Prędkość kątowa ciała sztywnego w przestrzeni i w ciele.
![]()
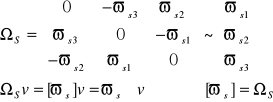
- macierzowa prędkość kątowa w przestrzeni
![]()
- skośnie symetryczna
![]()
![]()
- macierzowa prędkość kątowa w ciele
![]()
- skośnie symetryczna
![]()
![]()
związek między prędkościami.
![]()
Elipsoida manipulowalności.
- strefa przestrzeni przegubowych
![]()
![]()
![]()
- elipsoida manipulowalnosci
Transformacja prędkości z przegubów do efektora jest opisana przez elipsoide manipulowalnosci.
W konfiguracji osobliwej q, ![]()
zatem E(q) spłaszcza się (objętość E(q)=0). Skoro w q - osobliwym vol E(q)=0 to vol E(q) można traktować jako miare jakości konfiguracji.
![]()
Zadanie śledzenia: metoda obliczonego momentu.
- kompensacja nieliniowości ![]()
![]()
-śledzenie w układzie liniowym
![]()
- błąd regulacji
![]()
![]()
![]()
![]()
Re![]()
< 0 , wystarczy by ![]()
>0
Algorytm obliczania momentu:

Ograniczenia holonomiczne i nieholonomiczne.
![]()
są holonomiczne (całkowalne), jeżeli ![]()
nieosobliwa
![]()
![]()
Jeśli ![]()
to ograniczenia ![]()
są nieholonomiczne
Gdzie: ![]()
, a ![]()
oznacza dystrybucje układu
Mała flaga układu, wektor wzrostu i stopień nieholonomiczności.
Dla układu 
tworzymy zestaw obiektów geometrycznych zwanych dystrybucjami : ![]()
![]()
![]()
Ciąg ![]()
nazywamy mała flagą dystrybucji związanych z naszym układem.
Ciąg liczb ![]()
nazywamy wektorem wzrostu flagi w punkcie q, a liczbę p nazywamy stopniem nieholonomiczności układu.
- 1 -
Wyszukiwarka
Podobne podstrony:
tchoń, W4 - elektroniki
tchoń, W4 - elektroniki
tchoń, W4 - elektroniki
krzysztofik, W4 - elektroniki
3858, W4 - elektroniki
polak, W4 - elektroniki
krzysztofik, W4 - elektroniki
polak, W4 - elektroniki
1643, W4 - elektroniki
3334, W4 - elektroniki
1663, W4 - elektroniki
pomianek, W4 - elektroniki
zamojski, W4 - elektroniki
radosz, W4 - elektroniki
późniak-koszałka, W4 - elektroniki
7807, W4 - elektroniki
galar, W4 - elektroniki
piasecki, W4 - elektroniki
więcej podobnych podstron