Siła wypadkowa – siła, która zastępuje działanie kilku sił, przyłożonych do tego samego ciała. Siła wypadkowa powoduje zmianę pędu ciała, zgodnie z drugą zasadą dynamiki.
Siła wypadkowa jest sumą wektorową sił działających na dane ciało. Siły, tworzące sumę wektorową nazywa się siłami składowymi. Siły składowe, mogą być rzeczywiście działającymi siłami lub składowymi innych sił.
W wypadku ciał rozciągłych znikanie siły wypadkowej nie oznacza, że nie ma żadnych skutków działania sił. Jeżeli poszczególne siły składowe zaczepione są w różnych punktach ciała, to może istnieć nieznikający wypadkowy moment siły, zmieniający obrót ciała. W wypadku ciał rozciągłych, które nie są doskonale sztywne, skutkiem działania sił może być jego odkształcenie.
W poprzednim punkcie wyznaczyliśmy współrzędne prędkości v i przyśpieszenia a w prostokątnym układzie współrzędnych x, y, z. Na podstawie takiego postę-94
powania nie można ustalić, jak porusza się punkt względem toru L i jak zmieniają
się moduły i kierunki wektorów prędkości v i przyśpieszenia a w funkcji przebytej
drogi l. W celu udzielenia odpowiedzi na postawione pytanie przyjmijmy w punkcie M lokalny układ współrzędnych prostokątnych o osiach s, n, b o kierunkach
odpowiednio stycznym s, normalnym n i binormalnym b do krzywej
w rozważanym punkcie M (rys. 5.4). Kierunki osi s, n, b takiego układu współrzędnych będą określone odpowiednio wersorami es, en i eb. Tak zdefiniowane wersory es, en i eb wyznaczają w każdym punkcie linii (toru) L prawoskrętny układ współrzędnych, który nazywamy układem naturalnym.

Składowe przyspieszenia: normalna i styczna
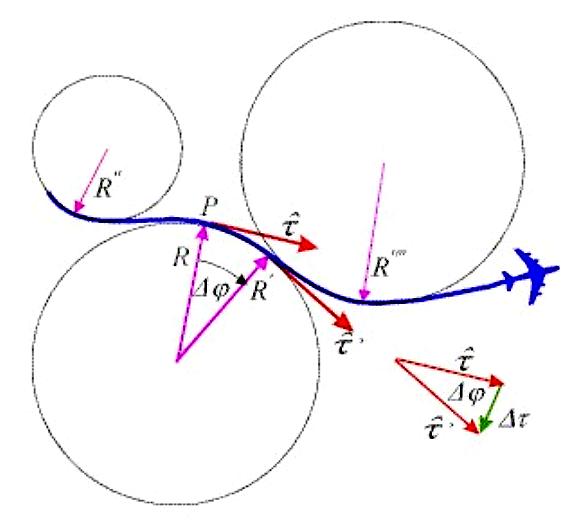 |
Na rysunku obok przedstawiony jest kolorem niebieskim przykładowy tor samolotu wykonującego ewolucje w powietrzu. Dla kilku punktów na torze zaznaczone są kolorem różowym promienie krzywizny i odpowiadające im okręgi. Kolorem czerwonym zaznaczone są wersory prędkości dla dwóch bliskich punktów na torze. Kolorem zielonym pokazany jest wektor różnicy tych wersorów. Kiedy odległość pomiędzy punktami na torze zdąża do zera, kierunek tego wektora staje się prostopadły do toru a jego długość wyrazić można za pomocą kąta dj. |
|---|---|
| Rys. 2.8. Przykładowy tor samolotu z zaznaczanymi w kilku punktach promieniami krzywizny. |
Wydzielony schemat na rysunku przedstawia kierunki wersorów dla dwóch punktów na torze oraz ich różnicę.
