Kinematyka i Dynamika
Bogdan Wilczyński
Koszalin, 1994
Pojęcia podstawowe
Dynamika - badanie związków między ruchem ciał a siłami na to ciało działającymi.
Kinematyka - badanie ruchu ciał bez uwzględnienia przyczyn wywołujących ruch.
Ruch - zmiana połoźenia ciała względem innego ciała, zwanego ciałem odniesienia. Ciało odniesienia może być ruchome, lub nieruchome. Z ciałem odniesienia związany jest układ odniesienia (układ współrzędnych).
Ruch odbywa się w czasie i przestrzeni. Są to pojęcia pierwotne, których się nie definiuje.
Przestrzeń - przestrzeń trójwymiarowa, w szczególnym przypadku przestrzeń dwu- lub jednowymiarowa.
Czas - zbiór chwil, tak jak prosta składa się z punktów. Czas nie zależy od układu odniesienia, oraz jest nieograniczony, tzn. "płynie" od przeszłości do przyszłości.
Przedział czasu - gęsty i ciągły zbiór chwil zawarty między dwiema chwilami.
![]()
t = t2 - t1
t0 - chwila początkowa, zwykle t0 = 0.
Tor - linia jaką zakreśla w przestrzeni poruszający się punkt.
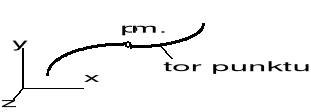
Rys.
Modele ciał materialnych
P-kt materialny Układ p-któw materialnych Ciało sztywne

Rys.
Kinematyka punktu materialnego (p.m.)
Sposoby opisu ruchu p.m.
Położenie punktu materialnego w przestrzeni Euklidesa (E3 ) opisujemy za pomocą:
1) współrzędnych naturalnych
2) współrzędnych kartezjańskich (prostokątnych)
3) promienia-wektora
4) współrzędnych biegunowych
5) innych współrzędnych, np. walcowych.
1) Opis ruchu w układzie naturalnym
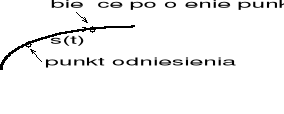
Rys.
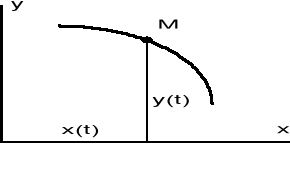
2) Opis ruchu w układzie kartezjańskim jedno- dwu- lub trójwymiarowym
Ruch prostoliniowy. Do opisu położenia p.m. wystarczy układ jednowymiarowy Ox.

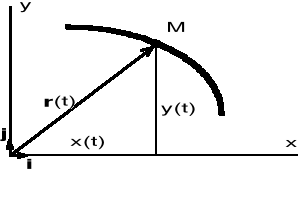
Ruch krzywoliniowy. Do opisu wystarczy układ dwuwymiarowy, jeśli ruch odbywa się w jednej płaszczyżnie, lub trójwymiarowy. Położenie punktu M na torze określają dwie (w przestrzeni trzy) współrzędne x i y zależne od czasu:
x = x(t) y = y(t)
3) Opis ruchu za pomocą wektora-promienia r
Dany jest tor punktu M. Położenie tego punktu na torze, w dowolnej chwili t możemy opisać za pomocą wektora r wychodzącego z dowolnie obranego punktu (punkt, ciało odniesienia) O. Przy ruchu p-ktu M wektor r (wektor-promień) zmienia swój moduł i kierunek. Zmiana wektora r jest więc funkcją czasu t.
r = r(t)
tor punktu M (hodograf wektora r)
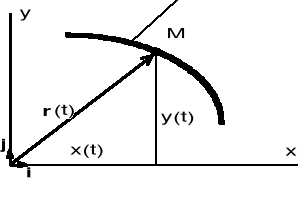
Z rys. mamy, że
r = r(t) = x i + y j, gdzie i, j - wersory.
