Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie
Teoria maszyn i mechanizmów
Nr projektu:
5A
Tomasz Łata
Rok II, gr. 7A
Wydział IMiR
Założono następujące wymiary mechanizmu, oraz parametry jednego jego położenia.
Przyjęto wymiary mechanizmu oraz ograniczenia warunkujące jego prawidłową prace i działanie. Założono początkowe położenie mechanizmu, oraz prędkości i przyspieszenie członu napędzającego.
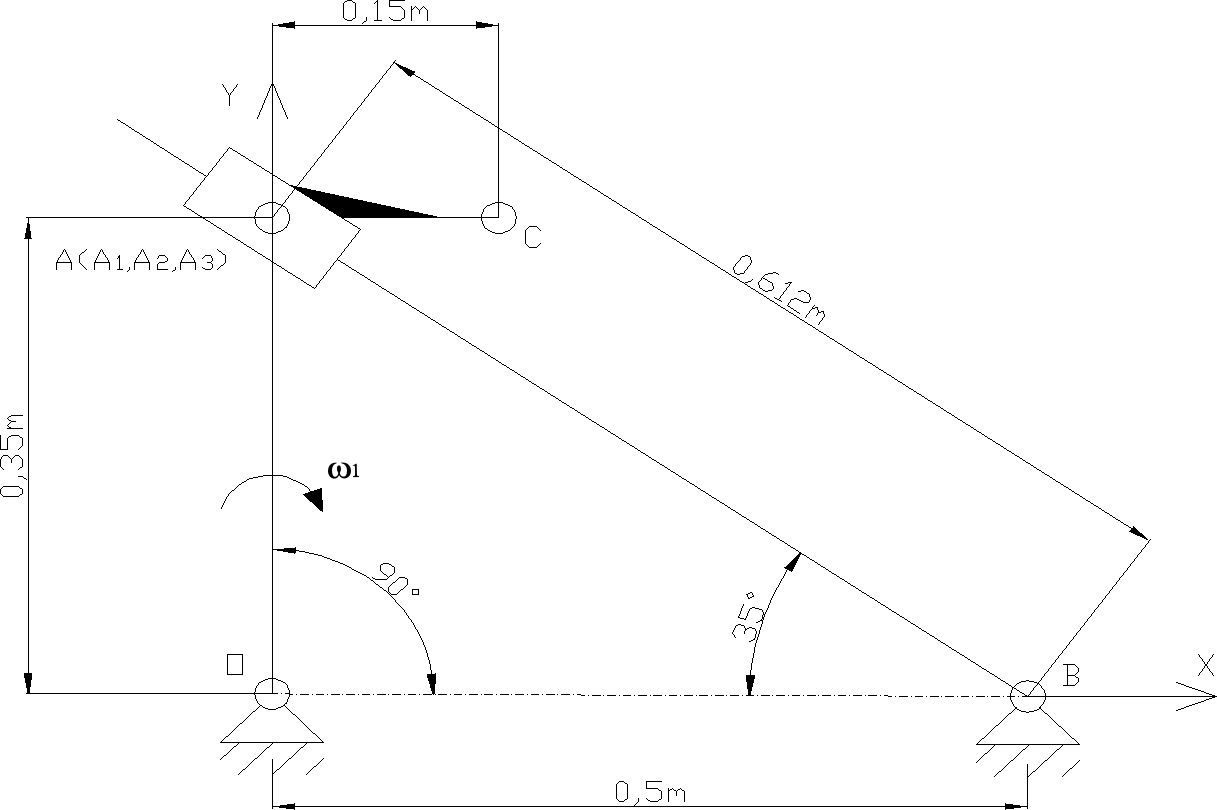
Przyjęto wymiary:
|OA|=0,35[m]
|AB|=0,612[m]
|AC|=0,15[m]
|OB|=0,5[m]
Kąty ustawienia członów dla jednego położenia
φ1=90[°] φ2=145[°]
Przyjęto prędkość i przyspieszenie członu napędzającego:
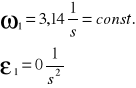
Wyznaczenie ruchliwości mechanizmu, podział na grupy strukturalne oraz klasyfikacja mechanizmu.
Podział na grupy strukturalne.
Podział mechanizmu
Analizowana grupa strukturalna jest klasy II
Ruchliwość mechanizmu wyznaczam ze wzoru:
w=3*n-p4-2p5
w- ruchliwość mechanizmu
n- liczba członów mechanizmu
p4- para kinematyczna klasy czwartej
p5- para kinematyczna klasy piątej
Określenie ruchliwości analizowanego mechanizmu
n= 3
p4=0
p5=4
![]()
Analiza kinematyczna mechanizmu.
