Opracowanie wyników
|
Sprężyna 1 |
Sprężyna 2 |
l0 |
15,5 cm |
17 cm |
M |
35,4 g |
88 g |
d |
0,94 mm |
1,12 mm |
D |
11,4 mm |
30 mm |
n |
158 |
126 |
l0 - długość sprężyny bez obciążenia
M - masa sprężyny
d - średnica drutu
D - średnica zwoju
n - liczba zwojów
Ad.1 Metoda Statyczna
Sprężyna 1
g = 9,81 [m/s2]
obciazenie [kg] |
wychylenie [m] |
f=M*g [N] |
0 |
0 |
0 |
0,0806 |
0,036 |
0,790686 |
0,0906 |
0,041 |
0,888786 |
0,108 |
0,045 |
1,05948 |
0,117 |
0,048 |
1,14777 |
0,1688 |
0,066 |
1,655928 |
0,232 |
0,092 |
2,27592 |
0,2838 |
0,11 |
2,784078 |
0,3486 |
0,133 |
3,419766 |
0,4006 |
0,151 |
3,929886 |
0,4636 |
0,175 |
4,547916 |
0,5154 |
0,193 |
5,056074 |
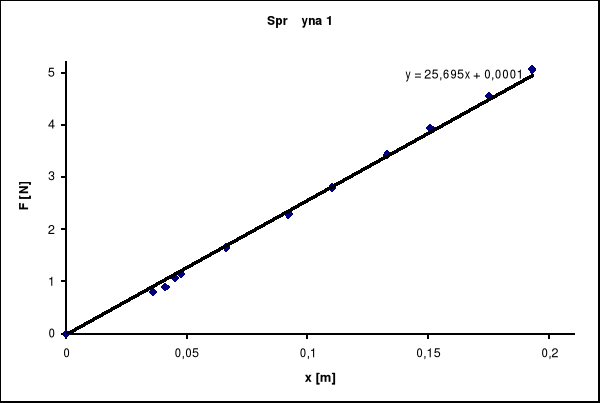
Wyznaczony metodą regresji liniowej współczynnik sprężystości jest równy współczynnikowi kierunkowemu prostej i wynosi k1= 25,695 [kg/s2]
Niepewność wyznaczenia współczynnika k dla sprężyny 1 wynosi σ1= 0,268539
Sprężyna 2
obciazenie [kg] |
wychylenie [m] |
f=M*g [N] |
0 |
0 |
0 |
0,0806 |
0,156 |
0,790686 |
0,0906 |
0,175 |
0,888786 |
0,108 |
0,215 |
1,05948 |
0,117 |
0,234 |
1,14777 |
0,1616 |
0,328 |
1,585296 |
0,1688 |
0,341 |
1,655928 |
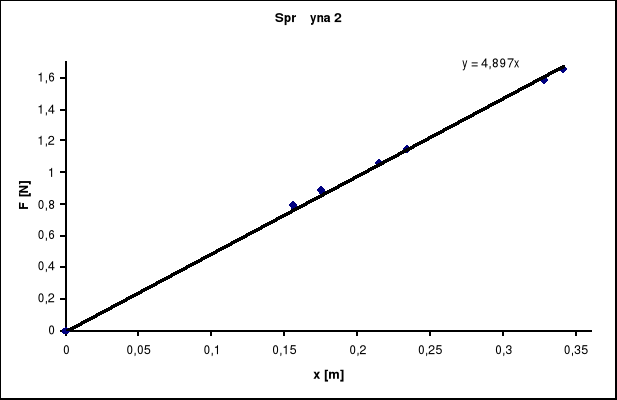
k2 = 4,897 [kg/s2] σ2= 0,06526
Ad.2 Metoda Dynamiczna
Sprężyna 1
obciazenie [kg] |
czas 20 okresow [s] |
sredni czas 1 okresu [s] |
T^2 [s^2] |
0,0806 |
7,35 |
0,3675 |
0,135056 |
0,1172 |
8,63 |
0,4315 |
0,186192 |
0,1692 |
10,13 |
0,5065 |
0,256542 |
0,2332 |
11,9 |
0,595 |
0,354025 |
0,2852 |
13,09 |
0,6545 |
0,42837 |
0,3488 |
14,44 |
0,722 |
0,521284 |
0,4008 |
15,35 |
0,7675 |
0,589056 |
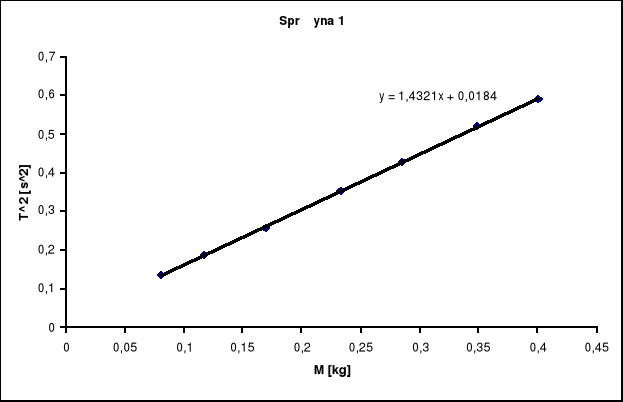
Współczynnik kierunkowy uzyskany z regresji liniowej wynosi a = 1,4321
Obliczam współczynnik sprężystości z zależności ![]()
Stąd k1 = 27,5388 [kg/s2] , a niepewność σ1= 0,01045
Sprężyna 2
obciazenie [kg] |
czas 20 okresow [s] |
sredni czas 1 okresu [s] |
T^2 [s^2] |
0,0806 |
19,19 |
0,9595 |
0,92064 |
0,0906 |
20,4 |
1,02 |
1,0404 |
0,108 |
21,25 |
1,0625 |
1,128906 |
0,1172 |
22,25 |
1,1125 |
1,237656 |
0,1616 |
25,4 |
1,27 |
1,6129 |
0,1692 |
25,56 |
1,278 |
1,633284 |
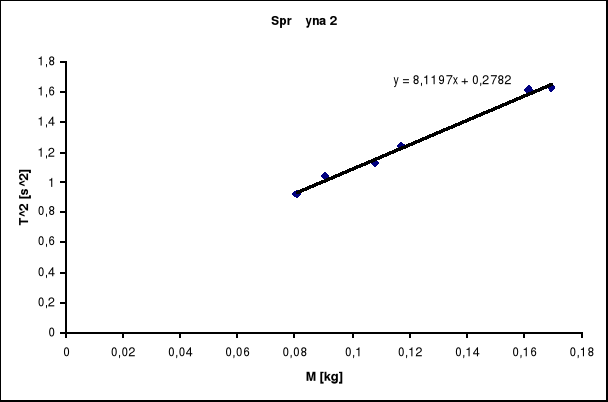
Współczynnik kierunkowy uzyskany z regresji liniowej wynosi a = 8,1197
