POLITECHNIKA ŚLĄSKA W GLIWICACH
Wydział: MECHANICZNY - TECHNOLOGICZNY
Kierunek: AUTOMATYKA I ROBOTYKA
Grupa: V
sekcja: 2
LABORATORIUM Z MECHANIKI OGÓLNEJ
Macierzowa analiza sił w prętach kratownicy płaskiej
Opracował:
MARIUSZ FORNAL
CZĘŚĆ TEORETYCZNA
Celem ćwiczenia jest zapoznanie się z zastosowaniem rachunku macierzowego do określania sił w prętach płaskiej kratownicy statycznie wyznaczalnej.
Kratownice statycznie wyznaczalną nazywamy tak wtedy gdy liczba niewiadomych sił w prętach oraz reakcji podporowych jest równa liczbie równań równowagi. Rozważania do kratownic płaskich spełniających założenia technicznej kratownic, tzn. odpowiednio podpartych (statycznie zewnętrznie wyznaczalnych) geometrycznie niezmiennych zbudowanych z prętów przegubowych i obciążonych w węzłach. W takim przypadku siły w prętach tworzy w każdym z węzłów kratownicy zbieżny układ sił. Dla kratownicy posiadającej m węzłów oraz n prętów możemy napisać 2m równań odpowiadających rzutom sił na osie układu współrzędnych:
a11xS1 +a12xS2+ a13xS3 +... anxSn + Pix = 0
a11yS1 +a12yS2+ a13yS3 + ... anySn + Piy = 0
I = 1 …, m, j = 1 …, n,
ai1xS1 +ai2xS2+ ai3xS3 + ... ainxSn + Pix = 0
ai1yS1 +ai2yS2+ ai3yS3 + ... ainxSn + Piy = 0
gdzie:
S - siła wewnętrzna w pręcie o numerze j = 1 …, n,
aijx, aijy - współczynniki w równaniu równowagi dla węzła i = 0 … m odpowiednio z rzutowanym na osie x i y układu współrzędnych stojące przy sile o numerze j
Pix, Piy - rzuty sił zewnętrznych (uwzględniając reakcje więzów) na osie x i y układu współrzędnych przyłożonych w węźle i.
Współczynniki aijx, aijy - mogą być równe zero lub być różne od zera w zależności od tego, czy dany pręt występuje w rozpatrywanym węźle, czy też nie występuje. Układ równań równowagi możemy zapisać zatem w postaci macierzowej:
P = - A⋅S
gdzie:
P - macierz kolumnowa składowych sił zewnętrznych przyłożonych w węzłach zawierające niewiadome podporowe
A - macierz współczynników równań równowagi węzłów
S - macierz kolumnowa sił wewnętrznych
Istota macierzowej metody wyznaczania sił w prętach kratownicy polega więc na automatycznym generowaniu równań równowagi wszystkich węzłów kratownic I zapisaniu ich w postaci macierzowej. Równania te umożliwiają wyznaczanie sił we wszystkich n prętach oraz wyznaczanie 3 niewiadomych reakcji podporowych. Kluczem do tej metody jest macierz A, której struktura zależy od postaci konstrukcyjnej analizowanej kratownicy.
Budowa macierzy połączeń
Macierz połączeń zawiera konfigurację kratownicy, tzn. Zapisana w niej informacja o połączeniach prętów w poszczególnych węzłach. Obliczenia rozpoczynamy od ponumerowania w dowolnej kolejności węzłów I prętów w kratownicy. Przyjmujemy, że początkiem pręta jest węzeł o niższym numerze. Następnie budujemy macierz połączeń:
K =![]()
i = 1 …, m j = 1 …, n
gdzie:
n - liczba węzłów
m - liczby prętów
i - numer węzła
j - numer pręta
Wiersze macierzy A odpowiadają węzłom, a kolumny prętom. W każdej kolumnie znajdują się tylko dwa niezerowe elementy:
„1” - w wierszu o numerze równym numerowi węzła, który jest początkiem pręta
„1” - wierszu odpowiadającym końcowi pręta
Budowa macierzy współrzędnych węzłów
Odbieramy dowolny prostokąt układ współrzędnych. Dla uproszczenia zapisu osie układu oznaczamy jako 1 i 2 w miejsce x i y. Macierz współrzędnych węzłów ma następującą postać:
X = ![]()
; i = 1..., m; j = 1..., n
Wiersze macierzy odpowiadają poszczególnym węzłom kratownicy, natomiast kolumny współrzędnym węzłów względem osi 1 i 2.
Budowa macierz cosinusów kierunkowych
W macierzy tej zapisane są cosinusy kierunkowe poszczególnych prętów kratownicy, a co za tym idzie, poszczególnych sił wewnętrznych. Zbudowanie tej macierzy wymaga określenia składowych długości prętów w przyjętym układzie współrzędnych oraz wyznaczenie ich całkowitej długości. Na tej podstawie możemy określić dopiero cosinusy nachylenia poszczególnych prętów kratownicy do osi układu współrzędnych. Macierz składowych długości prętów:
D![]()
i = 1, 2 j = 1, 2 ... m
Obliczamy z równania:
D = - KTX
Długości prętów są równe:
a, ich cosinusy kierunkowe:
cij = cosαij = ![]()
Macierz cosinusów kierunkowych C ma następującą postać:
![]()
Wiersze macierzy odpowiadają odpowiednim prętom kratownicy, natomiast kolumny cosinusów kątów nachylenia prętów do osi 1 i 2 układu współrzędnych.