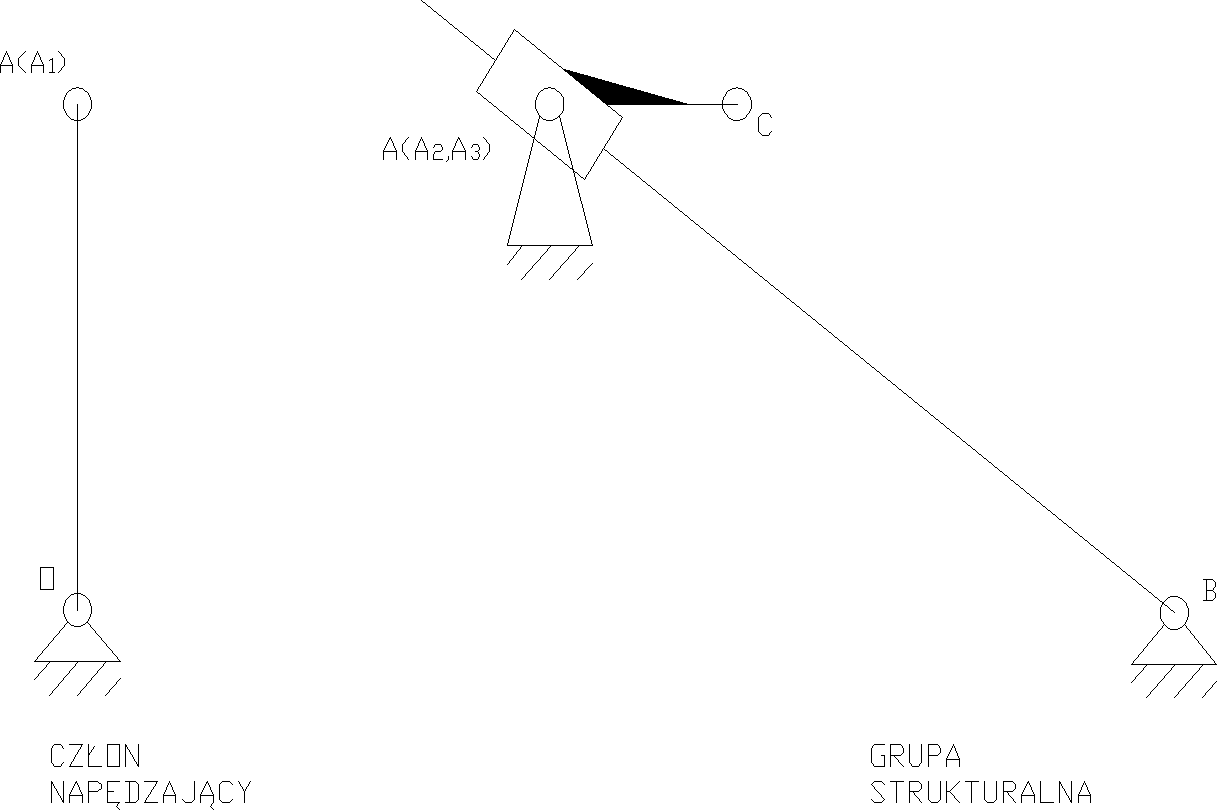
Analiza kinematyczna wykonana jest metodą grafoanalityczną dla przedstawionego położenia mechanizmu. ![]()
Schemat rozkładu prędkości
Grafoanalityczna analiza prędkości mechanizmu
Przyjęto prędkość członu napędzającego
ω1=3,14[1/s]
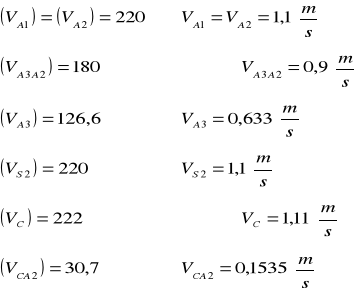
Wyznaczenie prędkości VA1
VA1= ω1·|0A1|=3,14·0,35=1,1 ![]()
Wyznaczenie prędkości VA2
VA1= VA2=1,1 ![]()
Wyznaczenie prędkości VA3
![]()
Wektor prędkości VA2 jest jest prostopadły |0A|
Wektor prędkości V A3A2 jest równoległy |AB|
Wektor prędkości V A3 jest prostopadły |AB|
Wyznaczenie prędkości VC
Wektor prędkości V CA2 jest prostopadły |AC|
Prędkość (m2) środka masy
![]()
Określenie podziałki rysunkowej dla planu prędkości:
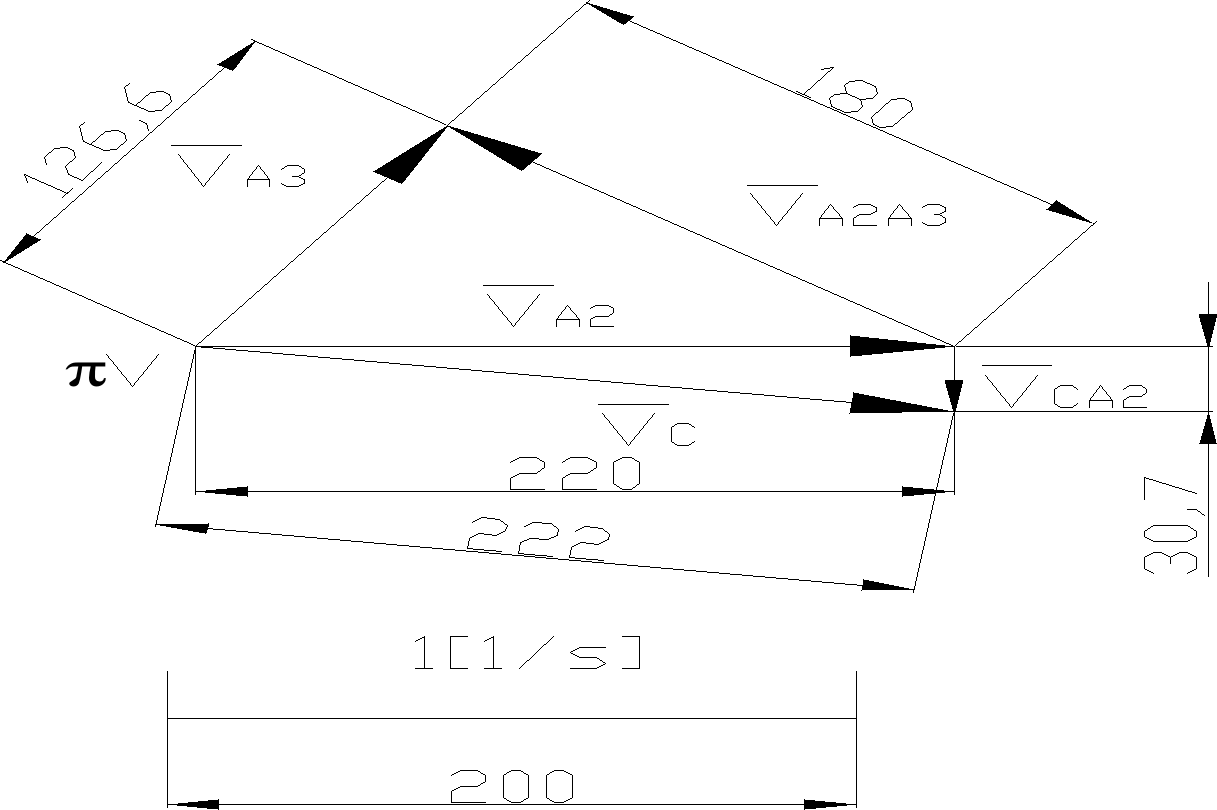
Plan prędkości
Z planu prędkości po uwzględnieniu skali odczytano następujące wartości
Wyznaczenie prędkości kątowej członu drugiego i trzeciego
