
ELEKTROTECHNIKA – ZA
Z G
A A
G D
A NI
N E
I NI
N A
I
A Z
Z TEO
E RII
I
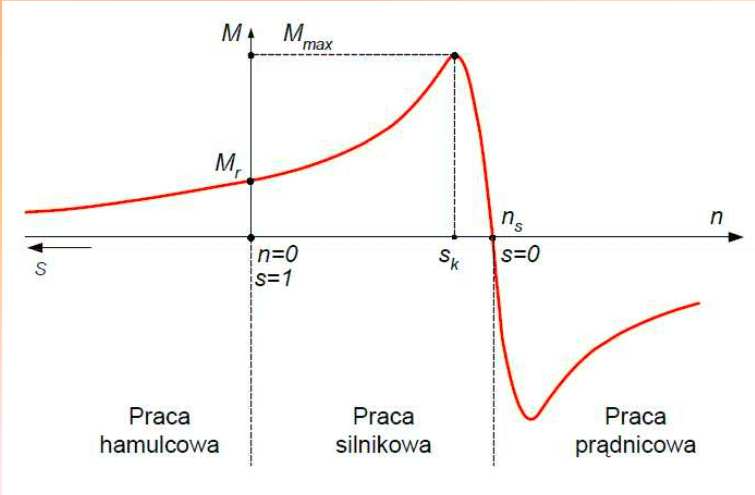
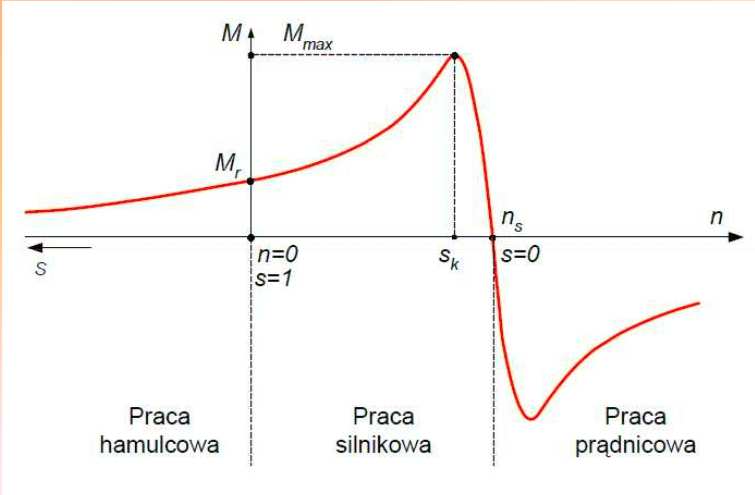
7. Nar
a ys
y ow
o ać
a cha
h r
a ak
a t
k er
e ys
y tykę
k
ę mec
e ha
h n
a i
n c
i zną
n
ą si
s lni
n ka
k
a as
a ync
n hr
h on
o i
n c
i zne
n g
e o
o (
ind
n u
d k
u c
k y
c jne
n g
e o
g )
o M=
M f(
f n)
n
) lub
u
b
M=
M f(
f s)
s i
i ok
o r
k eś
e li
l ć
i jej
e pu
p n
u k
n t
k y
y cha
h r
a ak
a t
k er
e y
r sty
t c
y zne
n .
e
Praca hamulcowa – zakres ha h m
a ow
o an
a i
n a
i
a pr
p z
r e
z ciw
i włączeniem (pr
p z
r e
z c
e iw
i pr
p ą
r d
ą e
d m
e )
) czy
z li
l
i wir
i n
r i
n k
i kr
k ę
r ci
i s
ię
i
pr
p z
r e
z ciw
i ni
n e
i do
d po
p la
l
a ele
l k
e tro
r m
o ag
a n
g e
n ty
t czn
z e
n go
g ,
o m
om
o ent
n el
e e
l ktro
r ma
m g
a n
g e
n tyc
y zn
z y
n jes
e t m
o
m m
o ent
n e
t m
m
hamującym.
