POLITECHNIKA LUBELSKA |
LABORATORIUM PODSTAW AUTOMATYKI |
||||||
Imię i nazwisko: Grzegorz Grochowski Baran Adam Cieszko Radomir Drzazga Jarosław |
Grupa: ED. 6.1 |
Rok akadem. : 1996/97 |
|||||
Data: 21.05.97 |
Nr ćwiczenia: 9 |
Ocena:
|
Temat: Analiza nieliniowego układu automatycznej regulacji - dwupołożeniowa regulacja temperatury |
||||
Cel ćwiczenia:
Celem ćwiczenia jest poznanie właściwości nieliniowych układów regulacji automatycznej na przykładzie dwupołożeniowej regulacji temperatury.
Wprowadzenie.
Zadaniem układu regulacji temperatury jest utrzymanie zadanej temperatury obiektu cieplnego w warunkach ciągle zmieniających się zakłóceń. W przypadku np. pieca elektrycznego dokonuje się to przez włączenie i wyłączenie mocy grzejnej, stąd często stosuje się do regulacji temperatury regulatory dwupołożeniowe.
Przykładowy schemat blokowy prostego układu regulacji wupołożeniowej
Cieplny obiekt regulacji w przybliżeniu uważać można za obiekt liniowy, którego odpowiedź na skok jednostkowy ma charakter inercyjny z czasem opóźnienia. (Wykres 1)
Obiekt regulacji może być opisany transmitancją operatorową postaci:
To-czas opóźnienia (czas martwy, opóźnienie transportowe) wynikający ze skończonego czasu transportu ciepła od elementów grzejnych do punktu pomiarowego.
Tob- zastępcza stała czasowa obiektu (uwzględnia stałe czasowe poszczególnych elementów obiektu takich jak: elementy grzejne, izolacja cieplna, wsad itp.)
kpb - współczynnik wzmocnienia obiektu.
Stała czasowa zależy od pojemności cieplnej komory grzejnej obiektu oraz powierzchni oddawania ciepła. Współczynnik wzmocnienia determinuje maksymalną temperaturę możliwą do osiągnięcia w obiekcie i jest zależny od mocy grzejnej i od strat ciepła.
Wykonanie ćwiczenia.
1. Identyfikacja obiektu cieplnego.
W celu określenia transmitancji obiektu przeprowadziliśmy eksperyment polegający na pomiarze zmian temperatury w czasie po skokowym włączeniu mocy grzejnej. Otrzymaliśmy następujące wyniki . Tabela 1. i Wykres1.
t |
T |
min |
oC |
0.5 |
25 |
1 |
27 |
2 |
31 |
3 |
42 |
4 |
56 |
5 |
75 |
6 |
92 |
7 |
111 |
8 |
130 |
9 |
146 |
10 |
160 |
11 |
174 |
12 |
186 |
13 |
197 |
To ≈ 2 min
Tob ≈10 min
Badanie układów regulacji temperatury.
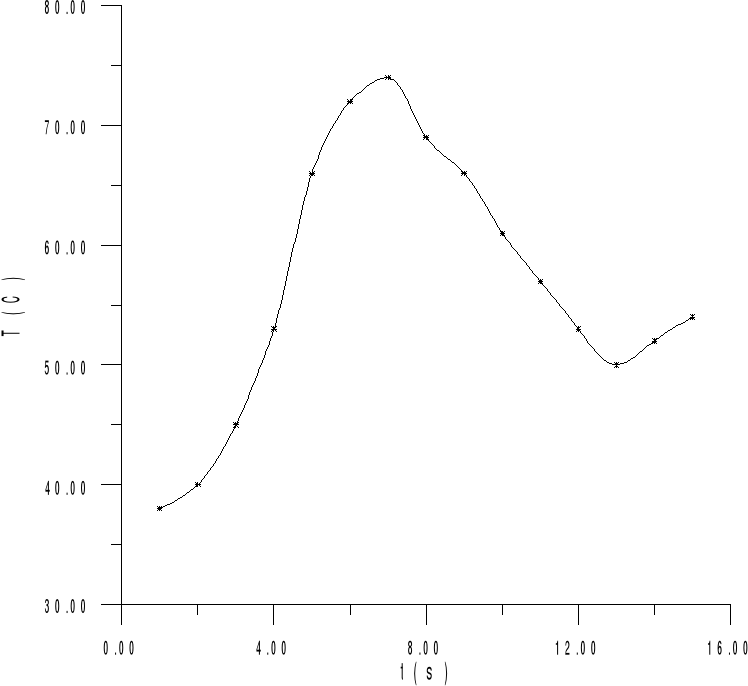
W czasie ćwiczenia zarejestrowaliśmy przebieg zmian temperatury w układzie z termometrem kontaktowym oraz regulatorem RE dal różnych wartości temperatury. W celu przyspieszenia wykonywania pomiarów badania przeprowadziliśmy dla obiektu z wentylatorem i jednoczesnym otwarciu drzwiczek
Układ z termometrem kontaktowym
t |
T |
min |
oC |
1 |
38 |
2 |
40 |
3 |
45 |
4 |
53 |
5 |
66 |
6 |
72 |
7 |
74 |
8 |
69 |
9 |
66 |
10 |
61 |
11 |
57 |
12 |
53 |
13 |
50 |
14 |
52 |
15 |
54 |
Dla t = 4 min nastąpiło włączenie się wiatraczka - wyłączenie grzałki.
