1.Ruch krzywoliniowy
Równanie toru:
![]()
![]()

![]()
parametryczna postać równania toru
Rozważmy dwa blisko siebie leżące punkty P1 i P2 na torze ruch ciała i oznaczmy wektor prędkości ciała w tych punktach przez v1 i v2. Wektory są styczne do toru. Przyrost Δv
ΔV=V2-V1
Utworzy wektor ![]()
Δt - odstęp czasu w jakim ciało przesunęło się z P1 do P2. Gdy będziemy zmniejszać Δt (zbierać P1 do P2) to wektor ![]()
będzie w granicy dążył do wektora przyśpieszenia w P1 czyli ![]()
wektor przyśpieszenia jest pochodną wektora prędkości , albo drugą pochodną wektora wodzącego względem czasu.
Współrzędne wektora przyśpieszenia :

2.Moment Pedu
![]()
- moment pędu , ![]()
- pęd
![]()
- moment siły ![]()
![]()
Jeżeli ![]()
to ![]()
Moment pędu jest stały gdy nie działa zewnętrzny moment sily.
3.Energia kinetyczna na granicy relaltywistycznej
![]()
![]()
- wielkości charakterystyczne w układzie spoczynkowym
W układzie zewnętrznym -

W układzie spoczynkowym 
![]()
![]()
- energia spoczynkowa
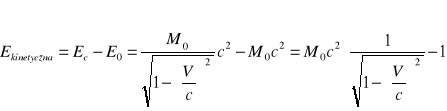
- dla prędkości ![]()
![]()
![]()
![]()
4.Rezonas , wymuszajace
Drgania wymuszone powstają w wyniku działania siły zewnętrznej, drgania wymuszone mają taką częstość z jaką działa siła zewnętrzna a nie taką jaka jest częstość własna ciała. Jednak reakcja ciała zależy od stosunku jaki zachodzi pomiędzy częstością wymuszoną a częstością własną. Kolejne impulsy nawet nie wielkie ale następujące w odpowiednich chwilach mogą doprowadzić do drgań o dużej amplitudzie.
![]()
![]()
Wykres przedstawiający rezonansowy wzrost amplitudy drgań w funkcji częstości siły wymuszającej pokazany jest na rysunku poniżej dla różnych wartości współczynnika tłumienia (0<1<2<3<4).
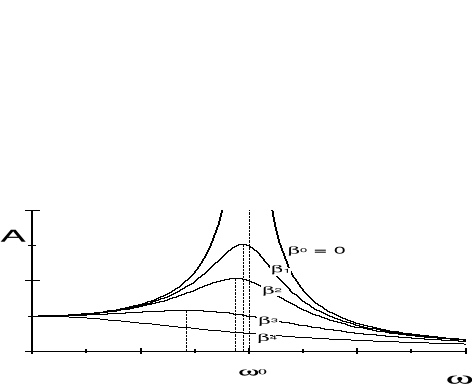
Częstość rezonansowa:
![]()
Amplituda rezonansowa:
5.Predkosc graniczna fali
Fale stojące
S1 i S2 - biegnące w przeciwnym kierunku.
Fale stojące są skutkiem interferencji fal biegnących w przeciwnych kierunkac 
![]()
- równanie fali stojącej

Wyszukiwarka
Podobne podstrony:
Fizyka zestaw VII id 177324 Nieznany
Fizyka - Zestaw zadan, od kogos z wilisia
zestawy zadań przed egzaminem, fizyka - zestawy, przed egzaminem
Zadania - ćwiczenia, Fizyka - zestaw zadań, Fizyka
zestaw5.fizyka, Zestaw AA
Fizyka Zestaw nr 1
Fizyka, zestaw 3, 1
Fizyka zestaw VI id 177323 Nieznany
Fizyka - zestaw zadań, Liceum
ZESTAW 2 G, Studia, Mibm, semestr II, Fizyka Ciała Stałego, Fizyka, Zestawy
GGiOS[6] 2012Z, fizyka paja,lukasz,janusz, Fizyka Zestawy
Fizyka - Pytania - Wieczorowi, SGGW - Technologia żywnosci, II semestr, SEMESTR 2, wyklady II rok,
GGiOS[7] 2013Z, fizyka paja,lukasz,janusz, Fizyka Zestawy
Fizyka zestaw V id 177322 Nieznany
ZESTAW 1 G, Studia, Mibm, semestr II, Fizyka Ciała Stałego, Fizyka, Zestawy
GGiOS[5] 2013Z, fizyka paja,lukasz,janusz, Fizyka Zestawy
GGiOS[3] 2012Z, fizyka paja,lukasz,janusz, Fizyka Zestawy
więcej podobnych podstron