| (2.31) |
|---|
gdzie wersor ![]() jest prostopadły do toru, i pokrywa się z promieniem krzywizny toru w punkcie P. Promień krzywizny toru łączy się z kątem dj i odpowiadającą mu długością toru, czyli przebytą drogą ds, zależnością wynikającą, podobnie jak i w przypadku wzoru (2.20), z definicji kąta w mierze łukowej
jest prostopadły do toru, i pokrywa się z promieniem krzywizny toru w punkcie P. Promień krzywizny toru łączy się z kątem dj i odpowiadającą mu długością toru, czyli przebytą drogą ds, zależnością wynikającą, podobnie jak i w przypadku wzoru (2.20), z definicji kąta w mierze łukowej
| (2.32) |
|---|
Z kolei, przebyta droga, to iloczyn prędkości i czasu, czyli
| (2.33) |
|---|
Biorąc te zależności pod uwagę możemy zapisać pochodną wersora ![]() po czasie w postaci
po czasie w postaci
| (2.34) |
|---|
gdzie ![]() jest wersorem skierowanym do środka okręgu. Podstawiając znalezioną postać pochodnej wersora
jest wersorem skierowanym do środka okręgu. Podstawiając znalezioną postać pochodnej wersora ![]() po czasie możemy zapisać wzór (29) w postaci
po czasie możemy zapisać wzór (29) w postaci
| (2.35) |
|---|
W ten sposób przedstawiliśmy przyspieszenie w postaci dwóch prostopadłych do siebie składowych, których wartości bezwzględne wynoszą
 , , |
(2.36) |
|---|
Pierwsza skierowana zawsze zgodnie z aktualnym kierunkiem wektora prędkości, czyli styczna do toru w danym punkcie, nosi nazwę składowej stycznej , druga - skierowana do środka okręgu określającego aktualny promień krzywizny toru nosi nazwę składowej normalnej przyspieszenia i nazywana jest też przyspieszeniem dośrodkowym. Zauważmy, że ciało porusza się ruchem przyspieszonym także wtedy, kiedy bezwzględna wartość jego prędkości nie zmienia się, ale kiedy porusza się ruchem krzywoliniowym. Szczególnym przypadkiem takiego ruchu jest ruch po okręgu.
Prędkość kątowa w fizyce – wielkość wektorowa opisująca ruch obrotowy (np. ruch po okręgu). Jest wektorem (pseudowektorem) leżącym na osi obrotu i skierowanym zgodnie z regułą śruby prawoskrętnej.
Jeśli współrzędna kątowa ciała określa kąt θ to wartość prędkości kątowej ω jest równa:
![]()
Jednostka prędkości kątowej w układzie SI to jeden radian na sekundę.
Zależność chwilowej prędkości liniowej v, ciała poruszającego się po okręgu o promieniu r, od chwilowej prędkości kątowej ω tego ciała dana jest wzorem:
![]()
gdzie s jest długością łuku zakreślanego w czasie t. W zapisie wektorowym zależność przyjmuje postać:
![]()

 Prędkość kątowa jest wielkością wektorową ω, której kierunek pokrywa się z osią obrotu, azwrot jest zgodny z regułą śruby prawoskrętnej
Prędkość kątowa jest wielkością wektorową ω, której kierunek pokrywa się z osią obrotu, azwrot jest zgodny z regułą śruby prawoskrętnej
Zasada pierwsza (zasada równoległoboku). Działanie dwóch sił P1 i P2 można zastąpić działaniem jednej siły R, działającej na ten sam punkt, będącej przekątną równoległobokuABCD zbudowanego na wektorach sił P1 i P2.
 Wypadkową R wyznaczamy ze wzoru
Wypadkową R wyznaczamy ze wzoru
![]()
W przypadku, gdy siły P1 i P2 działają wzdłuż jednej prostej i są zgodnie skierowane, wartość wypadkowej wynosi
![]()
Natomiast, gdy siły są przeciwnie skierowane i P2 =P1 , to
![]()
Zasada druga. Jeżeli do ciała przyłożone są dwie siły, to równoważą się one tylko wtedy, gdy mają tę samą linię działania, te same wartości liczbowe i przeciwne zwroty. Aby siły te równoważyły się, muszą być spełnione zależności
![]()
Zasada trzecia. Skutek działania dowolnego układu sił przyłożonego do ciała nie zmieni się, jeśli do tego układu dodamy lub odejmiemy dowolny układ równoważących się sił, czyli tzw. układ zerowy. Wynika stąd następujący wniosek: każdą siłę działającą na ciało sztywne można przesunąć dowolnie wzdłuż jej linii działania.
Zasada czwarta (zasada zesztywnienia). Jeżeli ciało odkształcalne znajduje się w równowadze pod działaniem pewnego układu sił, to również pozostanie w równowadze ciało doskonale sztywne (nieodkształcalne), identyczne z poprzednim, pod działaniem tego samego układu sił. Wynika stąd wniosek, że warunek konieczny i wystarczający do równowagi ciała sztywnego jest tylko warunkiem koniecznym, ale nie wystarczającym do równowagi ciała odkształcalnego.
