W4-1 Notatki do wykładu „Sygnały dyskretne” Instytut Automatyki PŁ
Równoważność LRR i układu LRR
a x( n + m) + a
x( n
L
−
+ m − )
1 +
+ a x( n + )
1 + a x( n) = f ( n) m
m 1
1
0
warunki początkowe: x( m
)
1 ,L
−
, x )
1
( , x(0)
m
m 1
M ( z) = a z + a
z −
L
−
+ + a z + a
m
m 1
1
0
f ( n) ≡ ,
0
am = 1
x( n + m) + a
x(
L
m−
n + m − )
1 +
+ a x( n + )
1 + a x( n) = 0
1
1
0
m
m 1
M ( z) = z + a
z −
L
−
+ + a z + a
m 1
1
0
x ( n) := x( n)
1
x ( n) := x ( n + ) 1 = x( n + )
1
2
1
x ( n) := x ( n + ) 1 = x( n + 2)
3
2
..................................................
x ( n) :
m
= x (
m−
n + )
1 = x( n + m − )
1
1
x ( n + )
1 = x( n + m)
m
x ( n
− a x( n
L
−
+ m − )
1 −
− a x( n + )
1 − a x( n)
m
+ )
1 =
m 1
1
0
x ( n
− a x ( n) L
−
− − a x ( n) − a x ( n) m
+ )
1 =
m 1
m
1
2
0 1
x( n + )
1 = Ax( n),
x ( n)
x (0) x(0)
1
1
x ( n)
x (0)
x )
1
(
2
x( n) =
2
, x(0) =
=
M
M
M
x ( n)
x (0)
x( m − )
1
m
m
W4-2 Notatki do wykładu „Sygnały dyskretne” Instytut Automatyki PŁ
0
1
0
L
0
L
0
0
1
0
A = M
M
M
O
M
0
0
0
L
1
− a
a
a
L
a
0
− 1 − 2
−
m−1
m
m 1
M ( z) = z + a
z −
L
−
+ + a z + a
-
wielomian
m 1
1
0
charakterystyczny macierzy A
zi wartości własne A

W4-3 Notatki do wykładu „Sygnały dyskretne” Instytut Automatyki PŁ
Opis układów dyskretnych w przestrzeni stanów
x(( k + )
1 T ) = Ax( kT ) + Bu( kT ) y( kT ) = Cx( kT ) + Du( kT ) x((k+1)T)
x(kT)
y(kT)
u(kT
1
z
Rozwiązanie:
x(( k + )
1 T ) = Ax( kT ) + Bu( kT ) x( T ) = Ax(0) + Bu(0) x(2 T ) = Ax( T ) + Bu( T ) 2
= A x(0) + ABu(0) + Bu( T ) x 3
( T ) = Ax(2 T ) + Bu(3 T ) =
3
A x(0)
2
+ A Bu(0) + ABu( T ) + Bu(2 T)
.....................................................................
k 1
−
k
k
i 1
−
x( kT ) = Ak x( )
0
k − i 1
+ ∑ A − Bu( i)
+ ∑
−
= A x(0)
A Bu(( k
i) T )
i=0
i 1
=
Operatorowo
zX ( z) − zx(0) = AX ( z) + Bu( z)
−
X ( z) = ( zI − A) 1( zx( ) 0 + Bu( z))
1
−
Ak = Z { z( zI − A) 1
− } macierz tranzycyjna
1
−
−1
Ak
= Z ({ zI − A) 1−}
Y ( z) =
−
CX ( z) + Du( z) = C( zI − A) 1( zx( ) 0 + Bu( z))+ Du( z) x( )
0 =
−
0 ⇒ Y ( z) = [ C( zI − A) 1 B + D] u( z)
W4-4 Notatki do wykładu „Sygnały dyskretne” Instytut Automatyki PŁ
G( z =
−
C( zI − A) 1
)
B + D macierz transmitancji dyskretnych
W4-5 Notatki do wykładu „Sygnały dyskretne” Instytut Automatyki PŁ
Postać modalna rozwiązania:
A ma n różnych wartości własnych zi Macierzą przekształcenia przez podobieństwo do postaci diagonalnej jest macierz, której kolumnami są wektory własne:
z
L
0
0
1
0
z
L
0
2
Λ =
V = [ v
v
L
v
M
M
O
M
1
2
n ],
L
0
0
zn
v
A
= z v
i
i
i i=1,...., n
AV = Λ
V
−1
A = VΛ V
−
V 1 AV = Λ
2
−1
−1
2
−1
A = VΛ V VΛ V
= VΛ V
3
2
−1
−1
3
−1
A = VΛ V VΛ V
= VΛ V
.........................
