Politechnika Śląska
w Gliwicach
Wydział Elektryczny
Sem.VI
REGULACJA PID
SEKCJA V (EE)
Czaplok Krzysztof
Herka Dariusz
Kozieł Piotr
Wejs Jacek
WPROWADZENIE
Regulacja -jest to sterowanie w układzie zamkniętym , a wiec w układzie ze sprzężeniem zwrotnym.
Każdy układ regulacji automatycznej jednej zmiennej można przedstawić za pomocą schematu blokowego np.:
Z
XO + ε U X
-
X
Podstawowymi członami układu regulacji są : obiekt regulacji oraz regulator. Podstawowymi sygnałami w układzie regulacji są natomiast: sygnał regulowany x ,sygnał wartości zadanej xo , sygnał uchybu ε oraz sygnał sterujący u , a także sygnał zakłócający z.
Członem pierwotnym struktury układu regulacji jest obiekt regulacji .Jest to układ ,którego struktury wewnętrznej zmienić nie można ,natomiast można wytypować pewną wielkość charakteryzującą działanie obiektu , którą to wielkość zamierzamy regulować.
Mówiąc o regulowaniu mamy na myśli nadawanie wielkości regulowanej pożądanych wartości lub przebiegów - określonych przez sygnał wartości zadanej.
Sens stosowania regulacji wynika z obecności zakłóceń .Sygnał sterujący określa czym można oddziaływać na obiekt dla osiągnięcia zamierzonego celu .
Wreszcie uchyb regulacji stanowi elementarną miarę spełniania zadania (uchyb powinien być stale równy zeru)
Pod względem sposobu realizacji regulacji układy regulacji można podzielić na następujące grupy:
Układy regulacji ciągłej
Układy regulacji impulsowej
Układy regulacji przekaźnikowej
Taki podział jest przydatny przede wszystkim z punktu widzenia metody analizy :ukł. ciągłe staramy się w miarę możliwości przedstawić za pomocą modeli liniowych i stosować opisy transmitancyjne , w szczególności częstotliwościowe Układy impulsowe staramy się podobnie opisywać transmitancjami dyskretnymi. Układy przekaźnikowe są z zasady nieliniowe.
Na rysunku przedstawiono schemat blokowy jednopętlowego ukł. regulacji stałowartościowej (zestaw urządzeń potrzebnych do budowy układu automatycznej regulacji)
Do najczęściej stosowanych regulatorów można zaliczyć następujące typy regulatorów:
Proporcjonalno-całkowy PI
![]()
Proporcjonalno-różniczkowy PD
![]()
Proporcjonalno-całkowo-różniczkowy PID
![]()
![]()
zakres prop. Ti - czas zdwojenia Td - czas wyprzedzenia
Idealnego działania różniczkującego o transmitancji sTd nie można praktycznie zrealizować. Dlatego częściej akcja różniczkująca opisywana jest wyrazem sTd/(1+sT), a transmitancja regulatora jest wówczas następująca:
Stałe kr, Ti, Td występujące w podanych transmitancjach noszą nazwy:
kr - wzmocnienie proporcjonalne
Ti - czas zdwojenia (stała czasowa akcji całkującej)
Td- czas wyprzedzenia (stała czasowa akcji różniczkującej)
Zamiast wzmocnienia proporcjonalnego kr podaje się często tzw. zakres proporcjonalności Xp w procentach.
Stała czasowa T występująca we wzorze jest zwykle związana ze stałą Td za pomocą wzmocnienia dynamicznego:
przy czym wartość kd zawiera się w granicach 6÷15.
Podstawowym warunkiem trafnego wyboru rodzaju regulatora jest znajomość, choćby przybliżona, właściwości obiektu regulacji. Zgodnie z ogólną klasyfikacją wyróżniamy obiekty statyczne i astatyczne.Transmitancje opisujące te grupy obiektów przedstawia się najczęściej w postaci :
gdzie:
τ - zastępcze opóźnienie obiektu
T - zastępcza stała czasowa obiektu
k - współczynnik proporcjonalności
Wśród praktyków najbardziej są rozpowszechnione reguły doświadczalne nastawiania regulatorów opracowane przez Zieglera i Nicholsa, które prowadzą do uzyskania przebiegów przejściowych z przeregulowaniem 20% i minimum czasu regulacji.