Zasada piąta (zasada działania i przeciwdziałania).Każdemu działaniu towarzyszy równe co do wartości, o przeciwnym zwrocie i leżące na tej samej prostej przeciwdziałanie.
Zasada szósta (zasada oswobodzenia od więzów). Każde ciało nieswobodne można myślowo oswobodzić z więzów, zastępując ich działanie reakcjami, a następnie rozważać jako ciało swobodne znajdujące się pod działaniem sił czynnych i biernych (reakcji więzów).
Definicja momentu siły względem punktu i prostej. Para sił i jej własności.
Moment siły (moment obrotowy) siły F względem punktu O jest to iloczyn wektorowy promienia
wodzącego r, o początku w punkcie O i końcu w punkcie przyłożenia siły, oraz siły F:
Wektor momentu siły jest wektorem zaczepionym w punkcie O, a jego kierunek jest prostopadły do
kierunku płaszczyzny wyznaczonej przez wektor F i promień wodzący r. Jednostką momentu siły
jest Nm (niutonometr).
Określa się także moment siły względem osi, jest on równy rzutowi wektora momentu siły na tę
prostą. Współrzędne Mx, My i Mz wektora M nazywają się momentami siły względem
odpowiednich osi x, y i z.
Para sił w mechanice bryły sztywnej jest to układ dwóch sił przyłożonych do danego ciała, równych
sobie co do wartości i przeciwnie skierowanych, ale zaczepionych w różnych punktach tego ciała.
Siła wypadkowa pary jest równa zeru, dlatego przyłożenie do ciała pary sił nie zmienia jego
całkowitego pędu. Działanie pary sił na bryłę określamy wektorem, który nazywamy momentem
pary. Moment pary sił oblicza się jako iloczyn wartości siły i odległości pomiędzy siłami.
Pary sił nie można zastąpić jedną siłą. Pary sił nie da się zastąpić równoważnym układem
prostszym. Para sił, przyłożona do swobodnego ciała sztywnego, powoduje jego obrót dookoła osi
prostopadłej do płaszczyzny działania pary (płaszczyzny wyznaczonej przez przez proste działania
sił, które tworzą parę)
Twierdzenia o parach sił
Przy zastosowaniu metody zastępowania układów sił układami im równoważnymi powstały
twierdzenia o parach sił, które podano poniżej bez udowodnienia.
1. Działanie pary sił na ciało sztywne nie ulegnie zmianie, gdy parę przesuniemy w dowolne
położenie w jej płaszczyźnie działania.
2. Działanie pary sił na ciało sztywne nie ulegnie zmianie, gdy zmienimy siły pary i jej ramię
tak, aby wektor momentu pary został niezmieniony.
3. Działanie pary sił na ciało sztywne nie ulegnie zmianie, gdy parę sił przesuniemy na
płaszczyznę równoległą do jej płaszczyzny działania.
4. Działanie pary sił na ciało sztywne nie ulegnie zmianie, jeżeli moment pary się nie zmieni.
W praktyce para sił występuje wszędzie tam, gdzie mamy do czynienia z bryłą sztywną
zamocowaną w jednym punkcie, lub wzdłuż osi. Przyłożenie siły do dowolnego punktu bryły
powoduje pojawienie się w punkcie zamocowania siły reakcji więzów, tworzącej wraz z przyłożoną
klasyczną parę sił.

Kręt w ruchu obrotowym

Zależności między siłą F, momentem siły τ,pędem p oraz momentem pędu L.
| Mechanika klasyczna |
|---|
 |
Moment pędu punktu materialnego o pędzie p, którego położenie opisane jest wektorem wodzącym r względem danego układu odniesienia(wybranego punktu, zwykle początku układu współrzędnych), definiuje się jako wektor (pseudowektor) będący rezultatem iloczynu wektorowegowektora położenia i pędu
![]()
Z własności iloczynu wektorowego wynika, że wartość bezwzględna momentu pędu jest równa
![]()
gdzie θ oznacza kąt między wektorami r i p.