Dla t = 13 min nastąpiło wyłączenie się wiatraczka - włączenie grzałki.
Dla t = 15 min nastąpiło włączenie się wiatraczka - wyłączenie grzałki.
Tust = 60 oC , DT = 12 oC
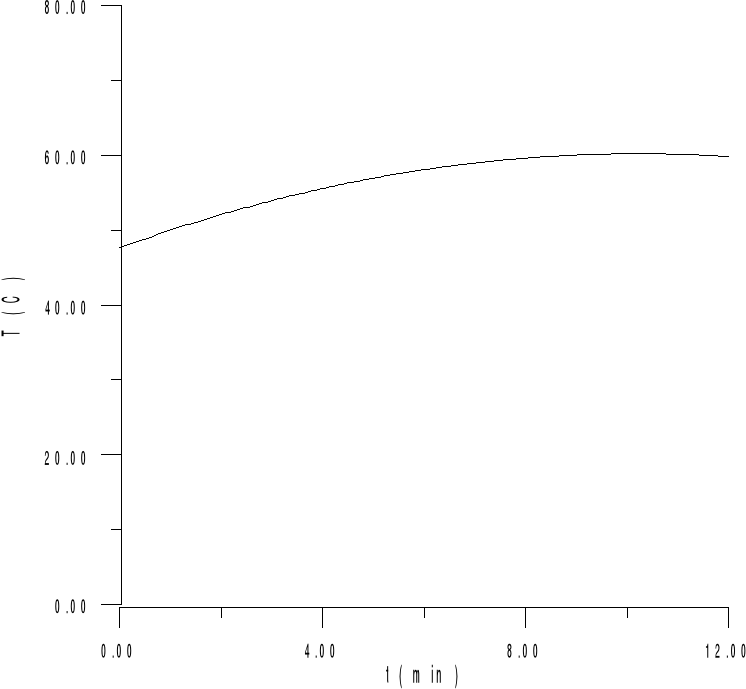
Układ z regulatorem elektronicznym RE - 7.
t |
T |
min |
oC |
0 |
50 |
1 |
48 |
2 |
49 |
3 |
54 |
4 |
58 |
5 |
58 |
6 |
59 |
7 |
58 |
8 |
59 |
9 |
59 |
10 |
61 |
11 |
60 |
12 |
60 |
Dla t = 6 min nastąpiło wyłączenie się wiatraczka - włączenie grzałki
Dla t = 13 min nastąpiło włączenie się wiatraczka - wyłączenie grzałki
Tust = 60 oC
DT = 5 oC
1.Na podstawie otrzymanych wykresów można stwierdzić układ z termometrem kontaktowym charakteryzował się gorszymi parametrami niż układ z regulatorem elektronicznym RE - 7. Układ pierwszy miał większą amplitudę oscylacji w porównaniu z drugim. Charakteryzował się też większym opóźnieniem czasowym po wyłączeniu grzałki i włączeniu wiatraczka oraz otwarciu drzwiczek. Układ pierwszy miał większą częstotliwość oscylacji temperatury.
2.Dokładniejsze określenie parametrów było niemożliwe, z powodu zbyt krótkiego czasu pomiaru w porównaniu z czasami grzania i chłodzenia . Nie można było zaobserwować pełnego okresu oscylacji temperatury i określenia czasów oraz wartości średniej.