Budowa macierzy sił zewnętrznych
Zakładamy, że w węzłach kratownicy przyłożone są siły zewnętrzne, których składowe są elementami macierzy F.
Między macierzami sił zewnętrznych P i wewnętrznych S zachodzi związek a równowagi węzłów:
P = -A⋅S
Budowa macierzy współczynników równań równowagi węzłów
Macierz A powstaje z macierzy K przez podstawienie w miejsce elementów:
„1” - odpowiednich wierszy macierzy cosinusów kierunkowych z macierzy C, odpowiadających poszczególnym prętom kratownicy
„-1” - jw., ale ze znakiem przeciwnym
„0” - dwuelementowego wektora zerowego
Wyznaczanie sił wewnętrznych wymaga wyeliminowania z macierzy A wierszy, a z macierzy kolumnowej P elementów odpowiadających warunkom podparcia. Po rozwiązaniu takiego uproszczonego układu równań wyznaczamy siły wewnętrzne w prętach kratownicy. Wartość dodania siły oznacza, że pręt jest rozciągany, a ujemna, że ściskany. Znając wartość tych sił i korzystając z odrzuconych równań zawierających składowe reakcji możemy wyznaczyć reakcje w podporach.
CZĘŚĆ PRAKTYCZNA
Ćwiczenie rozpoczynamy od narysowania schematu kratownicy płaskiej, ustalenia numeracji węzłów i prętów, miejsc podparcia przez podporę stałą i przesuwną.
Warunek statycznej wyznaczalności kratownicy:
p = 2w - 3
11 = 11
Kratownicy jest statycznie wyznaczalna
Budowa macierzy połączeń:
K=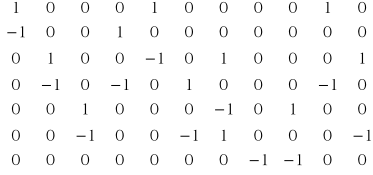
Budowa macierzy współrzędnych węzłów:
X = 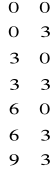
Po wprowadzeniu do komputera wszystkich danych otrzymaliśmy następujące wyniki:
D = 
Wektor długości prętów:
L = [3; 3; 3; 3; 3; 3; 3; 3;
4.2426; 4.2426; 4.2426]
Macierz cosinusów w prętach:
C =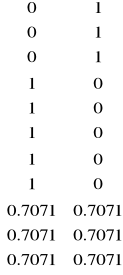
Siły występujące w prętach:
s1 = 0
s2 = -3.333
s3 = -3.333
s4 = 0
s5 = 6.667
s6 = -6.667
s7 = 3.333
s8 = 3.333
s9 = 4.714
s10 = -9.428
s11 = 4.714
Jak zostało wspomniane wcześniej ujemne wartości sił oznaczają, że dany pręt jest ściskany.
Reakcje w podporach - podpora stała:
Rax = 0.00
Ray = 3.333
RA = 3.333
podpora przesuwna:
RB = -6.667
Kąt pomiędzy RB i osią αOY = 0
WNIOSKI:
Kratownice znajdują wielkie zastosowanie w wielu konstrukcjach ze względu na swą lekkość i prostotę wykonania.
Skorzystanie z programu komputerowego umożliwia bardzo dokładne obliczenie takich wartości jak:
- sił działający w prętach kratownicy
- sił w podporach, z dokładnym odwzorowaniem graficznym
- długości prętów
2
Wyszukiwarka
Podobne podstrony:
Biochemia - kolokwium[1], Studia, Semestr III, Biochemia, Wykłady
Elektrotechnika.02.01, Studia, I semestr, Elektrotechnika, Elektra wykłady
Elektrotechnika.11.01, Studia, I semestr, Elektrotechnika, Elektra wykłady
Elektrotechnika.05.01, Studia, I semestr, Elektrotechnika, Elektra wykłady
Elektrotechnika.04.01, Studia, I semestr, Elektrotechnika, Elektra wykłady
Elektrotechnika.09.01, Studia, I semestr, Elektrotechnika, Elektra wykłady
Elektrotechnika.13.02, Studia, I semestr, Elektrotechnika, Elektra wykłady
oznaczenia, studia, V semestr, Automatyka i robotyka, wykłady
Teoria liczb przyklady, studia, 6 semestr, Teoria liczb, wyklady cwiczenia
SKUTECZNA WENTYLACJA KANALIZACJI 2003, Architektura i Urbanistyka, Studia, Semestr V, Instalacje bud
elektrotechnika.07.01, Studia, I semestr, Elektrotechnika, Elektra wykłady
m010p, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
m014a, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
m002b, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
ZASADA ZACHOWANIA PĘDU, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
zadania mechanika 11.06.2004, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
m011p, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
Moment siły względem punktu, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
więcej podobnych podstron