Rok II A. i R. |
LELEK PAWEŁ GRZEGORZ MALCHEREK |
25-III-1998 odd. 1-IV-1998 |
Ćw. nr 5
|
SERWOMECHANIZM
|
|
Celem ćwiczenia jest zapoznanie się z zasadą działania i właściwościami ruchowymi serwomechanizmu.
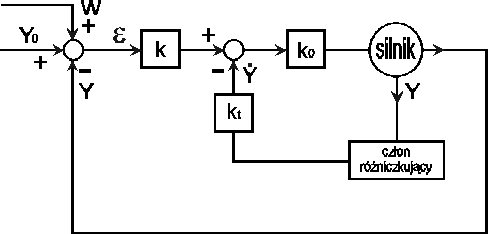
Uproszczony schemat blokowy badanego serwomechanizmu.
Powyższy układ ma możliwość otwarcia pętli sprzężenia zwrotnego Y i Y` w celu wyznaczenia charakterystyk czasowych układu otwartego i porównania ich z charakterystykami układu zamkniętego.
Wyznaczenie charakterystyk czasowych układu otwartego.
Do wyznaczenia ch-tyk czasowych układu wyłączamy sprzężenie zwrotne sygnałów Y i Y`, podajemy na wejście skok jednostkowy i badamy przebieg wartości Y w czasie.
Charakterystyki są wyznaczane dla 3 różnych nastaw wartości k i k0, co odpowiada trzem różnym kolorom linii.
Z przebiegu tych charakterystyk potrafimy określić jakiego rodzaju obiektem jest silnik użyty w układzie. Stwierdzamy, że jest to obiekt całkujący z opóźnieniem. Dla uproszczenia analizy układu przyjmujemy inercję I rzędu. Ze względu na bardzo zbieżne charakterystyki transmitancję silnika wyznaczymy na podstawie przebiegu linii czerwonej.
Transmitancja członu całkującego rzeczywistego ( z inercją I rzędu ) wyraża się następująco:
![]()
Parametry T oraz kv można odczytać z charakterystyki w sposób oznaczony na przebiegach zarejestrowanych przez ploter.
Odczytujemy: T = 1,3 s k = 1,32
Transmitancja: ![]()
Odpowiedź ![]()
, gdzie U(s) jest operatorową funkcją wymuszającą, w naszym przypadku ![]()
, co odpowiada skokowi jednostkowemu o wzmocnieniu kwe.
![]()
Tej operatorowej postaci Y odpowiada
![]()
Pochodna po czasie funkcji y(t) ma postać:
![]()
W układzie mamy możliwość obserwowania tej wartości co zostało zarejestrowane przez rejestrator. Kolory poszczególnych linii odpowiadają kolorom zarejestrowanych przebiegów Y(t) przy takich samych parametrach układu.
Wyznaczenie charakterystyk czasowych układu zamkniętego.
Do wyznaczenia tych charakterystyk zamykamy pętlę sprzężenia zwrotnego sygnału Y oraz obserwujemy jego zmiany na skok jednostkowy. Podobnie jak w układzie otwartym charakterystyki są wyznaczane dla 3 różnych nastaw wartości k i k0, co odpowiada trzem różnym kolorom linii. Charakterystyki zostały wykreślone dla tych samych parametrów k i ko co dla układu otwartego.
Badanie układu ze sprzężeniem tachometrycznym
W układzie zostały zamknięte obydwa sprzężenia zwrotne: sygnału Y oraz sygnału ![]()
. Za pomocą zmian wartości k i k0 układ serwomechanizmu został doprowadzony do stałych drgań, następnie badaliśmy wpływ zmian wartości wzmocnienia k0 i kt na przebieg oscylującej wartości Y.
Badanie wpływu sprzężenia tachometrycznego na oscylacje sygnału Y
Układ serwomechanizmu został doprowadzony do niegasnących oscylacji sygnału Y przy zamkniętym torze sprzężenia zwrotnego tego sygnału. Następnie został zamknięty tor sprzężenia zwrotnego sygnału ![]()
.
