
Roboty Przemysłowe
Roboty Inspekcyjne
Błażej Penczek
Daniel Frys
Daniel Kot

Krótka Historia
• Pojęcie "ROBOT" w literaturze wystąpiło po raz pierwszy w sztuce czeskiego
pisarza Karel'a Ĉapka (1890-1938) R.U.R (Rossum's Universal Robots) w roku
1920. Słowo "robot" oznacza w języku czeskim pracę lub służbę przymusową.
• W roku 1942 Isaac Assimov w krótkim opowiadaniu "Runaround" po raz pierwszy
użył słowa robotyka. W kolejnych latach Assimov w swoich utworach
niejednokrotnie poruszał tematy robotyki w roku 1950 wydał zbiór opowiadań
pod tytułem "Ja, robot". Assimov wprowadził także trzy prawa robotyki, według
których, jak uważa autor, powinny być programowane roboty:
•
• Prawo zerowe: Robot nie może szkodzić ludzkości, ani nie może, przez
zaniedbanie, narazić ludzkości na szkodę.
• Prawo pierwsze: Robot nie może zranić istoty ludzkiej, ani nie może przez
zaniedbanie narazić człowieka na zranienie, chyba, że narusza to prawo o
wyższym priorytecie.
• Prawo drugie: Robot musi spełniać polecenia wydawane przez człowieka,
poza poleceniami sprzecznymi z prawami o wyższym priorytecie.
• Prawo trzecie: Robot musi chronić samego siebie dopóki dopóty nie jest to
sprzeczne z prawem o wyższym priorytecie.
Pierwsze roboty przemysłowe
• Po gwałtownym rozwoju techniki w czasie drugiej wojny światowej
w 1956 roku GeorgeDevol i Joseph Engelberger rozmawiając o
twórczości Assimov'a postanowili stworzyć działający egzemplarz
robota. Engelberger założył firmę "UNIMATION" zajmującą się
automatyzacją w szerokim tego słowa znaczeniu i będącą pierwszą
firmą produkującą roboty.
• Pierwszym robotem stworzonym przez "Unimation" był robot
nazwany "UNIMATE". W wyniku tego Engelberger został nazwany
ojcem robotyki.
• Pierwszy Unimate zainstalowany został w fabryce General Motors w
Trenton przy obsłudze wysokociśnieniowej maszyny odlewniczej, w
