AGH, Wydział EAIiE
Katedra Automatyki Napędu i Urządzeń Przemysłowych
|
Nazwisko i Imię:
Marcin Szybowski
|
|||
LABORATORIUM TEORII SEROWANIA I TECHNIK REGULACJI
|
Semestr: IV |
|||
Rok szkolny: 2001/2002
|
Rok studiów: II |
Grupa: 8 |
||
Kierunek: Elektrotechnika
|
Nr ćwiczenia: 5, |
|||
Temat ćwiczenia: Regulator PID - charakterystyki czasowe i częstotliwościowe.
|
||||
Data wykonania: 20-05-2002 |
Data oddania:
|
Data zaliczenia sprawozdania:
|
||
Wprowadzenie teoretyczne
Regulator PID jest elementem układu regulacji realizującym w przypadku idealnym następującą zależność u(t) od e(t) :
Odpowiada to transmitancji:
gdzie:
Kp - współczynnik wzmocnienia proporcjonalnego
Ki - współczynnik wzmocnienia całkowego
Kd - współczynnik wzmocnienia różniczkowego
- inercja rzędu 0,001
Ki = 1/Ti
Kd = Td
Ti - czas zdwojenia
Td - czas wyprzedzenia
1. Wykaż ,żę regulotor P i PD w przeciwieństwie do PI, PID nie zapewniają likwidacji uchybu ustalonego.
Transmitancja obiektu: Go(s)=
Sygnał wejściowy: ref(s) =
Sygnał wyjściowy : E(s)=G(S)*ref(s)
Transmitancja układu: G(s)=
Z twierdzenia o wartości granicznej:
f(∞)=
= f(t)
sF(s)
wyniki dla regulatorów poszczególnych typów:
1) regulator P:
G(s) =
GR(s)=Kp e(t)=
2) regulator PD:
G(s)=
GR(s)=Kp +sTd e(t)=
3) regulator PI:
G(s)=
GR(s)=Kp+
e(t)=0
4) regulator PID:
G(s)=
GR(s)=Kp+
+Tds e(t)=0
Wynika stąd, że regulatory typu PI oraz PID, które zawierają człon całkujący, zapewniają likwidację uchybu. Regulatory P i PD nie likwidują uchybu.
2. Dobrać parametry regulatora PID według metody Ziglera i Nicholsa. Skorzystać z funkcji [Km, Pm, wcg, wcp] = margin (L, M) obliczając margines (zapas) wzmocnienia Km i fazy Pm dla układu opisanego równaniami stanu lub transmitancją (L - licznik, M - mianownik) oraz odpowiadające im częstotliwości graniczne - odpowiednio wcg (= w180) i wcp. Przedstawić przebiegi.
Obiekt:
.
Przyjmując
H(s)=1 - pętla jednostkowego sprzężenia zwrotnego
D(s)=0 - sygnał zakłócenia
Obliczone wartości
Km. = 14.5833 wcg = 0.1354
Nastawy regulatora PID:
Kp = 8.7500 Ti = 23.2022 Td = 5.8005
Charakterystyki Częstotliwościowe, Bode'go i Nyquista.
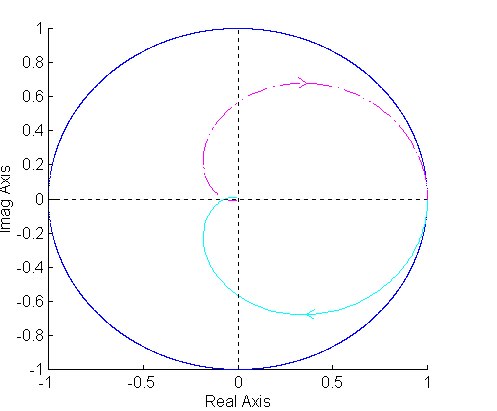
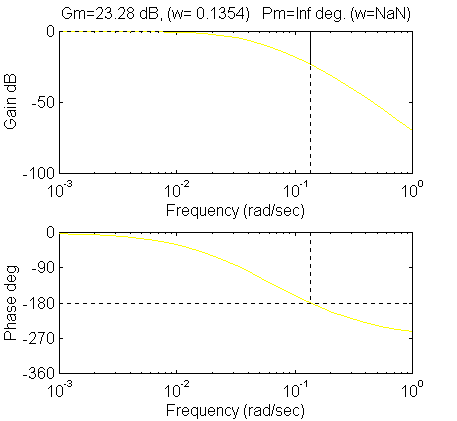
Na podstawie tych charakterystyk możemy stwierdzić, że występuje zapas amplitudy oraz zapas fazy. W takiej sytuacji możemy na pewno stwierdzić, że układ jest stabilny.