6. Uwagi i wnioski.
Na podstawie ch-ki czasowej sygnału Y zidentyfikowaliśmy obiekt jako całkujący z inercją I rzędu. Jako że sygnał zadany Y0 nie był równoważony przez Y silnik kręciłby się cały czas co powodowało dojście sygnału Y poza zakres rejestratora. Na podstawie odczytanych z charakterystyk parametrów T i kv mogliśmy określić transmitancję operatorową G(s), a następnie z U(s) i G(s) określiliśmy Y(s). Po przekształceniu na postać y(t) i po obliczeniu wzoru na pochodną funkcji y(t) stwierdzamy, że przebieg sygnału ![]()
, który jest odpowiednikiem pochodnej y(t) ma kształt odpowiadający funkcji wyliczonej. Na podstawie przebiegu ![]()
można także określić parametry T i k0. Po odczytaniu T z ch-ki ![]()
=f(t) otrzymaliśmy taką samą wartość jak z Y=f(t) : T=1,3 s. Wartości k0 są rozbieżne dlatego, że prądnica odpowiedzialna za różniczkowanie sygnału Y ma pewien współczynnik wzmocnienia który powoduje zmianę k0 w ch-ce ![]()
=f(t).
Przy zdejmowaniu ch-tyk Y=f(t) i ![]()
=f(t) mieliśmy badać wpływ zmian współczynników wzmocnienia k i k0 na przebieg Y=f(t), jednak podczas przebiegu tego badania przy zmniejszaniu k0 zwiększaliśmy k co w wyniku powodowało pewną kompensację wzmocnienia, gdyż obydwa wzmacniacze znajdują się na jednym torze, więc wzmocnienie wypadkowe kw=k·k0. Z tego powodu charakterystyki zarejestrowane przez ploter są bardzo blisko siebie. Analizując kształt i części składowe toru przy badaniu Y=f(t) wnioskujemy, że wzrostowi parametrów k i k0 powinna odpowiadać zwiększenie nachylenia charakterystyk, a tym samym zwiększeniu wartości kv.
Po zamknięciu toru sprzężenia zwrotnego sygnału Y widzimy, że sygnał ten powoduje ustabilizowanie się układu tzn. silnik zatrzymuje się. Zastosowane w układzie ujemne sprzężenie zwrotne sygnału Y powoduje zmniejszenie nachylenia charakterystyk: kąt z (ch-ka c)) jest mniejszy od (ch-ka a)). Znając poziom na którym ustabilizował się sygnał Y możemy określić wartość sygnału zadanego Y0. W stanie równowagi Y=Y0.
Badając ch-ki czasowe układu z ujemnym tachometrycznym sprzężeniem zwrotnym badaliśmy wpływ zmian k0 i kt na zachowanie się oscylującego sygnału Y ( układ na granicy stabilności). Przy zmniejszeniu k0 zmniejszyliśmy wartość wzmocnienia sygnału bezpośrednio przed silnikiem co spowodowało ustabilizowanie się układu: amplituda sygnału zmniejszyła się do zera, a okres gasnących drgań zmniejszył się : 2T>2T`, co jest bezpośrednim skutkiem zmniejszenia k0. Natomiast przy zmniejszeniu kt w torze ujemnego sprzężenia ![]()
nastąpił wzrost amplitudy oscylacji Y a zarazem okres drgań: 2T`>2T. Zmniejszenie k0 spowodowało zmniejszenie wartości ![]()
dochodzącego do węzła sumacyjnego ze znakiem ujemnym. W tym przypadku zmniejszeniu ![]()
odpowiada wzrost wartości sygnału dochodzącego do silnika.
Ostatnim etapem ćwiczenia było badanie wpływu sprzężenia zwrotnego ![]()
na układ w stanie oscylacji Y. Załączenie toru ![]()
powoduje ustabilizowanie się układu co odpowiada linii prostej na ch-ce e). W rzeczywistości po załączeniu sprzężenia zwrotnego amplituda drgań silnika nie doszła do zera tylko zmniejszyła się kilkakrotnie. Drgania o tak niskiej amplitudzie nie zostały zarejestrowane przez ploter. Dopiero po małym zwiększeniu kt układ ustabilizował się całkiem. Zastosowane sprzężenie tachometryczne powoduje tłumienie drgań układu.
Serwomechanizm
1