Czujniki 1 - fotoelektryczne ( optyczne )
Czujniki - Wstęp
Trudno wyobrazić sobie jakąkolwiek bardziej rozbudowaną aplikację bez detekcji tego, co dzieje się w urządzeniu.
Często stajemy przed dylematem - jaki czujnik wybrać, o co pytać, co będzie działało niezawodnie, jaki producent, typ, obudowa, parametry… itd itd
Dobór czujnika zaczynam od określenia wszystkich parametrów jakie musi spełniać czujnik. Następnie analizuję miejsce, sposób montażu , określam najlepszą dla niego obudowę oraz warunki w jakich będzie pracować.
Dopiero po kompleksowych przygotowaniach przystępuję do doboru właściwego typu czujników. Czasami po wnikliwej analizie muszę zmienić wstępnie przyjęte parametry, zmienić typ czy rodzaj czujnika . Nie jest problemem dobór czujnika - problem w tym by pracował on bezawaryjnie i w miarę bezobsługowo przez najbliższe lata.
Przykład dokonywanego prze ze mnie doboru czujnika :
Co wykrywam : różnokolorowe kartony jadące po taśmociągu. Szerokość : 150 - 400mm, Montaż na transporterze, warunki - sucho, małe zapylenie, szybkość aplikacji- standard.
Wiec wybieram :
-Wstępnie grupa produktów : fotoelektryczne ( ze względu na dużą różnicę szerokości oraz różne kolory opakowań najlepiej sprawdzi się tu czujnik refleksyjny . Aby zniwelować wpływ kolorów i zabezpieczyć się przed zaburzeniami np. związanymi z możliwością pojawienia się koloru czarnego - wybieram czujnik współpracujący z lustrem )
- Kartony są produktem dużym, pewnym, nie przeźroczystym więc będę szukał wśród czujników ogólnego przeznaczenia.
-Światło dowolne : preferowane czerwone by uprościć sposób ustawienia lustra.
- Zasięg - szerokość transportera to 800mm - wybieram więc czujnik o zakresie działania tak by jego praca znajdowała się w miarę możliwości w środku zakresu podanego przez producenta
-Obudowa - ze względu na małą ilość miejsca - nie chcę by czujnik wystawał zbyt wiele za transporter ( możliwość uszkodzenia ) wybieram czujnik w obudowie kompaktowej ( prostokątnej)
- Duża odległość od szafy sterowniczej oraz trudno dostępne koryta kablowe wskazują na wybór czujnika z przyłaczem ( gniazdem) . W przypadku uszkodzenia - wymienię sam czujnik w ciągu 1 minuty , bez konieczności wymiany kabla.
- Materiał obudowy - warunki pracy pozwalają na zastosowania ekonomiczne - wystarczy tworzywo.
- Kąt kierunkowy nie jest ważny - produkt jest duży( nie mam konieczności precyzyjnego pozycjonowania ), zasilanie 24 V DC ( takim dysponuję w systemach sterowania), Wyjście NO ( bo tak mi prościej), PNP ( bo tak mam skonfigurowane wejścia sterownika PLC z którym czujnik będzie pracował ), IP min 54 ( sucho, czysto ale … )
Spojrzenie po katalogach , prośba o wycenę od kilku dostawców i wybieram o najlepszym stosunku ceny do jakości. :):)
Rodzaje czujników
1) Czujniki fotoelektryczne - Ich działanie polega na wysłaniu i odbiorze właściwie zmodulowanej wiązki światła. Elementy znajdujące się na torze światła przerywają lub zakłócają wiązkę wywalając wyjście sterujące. Czujniki wykorzystują szerokie spektrum światła. Najczęściej wykorzystują światło czerwone lub z zakresów podczerwieni.
Budowa nadajnika i odbiornika eliminuje niekorzystny wpływ innego oświetlenia.
Zalety : Wiele typów, zastosowań, różnorodna konstrukcja, duży zasięg.
