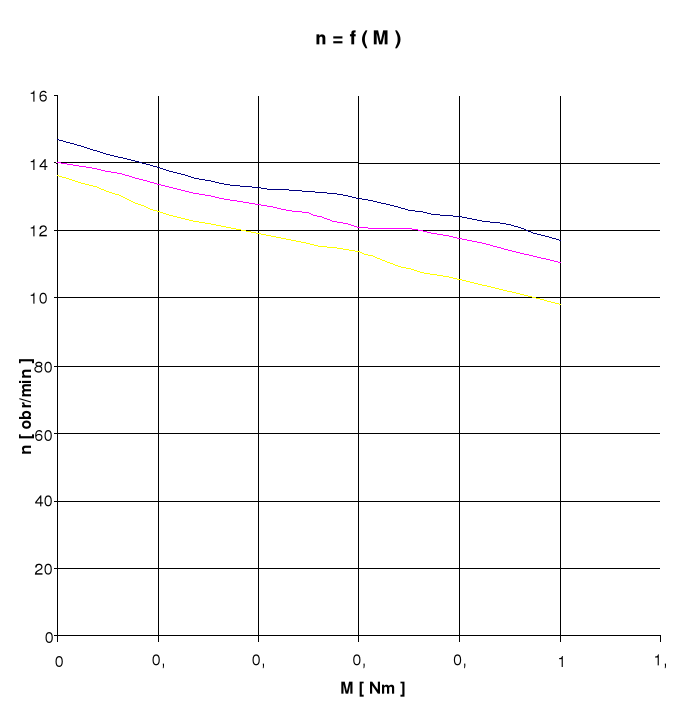
AD 1 :
Charakterystyki n = f ( M ) dla / 2 oraz dwóch różnych wartości współczynnika
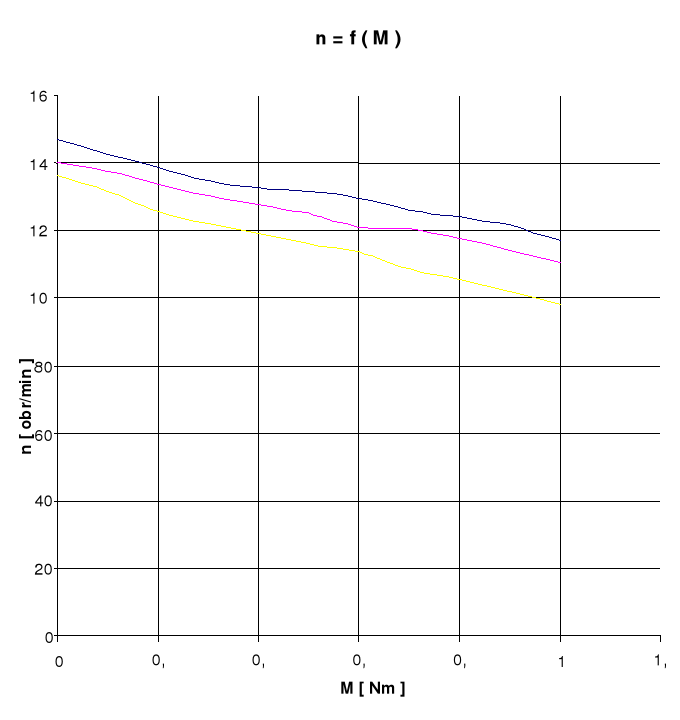
sygnału (,) :
----- [ ]
----- [ ]
----- [ ]
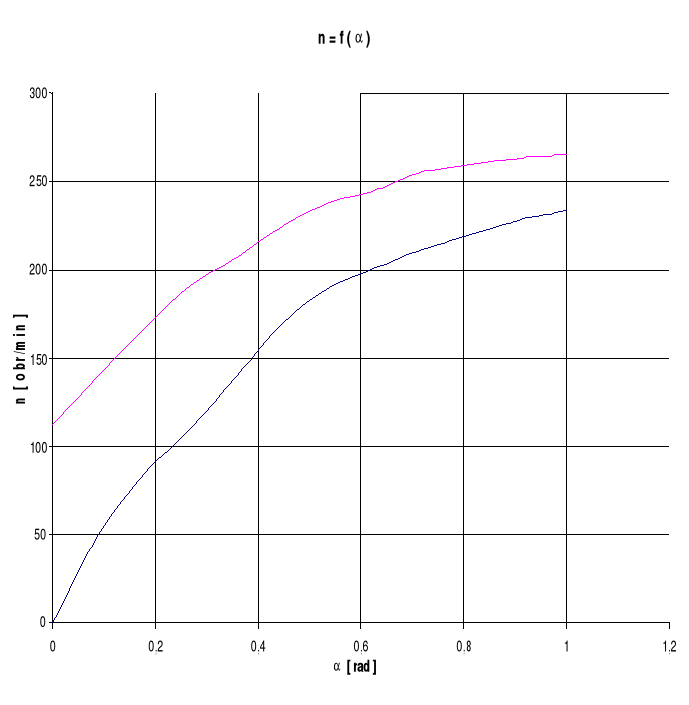
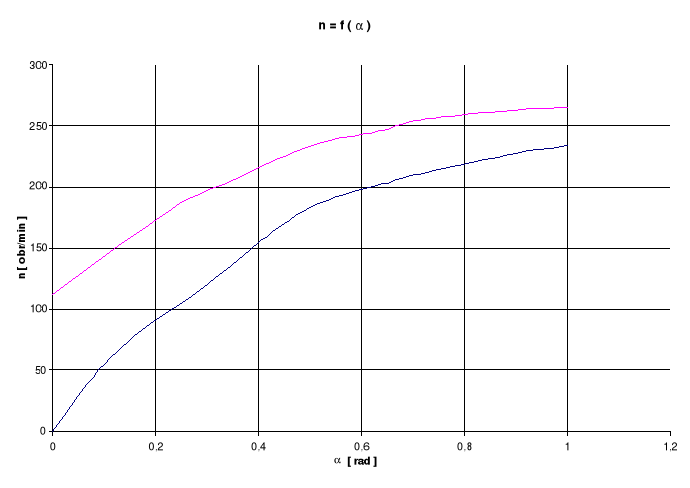
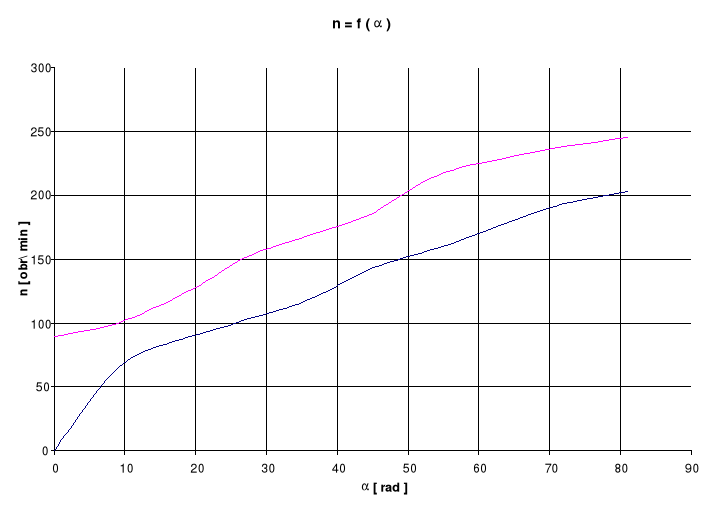
AD 2 :
Charakterystyki n =f ( ) dla / 2 oraz dwóch różnych wartości momentu obciążenia :
----- [ *
----- [ *
AD 3 :
Charakterystyki sterowania n = f ( ) dla = 1 oraz dwóch różnych wartości momentu obciążenia :
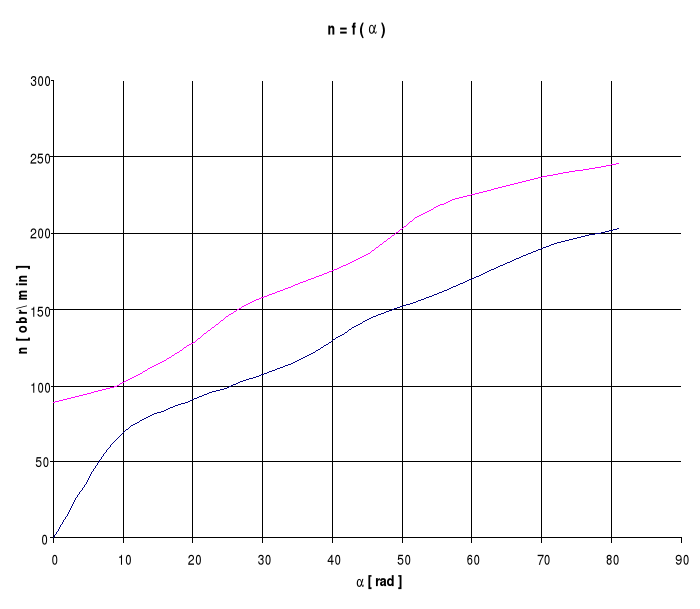
----- [ M*=0.6 ]
----- [
4. WNIOSKI.
Wykonaliśmy charakterystyki mechaniczne oraz sterowania silnika wykonawczego. Charakterystyki mechaniczne wykonaliśmy przy dwóch różnych wartościach współczynnika sygnału =Us / Uw ( ) i dla stałego kąta przesunięcia fazowego ( ) między napięciem sterującym a napięciem wzbudzenia. Z wykresów wynika, że najlepiej zachowywała się charakterystyka gdzie ( ) - charakteryzowała się ona się największymi wartościami n [ obr/min ]. Charakterystyki sterowania były wykonywane dla dwóch różnych sposobów sterowania silnikiem wykonawczym - sterowanie amplitudowe i sterowanie fazowe.
