POLITECHNIKA ŚWIĘTOKRZYSKA WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN |
LABORATORIUM Z AUTOMATYKI |
||||
Nr ćwiczenia : 5 |
Temat ćwiczenia : Wyznaczanie odpowiedzi skokowej członu oscylacyjnego drugiego rzędu . |
||||
Imię i nazwisko : Michał Jarek Mariusz Konopka |
Grupa :
31B |
Ocena : |
Data :
1999 - 11 - 14 |
Podpis : |
|
Cel ćwiczenia.
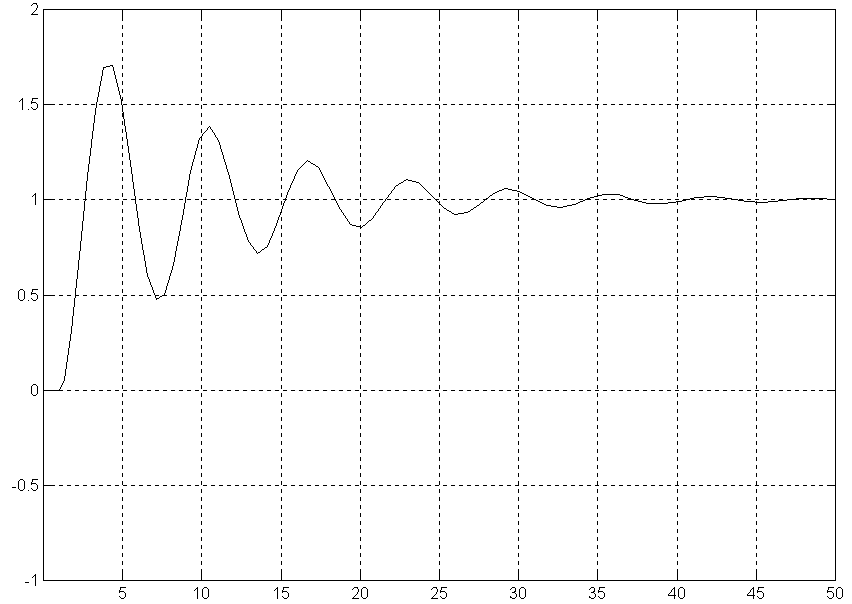
Celem ćwiczenia jest zapoznanie się z programem Matlab oraz wyznaczenie odpowiedzi skokowej członu oscylacyjnego drugiego rzędu.
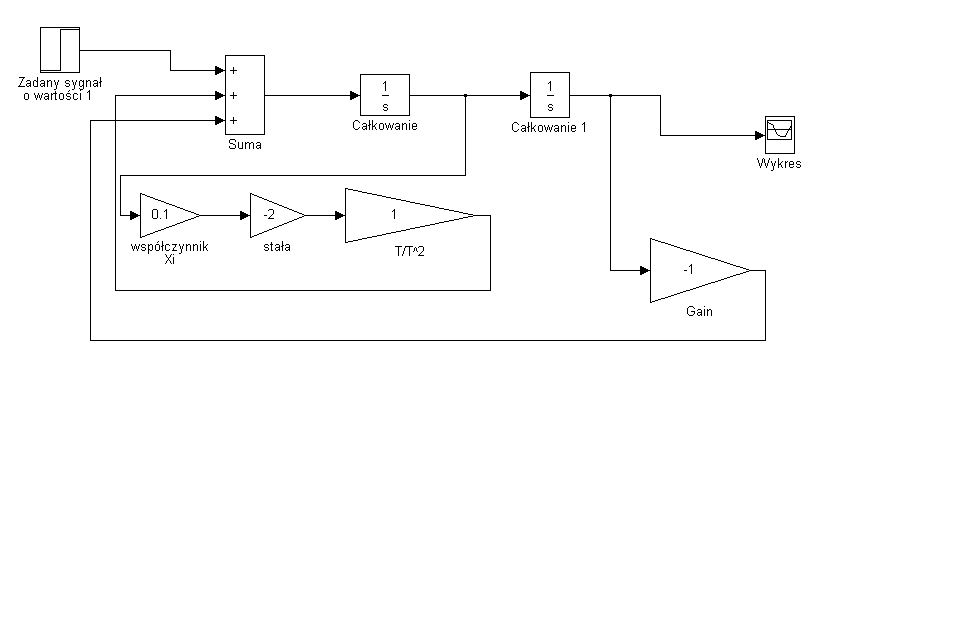
Schematy blokowe, zwane strukturalnymi, przedstawiają wzajemne powiązania pomiędzy poszczególnymi zespołami analizowanego elementu lub układu. Znajomość schematu blokowego ułatwia wyznaczenie opisu matematycznego układu i analizę jego własności.
Pomiar charakterystyki skokowych, jak wszystkie pomiary dynamiczne, przeprowadza się w niewielkim obszarze wokół wybranego punktu pracy.Wybór wartości Δx wymuszenia skokowego lub impulsowego powinien być indywidualnie rozważany, zależnie od stopnia nieliniowości charakterystyki statycznej objektu oraz występujących w czasie pomiaru zakłóceń.Stosowanie wymuszenia skokoweg nie jest możliwe w tych przypadkach gdy powoduje duże odchylenia wielkości wyjściowe, niekorzystne dla badanego procesu technologicznego.Wprowadza się wówczas wymuszenie impulsowe.
Równanie: G(s) = k / (T2*s2) + (2*ξ*T*s) + 1, G(s) = 1 / T*s.
Dane: x = 1, T = 0.1, T1 = 2, k = 1, ξ = 0.1 i 0.5.
Schemat blokowy:
Wykres.
Wyszukiwarka
Podobne podstrony:
sciąga matka, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
W41, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
W2, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
LABORKI NAP HYDR1 , Politechnika, Sprawozdania, projekty, wyklady, Automatyka
LABORKI PNEUM2 , Politechnika, Sprawozdania, projekty, wyklady, Automatyka
Sikora1, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
automatyka12, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
Układy otwarte, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
automatyka3, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
REGULACJA, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
automatyka5, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
W31, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
LAB3LASKI, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
STEROWANIE R CZNE, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
DDSCIAGA, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
sciąga matka, Politechnika, Sprawozdania, projekty, wyklady, Automatyka
ELEKTRA, Politechnika, Sprawozdania, projekty, wyklady, Elektrotechnika
Materiał2, Politechnika, Sprawozdania, projekty, wyklady, Techniki wytwarzania
więcej podobnych podstron