Wady : Wrażliwość na zabrudzenia i zaparowania czujników, luster. Wrażliwość na zmiany kolorów czy matowości powierzchni. Częste problemy z wykrywaniem materiałów transparentnych ( przeźroczystych lub półprzeźroczystych)
Czujniki optyczne możemy podzielić na różne kategorie :
a) podział ze względu na typ czujnika:
- nadajnik - odbiornik ( bariera)składa się z dwóch osobnych elementów: nadajnika i odbiornika umieszczonych po obu stronach przestrzeni kontrolowanej. Czujniki wykrywają obiekty pojawiające się miedzy nadajnikiem a odbiornikiem. Mają najdłuższą strefę działania.
- refleksyjne - Nadajnik i odbiornik umieszczone w jednej obudowie. Światło odbijane od elementu odblaskowego. Przesłonięcie wiązki powoduje zdziałanie czujnika. Są nie wrażliwe na kolor produktu kontrolowanego, mają większy zasięg.
- Odbiciowe od obiektu Nadajnik i odbiornik umieszczone są w jednej obudowie. Analizują wiązkę pulsującego świata odbitego od obiektu .
- Odbiciowe od obiektu szerokowiązkowe
- Odbiciowe z eliminacją wpływu tła nie reagują na zmianę kolorów produktu, umożliwiają detekcję produktów przeźroczystych ( transparentnych), Często z Funkcją
MSR.
b) Ze względu na dedykowane zastosowanie
- Czujniki ogólnego przeznaczenia
- Czujniki znaczników
- Czujniki laserowe
- Czujniki do materiałów transparentnych ( przeźroczystych) - posiadają małą histerezę przełączania - dzięki temu reagują na najmniejsze odchylenia od stanu zerowego.
- monitorujące stan i wykrywane błędów
- detekcja elementów kolorowych - emitują pulsacyjne światło w trzech podstawowych kolorach czerwonym, niebieskim i zielonym Odbite światło jest wzmacniane i analizowane a następnie porównywane ze wzorcem zapisanym w pamięci.
- Czujniki dalekiego zasięgu - nawet do 60m
- Z funkcjami specjalnymi ( np. przekaźnikiem czasowym)
- Przystosowane do obiektów o różnej strukturze ( np. z otworami itp)
- Kurtyny bezpieczeństwa
- Czujniki systemów wizyjnych - wyposażone w czujnik obrazu itd.
- Czujniki pomiaru odległości. Mierzą czas od wysłania impulsu świetlnego przez diodę do jego powrotu.
c) Ze względu na typ światła
-podczerwień
-światło czerwone
-laserowe - szczególną zaletą jest mała wielkość plamki i duży zasięg. Niezastąpione do detekcji małych przedmiotów oraz tam gdzie istnieje konieczność dokładnego pozycjonowania materiałów.
d) Ze względu na zasięg
- Zazwyczaj od 10mm do 100m. Część czujników posiada posiada płynną regulację zasięgu za pomocą wbudowanego potencjometru. Za zasięg uznajemy maksymalną odległość czujnika od odblasku ( dla czujników refleksyjnych), maksymalną odległość od czujnika do obiektu testowanego ( dla czujników obiciowych) , maksymalną odległość od nadajnika do odbiornika ( dla barier) maksymalną odległość od elementu badanego zapewniającą właściwe działanie czujnika ( dla czujników specjalnych). Należy pamiętać że zasięg zależy także w dużej mierze od materiału i koloru obiektu podlegającego detekcji. Ze względu na różne stopnie rozpraszania i pochłaniania światła - mozna przyjąć współczynniki korekcyjne zasięgu : np. materiały białe : brak ( 1) , materiału odblaskowe ( blacha ocynkowana, aluminium polerowane ) 1,2 - 1.8, Powierzchnia chropowata czarna matowa 0,1, Powierzchnia chropowata czarna błyszcząca 0,3 itd.
e) Ze względu na obudowę
-kompaktowe ( prostokątne)
-cylindryczne ( M8, M12, M18 itd)
-Specjalne
-Miniaturowe
-Widełkowe ( szczelinowe) typu bariera .Nadajnik i odbiornik zamocowany na stałe w jednym korpusie typu C powalające na prosty montaż i dokładność ustawienia.
-Światłowodowe - najczęściej stosowane w miejscach niedostępnych, wysokiej temperaturze, warunkach agresywnych. Na obiekcie zainstalowane są wyłącznie światłowody - wzmacniacz może zostać zabudowany wiele metrów dalej np. w skrzyni rozdzielczej.