Dla ciała o momencie bezwładności I obracającego się wokół ustalonej osi z prędkością kątową ω moment pędu można wyrazić wzorem
![]()
Ruch obrotowy bryły sztywnej to taki ruch, w którym wszystkie punkty bryły poruszają się po okręgach o środkach leżących na jednej prostej zwanej osią obrotu. Np. ruch Ziemi wokół własnej osi. Jest to ruch złożony z ruchu postępowego środka masy danego ciała oraz ruchu obrotowego względem pewnej osi. Środek masy ciała można uważać za punkt materialny. Do opisania ruchu obrotowego używa się odmiennych pojęć od używanych do opisania ruchu postępowego.
Podstawowym prawem opisującym ruch bryły sztywnej jest druga zasada dynamiki ruchu obrotowego:
![]()
gdzie
![]()
gdzie M jest momentem siły względem obranego punktu odniesienia, a L - krętem (momentem pędu) względem tego samego punktu odniesienia.
Jeżeli obrót odbywa się względem osi stałej lub sztywnej wówczas druga zasada dynamiki dla ruchu obrotowego może być napisana w następujący sposób:
![]()
gdzie M oznacza moment siły a I moment bezwładności względem osi obrotu.
Gdy brak momentu sił zewnętrznych (M = 0), z pierwszego wzoru można otrzymać równanie ilustrujące zasadę zachowania momentu pędu
![]()
![]()
Gdy oś obrotu jest ustalona, brak momentu sił oznacza stałość prędkości kątowej, ponieważ
![]()
co przy stałości I oznacza
![]()
Twierdzenie Königa – twierdzenie o energii kinetycznej ciała sztywnego.
Energia kinetyczna ciała sztywnego jest równa sumie energii kinetycznej ruchu postępowego środka masy i ruchu obrotowego względem osi w środku masy, równoległej do wektora prędkości kątowej
![]()
gdzie:
![]() – masa ciała,
– masa ciała,
![]() – prędkość liniowa środka masy,
– prędkość liniowa środka masy,
![]() – prędkość kątowa bryły,
– prędkość kątowa bryły,
– moment bezwładności bryły.
Siły wewnętrzne – siły występujące pomiędzy elementami układu ciał. Nazwa wewnętrzne odróżnia je od oddziaływań zewnętrznych, pochodzących spoza tego układu.
W teorii konstrukcji siły wewnętrzne, nazywane również siłami przekrojowymi, są to siły pomiędzy częściami (fragmentami) ciała, powstałymi na skutek rozdzielenia tego ciała przekrojem. Przykładem są siły wewnętrzne w przekroju A ciała z rysunku poniżej – są to: wypadkowe sił przekrojowych WA oraz wypadkowe momentów przekrojowych MA.
Zgodnie z III zasadą dynamiki, na przekroje obu rozdzielonych części ciała działają takie same co do wartości i kierunku, ale o przeciwnym zwrocie siły, jak para sił przekrojowych WA oraz –WAlub para momentów przekrojowych MA oraz –MA.
W wytrzymałości materiałów są to siły pojawiające się wewnątrz ciała, pod wpływem działania sił zewnętrznych. Stąd też siły wewnętrzne traktuje się jako siły bierne a obciążenia zewnętrznejako siły czynne.

W ciele poddanym siłom zewnętrznym można dokonać dowolnego przekroju – np. A jak na rysunku. Przekrój ten można podzielić na skończoną liczbę obszarów i dla każdego z nich wprowadzić siłę wewnętrzną W. Otrzymany w ten sposób zespół sił daje się zredukować do pary wektorów po każdej ze stron przekroju – siły WA, zwanej wektorem głównym (siłą przekrojową), oraz momentu siły MA, zwanego momentem ogólnym (momentem przekrojowym). W rzeczywistości siły te nie występują w postaci sił skupionych w jednym punkcie (biegunie) przekroju, ale przekazywane są w postaci naprężeń przez całą jego powierzchnię. Siły przekrojowe WA i MA są tylko wypadkowymi tych naprężeń, zebranymi w jednym punkcie A, zwanym biegunem redukcji. Zwykle siły przekrojowe redukuje się do środka ciężkości przekroju. Pary wektorów dla każdej strony przekroju mają ten sam kierunek, są równe co do wartości (długość wektora), lecz przeciwnie skierowane (mają przeciwne zwroty), więc gdy układ jest rozpatrywany jako całość, ich suma wektorowa jest równa zeru.
