 SIEMENS SIMATIC
S7 300: K = 109 [us] , A= 10.6 [us] , B = 12.6 [us] , D = 10 [us] .
Oszacowanie czasu wykonania programu użytkownika:
F = 1.15 ( dla CPU 315 )
Tinstr – czasy wykonania wszystkich instrukcji programu
Czas wykonania pojedynczej instrukcji programu jest
zdeterminowany przez: Typ CPU;Typ instrukcji;typ danych na jakich
ta insrukcja jest wykonana
Czasy wykonania timerów:
T
T
=8n; n = ilość timerów użytych w programie
WNIOSKI ( tylko system „Hard-PLC”):
-Operacje wykonywane na danych typu DINT są znacznie szybsze,
niż na danych typu REAL, przy tej samej precyzji.
-W przypadku wysokich wymagań dot czasu cyklu należy pamiętać o
wyłączaniu nie używanych wejść i wyjść,
-Sterownik „hard PLC” nie nadaje się do realizacji zadań sterowania
numerycznego i robotyki, gdyż te zadania wymagają wykonywania
dużej ilości szybkich obliczeń z użyciem funkcji trygonometrycznych.
-Oszacowania podawane przez producenta sprzętu są zwykle bardzo
„ostrożne” i opisują najgorsze możliwe przypadki.
Zasady programowania sterowników PLC
Ogólne zasady programowania opisane w normie:
-Model i elementy oprogramowania
-typy danych
-typy zmiennych
-języki i metody programowania
Zasady nieomówione (zleżne od systemu sprzętu)
-zasady adresacji
-"nieformalne" elementy oprogramowania
-metody implementacji niektórych elementów
Konfiguracja – element na najwyższym poziomie jest to całość
oprogramowania sterownika determinująca jego pracę. Obejmuje
zarówno OS jak i program użytkownia
Zasób – Element opisujący platformę sprzętową do realizacji
programu. Program aby był wykonywalny musi być załadowany do
zasobu np symulator PLC jest symulatorem zasobu.
Program – Jest to logiczne połączenie wszystkich elementów
konstrukcji potrzebnych do założonego przetworzenia sygnałów
wymaganego do sterowania maszyny lub procesu przez system PLC
Zadanie – Element nadzorujący wykonanie programu lub pewnej
jego logicznej całości
Blok funkcyjny - element dynamiczny o wielu wejściach i wyjściach
-bloki funkcyjne są podstawowym narzędziem programowania
obiektowego systemów PLC
-wyjścia bloku są zdeterminowane zarówno przez wejścia jak i przez
historię działania bloku (część zmiennych jest zapamiętywana z
poprzednich wywołań)
-"na zewnątrz" bloku są dostępne wyłącznie zmienne wejśiowe i
wyjśiowe a nie są dostępne zmienne wewnętrzne
Standardowe bloki funkcyjne są częścią firmware’u sterownika i są
dostępne w każdym systemie PLC:-elementy bistabilne,-elementy
detekcji zbocza,-liczniki,-timery.
Niektóre (nie wszystkie systemy PLC umożliwiają budowę własnych
FB podczas budowy oprogramowania.
Funkcja Element statyczny o wielu wejściach i zwracający jedną
wartość określonego typu.
-Funkcyjne są również podstawowym narzędziem programowania
obiektowego systemów PLC
-Wartość wyjścia funkcji jest zdeterminowana wyłącznie przez
wartość jej wejść (funkcja nie posiada „pamięci”).
-„na zewnątrz” funkcji są dostępne wyłącznie zmienne wejściowe i jej
wyjście, a nie są dostępne zmienne wewnętrzne

W każdym systemie PLC dostępny jest dość duży zestaw funkcji
standardowych
-funkcje konwersji typu,
-funkcje arytmetyczne i matematyczne,
-funkcje porównania,
-funkcje wyboru,
-funkcje operujące na danych typu STRING,
-funkcje operujące na danych typu czasowego,
Niektóre (nie wszystkie) systemy PLC umożliwiają budowę własnych
funkcji podczas budowy oprogramowania.
Zmienna globalna -Zmienna dostępna dla wszystkich elementów
programu, zasobu lub konfiguracji.
-Zmienne globalne umożliwiają szybką wymianę danych w obrębie
programu,
-Zaburzona jest sekwencyjność wykonania programu,
-„Dobre narzędzie do budowy zupełnie niezrozumiałych programów”,
-Szczegóły definiowania i stosowania zależne są od konkretnego
systemu.
Zmienna bezpośrednio reprezentowana -Zmienna, której nazwą jest
adres(wejścia, wyjścia lub komórki pamięci wewnętrznej).
Zasady adresacji są zależne od systemu i pomimo ogólnych
podobieństw różnią się pomiędzy sobą.
Przykładowo: adresy wejścia binarnego w 3 systemach:
SIEMENS: 10.0, GEFANUC: %l1, ALLEN_BRADLEY: l1:0.0/0
Ścieżka dostępu –Element oprogramowania zapaeniający wymianę
danych z innymi konfiguracjami lub konfiguracją a innym
elementem(np. systemem SCADA)
Wyszukiwarka
Podobne podstrony:
MO4
mo4 wykladyjj
examples mo4
mo4 id 304437 Nieznany
mo4
tutorial MO4
mo4 wykladyJJ
MO4
mo4
więcej podobnych podstron