![]()
Obliczenie przyśpieszeń mechanizmu metodą grafoanalityczną
Przyspieszenie kątowe członu napędzającego wynosi:
![]()
Przyspieszenie punktu A1
![]()
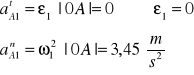
Wektor przyspieszenia atA1 jest prostopadły |0A|
Wektor przyspieszenia anA1 jest równoległy |0A|
Przyspieszenia punktu A2
aA1= aA2=3,45![]()
Przyspieszenie punktu A3
![]()
gdzie
Wektor przyspieszenia aA3n jest równoległy do |AB|
Wektor przyspieszenia aA3t jest prostopadły do |AB|
Wektor przyspieszenia aA3A2cor jest prostopadły do |AB|
Wektor przyspieszenia aA3A2t jest równoległy do |AB|
Wyznaczanie przyspieszenia punktu C
Wektor przyspieszenia aCA2n jest równoległy do |AC|
Wektor przyspieszenia a CA2t jest prostopadły do |AC|
Wyznaczanie przyspieszenia punktu S2
![]()
Przyjęcie podziałki rysunkowej dla planu przyśpieszeń:
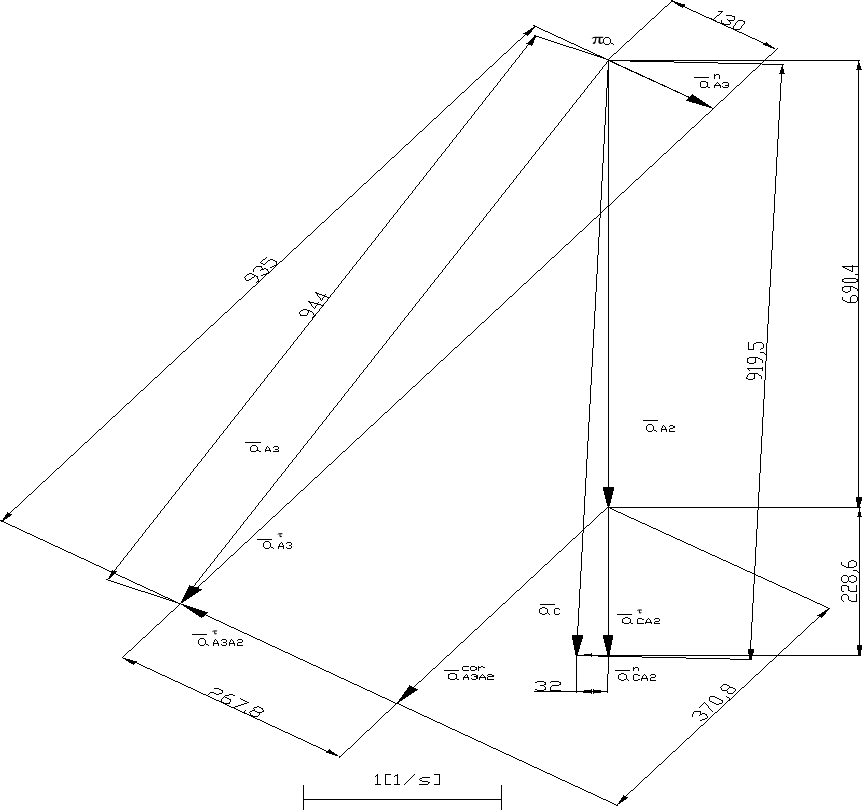
Plan przyspieszeń
Wyniki
