2 .Przebieg ćwiczenia
Zapoznaliśmy się ze schematem modelu układu przedstawionego na płycie czołowej stanowiska laboratoryjnego .
2.3 Zbadaliśmy prosty układ regulacji , którego schemat jest podany poniżej
k1=k2=1 ; T=1
l. Obliczenie transmitancji wypadkowej .
transmitancja dwóch elementów połączonych szeregowo:
transmitancja wypadkowa po uwzględnieniu sprzężenia zwrotnego i wartości podstawień:
T=1 , k1=l , k2=l:
po uwzględnieniu definicji transmitancji tj.
transmitancja wypadkowa wyraża się następująco :
na podstawie powyższego wzoru można utworzyć równania stanu i wyjścia obiektu dynamicznego .
2. Wyprowadzenie równań obiektu dynamicznego i macierzy
Wymnażając stronami równanie przedstawione powyżej otrzymujemy:
a po przejściu do dziedziny czasu otrzymujemy:
Otrzymane równanie jest równaniem różniczkowym II rzędu, zatem można utworzyć dwa równania różniczkowe I rzędu, które odpowiadać będą dwóm równaniom stanu o postaci normalnej. Jako zmienną stanu obieramy sygnał wyjściowy y(t) a wtedy, zgodnie z zasadami doboru zmiennych fazowych, można utworzyć relacje:
Zatem równania obiektu dynamicznego są następujące:
Otrzymujemy dwa równania stanu i jedno równanie wyjścia

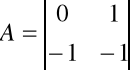
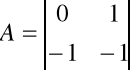
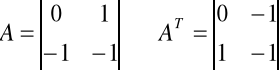
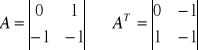
Macierze odnoszące się do powyższego układu równań są następujące :
![]()

Zamodelowanie działania tego układu przeprowadziliśmy na naszym stanowisku .
Zarejestrowaną charakterystykę skokową układu przedstawiona jest na wykresie dołączonym do sprawozdania .
Sprawdzanie warunków sterowalności , obserwowalności , i stabilności układu .
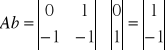
1) Warunek sterowalności układu :
Warunkiem koniecznym i dostatecznym sterowalności jest aby macierz
była rzędu n (czyli ,żeby miała n - liniowo niezależnych kolumn, wyznacznik takiej macierzy jest rożny od zera).
Układ, którego sterowalność będziemy sprawdzać jest układem o jednym wejściu
czyli równanie stanu ma postać:
, a macierz S nie może być osobliwa.
Układ z jednym wejściem jest sterowalny jeśli:
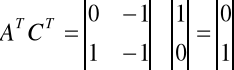
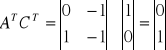
w celu wyznaczenia macierzy S określamy kolejno poszczególne macierze:
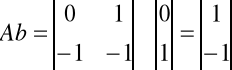

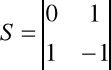

Zatem wyznacznik det S = det = 0 - 1 = -1 ≠ 0
Jak widać w macierzy S występują 2 niezależne liniowo kolumny, a wartość wyznacznika jest -1, czyli wyznacznik jest różny od O, czyli układ jest sterowalny.
2) Warunek obserwowalności układu :
Warunkiem koniecznym i dostatecznym obserwowalności jest aby macierz
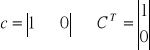
Układ, którego obserwowalność będziemy sprawdzać jest układem o jednym wyjściu
była rzędu n (czyli, żeby miała n - liniowo niezależnych kolumn).
czyli równanie wyjścia ma postać:
czyli warunkiem koniecznym i wystarczającym jest, aby macierz W nie była osobliwa czyli wartość wyznacznika det W ≠ 0.
Obliczenia dot. obserwowałrości:
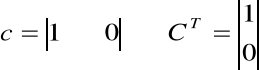
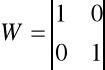
det W = 1*1 - 0 = 1 ≠ 0 czyli układ jest obserwowalny.
Wstęp
Dowolny układ fizyczny rozpatrywany z punktu widzenia zachowania się w czasie , a więc z punktu widzenia zachodzących w nim procesów dynamicznych nazywamy układem dynamicznym . Informacji o zachowaniu się układu w czasie dostarczają przebiegi wielkości fizycznych podlegających pomiarom takich jak : napięcie prąd , ciśnienie , temperatura , położenie , prędkość itd. Nazywamy te wielkości sygnałami , są bowiem nośnikami informacji o stanie układu . Układami liniowymi nazywamy układy dla których związki między sygnałami wejściowymi , wyjściowymi oraz innymi współrzędnymi układu mogą być przedstawione w postaci liniowych równań różniczkowych . Równania układu (równania macierzowe ) mają postać :
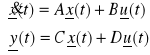
Związek między stanem układu x , a sygnałem wejściowym nosi nazwę równania stanu , zaś związek wyrażający sygnał wyjściowy y przez kombinację liniową stanu układu i sygnału wejściowego - nazywamy równaniem wyjścia .
Układ sterowalny to układ , który stosując ograniczenie , przedziałami ciągłe sterowanie można przeprowadzić z dowolnego zadanego stanu początkowego do początku układu współrzędnych przestrzeni stanu w skończonym czasie .
Układ obserwowalny - pojęcie oznacza to , że przy dowolnie zadanym sterowaniu istnieje skończony przedział czasu , taki że na podstawie znajomości sterowania i odpowiedzi w tym przedziale można wyznaczyć stan początkowy tego układu .

![]()
![]()

![]()




Wyszukiwarka
Podobne podstrony:
Z2, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
Z9, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
ZESTAW 1, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
Przekazniki, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, automaty
156, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolos
Sciaga234, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolo
konop, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolos
Przekazniki1, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, automaty
ZESTAW 6, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
WNIOSKI UZUPEŁNIENIE, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty,
Z6, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
Cwiczenie 1 moje - obiekt dynamiczny linowy, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, A
automaty PID, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, automaty
przekazniki automaty 5 wojto, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Podstawy Automat
234, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolos
Automatyka -moja, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, automaty, automaty, automaty
więcej podobnych podstron