-Mikroczujniki
(MSR - funkcja likwidująca zakłócenia i odbicia powodowane refleksami i odbiciami. Zastosowanie podobnych funkcji jest wskazane w celu detekcji np. elementów z przeźroczystego materiału, szkła, poliwęglanu itp. )
f) Ze względu na przyłącze :
- Kabel o długości 2,5,10mb
- Gniazdo M8 3-4pin - Gniazdo M12 3 -4pin Złącze M8 lub M12 z kablem np. 300mm
g) Ze względu na materiał obudowy
- Tworzywa ( np. PBT, ABS )
- Stal nierdzewna
- Mosiądz
- Odlew cynkowy
- Aluminium
Oczywiście na tym nie kończą się problemy z doborem czujników. Na ich przydatność, bezawaryjność oraz sposób pracy duży wpływ ma jeszcze wiele innych parametrów :
- Kąt kierunkowy - mający wpływ na rozproszenie światła, wielkość obiektu który mamy wykryć itd
- Napięcie zasilania : zazwyczaj 12-24 DC choć jest wiele czujników mogących pracować na różnych napięciach AC/DC
- Wyjście sterujące
: Normalnie otwarte lub Normalnie zamknięte ( NO lub NC)- czyli przy wzbudzeniu czujnika na wyjściu pojawi się stan wysoki lub niski. Specjalną odmianą czujników - są czujniki z wyjście analogowym - gdzie zamiast sygnału cyfrowego ( o lub 1) otrzymujemy ciągły sygnał (0-10V, 4-20mA itp) proporcjonalny do siły sygnału, bliskości obiektu itp.
: Rodzaj tranzystora - NPN lub PNP ( czyli po „naszemu - na wyjściu sterującym przy zasilaniu napięciem 24 DC pojawia się minus ( 0V) lub napięcie (24 V DC))
: Wyposażenie czujnika w obwody zabezpieczające : np. przed odwróceniem polaryzacji, przed zwarciem na wyjściu itd.
: Czas odpowiedzi - czyli czas od wykrycia obiektu do wyzwolenia wyjścia sterującego - szczególnie ważny w szybkich aplikacjach.
: Temperatura pracy - Jeżeli czujnik ma działać w temperaturze nie mieszczącej się w zakresie 20 - 45 st.C, proponuję sprawdzić kartę katalogową przed zakupem.
: Stopień ochrony - tzw. IP . Jeżeli nasz czujnik będzie narażony na działanie czynników zewnętrznych jak zapylenia czy wody - musimy koniecznie dobrać właściwą gwarantowaną ochronę. A na zakładach gdzie Panie szaleją z urządzeniami wysokociśnieniowymi - bez IP69K lepiej nie podchodzić… Szkoda naszej roboty i czasu.
:Ustawienia Wejść/Wyjść - możliwość „uczenia” się, dostrajanie, zerowanie, zmiana NO/NC itd.
: Histereza -czyli różnica odległości obiektu badanego przy której następuje wysterowanie wyjścia .
: Napięcie szczątkowe - napięcie pozostające na wyjściu sterującym przy jego stanie OF.
Przykładowi producenci czujników :
Balluff- gorąco polecam, szeroka oferta, dobre wsparcie . Warte swojej ceny.
Czujniki indukcyjne
Czujniki 2 - Czujniki Indukcyjne
Zasada działania
Czujnik Indukcyjny kontroluje pole magnetyczne występujące na skutek pojawienia się metalowego elementu w pobliżu jego czoła ( punktu pomiarowego)
Zastosowanie - wszędzie tam gdzie obiekt wykrywany jest metalowy.
Zalety: łatwa dostępność, niska cena, bezawaryjność, odporność na warunki zewnętrzne.
Wady : krótki zasięg, wykrywanie tylko materiałów metalowych.