Wyznaczanie prędkości i przyspieszeń
1) Gdy ruch jest opisany za pomocą wektora-promienia
Niech poruszający się punkt M znajduje się w chwili t w położeniu określonym wektorem r1, a w chwili t+t w położeniu M określonym wektorem r2 = r + r.
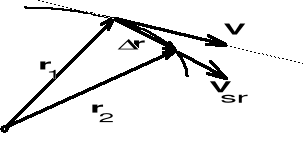
W czasie t wektor-promień r doznał przyrostu o wielkość r = r2 - r1. Stosunek przyrostu r do przyrostu t określamy jako prędkość średnią punktu
r/t = vśr
Wektor prędkości średniej jest skierowany wzdłuż wektora r. Przechodząc do granicy otrzymujemy wektor prędkości chwilowej v.
![]()
Def. Prędkość punktu jest wektorem określonym przez pierwszą pochodną wektora-promienia względem czasu, skierowanym wzdłuż stycznej do toru (hodografu wektora r).
Załóżmy, że w chwili t1 punkt znajduje się w położeniu M i ma prędkość v1, w chwili t2 w położeniu M i ma prędkość v2 , i.t.d.

Obieramy dowolny biegun O i przenosimy doń równolegle wszystkie wektory prędkości. W czasie t nastąpił przyrost wektora prędkości o wielkość v. Stosunek przyrostu wektora prędkości v do przyrostu czasu t nazywamy przyspieszeniem średnim punktu:
v/t = aśr
Przechodząc do granicy otrzymujemy:
![]()
Ostatecznie:
a = v = r.
Uwaga! - pierwsza pochodna względem czasu, - druga pochodna względem czasu.
Przyspieszeniem nazywamy wektor dany przez pierwsza pochodną wektora prędkości, lub drugą pochodną wektora-promienia względem czasu, skierowanym wzdłuż stycznej do hodografu wektora prędkości.
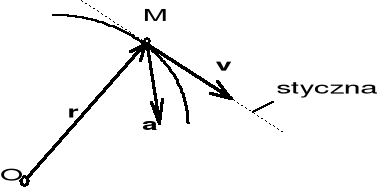
Podsumowanie. Poruszający się punkt M, którego położenie określa wektor-promień r, ma danej chwili t prędkość v styczną do toru (hodografu wektora r) i przyspieszenie a styczne do hodografu wektora prędkości. Wektory v i a nie pokrywają się. Wyjątkiem jest ruch prostoliniowy.
2) Gdy ruch opisują współrzędne kartezjańskie
Przyjmujemy w punkcie O (punkt odniesienia) kartezjański układ współrzędnych Oxy (Oxyz w przestrzeni trójwymiarowej). Jeżeli przez i, j, k oznaczymy wersory na odpowiednich osiach układu współrzędnych, to wektor-promień można przedstawić następująco:
r = r(t) = x i + y j (+ z k w układzie 3-ch osi).
Ponieważ wektor r = r(t) jest funkcją czasu, jego składowe równe współrzędnym punktu M są również funkcjami czasu:
x = x(t), y = y(t) (z = z(t)).
Powyższe równania noszą nazwę parametrycznych równań ruchu. Z powyższych równań rugując parametr t otrzymujemy równanie toru
f(x,y) = 0, lub f(x,y,z) = 0.
Z definicji prędkości mamy:
v = r = x i + y j = vx i + vy j,
gdzie: vx = dx/dt, vy = dy/dt są składowymi wektora prędkości v.
Moduł wektora prędkości wynosi:
v = (vx2 + vy2),
a kierunek wyznacza kąt , którego tangens wynosi:
tg = vy/vx.
Składowe wektora prędkości w układzie kartezjańskim równe są pierwszym pochodnym względem czasu odpowiednich współrzędnych poruszającego się punktu.
W układzie trójwymiarowym mamy jedną składową prędkości więcej (składowa vz), a do wyznaczenia kierunku wektora prędkości v obliczamy kosinusy kierunkowe, cos(v,x) = vx /v, i.t.d.
Analogicznie wyznaczamy składowe przyspieszenia a.
