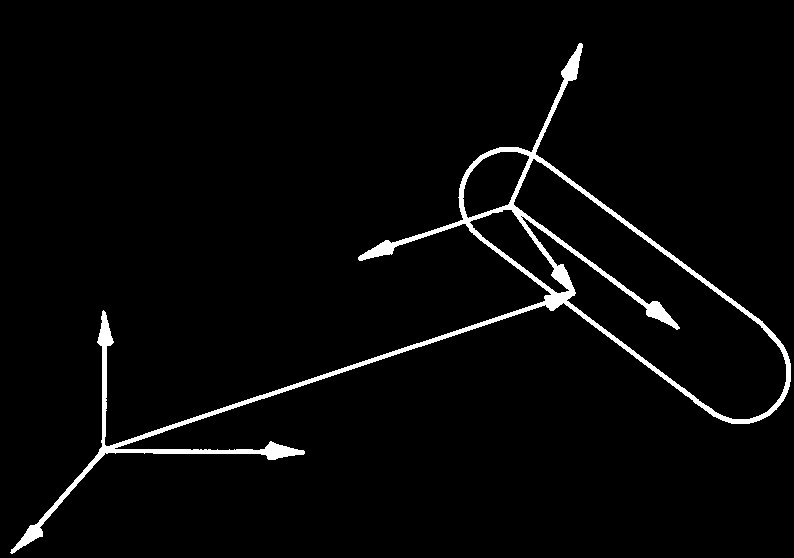
z
i
rr
i
x
i
y i
z 0
rr
i-ty człon y
x
0
0
Rys. 4.5. Układy współrzędnych x y z i x y z 0 0 0
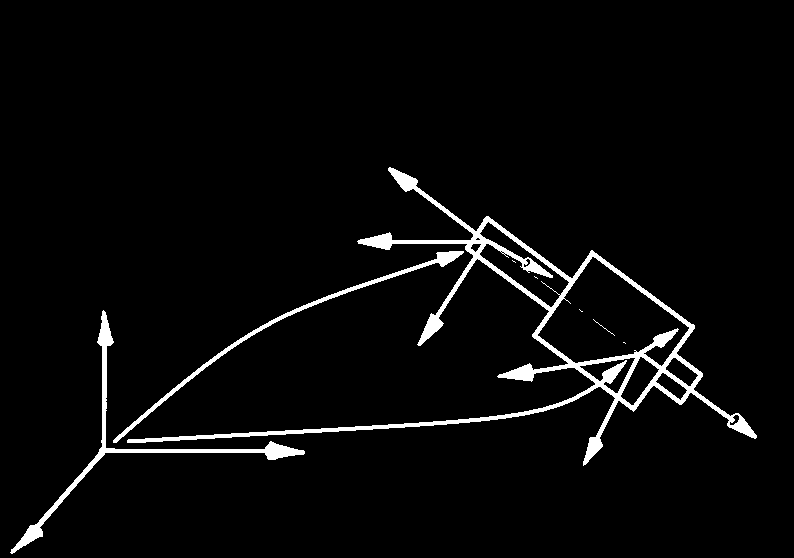
i
i i
y
i
z
i
z
T
ij
ij
rr
ij
x
i
x
ij
y
ij
T
z
i
0
rr
e
j-ty element i-tego zespołu napędowego y
0
x
0
Rys. 4.6. Ilustracja opisu elementu zespołu przekazu napędu z
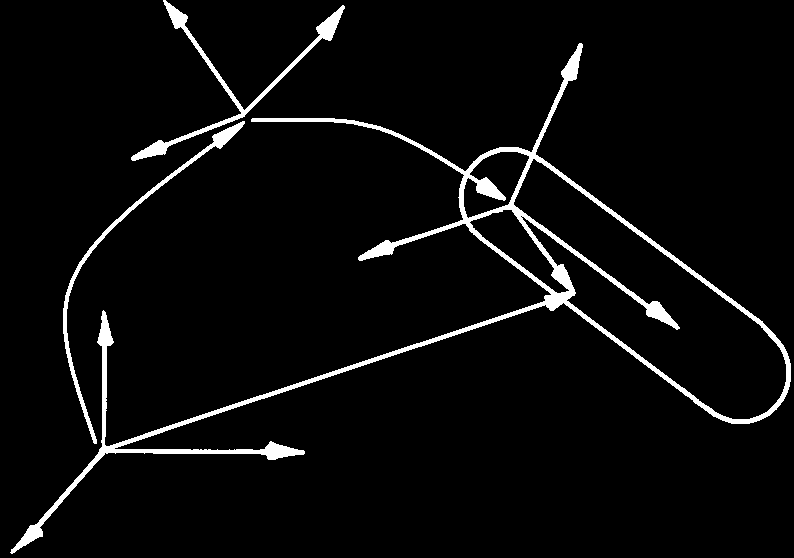
rr
si
si
Element wykonawczy siłownika rr
T
iNi
Korpus
si
z
siłownika
i
z
iN
T
i
y
iN
iN
y
i
i
i
x
i
Rys. 4.7. Ilustracja opisu siłownika i-tego
42
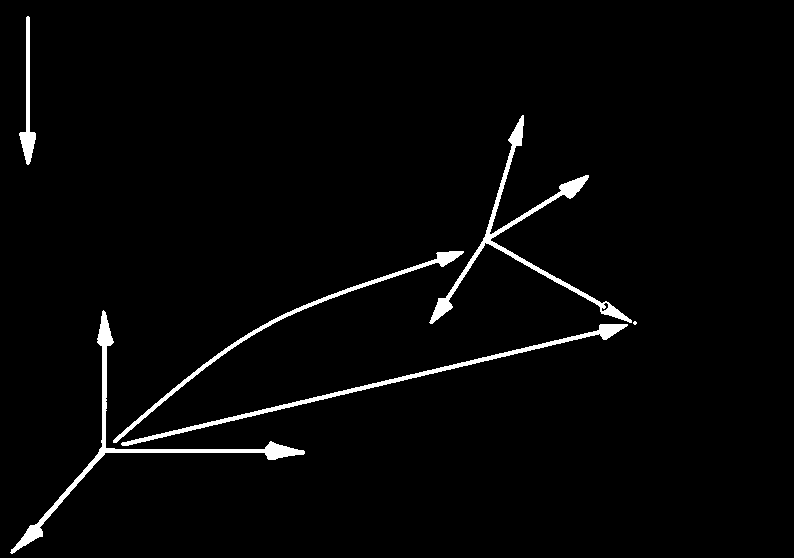
gr
z
i
y
i
T
rr
i
i
z 0
x
i
rr
h
x 0
y 0
Rys. 4.8. Ilustracja opisu środka masy członu i-tego ypl
T pl zp
r
pl
zpl
Opl
T
p
yp
x
O
pl
p
z
x
0
p
0
T
pl
l-ty element p-tego zespołu napędowego
x
O
0
0
y0
Rys. 4.9. Opis elementu l-tego zespołu napędowego członu p-tego x1
gr
S1
y0
1
l
r
y
s1
1
Θ
1
x0
Rys. 4.10. Ilustracja opisu przykładowego manipulatora
Wyszukiwarka
Podobne podstrony:
wyklad 15 chemiczne zanieczyszczenia wod 2
Wykład 1 15
wykład 15 bezrobocie 2013
Wykład 15, Psychiatria UMP
WYKŁAD 15 - FARMAKOLOGIA leki moczopędne, farmacja, farmakologia
10 Wykład (15 12 2010)
Łączność Wyklad 15
2011 01 09 WIL Wyklad 15 (1)
automatyka i sterowanie wyklad 15
Z Wykład 15.03.2008, Zajęcia, II semestr 2008, Analiza matematyczna
Prawo cywilne I wykład 15
OWI Wykład 2 (15 10 2011)
wyklad 15 5.03.2008, wyklady - dr krawczyk
Psychologia społeczna wykłady 15
więcej podobnych podstron