Ze względu na bezsprzeczne zalety często stosuję je zamiast czujników optycznych - wykrywając za pomocą dodatkowych ramionek czy dźwigien różnych produkty z materiałów innych niż metal . ( np. karton działa na pręt który zbliża się do czujnika indukcyjnego)
Rodzaje czujników indukcyjnych w zależności od :
a) Obudowy
- cylindryczne ( M4,M6,M8,M12,M18, fi 6, fi 8 itd)
- miniaturowe ( np. fi 3, fi 4)
-kompaktowe ( prostokątne)
- specjalne
b) Budowa czoła
- czoło zakryte : detekcja elementu tylko od strony czoła
- czoło odkryte : detekcja elementu od strony czoła i boków głowicy.
c) Zakres działania : ( od 0,4mm (miniaturowe) do 20 mm ( dalekiego zasięgu)
d) Wykonania :
- standardowe
- certyfikowane do pojazdów
- stref zagrożonych wybuchem
- Odpornych na środki chemiczne, środki myjące, oleje
- Odpornych na temperaturę
- Precyzyjnych : do ustalania odległości nawet do Mikrometra.
e) Wyjścia sterującego
- Bezpotencjałowe - styk przełączany gdy czujnik zostaje zainicjowany,
- PNP - czujnik zainicjowany wystawia na wyjściu stan wysoki bliski jego napięciu zasilania
- NPN - czujnik zainicjowany wystawia na wyjściu stan niski 0 V
- Czujniki indukcyjne z wyjściem analogowym
0;4..20 mA - czujnik włączony wystawia na wyjściu sygnał w zakresie 0..20 mA lub 4..20 mA w zależności od odległości inicjatora od czujnika
0..10 V - czujnik włączonyu wystawia na wyjściu sygnał w zakresie 0..10 V w zależności od odległości detalu od czujnika
f) Zasilanie : Szeroki wybór w zakresach 12 - 230V AC/DC
g) Przyłącze przewodów - jak w czujnikach optycznych.
Zobacz też
Specyfikacja:
Napięcie zasilania diody: 5 V
Maksymalny prąd diody: 50 mA
Maksymalne napięcie kolektor-emiter: 32 V
Maksymalny prąd kolektora: 50 mA
Opis
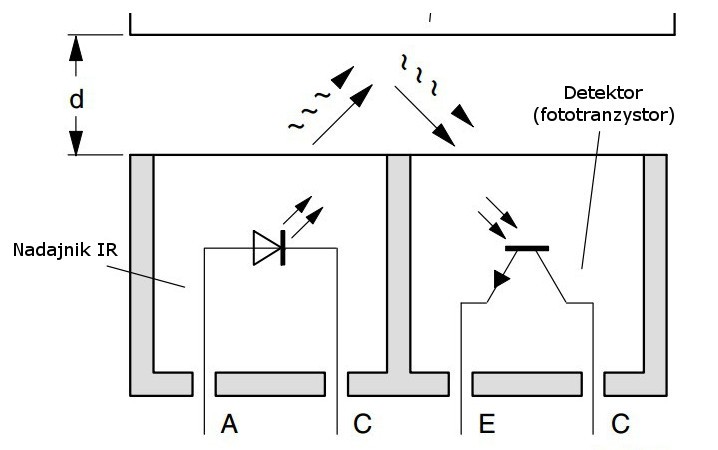
Czujnik wysyła wiązkę promieniowania poprzez nadajnik podczerwieni, a następnieza pomocą fototranzystora, mierzy natężenie światła odbitego. Wyjściem jest sygnał napięciowy, zależny od natężenia światła padającego na ten detektor. Im więcej światła się odbije i dotrze do fotodetektora tym napięcie na wyjściu będzie miało wyższą wartość. Jako że promieniowanie świetlne lepiej odbija powierzchnia jasna ( a ciemna pochłania), dlatego napięcie będzie wyższe na białym materiale.
Zastosowanie
Czujniki są chętnie wykorzystywane przez konstruktorów robotów Line Follower do detekcji linii oraz w konstrukcjach minisumo, gdzie służą do wykrywania krawędzi ringu. Jako, że w tych przypadkach wykrywane są wartości skrajne (odróżnianie czarnego od białego - wartości pośrednie nie są istotne), czujnik może znajdować się wyżej nad powierzchnia niż wskazuje dokumentacja. Z naszego doświadczenia wynika, że przy odpowiednim dobraniu rezystorów, sensory prawidłowo rozróżniają czarną taśmę izolacyjną od białego tła z odległości około 1cm.