Z definicji:
a = v = vxi + vy j = xi + yj = axi + ayj,
gdzie: ax = vx = x, ay = vy = y są składowymi wektora przyspieszenia, a kierunek wektora przyspieszenia a określa kąt , którego tangens wynosi:
tg = ay /ax.
Trzecia składowa az wektora przyspieszenia a występuje gdy ruch odbywa się w przestrzeni trójwymiarowej.
Składowe przyspieszenia a w układzie kartezjańskim równe są pierwszym pochodnym względem czasu składowych prędkości tego punktu, czyli drugim pochodnym względem czasu odpowiednich współrzędnych.
Przykład
Dane są równania ruchu: x = rsinkt, y = rcoskt. Zbadać ruch punktu w dowolnej chwili t. (a - dowolny parametr)
1) Równanie toru:
Równania parametryczne ruchu dzielimy obustronnie przez a, i dodajemy stronami:
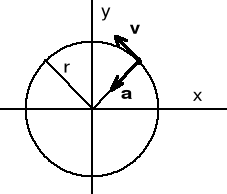
x2 + y2 = r2 (torem okrąg o promieniu a)
2) Prędkość:
Składowe prędkości po zróżniczkowaniu równań ruchu:
vx = rksinkt, vy = rkcoskt.
Moduł wektora prędkości:
v = ((r k sinkt)2 + (r k coskt)2) = rk = const.
3) Przyspeszenie:
Składowe wektora przyspieszenia:
ax = rk coskt = k x, ay = rk sinkt = k y.
Moduł wektora przyspieszenia:
a = ((k x)2 + (k y)2) = kr = const.
Przyspieszenie jest wprost proporcjonalne do promienia koła i skierowane do środka okręgu.
3) Gdy ruch opisują współrzędne naturalne.
Z poruszającym się punktem M związany jest układ współrzędnych naturalnych: oś styczna t, skierowana w kierunku ruchu, oś normalna n skierowana do środka krzywizny (w ruchu przestrzennym oś binormalna b).
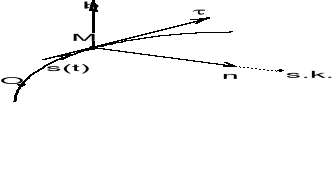
Polożenie. Położenie punktu M na torze wyznacza współrzędna łukowa s.
Stąd prawo ruchu zapisujemy następująco:
s = s(t).
Prędkość. Ponieważ ruch odbywa się w płaszczyźnie ściśle stycznej, wektor prędkości pokrywa się zawsze z kierunkiem osi stycznej.Wartość wektora prędkości średniej liczymy ze wzoru:
vśr = s/t,
natomiast wartość prędkości chwilowej, dla dowolnej chwili t, ze wzoru
v = lim s/t = s.
Wektor prędkości możemy zatem zapisać:
v = v,
gdzie t jest wersorem na osi .
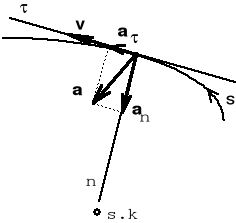
Przyspieszenie. Można wykazać, źe przyspieszenie punktu jest wektorem leżącym w płaszczyżnie osi n (płaszczyżnie ściśle stycznej). Różniczkując względem czasu wyrażenie na prędkość v mamy:
a = v = v + v . (v = dv/dt, = d/dt)
Ale
d/dt = dds/dtds = ds/dt d/ds = v n/
gdzie:
d/ds = n/ (wzór Freneta).
a jest promieniem krzywizny w punkcie M.
Ostatecznie mamy:
a = a + an n,
gdzie:
a = v = s - nazywamy przyspieszeniem stycznym,
an = v2/ - nazywamy przyspieszeniem normalnym.
Wartość przyspieszenia całkowitego liczymy ze wzoru:
a = (a2 + an2).
Zarówno wektor prędkości v jak i wektor przyspieszenia a we współrzędnych naturalnych przedstawiono na rys. poniżej
Ruch po okregu koła.