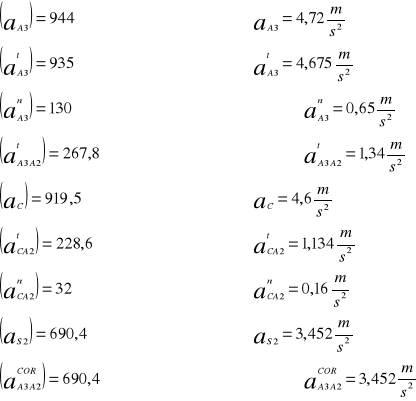
Wyznaczenie przyspieszenia kątowego członu trzeciego
Analiza kinematyczna mechanizmu metodą analityczną.
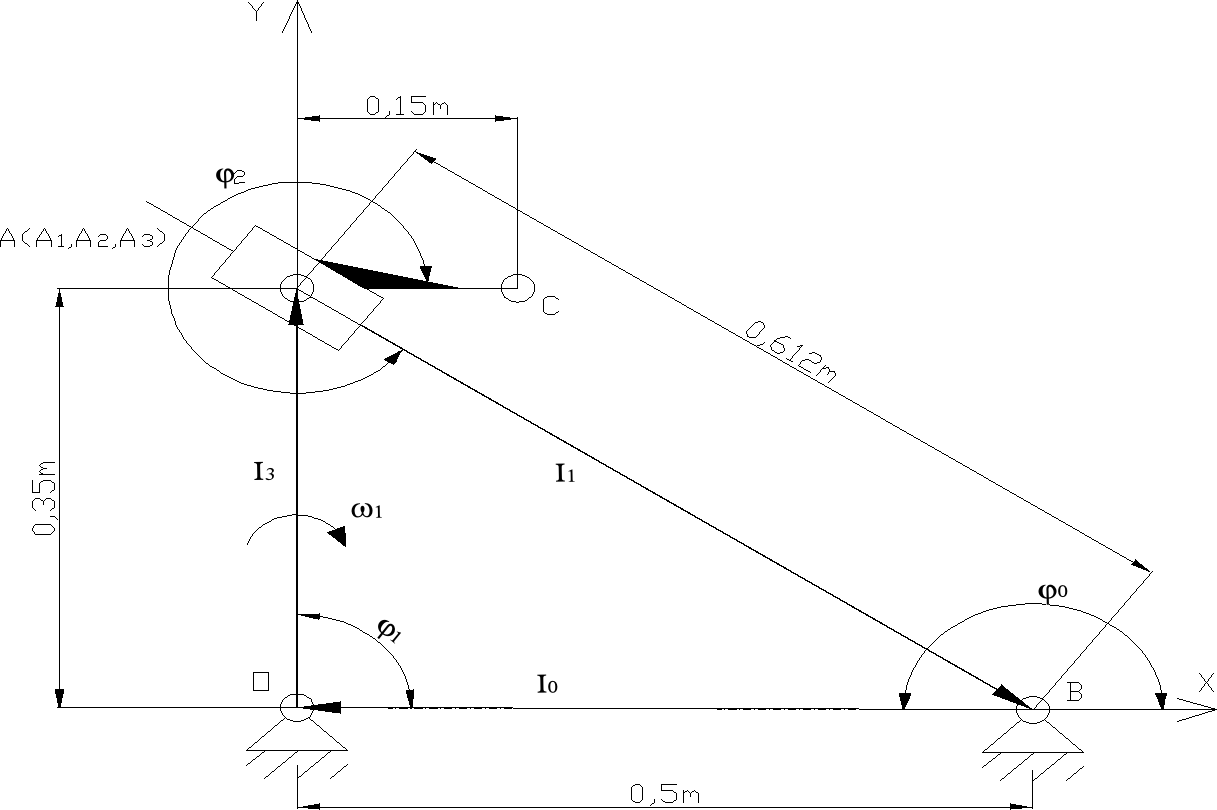
Schemat mechanizmu do analizy metodą analityczną
φ1(t) określa ruch członu napędzającego
φ2(t), l3(t), są funkcjami zmiennymi w czasie
Poniższe funkcje są funkcjami stałymi i nie zależą od czasu, przyjmują zawsze stalą wartość:
l1(t)=0,35[m]
l0(t)=0,5[m] φ0(t)=180 ◦
Dla zadanego położenia mamy
φ1(t0=0)=90[°] ω1(t0=0)=3,14 [1/s] ε1(t0=0)=0 [1/s2]
Wyznaczenie ogólnych równań ruchu
![]()
Po przyjęciu układu współrzędnych i zrzutowaniu na osie otrzymujemy:

Obliczenie nieznanych prametrów
Nieznany parametr φ2(t)
Po wstawieniu stałych parametrów otrzymujemy
Dla jednego położenia mamy:
![]()
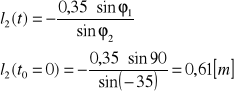
Nieznany parametr l2(t)
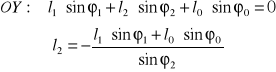
