|
AKADEMIA GÓRNICZO - HUTNICZA W KRAKOWIE |
Grupa B
Rafał Szemraj |
||||
EAIiE |
2001/2002
|
Rok II Semestr IV |
Elektrotechnika |
Rok B Grupa 8 |
||
Temat: Regulatory PID - charakterystyki czasowe i częstotliwościowe. |
||||||
Data wykonania: 2002-04-12 |
Data zaliczenia: |
Ocena: |
||||
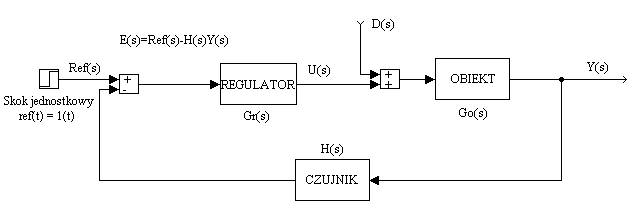
Regulatory P,PD i PI, PID a likwidacja uchybu ustalonego.
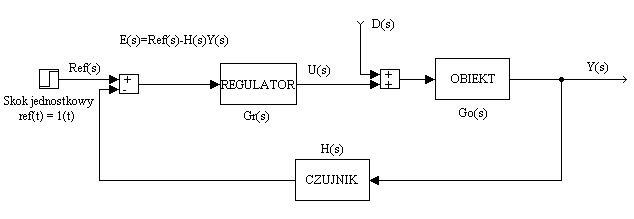
Niech Ref(s) = X(s). Zgodnie ze schematem mamy:
oraz
Zgodnie z definicją wartości końcowej:
.
Rozważmy teraz wartość uchybu e(t) w stanie ustalonym dla poszczególnych typów regulatorów.
Niech
i
i
Regulator P (proporcjonalny):
Mamy
,
wtedy:
Widzimy, że dla regulatora proporcjonalnego w czasie ustalonym wartość uchybu jest różna od zera.
Regulator PD (proporcjonalno - różniczkujący):
Mamy
,
wtedy:
Widzimy, że dla tego regulatora uchyb ustalony też jest różny od zera.
Regulator PI (proporcjonalno - całkujący):
Mamy
,
wtedy:
W tym przypadku ustalona wartość uchybu wynosi zero. Spowodowało to zastosowanie członu całkującego w regulatorze.
Regulator PID:
Mamy
,
wtedy:
Również regulator PID zawierający człon całkujący posiada zerowy uchyb ustalony.
WNIOSEK: Regulatory zawierające część całującą likwidują uchyb ustalony w przeciwieństwie do regulatorów pozbawionych tego członu.
Dobór parametrów regulatora PID metodą Zieglera - Nicholsa dla zadanego obiektu.
Transmitancja obiektu:
Dobierając parametry regulatora PID dla tego obiektu według metody Zieglera - Nicholsa otrzymałem następujące wyniki:
stąd mamy:
Na podstawie zależności
i
otrzymujemy ostatecznie nastawy regulatora PID:
Stąd transmitancja regulatora PID:
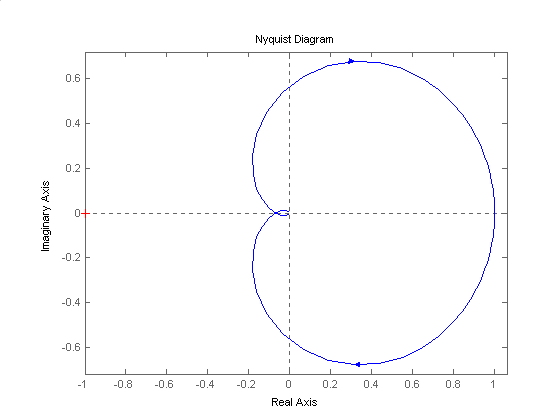
Zgodnie ze schematem transmitancja zastępcza układu otwartego wyniesie (w tym punkcie zakładam zerowy sygnał zakłóceń):
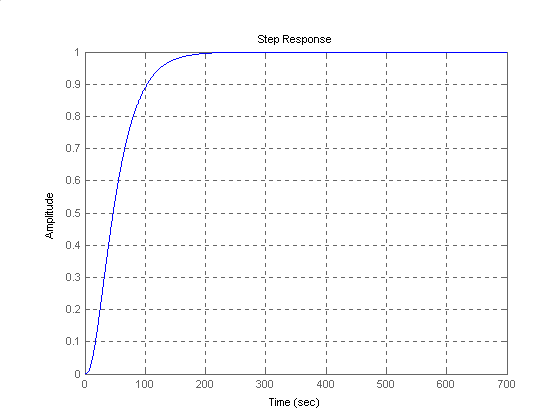
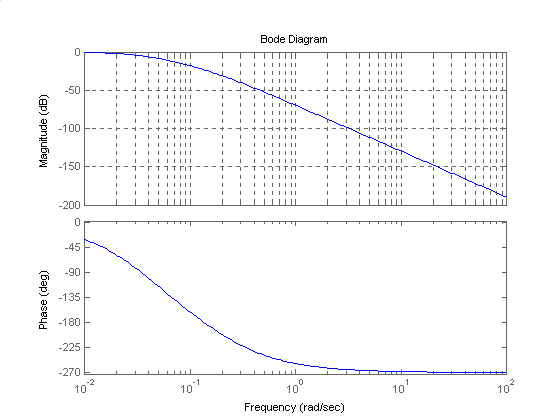
Jeżeli układ otwarty obejmiemy pętlą ujemnego sprzężenia zwrotnego o transmitancji H(s) = 1, to transmitancja układu zastępczego będzie wynosić:
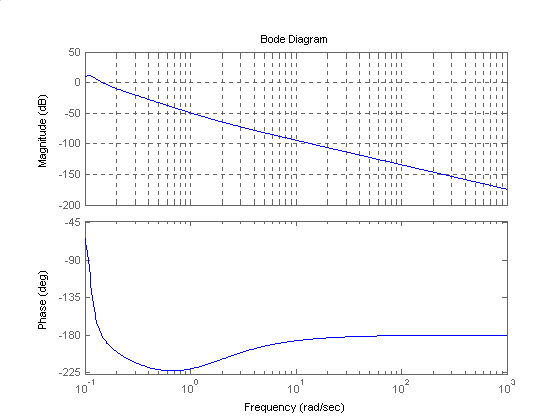
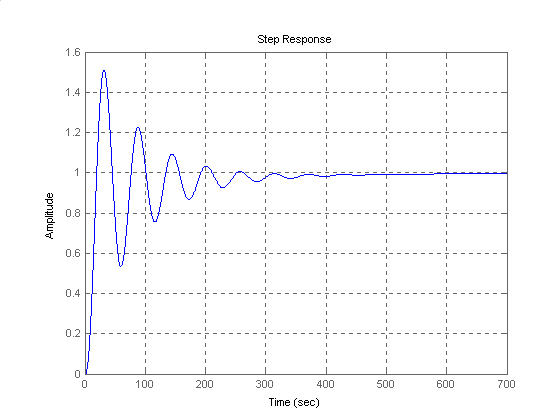
Można sprawdzić, że równanie charakterystyczne mianownika ma pierwiastki o częściach rzeczywistych w lewej półpłaszczyźnie Gauusa (układ stabilny), a w stanie ustalonym układ osiągnie amplitudę równą jedności (stosunek wyrazów wolnych licznika i mianownika).
Wpływ zmian wartości nastawów na odpowiedź układu:
Transmitancja badanego obiektu:
Transmitancja czujnika w pętli sprzężenia zwrotnego:
.
Obliczanie nastawów regulatora dla tego obiektu z wykorzystaniem metody Zieglera- Nicholsa jest niepraktyczne, ponieważ zarówno zapas amplitudy i odpowiadająca mu częstotliwość graniczna mają nieskończone wartości. Ogólnie transmitancja regulatora ma postać:
Wtedy transmitancja zastępcza układu zamkniętego będzie miała postać:
Jak widzimy odpowiedź na wymuszenie skokowe tego układu ustali się na poziomie jedności niezależnie od wartości poszczególnych nastawów regulatora.