W ruchu po okręgu koła definiuje się następujące pojęcia:
Predkość kątowa:
śr = /t - prędkość kątowa średnia,
= lim /t , gdy t 0 - prędkość kątowa chwilowa,
śr = /t - przyspieszenie kątowe średnie,
= lim /t , gdy t 0 - przyspieszenie kątowe chwilowe,
Wtedy ponieważ
s = r,
to po zróźniczkowaniu
v = sr = r,
Stąd składowe przyspieszenia:
a = v = r = r
an = v2/r = 2r.
Ruch złożony punktu - terminologia, podstawowe zależności kinematyczne
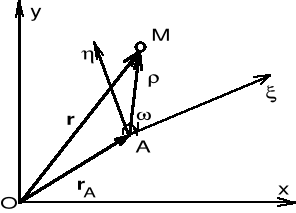
Oxy - układ bezwzględny
A - układ ruchomy
- prędkość kątowa układu ruchomego
Ruch punktu M względem układu nieruchomego nazywamy ruchem bezwzględnym.
Ruch punktu M wzgledem układu ruchomego nazywamy ruchem względnym.
Ruch układu ruchomego wzgledem układu nieruchomego nazywamy ruchem unoszenia.
W dowolnej chwili połóżenie ruchomego punktu M możemy określić za pomocą promieni-wektorów spełniających zależność
r = rA + .
Wyznaczanie predkości w ruchu złożonym.
W ruchu złożonym prędkość bezwzględna jest sumą geometryczną prędkości względnej i prędkości unoszenia:
v = vr + ve.
Wyznaczanie przyspieszenia w ruchu złożonym.
W ruchu złożonym przyspieszenie bezwzględne jest sumą geometryczną przyspieszenia względnego, przyspieszenia unoszenia oraz przyspieszenia Coriolisa:
a = ar + ae + ac
gdzie: ac = 2v - przyspieszenie Coriolisa.
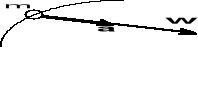
Przykład
Wzdłuż pręta OA porusza się suwak M ze stała prędkością w. Znaleźć prędkość i przyspieszenie bezwględne suwaka w chwili, gdy znajduje się on w odległości r od osi obrotu O preta OA obracającego się ze stałą prędkością kątową .
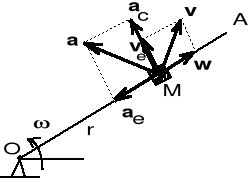
Prędkość względna:
vr = w.
Prędkość unoszenia:
ve = r.
Prędkość bezwzględna:
v = (vr2 + ve2) = ( w2 + 2r2).
Przyspieszenie wzgledne: ar = 0, bo w = const.
Przyspieszenie unoszenia:
ae = 2r.
Przyspieszenie Coriolisa:
ac = 2w, bo sin kąta pomiędzy wektorami a w wynosi 90o.
Przyspieszenie bezwzględne:
a = (a + a) = (4r2 + 42w2).
Dynamika punktu materialnego (p.m.)
Dynamika opiera się na prawach Newtona, a w szczególności na drugim prawie. Można wykazać, źe prawa Newtona są słuszne w układach odniesienia poruszających się ruchem jednostajnie prostoliniowym (układy odniesienia Galileusza lub inercjalne)
I prawo (prawo bezwladności)
Jeśli suma sił działających na p.m. jest równa zeru, to ciało porusza się ze stałą prędkością, lub pozostaje w spoczynku.
II prawo
Oznaczenie: p = mv - pęd (ilość ruchu).
Zmiana pędu w czasie jest równa sile działającej i zachodzi w kierunku działania siły.
d(mv)/dt = W, gdzie: W = Pi , i = 1,...,n
jest wypadkową układu sił działających na punkt :
Gdy m = const
mdv/dt = W.
Ponieważ, z definicji:
dv/dt = a
to
ma = W.