T
k
L
z
0
0
w 1
1
k
T
0
z
L
0
−1
w 2
k
2
k
k
−1
V
=: W =
A = VΛ V Λ =
M
M
O
M
,
M
T
k
L
0
0
z
w
n
n
n
k
k
k
−1
∑( z v w
j )
T
A = VΛ V =
j
j
j=1
k
n
x( kT )
k
i 1
−
∑( zj ) k
T
= A x(0) + ∑ A Bu(( k − i) T ) ==
v w x( )
0
j
j
i=0
j 1
=
k
n
+ ∑∑( −
z
−
j ) i 1 v wT Bu(( k i) T )
j
j
i 1
= j=0
n
n
k
∑(
T
i 1
z
+
−
∑ v w ∑
−
j
j
( zj) Bu(( k i) T) i ) k
T
=
v w x(0)
i
i
i 1
=
j 1
=
i=0
część swobodna
część wymuszona
W4-6 Notatki do wykładu „Sygnały dyskretne” Instytut Automatyki PŁ
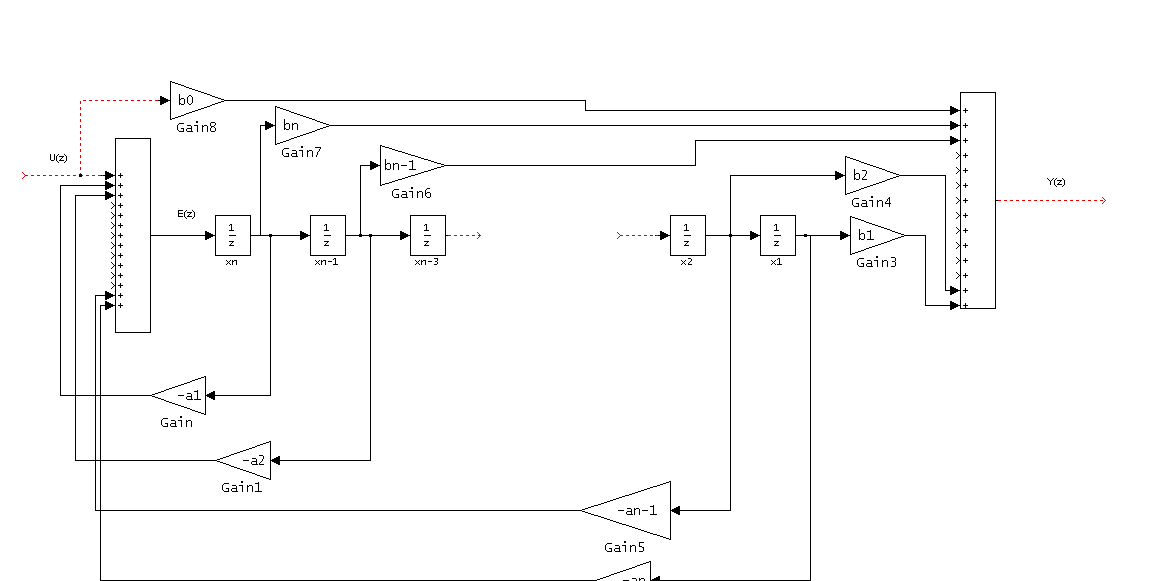
Wyznaczanie opisu w przestrzeni stanów
(I wariant metody bezpośredniej)
~
~
~
n
n
n−1
n−2
Y ( z)
b z
~
b z
1
+ b z
2
+L+ b
0
+ b z −1
1
+L+ bn
G( z) =
=
n
b 0 +
n
n
=
−
U ( z)
z + a z −1
n
n
z + a z 1
1
+L+ a
1
+L+ an
n
~
~
~
~
~
~
b = b − a b , b = b − a b ,L, b = b − a b 1
1
1 0
2
2
1 0
n
n
n 0
−1
−2
− n
~
b z
1
+ b z
2
+L+ b z
n
G( z) = b 0 +
−1
− n
1+ a z
1
+L+ a z
n
~
( )
Y ( z) = b U ( z) 0
+ ( −1
−2
−
U z
n
b z
1
+ b z
2
+L+ b z
n
)
−1
− n
1+ a z
1
+L+ a z
n
U ( z)
E( z) =
−1
− n
1+ a z
1
+L+ a z
n
E( z) = U ( z) − (
1
−
2
a z
+ a z− +L+ a z− n E z
1
2
n
) ( )
X ( z) = z− nE( z) 1
X ( z) = zX ( z)
− n 1
= z + E( z),L, X ( z) = zX ( z) 1
= z− E( z)
2
1
n
n 1
−
wtedy:
x (( k + )
1 T )
0
1
L
0 x ( kT )
0
1
1
M
O
O
M
M
=
+
u( kT )
x (( k
L
−
+ )
1 T )
0
0
1 x
( kT )
0
n 1
n 1
−
x (( k + )
1 T )
− a
− a
L
−
− a x ( kT) 1
n
n
n 1
1
n
x ( kT )
1
M
y( kT ) = [ b
b
L
b
−
+ b u kT
n
n 1
1 ]
~ ( )
x ( kT )
0
n 1
−
x ( kT )
n