Zakładając następujące początkowe nastawy:
sprawdźmy jak zmienia się postać odpowiedzi układu przy zmianie jednego z nastawów (przy stałych pozostałych):
Regulator PID - stałe nastawy Ki i Kd:
Kd = 0,2 Ki = 0,5 |
Czas narastania tr [s] |
Przeregulowanie M.o [%] |
Czas ustalenia ts [s] |
Błąd w stanie ustalonym ess [%] |
Szerokość pasm bw [rad/s] |
Kp = 0,5 |
3,7164 |
0,4464 |
5,86 |
2,86*10-5 |
0,573 |
Kp = 5 |
0,8244 |
2,1973 |
2,257 |
1,0499 |
2,8282 |
Kp = 10 |
0,4541 |
23,3797 |
0 |
2,0676 |
4,6106 |
Widzimy, że wzrost parametru Kp powoduje poszerzenie pasma i zmniejszenie czasu narastania. Jednak zbyt duża wartość tego parametru powoduje silne przeregulowania (powstawanie oscylacji ).
Kp = 2 Kd = 0,2 |
Czas narastania tr [s] |
Przeregulowanie M.o [%] |
Czas ustalenia ts [s] |
Błąd w stanie ustalonym ess [%] |
Szerokość pasm bw [rad/s] |
Ki = 0,1 |
33,8931 |
0 |
81 |
1,0836 |
0,1447 |
Ki = 0,5 |
4,362 |
0 |
12,8 |
5,08*10-3 |
0,9448 |
Ki = 1,5 |
1,3369 |
15,6108 |
5,2 |
1,56*10-11 |
1,5024 |
Zmiany parametru Ki powodują takie same rezultaty jak zmiany współczynnika części proporcjonalnej jednak w mniejszym stopniu. Jedyna różnica - zwiększanie Ki powoduje znaczne zmniejszenie się błędu w stanie ustalonym (zaleta stosowania członu całkującego). Następuje poszerzenie pasma lecz w bardzo małym zakresie.
Kp = 2 Ki = 0,5 |
Czas narastania tr [s] |
Przeregulowanie M.o [%] |
Czas ustalenia ts [s] |
Błąd w stanie ustalonym ess [%] |
Szerokość pasm bw [rad/s] |
Kd = 0,1 |
4,3054 |
0 |
12,84 |
0,0662 |
1,027 |
Kd = 0,5 |
4,6205 |
0 |
12,65 |
0,0552 |
0,7439 |
Kd = 1,5 |
5,4821 |
0 |
12,12 |
0,0281 |
0,476 |
Zwiększanie parametru Kd powoduje minimalne zwiększenie czasu narastania sygnału i równie małe zmniejszenie błędu ustalonego. Wadą jest zawężanie się pasma przy wzroście tego parametru.
Porównanie odpowiedzi różnych regulatorów na wymuszenie sygnałem referencyjnym i na wymuszenie sygnałem zakłócającym w postaci skoku jednostkowego przy zerowym sygnale referencyjnym.