Wpływ zmian nastaw na parametry układu (dla malejących nastaw kP,kD,kI.)
|
Czas Narastania |
Przeregulowanie |
Czas ustalenia |
Błąd w stanie ustalonym |
Szerokość pasma |
Moduł rezonansowy |
Częstotliwość rezonansowa |
kP |
Narasta |
narasta |
narasta |
zmienia się |
stała |
narasta |
Maleje |
kI |
Narasta |
opada |
zmienia się |
opada |
narasta |
opada |
zmienia się |
kD |
Narasta |
narasta |
narasta |
opada |
stała |
narasta |
zmienia się |
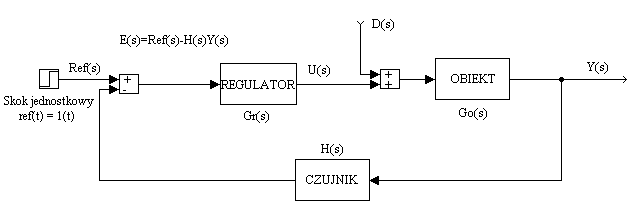
Na podstawie układu przedstawionego poniżej wyznaczyć transmitancję
oraz przebieg y(t) przy d(t) = 1(t), ref(t) = 0 dla regulatora P, PD, PI, PID. Zinterpretować otrzymane wyniki i porównać z przebiegiem y(t) i ref(t) = 1(t) przy d(t) = 0(t).
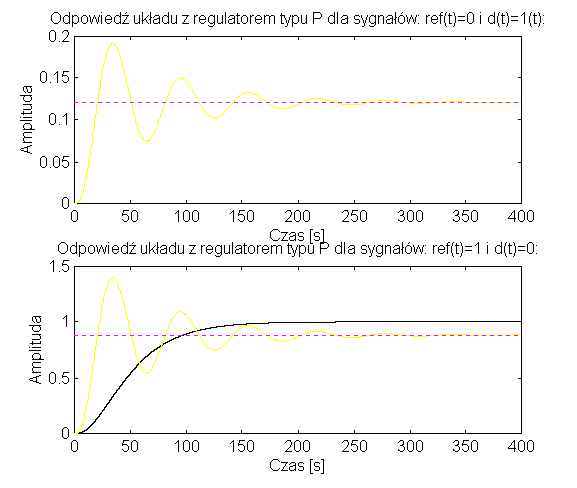
regulator P
dla d(t)=1(t) i ref(t)=0
transmitancja układu:
dla d(t) = 0 i ref(t) = 1(t)
transmitancja układu:
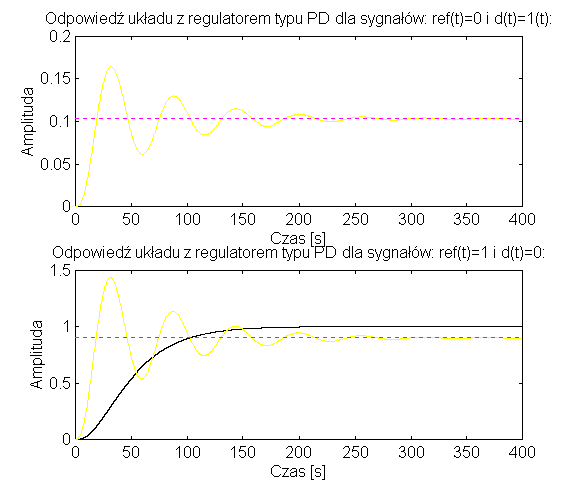
- regulator PD:
dla d(t) = 1(t) i ref(t) = 0
transmitancja układu:
dla d(t) = 0 i ref(t) = 1(t)
transmitancja układu:
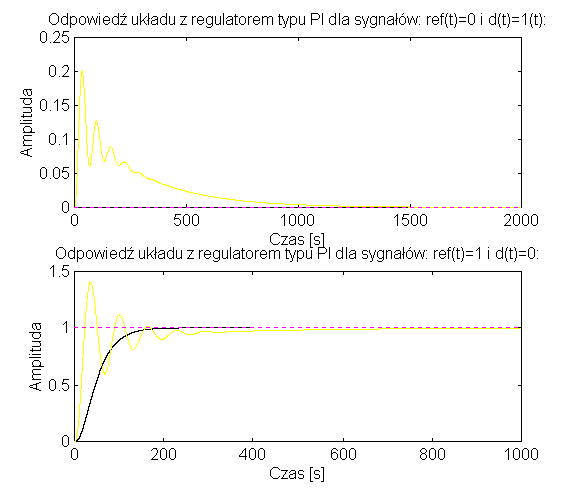
regulator PI:
dla d(t) = 1(t) i ref(t) = 0
transmitancja układu:
dla d(t) = 0 i ref(t) =1(t)
transmitancja układu:
regulator PID:
dla d(t) = 1(t) i ref(t) = 0
transmitancja układu:
dla d(t) = 0 i ref(t) =1(t)
transmitancja układu:
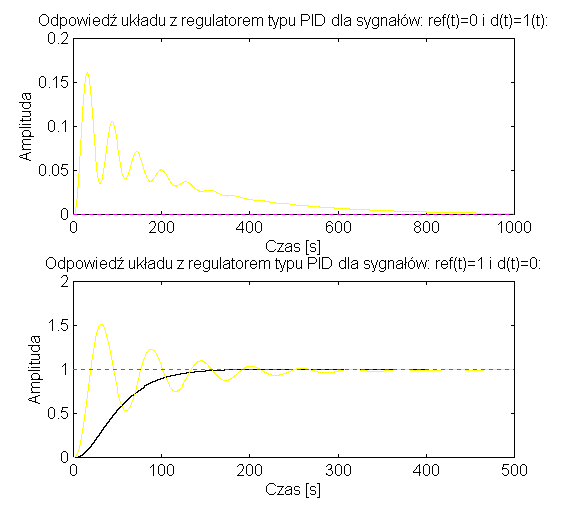
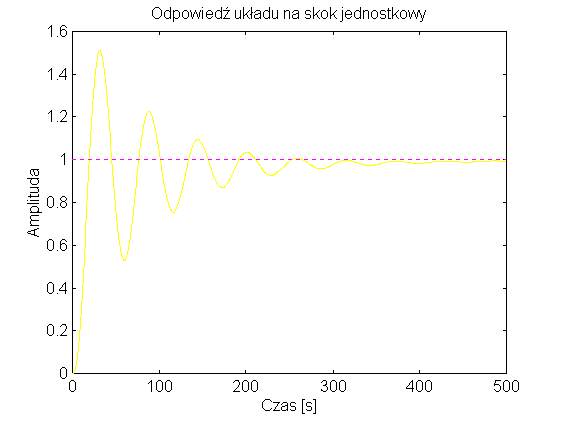
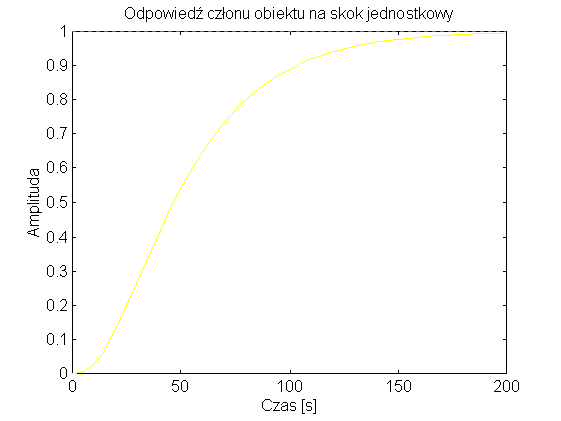
Na podstawie wykresów, gdzie wymuszeniem jest sygnał zakłócenia, możemy określić czy dany regulator wprowadza uchyb. Dla PID i PI maleje on do zera natomiast dla P ustala się na konkretnej wartości. Gdy zakłócenie jest równe zero obserwujemy jakościowe możliwości regulacyjne regulatorów:
P |
wprowadza uchyb, małe przeregulowanie i mała ilość oscylacji |
PI |
brak uchybu, największe przeregulowanie i najwięcej oscylacji |
PID |
brak uchybu, średnie przeregulowanie i średnia ilość oscylacji |
Wnioski
Zmiana parametru:
Kp : poprawia parametry badanego układu, powodując szybsze osiągnięcie wartości ustalonej przez układ. Niestety zbyt duży wzrost zadanego parametru powoduje powstawanie oscylacji. Parametr ten należy dobierać w ten sposób, aby uzyskać kompromis pomiędzy szybkością narastania sygnału i brakiem oscylacji a szerokością pasma.
Ki : powoduje poprawę działania układu. Zmiana tego parametru wpływa podobnie na działanie układu jak zmiana Kp, jednak zmiana Ki dokonuje się w o wiele mniejszym przedziale. Także w przypadku wzrostu tego parametru sygnał szybciej ustala się na danej wartości.
Kd : powoduje nieznaczny wzrost szybkości narastania obserwowanego sygnału. W zakresie dokonanych zmian nie da się zauważyć żadnych przeregulowań.
Wyszukiwarka
Podobne podstrony:
REGULACJA PID , Energetyka, sem5, sem5, met.ZN
BADANIE STATYCZNYCH I DYNAMICZNYCH WŁAŚCIWOŚCI REGULATORÓW PID
04Nastawy regulatora PID
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
Badanie układu sterowania z regulatorem PID
Regulator PID Cool
Regulator PID (2)
DOBÓR NASTAW REGULATORA PID
automaty-sprawko-pid, Temat ćwiczenia: REGULATORY PID
Regulator Pid
H Juszka i in Sterowanie logiczne z regulacja PID
PID-B, regulatory PID:
Ćw 6 Regulacja PID
Dobór parametrów regulatora PID – symulacja komputerowa
FAQ Konfiguracja regulatora PID
UKŁADY REGULACJI, układ regulacji PID
Regulator PID
Kwapisz strojenie regulatorów PID
więcej podobnych podstron