Siły przekrojowe najczęściej wyznacza się w obliczeniach konstrukcji prętowych (płaskich i przestrzennych), takich jak: belki, kratownice, ramy, łuki, ruszty, itp. Oblicza się wówczas siły w przekrojach prostopadłych do osi prętów i rozróżnia je w zależności od tego, jak działają w stosunku do osi pręta i jego przekroju.
Dla elementów prętowych można przyjąć następujący układ współrzędnych: oś OZ jest osią pręta a płaszczyzna OXY jest płaszczyzną przekroju prostopadłą do osi OZ.

![]()
Siły wewnętrzne w przekroju A-A belki obciążonej w płaszczyźnie pionowej
W przypadku gdy elementy prętowe konstrukcji i jej obciążenia leżą w jednej płaszczyźnie, mówi się o płaskim ustroju prętowym. W takim przypadku 3 niezerowe wielkości wewnętrzne (rysunek v.s.) leżą w płaszczyźnie ustroju:
siła osiowa N – prostopadła (normalna) do przekroju, działająca wzdłuż osi pręta OZ;
siła tnąca T – styczna do przekroju, zwana poprzeczną, gdyż działa w poprzek osi pręta (w kierunku OY);
moment zginający M – "gnący" względem osi OX prostopadłej do płaszczyzny ustroju.
Przykładem może być belka, rama płaska, łuk płaski.
W przestrzennych ustrojach prętowych, których elementy i obciążenia są dowolnie położone w przestrzeni, różne od zera są wszystkie wielkości wewnętrzne (3 siły i 3 momenty):
siła osiowa N – prostopadła (normalna) do przekroju, czyli działająca wzdłuż osi pręta OZ;
moment skręcający Mz – "kręcący" wokół osi pręta OZ, w płaszczyźnie OXY (oznaczany też Ms);
dwie, prostopadłe do siebie, siły poprzeczne (tnące) Tx i Ty – działające w kierunkach OX i OY, prostopadłych do osi pręta OZ;
dwa momenty zginające My i Mx, "gnące" wokół oznaczonych indeksami osi.
Ruszt tworzą poziome, krzyżujące się w dwóch kierunkach (np. OX i OZ), pręty obciążone pionowo (OY). W ich przekrojach wstępują 3 wielkości wewnętrzne:
siła poprzeczna T – działa w kierunku pionowym (OY),
moment zginający M – zgina względem osi prostopadłej do osi pręta,
moment skręcający Ms – względem osi pręta.
W przypadku kratownicy (płaskiej i przestrzennej) siły przekrojowe redukują się do sił osiowych N.
Pojęcie siły wewnętrznej istotne jest dla zdefiniowania pojęcia naprężenia. To naprężenia są faktycznymi wielkościami występującymi w przekrojach prętów. Siły wewnętrzne są jedynie wypadkowymi odpowiednich naprężeń, "zsumowanych" po powierzchni przekroju.
Wzór Eulera – wzór analizy zespolonej wiążący funkcje trygonometryczne z zespoloną funkcją wykładniczą określany nazwiskiemLeonharda Eulera.
Niech ![]() , zaś
, zaś ![]() jest jednostką urojoną, wtedy wzór Eulera ma postać
jest jednostką urojoną, wtedy wzór Eulera ma postać
![]() .
.
Współrzędne sferyczne
Współrzędne sferyczne punktu ![]() w przestrzeni można określić następująco:
w przestrzeni można określić następująco: ![]() jest odległością punktu
jest odległością punktu ![]() od początku układu
od początku układu ![]() . Punkt
. Punkt ![]() leży zatem na sferze
leży zatem na sferze ![]() o środku w początku układu
o środku w początku układu ![]() i promieniu
i promieniu ![]() .
. ![]() jest "szerokością geograficzną" punktu
jest "szerokością geograficzną" punktu ![]() na sferze
na sferze ![]() (liczoną jako kąt dodatni dla
(liczoną jako kąt dodatni dla ![]() powyżej płaszczyzny
powyżej płaszczyzny ![]() , a jako kąt ujemny dla
, a jako kąt ujemny dla ![]() poniżej płaszczyzny
poniżej płaszczyzny ![]() ), natomiast
), natomiast ![]() jest "długością geograficzną" punktu
jest "długością geograficzną" punktu ![]() na sferze
na sferze ![]() (liczoną od płaszczyzny
(liczoną od płaszczyzny ![]() ). Zachodzą relacje:
). Zachodzą relacje:

gdzie ![]() ,
, ![]() ,
, ![]() .