kolejnych latach roboty Unimate zostały przystosowane do pracy
także w innych gałęziach przemysłu. Firma Unimate do dzisiaj
produkuje roboty przemysłowe.
Robot
• Urządzenie mechaniczne
wyposażone w napęd i układ
sterowania, które może być
zaprogramowane do
automatycznego wykonania
różnorodnych operacji.
Generacje Robotów
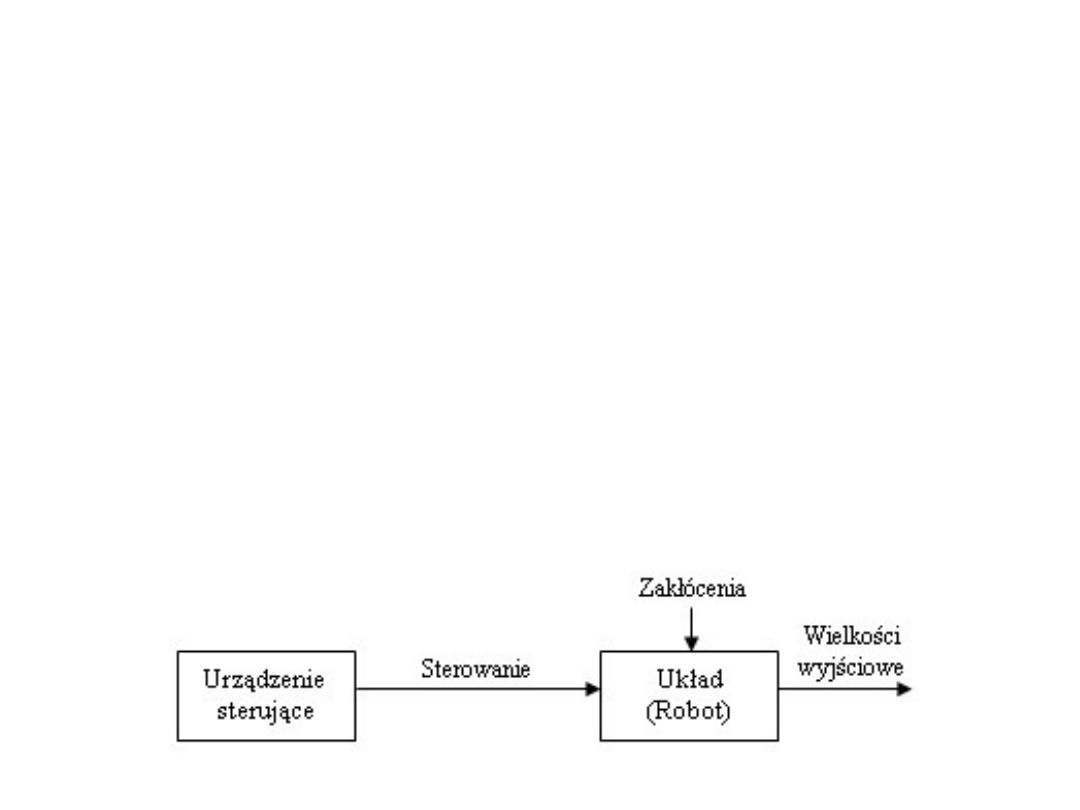
• Roboty I generacji to roboty
zaprogramowane najczęściej na określoną
sekwencję czynności (istnieje możliwość ich
przeprogramowania). W robotach tej generacji
stosowano przeważnie otwarty układ
sterowania tak więc robot charakteryzuje się
całkowitym brakiem sprzężenia zwrotnego od
stanu manipulowanego przedmiotu.
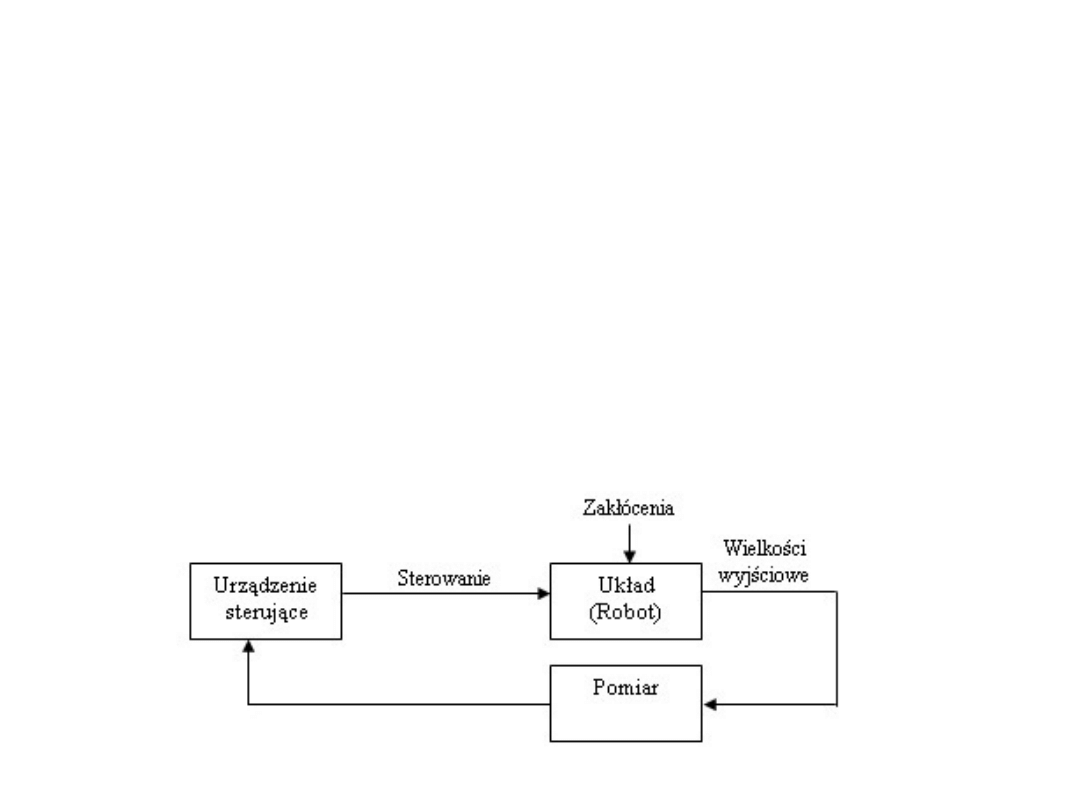
• Roboty II generacji to roboty wyposażone w
zamknięty układ sterowania oraz czujniki pozwalające
dokonywać pomiarów podstawowych parametrów stanu
robota i otoczenia. Roboty II generacji powinny