Po podstawieniu stałych parametrów mechanizmu oraz jednego położenia otrzymujemy
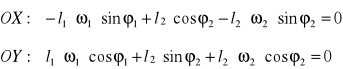
Analiza prędkości mechanizmu.
Różniczkując równania drogi po czasie otrzymamy zależność odpowiednich prędkości od czasu.
Nieznany parametr a2(t)
Obracając układ o kąt φ2(t) wyznaczy nieznany parametr z równania OX

Dla jednego położenia mamy
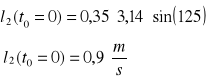
Nieznany parametr ω2(t)
Obracając układ o kąt φ2(t) wyznaczymy nieznany parametr z równania OY

Dla jednego położenia mamy
Określenie przyspieszeń mechanizmu
Różniczkując równania prędkości po czasie otrzymamy odpowiednie przyspieszenia.
Nieznany parametr a2(t)
Nieznaną wartość przyspieszania wyznaczymy bezpośrednio z równania prędkości od czasu przez wyznaczenie pochodnej tego równania

Dla jednego położenia mamy

Nieznany parametr ε2(t)
Nieznaną wartość przyspieszania wyznaczymy bezpośrednio z równania prędkości od czasu przez wyznaczenie pochodnej tego równania

Dla jednego położenia mamy

Analiza kinematyczna mechanizmu za pomocą programu SAM
Schemat mechanizmu zamodelowany w programie SAM
Schemat mechanizmu w SAMie
Wyniki analizy kinematycznej w programie
Wyniki analizy
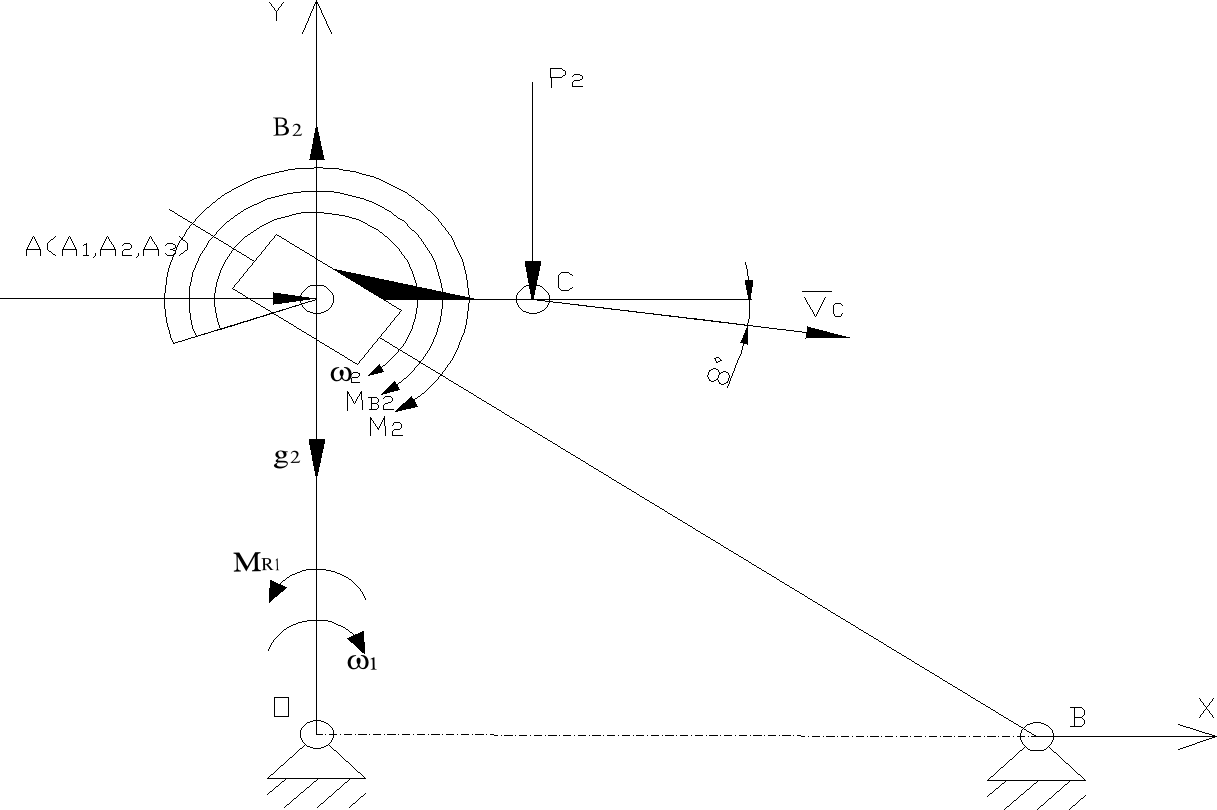
Analiza kinetostatyczna mechanizmu.
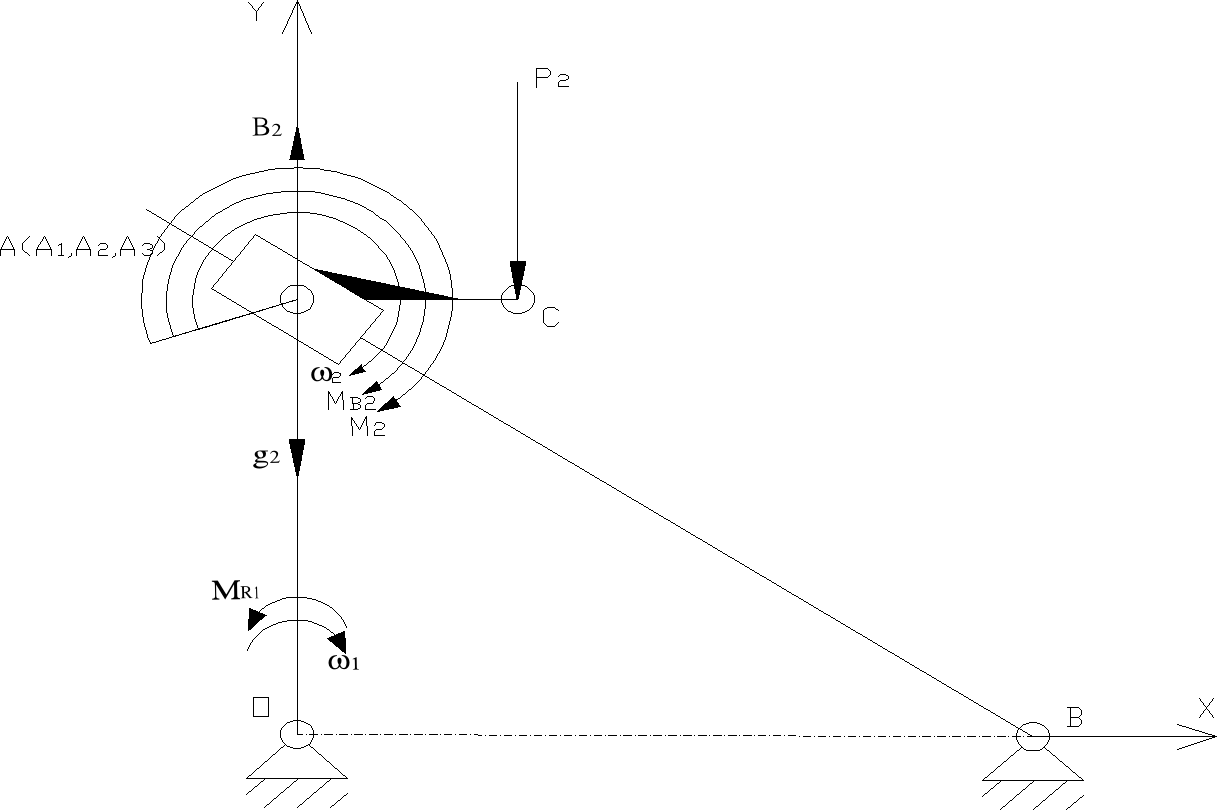
Mechanizm do analizy kienteostatycznej
Założenia analizy:
Przyjęto:
Wartości sił obciążających mechanizm:
M2=10Nm
P2=10N
Człon drugi mechanizmu posiada: masę m2= 1 kg
Moment bezwładności JS2
![]()
Mechanizm znajduje się w polu grawitacyjnym ![]()
Wyznaczenie sił bezwładności działających na mechanizm:
Wyznaczenie sił grawitacji działających na mechanizm:
Odrzucenie członu napędzającego, oraz uwolnienie układu od więzów
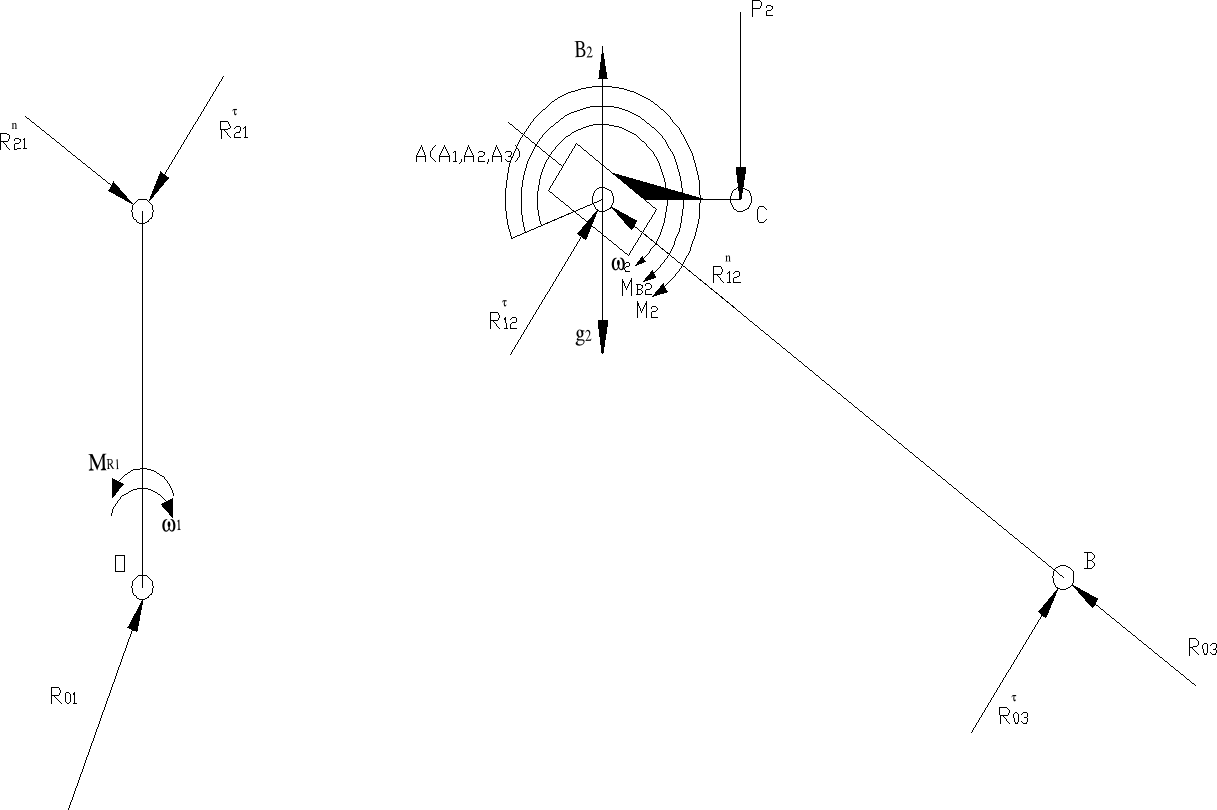
Uwolnienie układu od więzów (odrzucenie członu napędzającego)