.
Ruch postępowy punktu materialnego jest to każdy ruch tego punktu opisywany przy użyciu wielkości charakterystycznych dla ruchu postępowego
drogi S
w odróżnieniu od ruchu obrotowego opisywanego wielkościami kątowymi (kąta, prędkości kątowej, przyspieszenia kątowego).
Przykłady
Ruch punktu materialnego po okręgu można traktować w danej chwili jak ruch postępowy przypisując temu punktowi prędkość v (Rys. 1).
Z drugiej strony, czasem konieczne jest rozpatrywanie ruchu prostoliniowego jako obrotu wokół chwilowej osi. Na przykład przy wyznaczaniu prędkości kątowej jaką uzyska wahadło balistyczne po zderzeniu z pociskiem, wygodnie jest przypisać pociskowi poruszającemu się po linii prostej prędkość kątową względem osi wahadła (Rys. 2).


Rys.1 Rys.2
Ruch postępowy bryły sztywnej jest to taki ruch, w którym każdy z punktów bryły porusza się po takim samym torze w tym samym czasie. Tor ten może mieć dowolny kształt (nie musi być prostoliniowy).
W ruchu postępowym wszystkie punkty bryły poruszają się w danym momencie z jednakowymi prędkościami i przyspieszeniami. Tory ruchu dla wszystkich punktów są w tym ruchu takie same (czerwone linie na animacji). Rezultatem ruchu postępowego bryły sztywnej po dowolnym ustalonym czasie t jest przesunięcie równoległe bryły (translacja), co oznacza, że po tym czasie każdy punkt bryły zostaje przesunięty o ten sam wektor (niebieskie wektory na animacji).
Poza ruchem postępowym bryła może wykonywać ruch obrotowy wokół osi stałej lub chwilowej. Dowolny ruch bryły sztywnej można opisać jako złożenie (superpozycję) ruchu postępowego i obrotowego.
Definicja kątów Eulera opiera się na spostrzeżeniu, że dowolnie zorientowany układ współrzędnych ![]() można otrzymać z danego układu
można otrzymać z danego układu ![]() przez złożenie trzech obrotów wokół osi układu. Istnieje kilka takich kombinacji obrotów; wybór konkretnej z nich jest w dużej mierze kwestią konwencji.
przez złożenie trzech obrotów wokół osi układu. Istnieje kilka takich kombinacji obrotów; wybór konkretnej z nich jest w dużej mierze kwestią konwencji.
Załóżmy na razie, że osie ![]() i
i ![]() nie są równoległe, a zatem płaszczyzna
nie są równoległe, a zatem płaszczyzna ![]() jest dobrze określona. Wówczas jedynym obrotem, który przekształca oś
jest dobrze określona. Wówczas jedynym obrotem, który przekształca oś ![]() na oś
na oś ![]() , jest obrót o odpowiedni kąt wokół linii węzłów
, jest obrót o odpowiedni kąt wokół linii węzłów ![]() , tj. prostej prostopadłej do płaszczyzny
, tj. prostej prostopadłej do płaszczyzny ![]() w punkcie
w punkcie ![]() . Linia węzłów, jako prostopadła do obu osi
. Linia węzłów, jako prostopadła do obu osi ![]() i
i ![]() , jest prostą, wzdłuż której przecinają się płaszczyzny
, jest prostą, wzdłuż której przecinają się płaszczyzny ![]() i
i ![]() . Tak więc układ
. Tak więc układ ![]() można nałożyć na
można nałożyć na ![]() , dokonując kolejno następujących trzech obrotów:
, dokonując kolejno następujących trzech obrotów:
obrotu wokół osi ![]() , takiego aby oś
, takiego aby oś ![]() pokryła się z linią węzłów
pokryła się z linią węzłów ![]()
obrotu wokół osi ![]() (
(![]() ), takiego aby oś
), takiego aby oś ![]() pokryła się z osią
pokryła się z osią ![]()
obrotu wokół osi ![]() (
(![]() ), takiego aby oś
), takiego aby oś ![]() pokryła się z osią
pokryła się z osią ![]() (wówczas również oś
(wówczas również oś ![]() pokryje się z osią
pokryje się z osią ![]() ).
).