spełniają warunek takiej taktyki przy kontakcie ze
światem zewnętrznym, aby uzyskać optymalny efekt
działania. Robot powinien rozpoznawać żądany obiekt
nawet wówczas, gdy przemieszcza się z innymi
obiektami, następnie rozpoznać ten obiekt bez względu
na jego położenie i kształt geometryczny. Takie roboty
realizują te wymagania za pomocą zespołu czujników.

• Roboty III generacji to roboty typu ręka-oko
(rozpoznawanie obiektów). Schemat układu
sterowania dla robotów III generacji jest taki sam
jak dla robotów II generacji. W tym układzie
informacja o otoczeniu jest odbierana za pomocą
sensorów wizyjnych oraz przekazywana do
komputera, co umożliwia, przy znajomości modeli
kinematyki i dynamiki manipulatora oraz
kryterium sterowania, realizację zaplanowanego
zadania, np. zadanej trajektorii.

Zastosowanie:
Roboty przemysłowe są stosowane w
operacjach:
• Manipulacyjnych,
• Technologicznych,
• Montażowych
• Inspekcyjnych
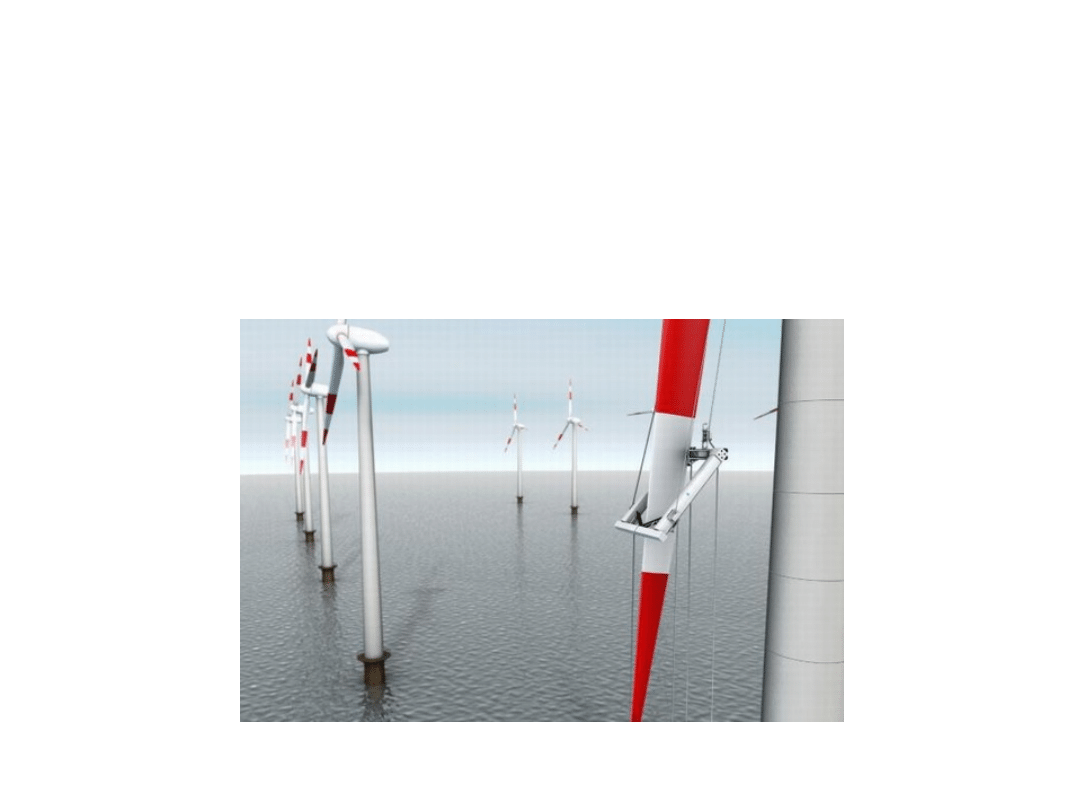
Robot RIEWA
• Inspekcja łopat wirnika elektrowni
wiatrowych
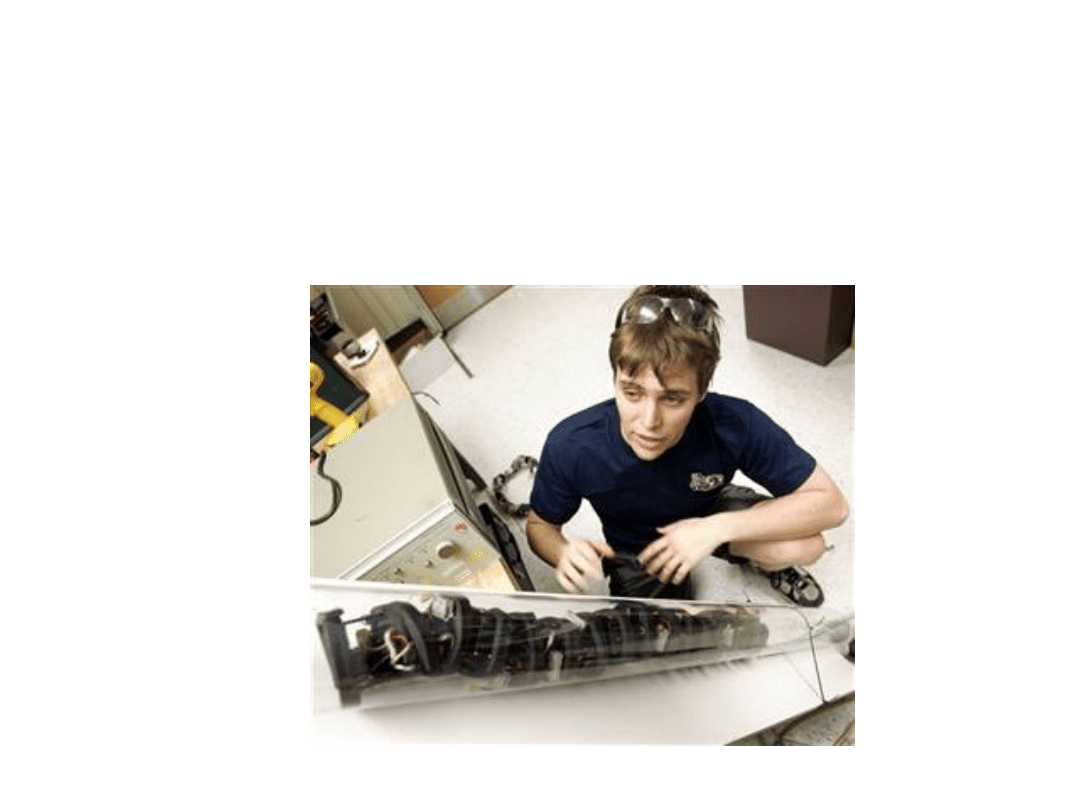
Robot wąż
• Przeczesywanie trudnych terenów
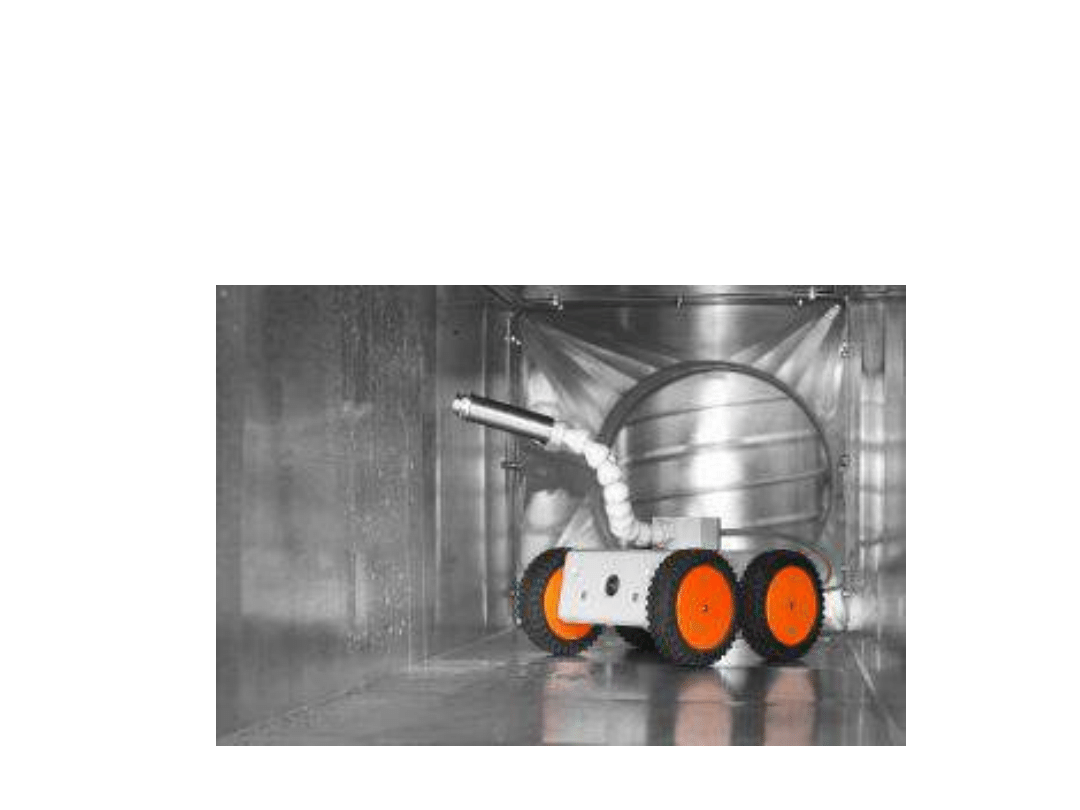
Robot VENTO
• inspekcja kanałów wentylacyjnych

Robot Wizard
• inspekcja systemów
klimatyzacyjnych
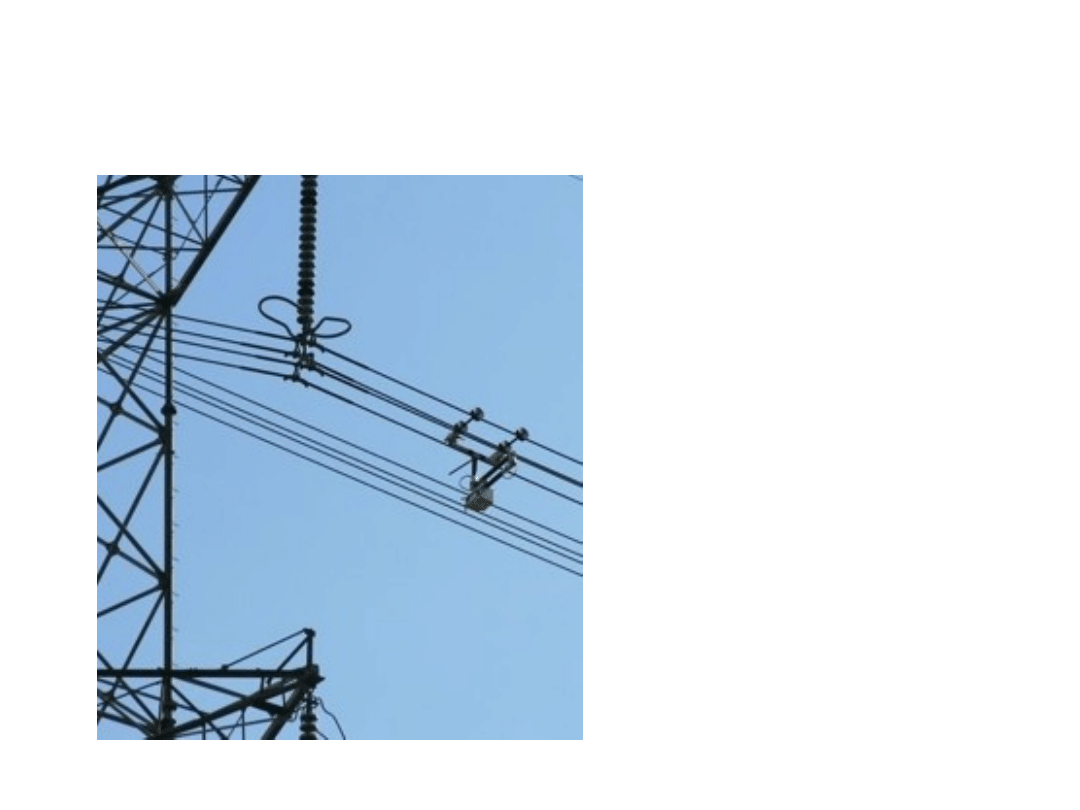
Roboty dokonujące inspekcji linii
wysokiego napięcia

Robot do inspekcji turbin wiatrowych

KONIEC
Document Outline
- Slide 1
- Krótka Historia
- Pierwsze roboty przemysłowe
- Robot
- Generacje Robotów
- Slide 6
- Slide 7
- Zastosowanie:
- Robot RIEWA
- Robot wąż
- Robot VENTO
- Robot Wizard
- Roboty dokonujące inspekcji linii wysokiego napięcia
- Robot do inspekcji turbin wiatrowych
- KONIEC
Wyszukiwarka
Podobne podstrony:
MANIPULATORY I ROBOTY PRZEMYSŁOWE, Logistyka, Przydatne materiały
PRACA PRZEJŚCIOWA Robotyzacja w przemyśle
Instrukcja do ćw 09 Roboty przemysłowe Programowanie robota
Roboty przemysłowe wstęp uzup
Roboty przemysłowe, AGH WIMIR AiR, Semestr 6, RP, projekt chwytak, czyjeś, chwytak
CHRAPEK,podstawy robotyki, Roboty przemys owe jako narz dzia
MANIPULATORY I ROBOTY PRZEMYSŁOWE, Logistyka, Przydatne materiały
Instrukcja do ćw 09 Roboty przemysłowe Programowanie robota
Roboty przemyslowe wpro
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
CHRAPEK,podstawy robotyki, Przyk ady konstrukcji robotów przemys owych
Zagadnieniana kolokwium, Automatyka i robotyka air pwr, VI SEMESTR, Automatyzacja procesów przemysło
CHRAPEK,podstawy robotyki, Sterowanie robotów przemys owych
pH sprawko, Automatyka i robotyka air pwr, IV SEMESTR, pomiary przemysłowe, pH
CHRAPEK,podstawy robotyki, Metodyka wprowadzania robotów do przemys u
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
więcej podobnych podstron