W przemyśle układy można wykorzystać np. do detekcji krawędzi lub wykrywaniu obiektów z bliskiej odległości. Czujnik posiada łatwą w montażu obudowę przewlekaną. Dodatkowo zamontowano otoczkę ochroną, która nie pozwala na całkowite dociśnięcie detektora i nadajnika do podłoża.
Przykład podłączenia
Czujnik składa się z dwóch głównych części: detektora w postaci fototranzystora, oraz nadajnika, którym jest dioda podczerwona. Aby nadajnik nie uległ zniszczeniu należy ograniczyć jego prąd (maks. 50mA), a co za tym idzie moc promieniowania podczerwonego. Wykonuje się to stosując rezystor włączony szeregowo (R3). Dla poprawnego działania fototranzystora niezbędny jest rezystor podciągający (oznaczony na rysunku jako R4). Odpowiednie wartości należy dobrać posługując siędokumentacją (przykładowe na schemacie poniżej).
Przydatne linki |
Transoptor odbiciowy: Wpływ ruchu powierzchni na odpowiedź transoptora
Autor: Dondu
Artykuł jest częścią cyklu: Transoptory
Do tej pory rozpatrywaliśmy przypadki, gdy czujnik był naprzeciwko powierzchni, która nie miała ograniczeń i nie była w ruch.
Wykorzystując transoptory odbiciowe z reguły spotkamy się jednak z sytuacją, w której powierzchnia przesuwa się przed transoptorem. Na przykład jest to enkoder obrotowy z tarczą, która obraca się na osi, a transoptor obserwuje naniesione na tarczy białe i czarne pola np. w obrotomierzu: Obrotomierz na AVR ATmega8..
Dlatego też w datasheet można znaleźć wykresy pokazujące jak stromych zboczy należy się spodziewać przy danym przesunięciu ograniczonej powierzchni względem transoptora oraz odległości czujnika od powierzchni.
I znowu do omówienia wykorzystamy transoptory:
W przypadku CNY70, w datasheet znajdziesz wykres:
Transoptor odbiciowy CNY70 |
Wykres ten wymaga bardziej szczegółowego wyjaśnienia stąd poświęcimy mu cały artykuł.
Warunki testowe określone zostały następująco:
napięcie kolektor-emiter VCE=5V,
prąd diody IF=20mA,
nie podano jaki kolor ma powierzchnia, należy więc przyjąć, że taki sam jak w poprzednich przypadkach, czyli biały.
Zacznijmy od tego, że na wykresie znajdujemy dodatkowe rysunki pokazujące ustawienie czujnika wobec ograniczonej powierzchni, dla dwóch kątów ustawienia czujnika:
Transoptor odbiciowy CNY70 |
Rozdzieliłem je czerwoną linią, a na razie interesować nas będzie tylko ten górny.
Co on przedstawia?
Przedstawia on sposób przesuwania się obserwowanej powierzchni przed czujnikiem. Aby łatwiej było zrozumieć przygotowałem prostą animację:
Animacja pokazująca przemieszczanie |
Widzisz na niej jak powierzchnia odbijająca światło (biała) przesuwa się przed czujnikiem, dla trzech stanów przesunięcia - 0mm, 5mm oraz 10mm. Zauważ, że powierzchnia z jednej strony (na dole) jest nieskończona, a z drugiej (na górze) jest skończona.
Oznacza to, że w dokumentacji przyjęto jako test nie białą i czarną powierzchnię, lecz białą i ... brak jakiejkolwiek powierzchni. Jeżeli brak powierzchni przed czujnikiem, to światło nie ma się od czego odbić, więc działa jak kolor czarny, a nawet lepiej :-)
Uzupełniłem wykres o dodatkowe rysunki w dolnej części przedstawiające powyższe stany odnosząc je do odpowiednich wartości przesunięcia na wykresie:
Transoptor odbiciowy CNY70. |
Sądzę, że teraz będzie znacznie prościej zrozumieć rysunek i wykres z datasheet.
Położenie 0mm
To pierwszy skrajny przypadek, w którym krawędź powierzchni białej znajduje się co najmniej 1,5mm od krawędzi obudowy transoptora (w każdym kierunku):
Transoptor odbiciowy CNY70 |
W tym położeniu największa ilość światła odbija się od powierzchni (białej) przez co uzyskujemyrelatywnie największy prąd kolektora zbliżony do 1 (100%), co odczytujemy z wykresów.