Praca silnikowa – zakres pr p a
r c
a y sil
i n
l i
n k
i a
Praca prądnicowa – gdy sil
i n
l i
n k
i owi
i do
d sta
t r
a c
r za
z
a się
i
ę mo
m m
o en
e t
n zg
z o
g dn
d y
n z
z m
o
m me
m nt
n em
e
ele
l ktro
r m
o ag
a n
g e
n ty
t czn
z y
n m
y , zg
z o
g d
o n
d y
n m z
z w
yt
y war
a z
r a
z n
a y
n m
y pr
p z
r e
z z
e
z sil
i n
l i
n k
i po
p pr
p z
r e
z k
e ro
r c
o ze
z ni
n u
i
u pr
p ę
r dk
d ośc
ś i
i
sync
n hr
h o
r ni
n c
i zn
z e
n j
j n1
n m
o
m me
m nt
n
t ele
l kt
k ro
r m
o ag
a n
g e
n t
e yczn
z y
n
y staj
a e
j s
ię
i m
om
o ent
n e
t m
e ha
h m
a uj
u ąc
ą ym
y
m
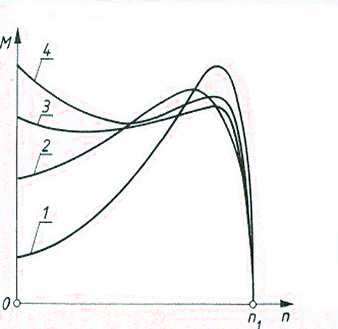
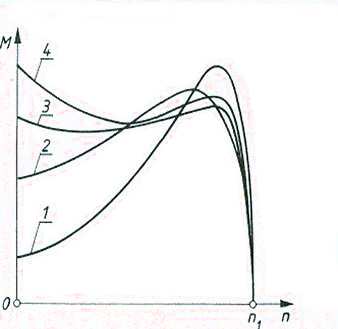
8. Nar
a ys
y ow
o ać
a cha
h r
a ak
a t
k er
e ys
y tyki
k mec
e ha
h n
a i
n cz
c ne
n
e dl
d a
a si
s lni
n kó
k w
ó
w ind
n u
d k
u c
k yj
y ny
n c
y h:
h
: a)
a z
kl
k at
a ką
k
ą zw
z ykł
k ą
ł ;
ą
;
b)
b dw
d uk
u l
k at
a ko
k w
o eg
e o
o c)
c g
łę
ł b
ę o
b k
o o
k
o żło
ł b
o k
b o
k w
o eg
e o.
o Po
o c
o
o st
s os
o u
s j
u em
e y
y roz
o w
z iąz
ą an
a i
n a
a ko
k n
o s
n tru
r k
u c
k yj
y ne
n
e b)
b i
c)
c ?
Ch
C a
h r
a a
r k
a tery
r stki
i me
m cha
h n
a i
n c
i zn
z e
n sil
i n
l i
n k
i ó
k w in
i d
n u
d k
u cy
c jny
n ch:
h
1 – pierścieniowego
2 – jedno klatkowego
3 – głęboko żłobkowego
4 – dwu klatkowego
9. Co
o to
o jes
e t pr
p z
r ec
e i
c ąż
ą al
a no
n ś
o ć
ś s
il
i ni
n ka
k
a ind
n u
d k
u c
k y
c j
y ne
n g
e o
o λ i skąd
ą
d ten
e
n pa
p r
a am
a et
e r od
o c
d z
c y
z tuj
u em
e y
m (t
( ab
a l
b ic
i zka
k
a
zna
n m
a ion
o o
n w
o a
a c
zy
z ka
k t
a al
a og
o
g si
s l
i ni
n kó
k w
ó i
nd
n u
d k
u c
k y
c jny
n ch)
h ?
)
Przeciążalność jest to sto
t sun
u e
n k m
om
o ent
n u
u uż
u y
ż tec
e zn
z e
n go
g
o kry
r ty
t czn
z e
n go
g zn
z a
n m
a io
i no
n wego
g M
k do
momentu użytecznego znamio
i no
n we
w go
g
o MN,
St
S osun
u e
n k
k mo
m m
o ent
n u
u k
ry
r t
y yczn
z e
n go
g do
d
o m
om
o ent
n u
u zn
z a
n m
a io
i n
o o
n wego
g na
n z
a y
z w
y an
a y
n
y jest
t pr
p z
r e
z cią
i ż
ą a
ż l
a n
l o
n ścią
i
ą
silnika.