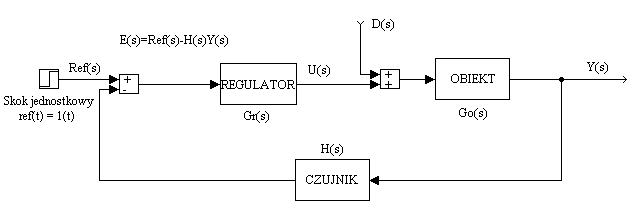
Ze schematu mamy:
oraz
. Przyjmujemy:
i
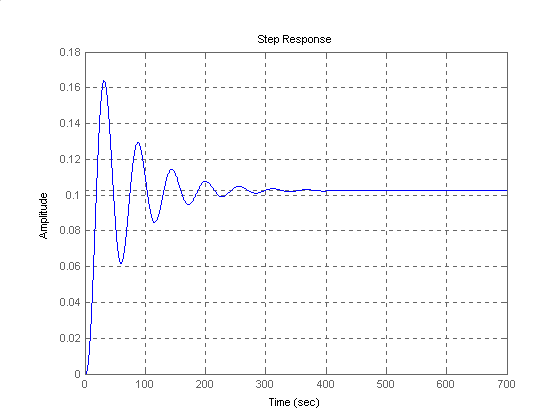
Regulator P:
Z metody Zieglera - Nicholsa mamy następujący nastaw:
Kp = 7,29. Mamy
Dla ref(t) = 1(t) i d(t) = 0 mamy:
Dla ref(t) = 0 i d(t) = 1(t) mamy:
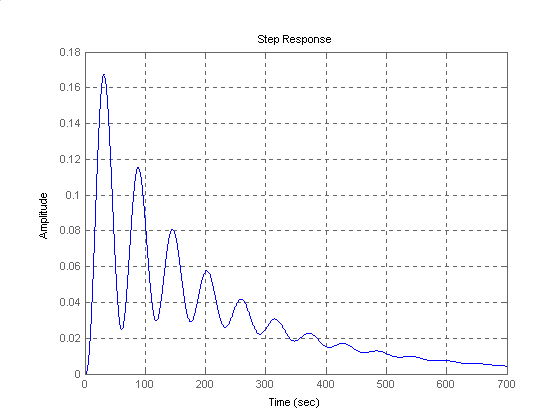
Regulator PD:
Z metody Zieglera - Nicholsa mamy następujący nastaw:
Kp = 8,75 i Kd = 5,8. Mamy
Dla ref(t) = 1(t) i d(t) = 0 mamy:
Dla ref(t) = 0 i d(t) = 1(t) mamy:
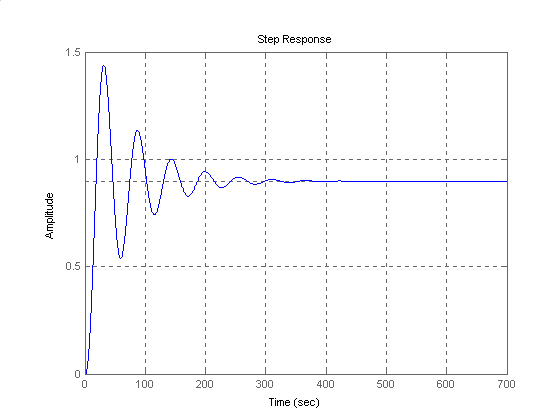
Regulator PI:
Z metody Zieglera - Nicholsa mamy następujący nastaw:
Kp = 8,75 i Ki = 0,0431. Mamy
Dla ref(t) = 1(t) i d(t) = 0 mamy:
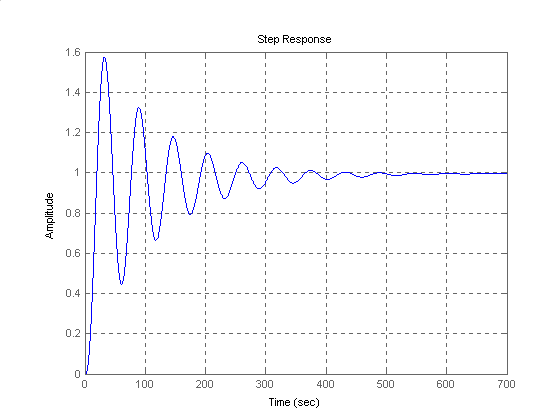
Dla ref(t) = 0 i d(t) = 1(t) mamy:
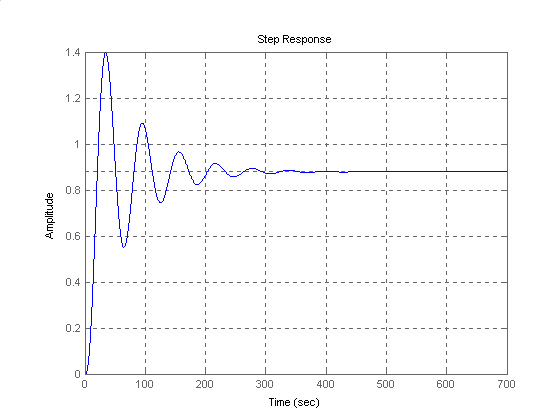
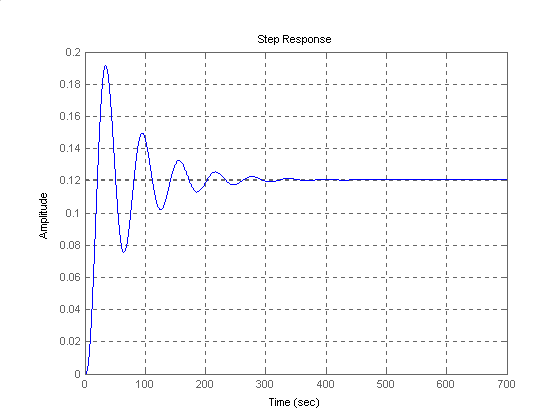
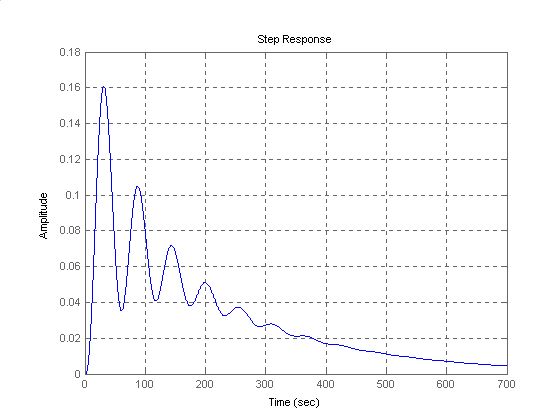
Regulator PID:
Wyliczone nastawy regulatora PID metodą Zieglera - Nicholsa:
mamy
Dla ref(t) = 1(t) i d(t) = 0 mamy:
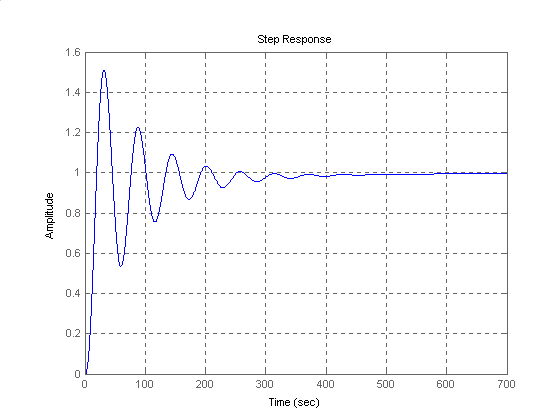
Dla ref(t) = 0 i d(t) = 1(t) mamy:
WNIOSKI:
Obiekt regulowany regulatorem PID ma najlepsze warunki pracy - zerowy uchyb sygnału oraz silne tłumienie sygnału szumu.
Regulator PI działa w bardzo podobny sposób jak PID ale czas ustalania się odpowiedzi jest w tym przypadku nieco dłuższy.
Tylko regulatory z częścią całkującą gwarantują zerowy uchyb oraz tłumienie do zera sygnałów zakłucających.
2
Wyszukiwarka
Podobne podstrony:
REGULACJA PID , Energetyka, sem5, sem5, met.ZN
BADANIE STATYCZNYCH I DYNAMICZNYCH WŁAŚCIWOŚCI REGULATORÓW PID
04Nastawy regulatora PID
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
Badanie układu sterowania z regulatorem PID
Regulator PID (2)
DOBÓR NASTAW REGULATORA PID
automaty-sprawko-pid, Temat ćwiczenia: REGULATORY PID
Regulator Pid
H Juszka i in Sterowanie logiczne z regulacja PID
PID-B, regulatory PID:
Ćw 6 Regulacja PID
Dobór parametrów regulatora PID – symulacja komputerowa
FAQ Konfiguracja regulatora PID
UKŁADY REGULACJI, układ regulacji PID
Regulator PID
Kwapisz strojenie regulatorów PID
Regulator PID
więcej podobnych podstron