Położenie 5mm
To moment, w którym powierzchnia przesunęła się względem transoptora w taki sposób, że krawędź pola białego znalazła się dokładnie w połowie obudowy transoptora:
Transoptor odbiciowy CNY70. |
W tym wypadku relatywny prąd kolektora wynosić będzie 0,5 (50%), co odczytujemy z wykresów.
Położenie 10mm
To drugi skrajny przypadek, w którym powierzchnia znajduje się dalej niż 1,5mm od dowolnej krawędzi obudowy transoptora:
Transoptor odbiciowy CNY70. |
W tym przypadku czujnik teoretycznie nie widzi już powierzchni, przez co relatywny prąd kolektora jest bliski 0 (0%), co także odczytujemy z wykresów.
Jednakże zauważ, że w zależności jak duża jest odległość od powierzchni (d), wykresy dla tego przypadku nie dochodzą do zera im większa jest odległość d. Jest to spowodowane oczywiście kątem emisji światła i widzenia fototranzystora.
Przykład wykorzystania wykresu
Załóżmy, że masz taki przypadek:
napięcie kolektor-emiter VCE=5V,
prąd diody IF=20mA,
prąd kolektora ustawiony na IC=0,9mA,
odległość fototranzystora od powierzchni d=4mm,
przesunięcie krawędzi s=3mm.
Wyznaczamy więc relatywny prąd kolektora:
Transoptor odbiciowy CNY70. |
i otrzymujemy wartość 0,85.
Stąd już prosta droga do określenia faktycznego prądu jaki powinniśmy otrzymać na wyjściu transoptora przy założonych warunkach pracy:
Kąt nachylenia zbocza sygnału
Na powyższym wykresie warto zwrócić uwagę, na zależność kąta nachylenia zmian wykresów prądu względem odległości transoptora od powierzchni (d):
Transoptor odbiciowy CNY70. |
Omawialiśmy już to na przykładzie innego z wykresów, ale ten powyżej ładnie pokazuje, że:
Im mniejsza jest odległość transoptora od obserwowanej powierzchni, tym bardziej strome są zmiany zbocza sygnału wyjściowego.
Oddalanie i przybliżanie się powierzchni
Możemy także spotkać się z sytuacją, gdy powierzchnia zamiast przesuwać się przed transoptorem, oddala się od niego i przybliża. W takiej sytuacji powinieneś wrócić do punktu: Zależność prądu kolektora od odległości powierzchni
Sposób ustawienia czujnika
Gdy przyglądniesz się czujnikowi CNY70, to zauważysz, że dioda i fototranzystor nie są umieszczone centralnie, bo to nie jest możliwe :-)
Dlatego też możemy się spodziewać, że w przypadku, gdy krawędź powierzchni (np. zmiana czarnego w biały) będzie na wprost transoptora odbiciowego zachowa się on nieco inaczej w zależności jak jest ustawiony:
Transoptor odbiciowy z tarczą enkodera. |
Dlatego też wrócimy teraz do rysunku pomocniczego na wykresie:
Transoptor odbiciowy CNY70. |
Ten rysunek pokazuje właśnie przypadek, w którym mamy czujnik obrócony o 90° względem swojej osi podłużnej - patrz oznaczenia literami E oraz D. Litery oznaczają oczywiście Emiter i Detektor.
Skoro na wykresie są umieszczone oba przypadki, a wykres jest jeden (nie rozróżnia przypadków), to należy uznać, że niezależnie od sposobu ustawienia transoptora CNY70, będzie on tak samo reagował.
Nie oznacza to, że tak samo będzie w przypadku wszystkich transoptorów. Drugi nasz przedmiot analizy, transoptor KTIR0711S, rozróżnia oba przypadki ustawienia czujnika oraz odpowiadające im numerami (oraz w pionie) wykresy relatywnego prądu kolektora :
Transoptor odbiciowy KTIR0711S. |
Wprawdzie różnice pomiędzy wykresami dla odpowiednich kątów ustawień transoptora są niewielkie, ale warto na to zwracać uwagę, bo inne transoptory mogą mieć inaczej.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}