Zauważmy, że powyższe warunki wyznaczają dwie różne sekwencje obrotów, gdyż w kroku 1. istnieją dwa obroty (o kąty różniące się o ![]() ) prowadzące do ustawienia osi
) prowadzące do ustawienia osi ![]() wzdłuż linii węzłów w, lecz nadające jej przeciwne zwroty. Wybieramy zwrot zgodny ze zwrotemiloczynu wektorowego wersorów osi
wzdłuż linii węzłów w, lecz nadające jej przeciwne zwroty. Wybieramy zwrot zgodny ze zwrotemiloczynu wektorowego wersorów osi ![]() i
i ![]()
![]() (przyjmując go za zwrot osi węzłów). Obrót 2. będzie więc zawsze obrotem o kąt z zakresu
(przyjmując go za zwrot osi węzłów). Obrót 2. będzie więc zawsze obrotem o kąt z zakresu ![]() .
.
Poszczególne kąty Eulera ![]() parametryzują powyższe trzy obroty; definiujemy je zatem następująco:
parametryzują powyższe trzy obroty; definiujemy je zatem następująco:
![]() — kąt mierzony od osi
— kąt mierzony od osi ![]() do osi węzłów
do osi węzłów ![]() w kierunku wyznaczonym osią
w kierunku wyznaczonym osią ![]() ; jest to kąt obrotu 1.
; jest to kąt obrotu 1.
![]() — kąt mierzony od osi węzłów
— kąt mierzony od osi węzłów ![]() do osi
do osi ![]() w kierunku wyznaczonym osią
w kierunku wyznaczonym osią ![]() ; jest to kąt obrotu 3.
; jest to kąt obrotu 3.
![]() — kąt mierzony od osi
— kąt mierzony od osi ![]() do
do ![]() w kierunku wyznaczonym osią węzłów
w kierunku wyznaczonym osią węzłów ![]() ; jest to kąt obrotu 2.
; jest to kąt obrotu 2.
W ten sposób każdemu obrotowi układu współrzędnych w przestrzeni, nie zachowującemu zwrotu ani kierunku osi ![]() , można wzajemnie jednoznacznie przypisać uporządkowaną trójkę kątów
, można wzajemnie jednoznacznie przypisać uporządkowaną trójkę kątów ![]() .
.
Osobnej uwagi wymaga sytuacja, gdy osie ![]() i
i ![]() są równoległe (identyczne lub o przeciwnych zwrotach). Płaszczyzna
są równoległe (identyczne lub o przeciwnych zwrotach). Płaszczyzna ![]() i linia węzłów nie są wówczas jednoznacznie określone; oś
i linia węzłów nie są wówczas jednoznacznie określone; oś ![]() można przekształcić na oś
można przekształcić na oś ![]() w wyniku obrotu (o kąt
w wyniku obrotu (o kąt ![]() lub
lub ![]() , zależnie od zwrotu osi
, zależnie od zwrotu osi ![]() ) wokół dowolnej prostej przechodzącej przez punkt
) wokół dowolnej prostej przechodzącej przez punkt ![]() i leżącej w płaszczyźnie
i leżącej w płaszczyźnie ![]() . Mamy zatem
. Mamy zatem ![]() lub
lub ![]() , a ustawienie osi
, a ustawienie osi ![]() ,
, ![]() jest jednoznacznie wyznaczone odpowiednio przez sumę lub różnicę kątów
jest jednoznacznie wyznaczone odpowiednio przez sumę lub różnicę kątów ![]() i
i ![]() .
.

Kąty Eulera dla prawoskrętnych układów współrzędnych
Wyszukiwarka
Podobne podstrony:
Opracowanka, warunkowanie
OPRACOWANIE FORMALNE ZBIORÓW W BIBLIOTECE (książka,
postepowanie w sprawach chorob zawodowych opracowanie zg znp
opracowanie 7T#2
opracowanie testu
Opracowanie FINAL miniaturka id Nieznany
Opracowanie dokumentacji powypadkowej BHP w firmie
przetworniki II opracowane
Opracowanie Programowanie liniowe metoda sympleks
Nasze opracowanie pytań 1 40
haran egzamin opracowane pytania
201 Czy wiesz jak opracować różne formy pisemnych wypowied…id 26951
IE opracowanie 2013r dr J Barcik
3 2 LN Energetyka ECiJ EgzaminDyplomowy OpracowaneZagadnienia eksploatacyjne WentylatorIPompy(1)
MIERNICTWO 1 OPRACOWANIE PEŁNE (30 01 14)
więcej podobnych podstron