W pierwszym wypadku ( wykres 1 ) było to sterowanie amplitudowe const. n( przy momencie obciążenia M1=0 i M2=0.6 .W drugim przypadku ( wykres 2 ) było to sterowanie fazowe gdzie =const , n( ) i przy momencie obciążenia M1=0 , M2=0.6 . Pomiary te pozwalają na zweryfikowanie dwóch rodzajów sterowań : amplitudowego i fazowego. Zwiększenie momentu obciążenia powoduje wzrost stosunku liczby obrotów do współczynnika ( wykres 2 ), a także liczby obrotów do współczynnika ( wykres 3 ).
Niedokładności spowodowane są różnego rodzaju błędami ( np. paralaksy, metody, itp).
Wyszukiwarka
Podobne podstrony:
elektr lab WA, Silniki asynchroniczne dwufazowe
Sprawozdanie - renegat nasza wersja ad.2009 v3 (1), Szkoła, Politechnika 1- 5 sem, politechnika, 3 r
spis lab I sem 2010
Wyk ad 5 6(1)
III WWL DIAGN LAB CHORÓB NEREK i DRÓG MOCZ
Diagnostyka lab wod elektrolit
ZW LAB USTAWY, OCHRONA
LAB PROCEDURY I FUNKCJE
uk ad pokarmowy
Wyk ad II
Tkanki wyk ad 1
Ekonomika Transportu wyk+ad 1
więcej podobnych podstron