III prawo (prawo akcji i reakcji)
Dwa punkty materialne oddziaływują na siebie z siłami równymi co do wielkości lecz skierowanymi przeciwnie.
Formułowane są jeszcze:
Prawo powszechnego ciążenia.
Zasada niezależności działania sił.
Typy zagadnień występujących w dynamice.
Zagadnienia dynamiki, które symbolicznie przedstawiono na rys. dzielimy na dwa podstawowe typy:
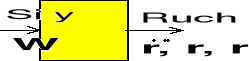
1) proste - Dany jest ruch ciała. Wyznaczyć siły działające.
2) odwrotne - Dane są siły działające. Zbadać ruch.
Ruch p.m. może być:
- swobodny, tj. odbywa się pod działaniem siły, i nie podlega oddziaływaniu więzów,
- nieswobodny, tj. taki, na ruch którego nałożono więzy.
Przykłady ruchu swobodnego:rzut pionowy, rzut poziomy, rzut ukośny.
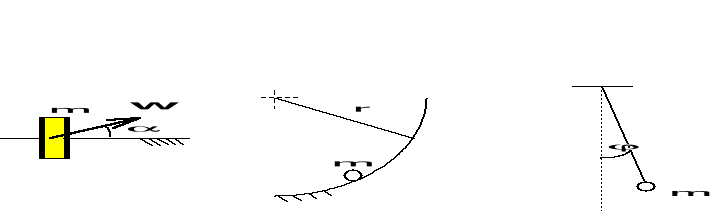
Przykłady ruchu nieswobodnego:
a) pierścień o masie m poruszający się wzdłuż prostego pręta pod działaniem siły nachylonej pod kątem do pręta,
b) p.m. poruszajacy się w niecce o promieniu r,
c) wahadło matematyczne
BADANIE ZAGADNIEŃ W RUCHU PROSTOLINIOWYM PUNKTU SWOBODNEGO
Punkt materialny o masie m porusza się po linii prostej pod działaniem siły P
Równanie dynamiczne ruchu ma postać (II prawo Newtona):
ma = mx = P(t,xx),
gdzie siła P zależy w ogólności od czasu t, położenia x, oraz prędkości x.
Równanie ruchu jest równaniem różniczkowym zwyczajnym, którego rozwiązanie ogólne ma postać:
x = x(t,C1,C2),
gdzie C1 i C2 są stałymi całkowania wyznaczanymi z warunków początkowych (dla t = 0, x = xo , x = vo).
PRZYKŁADY
Przykład gdy na p.m. działa stała siła.
Spadek swobodny punktu z pominięciem oporu powietrza.
Wygodniej jest zapisać równanie:
mdv/dt = mg
Po dwukrotnym scałkowaniu:
x = h = gt2/2, oraz v2 = 2gh.
Przykład gdy na p.m. działa siła zależna od czasu.
1) Znależć równanie drogi p.m. na który działa siła P = Posinkt (Po, k - dowolne stałe). Warunki początkowe: t = 0, x0 = 0, vo = 0.
Równanie dynamiczne ruchu:
mdv/dt = P0 sinkt
Rozwiązanie równania ruchu (pozostawia się czytelnikowi):
2) Ciało o ciężarze P = 10 kG porusza się pod działaniem siły F = 10(1-t) kG, gdzie t w sekundach. Po ilu sekundach ciało zatrzyma się. Warunki początkowe: t = 0, x0 = 0, v0 = 20 cm/s.
Równanie ruchu:
mdv/dt = 10(1-t) .
Przykład gdy siła jest funkcją prędkości
1) Na p.m. spadający pionowo w dół pod działaniem siły ciężkości działa siła oporu powietrza R = kv, gdzie v jest prędkością spadającego p.m., a k dowolną stałą. Zbadać ruch przyjmując warunki początkowe: dla t = 0, vo = 0, xo = 0.
Równanie ruchu:
mdv/dt = mg - kv
2) Stateczek o wyporności 10T porusza się z prędkością 16 m/s. Opór wody wynosi R = kv . Jaką drogę przebędzie stateczek, zanim prędkość spadnie do 4 m/s. W jakim czasie przebędzie tę drogę. Warunki początkowe: dla t = 0, vo = 16 m/s, xo = 0.