Obliczam współczynnik sprężystości podobnie jak dla sprężyny 1:
Stąd k2 = 4,8571 [kg/s2] , a niepewność σ2= 0,30267
Porównanie metod
|
Metoda statyczna |
Metoda dynamiczna |
Sprężyna 1 |
k1= 25,695 ± 0,26854 [kg/s2] |
k1 = 27,5388 ± 0,01045 [kg/s2] |
Sprężyna 2 |
k2 = 4,897 ± 0,06526 [kg/s2] |
k2 = 4,8571 ± 0,30267 [kg/s2] |
Jak widać z tabelki - pomiary współczynnika sprężystości obiema metodami są do siebie zbliżone, szczególnie dla sprężyny drugiej. Obie metody można uznać za skuteczne, lecz według mnie bardziej dokładna jest statyczna, ponieważ przy dynamicznej dochodzi nam czasem dość duży błąd związany z pomiarem czasu stoperem. Problemem jest także wprawienie sprężyny w idealnie pionowy ruch oscylacyjny.
Ad. 3 Moduł sztywności
|
Sprężyna 1 |
Sprężyna 2 |
Promień drutu r [m] |
0,00047 |
0,00056 |
Promień zwoju R [m] |
0,0057 |
0,015 |
Liczba zwojów n |
159 |
127 |
Moduł sztywności wyliczam z następującej zależności:
![]()
![]()
G1 = 63561777911 [Pa] G2 = 84029623887 [Pa]
Obliczam błąd wyznaczenia modułu sztywności z prawa przenoszenia błędów:


Sprężyna 1:
Błędy maksymalne:
Współczynnik sprężystości Δk = 0,3
Promień zwoju ΔR = 0,0002
Promień drutu Δr = 0,00002
ΔG1 = 12501442815 [Pa]
Sprężyna 1:
Błędy maksymalne:
Współczynnik sprężystości Δk = 0,1
Promień zwoju ΔR = 0,002
Promień drutu Δr = 0,00002
ΔG2 = 9274184032 [Pa]
Wyszukiwarka
Podobne podstrony:
cw 2 - opracowanie, agh wimir, fizyka, Fizyka(1)
ćw 12 opracowanie, agh wimir, fizyka, Fizyka(1)
cw 13 - opracowanie, agh wimir, fizyka, Fizyka(1)
cw 13, agh wimir, fizyka, Fizyka(1)
5 opracowanie, agh wimir, fizyka, Fizyka(1)
1 opracowanie, agh wimir, fizyka, Fizyka(1)
ćw 11, agh wimir, fizyka, Fizyka(1)
7 opracowanie, agh wimir, fizyka, Fizyka(1)
6 opracowanie, agh wimir, fizyka, Fizyka(1)
Opracowanie 10, agh wimir, fizyka, Fizyka(1)
Opracowanie Cw6, agh wimir, fizyka, Fizyka(1)
Opracowanie Cw4, agh wimir, fizyka, Fizyka(1)
Opracowanie Cw5, agh wimir, fizyka, Fizyka(1)
labolatorium2, agh wimir, fizyka, Fizyka(1)
10 moj konspekt, agh wimir, fizyka, Fizyka(1)
konspekt(1), agh wimir, fizyka, Fizyka(1)
samoindukcja cewki, agh wimir, fizyka, Fizyka(1)
więcej podobnych podstron