Regulator PID łączy zalety wszystkich elementów regulacji:
( I ) zapewnia astatyzm przy rozszerzonym paśmie regulacji z zachowaniem zapasu stabilności ( P, D ).
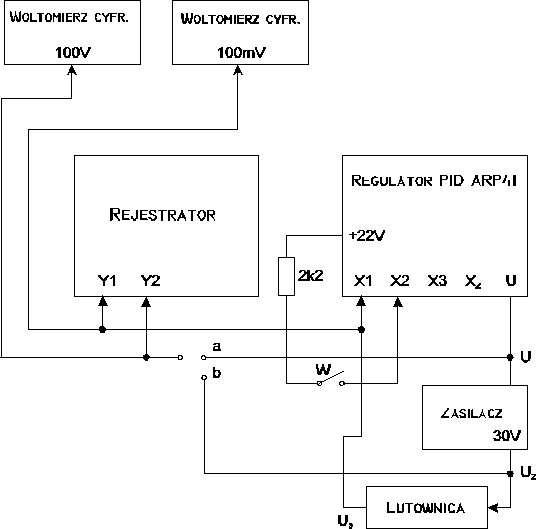
Stanowisko pomiarowe
- regulator PID typ ARP-41
- zasilacz
- lutownica (czyli obiektu regulacji)
- rejestrator
- woltomierz cyfrowy do kontroli sygnału nastawiającego U
- woltomierz cyfrowy do kontroli wielkości regulowanej (temperatury)
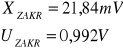
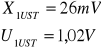
POMIARY
Wartości uzyskane z pomiaru : T=25,73 U=1,06 V
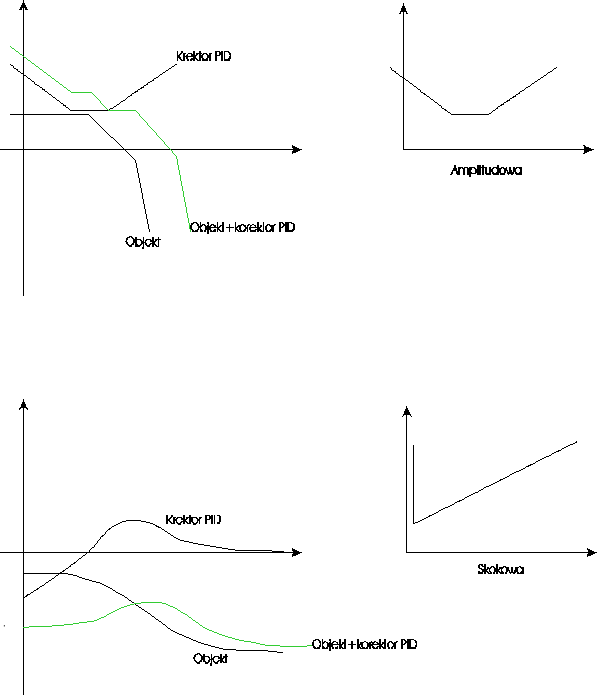
Wartości odczytane z wykresu:
stała czasowa obiektu T = 84s = 1,24min
czas opóźnienia τ = 6s = 0,1min
Współczynnik wzmocnienia:
Posługując się tabelą optymalnych nastaw regulatora PID i zakładając X = 20% min tr określiliśmy nastawy regulatora:
Po zadaniu powyższych nastaw i wykreśleniu przebiegu regulacji zmieniamy parametry nastaw:
zwiększamy Td o 40% Td=0,056
zwiększamy Ti o 40% Ti=0,28
WNIOSKI
Niedokładność nastaw regulatora związana jest z interakcją.
