I - Opis stanowiska pomiarowego i przebieg ćwiczenia
Stanowisko składa się z mechanizmu korbowego z układem napinającym i głębokościomierza mikrometrycznego zamocowanych na płycie, co ustala jednoznaczne położenie elementów względem siebie. Korba połączona jest przegubowo z podporą stałą ( punkt A) i z korbowodem ( punkt B). Drugi koniec korbowodu również za pomocą przegubu zamocowany jest do suwaka i łącznika które mogą wykonywać ruch posuwisto zwrotny. W położeniu zerowym układu tj. gdy osie korby i korbowodu tworzą linię prostą suwak dociska przymocowaną do niego sprężynę. Głębokościomierzem dokonujemy pomiaru położenia przegubu B. Dalszy wysuw czujnika powoduje przesunięcie przegubu z położenia zerowego, a nacisk sprężyny powstanie w układzie momentu obrotowego starającego się wywołać ruch korby. Przesuw przegubu B realizujemy do momentu w którym moment obrotowy będzie większy od oporów wywołanych siłami tarcia w przegubach i nastąpi samoistne dalsze wychylenie przegubu. Ze śruby mikrometrycznej odczytujemy współrzędne położenia granicznego w którym układ znajdował się jeszcze w równowadze. Różnica współrzędnych położenia zerowego i granicznego jest szukanym parametrem X potrzebnym do wyznaczenia współczynnika tarcia w czopie mechanizmu korbowego.
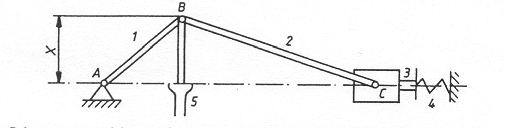
Rys. Schemat stanowiska pomiarowego
korba
korbowód
łącznik
sprężyna
głębokościomierz
II - wyniki pomiarów
Lp. |
Położenie zerowe |
Położenie graniczne |
Różnica położeń |
1 |
45,53 |
38,16 |
7,37 |
2 |
44,61 |
40,06 |
4,55 |
3 |
44,78 |
38,73 |
6,05 |
4 |
45,17 |
38,98 |
6,19 |
5 |
44,72 |
38,16 |
6,56 |
6 |
44,27 |
38,04 |
6,23 |
7 |
44,31 |
37,69 |
6,62 |
8 |
45,21 |
38,74 |
6,47 |
9 |
45,09 |
39,17 |
5,92 |
10 |
45,07 |
38,77 |
6,30 |
Wartość średnia - parametr X |
6,23 |
||
III - Obliczenie współczynnika tarcia:
Dane: X = 6,23 + 0,01 mm
R = 100 + 1,00 mm
L = 500+ 1,00 mm
ra = 10 + 0,05 mm
rb = 10 + 0,05 mm
Wyznaczenie błędu pomiarowego: :
du X (ra * L + rb * R + rb *L ) - (R*X + L*X)* rb
dR ( ra*L + rb*L + rb *R)2 = 0,000535
du X (ra * L + rb * R + rb *L ) - (R*X + L*X)* (ra + rb)
dL ( ra*L + rb*L + rb *R)2 = - 0,000051
du - (R*X + L*X)* L
d ra ( ra*L + rb*L + rb *R)2 = - 0,015446
du - (R*X + L*X)* (L * R)
d rb ( ra*L + rb*L + rb *R)2 = - 0,018536
du (R + L ) ( ra*L + rb*L + rb R)
dX ( ra*L + rb*L + rb *R)2 = 0,054545
= 0,000535 = R
= - 0,000051 = L
= - 0,000772 = r
= - 0,000927 = r
= 0,000545 = X
u = 0,34 + 0,0015
IV- Wnioski
Według danych katalogowych współczynnik tarcia posuwistego brązu o żeliwo wynosi 0,21 co przy wykorzystaniu wzoru na współczynnik tarcia w czopach u = 1,57 u daje wartość 0.33. Wyznaczony w ćwiczeniu współczynnik tarcia u wynosi 0,34. Różnice w wielkości współczynników spowodowane są w głównej mierze z niedokładnego ustawienia położenia zerowego, a więc niedokładnego wyznaczenia parametru X. Błąd wynikający z niedokładności przyrządów pomiarowych wyznaczony metodą różniczki zupełnej wynosi 0,5% a więc ma dość mały wpływ na wynik pomiaru.
Wyszukiwarka
Podobne podstrony:
Mechanika techniczna(12)
Mechanika Semest I pytania egz
wykl 8 Mechanizmy
mechanizm mycia i prania
MECHANIKA II DYN
METODY KOMPUTEROWE W MECHANICE 2
08 BIOCHEMIA mechanizmy adaptac mikroor ANG 2id 7389 ppt
Mechanizm obrzęków
Mechanizmy swoistej immunoterapii alergii 3
mechanika kwantowa
Mechanizmy nadwrażliwości
Mechanika górotworu cz 3
Szkol Uszkodzenie ciała przez czynniki mechaniczne
schemat mechanika
więcej podobnych podstron