W4-7 Notatki do wykładu „Sygnały dyskretne” Instytut Automatyki PŁ
Liniowe przekształcenie zmiennych stanu:
Opis układu w postaci:
x(( k + )
1 T ) = Ax( kT ) + Bu( kT ) y( kT ) = Cx( kT ) + Du( kT )
x(kT) – wektor zmiennych stanu o wymiarze nx1,
u(kT) – wektor wejść/sterowań o wymiarze rx1
y(kT) – wektor wyjść o wymiarze mx1
wprowadzamy nowe zmienne stanu:
Pq( kT ) = x( kT ), det P ≠ 0
Pq(( k + 1 )T ) = APq( kT ) + Bu( kT ) nowe równanie s tan u
y( kT ) = CPq( kT ) + Du( kT ) nowe równanie wyjścia
W4-8 Notatki do wykładu „Sygnały dyskretne” Instytut Automatyki PŁ
−1
−1
q(( k + 1 )T ) = P APq( kT ) + P Bu( kT ) nowe równanie s tanu
y( kT ) = CPq( kT ) + Du( kT ) nowe równanie wyjścia
%
%
%
−1
%
−1
q(( k + 1 )T ) = Aq( kT ) + Bu( kT ) A = P AP, B = P B
y( kT ) = C% q( kT ) + Du( kT ) C% = CP
wartości własne nowej macierzy stanu są takie same jak starej!!
Jaka będzie transmitancja:
−
−
G(
% z ) = C%( zI − A%) 1 B% + D = CP( zI − P− AP) 1
1
1
P− B + D =
−
−
−
−
−
= CP P
( zI − A) 1
P P B
+ D = CPP ( zI − A) 1
1
1
1
1
PP− B + D =
−
= C ( zI − A) 1 B + D = G( z )
−
−
−
bo ( MN ) 1
1
1
=
N M
liniowe przekształcenie zmiennych stanu nie zmienia transmitancji!!
Wyszukiwarka
Podobne podstrony:
sd, STUDIA, Psychologia, wykłady
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
Zaburzenia nerwicowe wyklad
Szkol Wykład do Or
Strategie marketingowe prezentacje wykład
Wykład 6 2009 Użytkowanie obiektu
wyklad2
wykład 3
wyklad1 4
więcej podobnych podstron