AGH , Wydz. EAIiE Katedra Automatyki Napędu i Urządzeń Przemysłowych |
Imię , nazwisko : JAROSŁAW GANDZEL
|
||
TEORIA STEROWANIA I TECHNIKA REGULACJI
|
Semestr : letni.
|
||
Rok akademicki : 1998 / 99
|
Rok studiów : II |
Grupa : II |
|
Kierunek : ELEKTROTECHNIKA
|
środa , godz . 1000 .
|
||
Temat ćwiczenia : Układy wielowymiarowe . |
Nr ćwiczenia : 8 .
|
||
Data wykonania ćwiczenia : 10.03.1999.
|
Data zaliczenia sprawozdania : |
||
1. Model matematyczny silnika w przestrzeni stanu :
Zmienne stanu: x1 = ω(t) x2 = i(t)
Sterowania: u1 = u(t) u2 = Mm.(t)
Wyjścia: y1 = i(t) y2 = ω(t)
Równania stanu :
1.1. Macierzowe równania stanu:
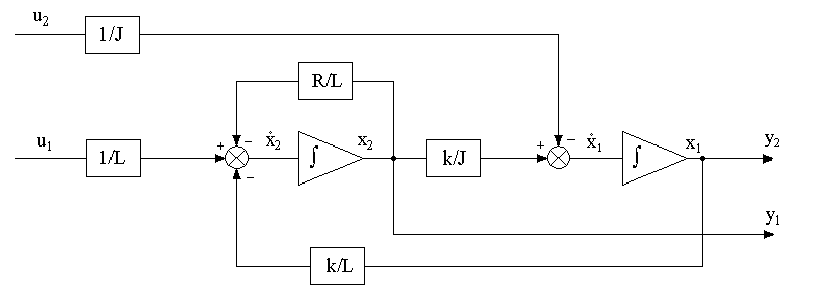
2. Schemat blokowy opisujący dynamikę silnika :
3. Wyznaczenie transmitancji zastępczej układu :
Transmitancje zastępczą układuwyliczam z poniższego wzoru :
Co w rezultacie daje :
3.1. Określenie poszczególnych transmitancji :
Schemat blokowy MIMO:
Dalsze obliczenia dokonywane są dla następujących danych :
R = 1,2[Ω] L = 0,2 [H] nN = 900[obr./min] IN = 70 [A]
UN = 220 [V] J = 8 [kg⋅m2]
4.1. Postać równań stanu silnika na macierzach ABCD - wartości numeryczne:
4.2. Postać numeryczna transmitancji GIU , GIM , GωU , GωM :
4.3. Transmitancja GZ(s) wyznaczona przy pomocy funkcji „ss2tf „ :
Transmitancje wymuszeniowe :
num(1) 5 s num(2) 0,9018
---------- = ----------------------- ---------- = ------------------------
den s^2 + 6 s + 1.301 den s^2 + 6 s + 1.301
Transmitancje zakłóceniowe:
num(1) 0.9018 num(2) -0.125 s - 0.75
---------- = ----------------------- ---------- = ------------------------
den s^2 + 6 s + 1.301 den s^2 + 6 s + 1.301
Z porównania transmitancji w pkt. 4.2 i 4.3 wnioskujemy iż transmitancja zastępcza wyliczona za pomocą funkcji matlaba „ss2tf” i składa się z dwóch par transmitancji równych GIM i GωM czyli transmitancjom wymuszeniowym : prądowej oraz prędkościowej oraz GIU i GωU czyli transmitancjom zakłóceniowym : prądowej oraz prędkościowej .
5. Odpowiedź układu opisanego macierzami ABCD na skok jednostkowy :
6. Przebiegi będące odpowiedziami na skok jednostkowy transmitancji GIU,GIM,GωU,GωM :
Na podstawie powyższych charakterystyk wnioskujemy iż w czasie załączenia zasilania początkowo prąd gwałtownie rośnie a następnie maleje do zera , natomiast prędkość rośnie i ustala się na pewnym poziomie . Odpowiedzi na zakłócenie uwidaczniają nam , że wzrost momentu powoduje zmniejszenie prędkości obrotowej silnika oraz zwiększenie prądu płynącego przez uzwojenia . Odpowiedzi układu są zgodne z oczekiwaniami .