Odp. Droga przebyta w czasie t = 6.4 s: x = 47.1 m.
Przykład gdy siła jest zależna od położenia p.m.
Zbadać ruch tzw. oscylatora harmonicznego (masa połączona ze sprężyną, w której siła jest wprost proporcjonalna do wydłużenia sprężyny)
Równanie ruchu oscylatora harmonicznego:
mx = - kx, lub x + o2 x = 0, gdzie o2 = k/m.
Rozwiązanie:
Poszukuje się rozwiązania w postaci:
x = C1 sinot + C2 cosokt,
gdzie stałe C1 i C2 wyznaczamy z warunków początkowych (t=0, x=xo ,v=vo)
Ponieważ mamy do wyznaczenia dwie stałe, a jeden z warunków początkowych dotyczy prędkości, różniczkujemy równanie ruchu:
x = C1 ocost - C2 osint.
Uwzgledniając warunki początkowe otrzymujemy dwa równania:
xo = 0 + C2 1,
vo = C1 o 1 + 0.
Stąd: C1 = v /o, C2 = x o.
Ostatecznie otrzymujemy następujące rozwiązanie:
x = vo/o sinot + xocosot.
Wielkość o jest nazywana częstością drgań własnych.
BADANIE ZAGADNIEŃ W RUCHU KRZYWOLINIOWYM PUNKTU SWOBODNEGO
Na swobodny punkt materialny działa siła W. Zakładamy, że ruch odbywa się w płaszczyżnie xy.
Równanie dynamiczne ruchu:
ma = W,
lub skalarnie:
mx = Wx, my = Wy .
W ogólnym przypadku W = W(t,r,v), czyli
Wx = Wx (t,x,y,x,y), Wy = Wy (t,x,y,x,y).
Rozwiązanie ogólne:
x = x(t,C1 ,C2, C3 ,C4 ), oraz y = y(t,C1 ,C2 ,C3 ,C4).
Stałe całkowania Ci wyznaczamy z warunków początkowych: t = 0, x = x , y = y , x = v, y = v .
PRZYKŁAD. Rzut ukośny.
Odwołanie do dowolnego podręcznika z Mechaniki Ogólnej
Gdy ruch punktu jest badany w naturalnym układzie współrzędnych:
Równania różniczkowe ruchu mają postać:
m a = W , m an = Wn (patrz kinematyka p.m.)
PRZYKŁAD. Wahadło matematyczne
Wahadło matematyczne jest to p.m. zawieszony na cienkiej, doskonale wiotkiej i nierozciągliwej nici. Wahadło wychylamy od pionu, a następnie oswobodzamy.
Kąt określa położenie wahadła
Równanie ruchu:
ma = - mgsin, a = l = l,
Po przekształceniu równania ruchu:
+ g/l sin = 0.
Dla małych , sin .
Ostatecznie:
+ o2 = 0, gdzie: o2 = g/l.
Wahadło matematyczne jest oscylatorem harmonicznym (Patrz przykład wyżej).
Czas jednego wahnięcia (okres drgań):
oT = 2.
Stąd:
T = 2/o = 2 (l/g).
B. Wilczyński Mechanika ogólna
![]()
17
Wyszukiwarka
Podobne podstrony:
Mechanika techniczna(12)
Mechanika Semest I pytania egz
wykl 8 Mechanizmy
mechanizm mycia i prania
MECHANIKA II DYN
METODY KOMPUTEROWE W MECHANICE 2
08 BIOCHEMIA mechanizmy adaptac mikroor ANG 2id 7389 ppt
Mechanizm obrzęków
Mechanizmy swoistej immunoterapii alergii 3
mechanika kwantowa
Mechanizmy nadwrażliwości
Mechanika górotworu cz 3
Szkol Uszkodzenie ciała przez czynniki mechaniczne
więcej podobnych podstron