Zmiana wartości Td o 40% (0,056) spowodowała zwiększenie niedokładności regulacji (wzrost uchybu regulacji) , zmniejszenie częstotliwości oscylacji , wydłużenie czasu regulacji ( wykres 2).
Zmiana wartości Ti o 40% (0,28) spowodowała duże zwiększenie niedokładności regulacji w porównaniu z wykresem nr.2 i nieco częstsze oscylacje (wykres 3 ).
Wzmocnienie dynamiczne
kd = 0,03 (wykres 1)
kd = 0,045 (wykres 2 i 3)
Zwiększa amplitudę oscylacji i powoduje wydłużenie czasu regulacji.
Czas wyprzedzenia Td określa intensywność działania różniczkującego regulatora.
Podniesienie wartości Td o 40% powoduje zwiększenie podatności układu na zakłócenia i szumy przetwornika (a co za tym idzie pogorszenie regulacji) nie przynosząc żadnych korzyści (![]()
).
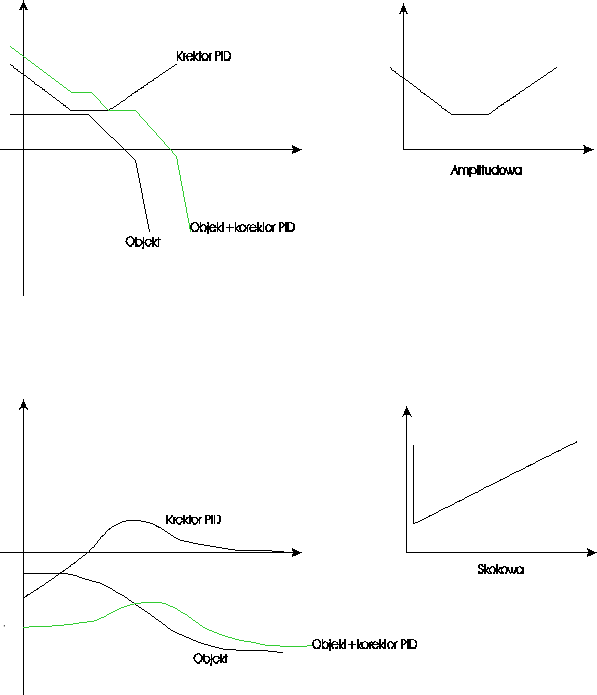
Przy wzroście współczynnika kr (zmniejszeniu współczynnika proporcjonalności) następuje poszerzenie pasma roboczego.
OBJEKT
REGULATOR
Rysunek . Ogólny schemat blokowy ukł. regulacji
OBJEKT
CZUJNIK
NADAJNIK WARTOŚCI
ZADANEJ
ELEMENT NASTAWCZY
SIŁOWNIK
PRZETWORNIK
POMIAROWY
CZŁON DYNAMICZNY
REGULATOR
URZĄDZENIE WYKONAWCZE
URZADZENIE POMIAROWE
![]()
Wyszukiwarka
Podobne podstrony:
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
automaty-sprawko-pid, Temat ćwiczenia: REGULATORY PID
automatyka regulator pid nr 1
BADANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH REGULATORÓW PID, SGGW Technika Rolnicza i Leśna, Auto
BADANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH REGULATORÓW PID 2, SGGW Technika Rolnicza i Leśna, Au
Ćw.2.Cyfrowy regulator PID, Elektrotechnika - notatki, sprawozdania, podstawy automatyki i regulacji
nastawa regulatora pid, Studia, Automatyka
Podstawy Automatyki Lab 10 CW6 ?danie regulatora PID
automatyka projekt regulator pid n=2
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
Automatyczne strojenie regulatora pid w ukladzie on line na podstawie identyfikacji metoda przekazni
REGULACJA PID , Energetyka, sem5, sem5, met.ZN
BADANIE STATYCZNYCH I DYNAMICZNYCH WŁAŚCIWOŚCI REGULATORÓW PID
04Nastawy regulatora PID
Badanie układu sterowania z regulatorem PID
Regulator PID Cool
Regulator PID (2)
więcej podobnych podstron