Równanie wektorowe równowagi sił działających na grupę strukturalną
Dla grupy strukturalnej
![]()
Dla członu drugiego
![]()
Dla członu trzeciego
![]()
Wyznaczenie nieznanych reakcji z równania momentów i planu sił
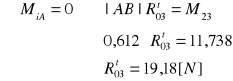
Wyznaczenie nieznanej reakcji M32 z równania momentów względem punktu B dla członu drugiego

Wyznaczenie nieznanej reakcji R t03 z równania momentów względem punktu A dla członu trzeciego
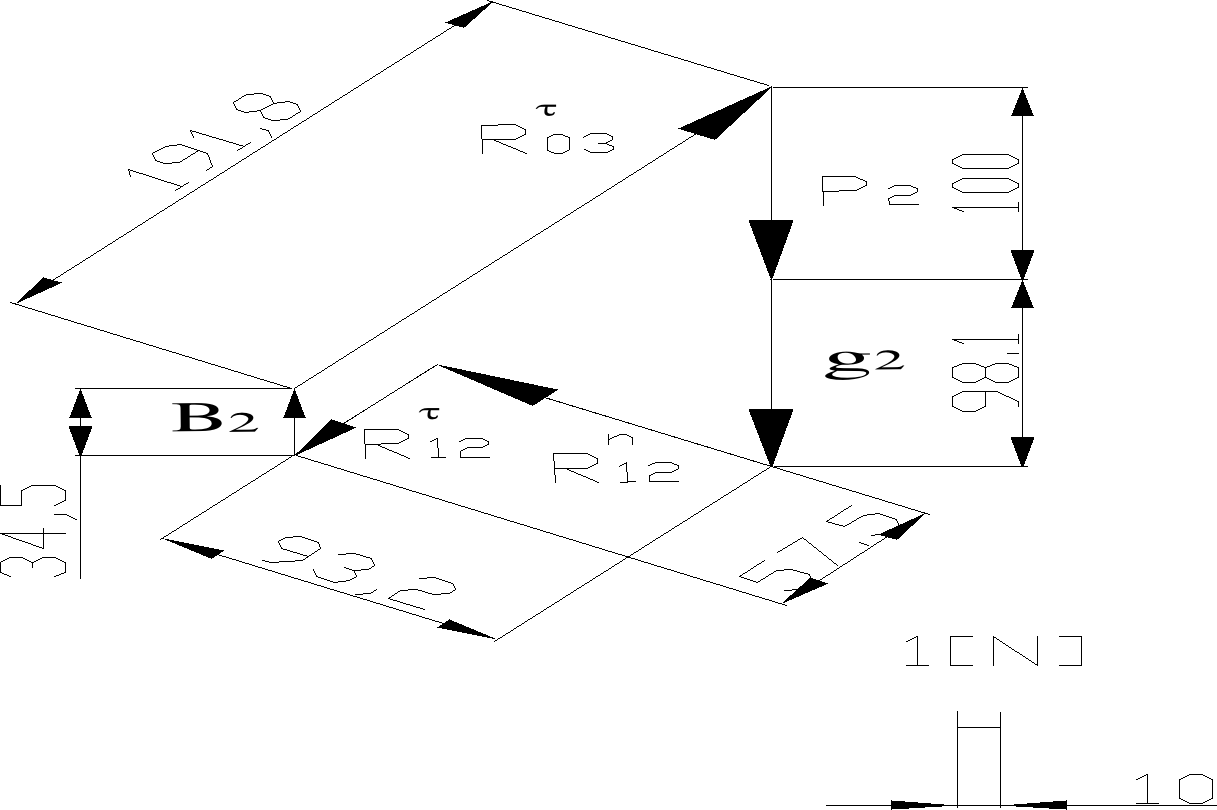
Plan sił
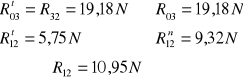
Na podstawie planu sił wyznaczono
Wyznaczenie siły równoważącej działającej na człon metoda mocy chwilowych
Mechanizm do analizy metodą mocy chwilowych

Siła równoważąca:
![]()
- 14 -
- 1 -
![]()
![]()
Wyszukiwarka
Podobne podstrony:
TMM - Projekt 6B(1), Mechatronika AGH IMIR, rok 2, TMM, 1A, 2A, 3A, 4B, 5B, 5A, 6A, 7B
TMM - Projekt 6B, AGH, Semestr 4, TMM, TMM, 1A, 2A, 3A, 4B, 5B, 5A, 6A, 7B
Tmm sprawko 1, Mechatronika AGH IMIR, rok 2, TMM
tablice terrma2, Mechatronika AGH IMIR, rok 2, TMM, tmm
tablice terma, Mechatronika AGH IMIR, rok 2, TMM, tmm
TMM Laboratoria, Mechatronika AGH IMIR, rok 2, TMM
gr.5-06-kart1, Mechatronika AGH IMIR, rok 2, TMM, tmm
TMM 3Aa, Mechatronika AGH IMIR, rok 2, TMM, 3a projekt TMM
smak ciszy, Mechatronika AGH IMIR, rok 2, TMM, tmm
Projekt TMM 1A(1), Mechatronika AGH IMIR, rok 2, sprawozdania, TMM, inne projekty, Projekt 1a
blabla2, Mechatronika AGH IMIR, rok 2, sprawozdania, TMM
charakterystyki 2 2, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
metr-koło 4, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
Teora sterowania lab2, Mechatronika AGH IMIR, rok 2, Teoria sterowania, lab2 grzybek
STAT.KONTR.JAKOŚCI, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
TSIId Mech EGZAMIN, Mechatronika AGH IMIR, rok 2, Teoria sterowania
więcej podobnych podstron