7. Stałe czasowe silnika w postaci numerycznej:
Te = 0,1667 Tm =4,6107
8. Odpowiedź układu opisanego macierzami ABCD przy użyciu funkcji „ lsim „ dla następujących sygnałów wejściowych :
tsym = (0 ; 2⋅tk) gdzie: tk = max(Te ; Tm) ⋅ 20;
Z powyższej odpowiedzi układu widać zmiany prądu i prędkości obrotowej zarówno przy rozruchu silnika i wyłączeniu zasilania jak i przy załączaniu i wyłączeniu obciążenia. Szczególnie ciekawe jest zachowanie się prądu w momencie wyłączenia zasilania .Prąd gwałtownie rośnie w kierunku przeciwnym co jest zgodne z zasadą przekory ( prąd stara się podtrzymać obracanie się silnika ) .Co jest zgodne z oczekiwaniami .
9. Wyznaczenie transmitancji GIU , GIM , GωU , GωM przy zastosowaniu przekształceń Laplace'a:
9.1 Transmitancje GIU , GIM , GωU , GωM w postaci symbolicznej :
9.2. Poszczególne transmitancje w postaci symbolicznej z wykorzystaniem stałych czasowych :
9.3. Poszczególne transmitancje w postaci TF :
9.4. Poszczególne transmitancje w postaci ZP :
Z porównania transmitancji z pkt. 4.2 z powyższymi wynikami wnioskujemy iż różnią się one między sobą ponieważ matlab nie potrafi skracać licznika i mianownika przez wspólny czynnik np:. liczbę lub „s” .Jeśli otrzymane wyniki z pkt. 9.3 sami uprościmy to uzyskamy identyczne transmitancje jak w pkt. 4.2 .
10. Przebiegi i(t) i ω(t) dla różnych wartości parametrów silnika przy następujących sygnałach wejściowych :
żółty - u(t) = UN⋅1(t) oraz różowy - M.m.(t) = 0
czerwony - R0=R ; niebieski - R1=0,5R ; zielony - R2=2R :
czerwony - L0=L ; niebieski - L1=0,05L ; zielony - L2=10L :
czerwony - J0=J ; niebieski - J1=0,1J ; zielony - J2=5J :
Z powyższych wykresów wnioskuję , że im większa rezystancja tym mniejsza jest wartość prądu rozruchowego i większa jest prędkość obrotowa silnika .Natomiast stała czasowa wykresu ω(t) rośnie wraz ze wzrostem rezystancji .
Zmiana indukcyjności nieznacznie wplywa na przebieg ω(t) .Duża indukcyjność zmniejsza prąd rozruchowy , ale już nie w tak istotny sposób jak zwiekszenie rezystancji.Co ciekawe dla indukcyjności 0.2 i 0.01 [H] obie charakterystyki mają podobny przebieg .
Zwiększenie momentu bezwładności wpływa ujemnie na właściwości dynamiczne silnika - warunek równowagi osiągany jest po dużo dłuższym czasie.
1
8
Wyszukiwarka
Podobne podstrony:
TSS Projekt silnika
Projekt 2 silniki
projekt zagospodarowania przestrzennego
Projekt silnika z magnesami trwalymi v9
Projekt Silniki
Opis UAR w przestrzeni stanu
Pytania i odpowiedzi - projektowanie, UP Wrocław Ogrodnictwo, III rok, Projektowanie zieleni w przes
projekt silniki id 399540 Nieznany
Temat nr 1 jj 2011, PW SiMR, Inżynierskie, Semestr V, syf2, projektowanie silnika
PROJEKT Z SILNIKÓW I, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od
Projekt silnika śmigłowcowego z wolną turbiną
Projekt z silników szeregowych1, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projek
Temat nr 2 jj 2011, PW SiMR, Inżynierskie, Semestr V, syf2, projektowanie silnika
projekt silniki 1
projekt silnik
Projekt z Silników Spalinowych, silniki spalinowe
więcej podobnych podstron