Parametr przeciążalności od o c
d zy
z tuj
u e się
i z
z kat
a al
a o
l gu
g .
ELEKTROTECHNIKA – ZAGADNIENIA Z TEORII 10. Jakie są sposoby regulacji obrotów w silnikach indukcyjnych?
Zmiana prędkości obrotowej może się odbywać : Przez zmianę częstotliwości napięcia zasilającego – z przemienną częstotliwością przy czym zachowuje się stały stosunek napięcia do częstotliwości.
Zmianę liczby par biegunów – przy silnikach wielobiegunowych.
Zmianę poślizgu wirnika, które może być dokonywane przez zmianę napięcia – silniki klatkowe i pierścieniowe.
11. Podać zalety i wady silników indukcyjnych.
Zalety:
Wady:
• Duża niezawodność
• Duży prąd rozruchowy
• Prosta konstrukcja
• Duży wpływ wahań napięcia na
• Niewielka zmienność prędkości przy moment napędowy
dużych obciążeniach
• Mały kąt cosφ i sprawność przy małym
• Prosty i łatwy w automatyzacji obciążeniu
rozruchu (zwłaszcza silniki klatkowe) 12. Jaka jest definicja napięcia zwarcia w transformatorze?
Napięcie zwarcia w transformatorze jest to napięcie, które trzeba przyłożyć do uzwojenia pierwotnego, aby w zwartym uzwojeniu wtórnym wywołać prąd równy znamionowemu prądowi wtórnemu.
Napięcie zwarcia najczęściej wyraża się w procentach znamionowego napięcia zasilania.
13. Jakie dane dotyczące wielkości elektrycznych zawiera tabliczka znamionowa transformatora elektroenergetycznego?
moc pozorna
napięcia i prądy strony wtórnej i pierwotnej częstotliwość
napięcie zwarcia
sposób chłodzenia
masa
zmierzone starty znamionowe: jałowe i obciążeniowe 14. Jakie rozróżniamy rodzaje strat w transformatorze – podać zależności.
Straty histerezowe i wiroprądowe w stojanie – nie zależą od obciążenia w wirniku (pomijalnie małe). Stanowią od 2 do 5% mocy znamionowej.
Straty mechaniczne – wynikają z tarcia łożysk i napędu wentylatora, nie zależą od obciążenia, stanowią od 1 do 2% mocy znamionowej.
Straty w uzwojeniach i stojanie wirnika – są wprost proporcjonalne do kwadratu prądu, który płynie w przewodach. Dla obciążenia znamionowego wynoszą od 5 do 15% mocy znamionowej.
Wyszukiwarka
Podobne podstrony:
ELEKTROTECHNIKA zagadnienia z teorii
ELEKTROTECHNIKA zagadnienia z teorii
LD NM , Elektrotechnika-materiały do szkoły, wybrane zagadnienia z teorii obwodów Szymański
Ściąga 4.3, Elektrotechnika-materiały do szkoły, wybrane zagadnienia z teorii obwodów Szymański
Elektrotechnika - zagadnienia egzaminacyjne, Elektronika
Metrologia Elektryczna zagadnienia egzaminacyjne
elektrostatyka i elektryczność zagadnienia
Najważniejsze zagadnienia z teorii poznania
zawilak,maszyny elektryczne, zagadnienia
WYKAZ ZAGADNIEŃ Z TEORII LITERATURY I POETYKI, filologia polska i okolice, Teoria Literatury, UMK
Elektra-zagadnienia, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELEKTRA
Eegzamin Elektrotechnika zagadnienia 2009
Zagadnienia z teorii błędów2012
Podstawowe zagadnienia z teorii decyzji, Studia - administracja, Organizacja i zarządzanie
Zagadnienia z teorii
Elektroenergetyka zagadnienia ekonomiczne
Bezpieczenstwo elektryczne zagadnienia wyklad
więcej podobnych podstron