WYKŁAD 10 |
PRZEKSZTAŁCENIE LINIOWE |
WARTOŚCI I WEKTORY WŁASNE ENDOMORFIZMU |
Przykład
Rozpatrzmy przekształcenie płaszczyzny będące jednokładnością, która przekształca kwadrat jednostkowy na kwadrat o bokach [0, 3] i [0, 3]. Przekształcenie to mnoży współrzędne dowolnego wektora ![]()
= [x1, x2], przez liczbę 3 .
Oznaczając jednokładność przez f otrzymujemy ogólny wzór określający to przekształcenie:
f([x1, x2]) = [3 x1, 3x2]
Zauważmy, że jeśli ![]()
=[x1, x2], ![]()
=[y1, y2] i λ1, λ2 są dowolnymi stałymi rzeczywistymi to:
![]()
f([ λ1x1 + λ2 y1, λ1x2 + λ2 y2]) =
= [ 3(λ1x1 + λ2 y1), 3(λ1x2 + λ2 y2)] =
= [3 λ1x1, 3λ1x2] + [ 3λ2 y1, 3λ2 y2] =
= λ1 f([x1, x2]) + λ2 f([y1, y2]) = ![]()
Zdefiniowane przekształcenie ma zatem własność:
![]()
![]()
Podobnie można sprawdzić, że własność ta zachodzi dla
dowolnych ![]()
![]()
Definicja
Przekształcenie f : U → V , gdzie U i V są przestrzeniami liniowymi nazywamy przekształceniem liniowym jeżeli spełniona jest powyższa równość dla dowolnych liczb
![]()
oraz dla dowolnych wektorów ![]()
![]()
![]()
Przekształceniami liniowymi na płaszczyźnie są:
Jednokładność względem punktu (0,0)
Obroty względem punktu (0,0)
Symetria względem punktu (0 ,0)
Symetria względem prostej przechodzącej przez punkt (0,0)
Rzuty na prostą przechodzącą przez punkt (0,0).
Wniosek
Dla dowolnego przekształcenia liniowego zachodzi:
(1) ![]()
tzn. wektor zerowy przestrzeni U
przekształca się na wektor zerowy przestrzeni V,
(2) ![]()
Dla przekształcenia liniowego f wprowadzamy pojęcie
jądra Ker(f) oraz obrazu przekształcenia Im(f) :
![]()
![]()
Okazuje się że:
Ker(f) jest podprzestrzenią wektorową U |
Im(f) jest podprzestrzenią wektorową V |
Związek miedzy wymiarami tych podrzestrzeni wektorowych
jest następujący:
dim(U) = dim(Ker(f)) + dim(Im(f)) |
Dowód podano w dalszej części wykładu.
Możemy też zdefiniować działania na przekształceniach
liniowych :
dodawanie,
odejmowanie,
mnożenie przez liczbę
składanie
odwracanie,
podobnie jak robiliśmy to dla funkcji jednej zmiennej.
Działania na przekształceniach liniowych definują nowe przeksztalcenia liniowe.
Definicja
Jeśli f1, f2 : U → V są przekształceniami liniowymi,
to ich suma jest zdefiniowana następująco:
![]()
Definicja
Jeśli f : U → V jest przekształceniem liniowym, a λ
liczbą rzeczywistą to iloczyn przekształcenia przez liczbę
jest zdefiniowane następująco:
![]()
Definicja
Jeśli f1 : U → V i f2 : V →W są przekształceniami liniowymi, to ich złożenie jest zdefiniowane jako:
![]()
Definicja
Jeśli f : U → V jest przekształceniem liniowym, to przekształceniem odwrotnym nazywamy przekształcenie
![]()
mające własność ![]()
Warunkiem istnienia przekształcenia odwrotnego jest
różnowartościowość przekształcenia f ( Ker(f)={0} )
odwzorowywanie U na V ( dim Im(f)=dim (V) )
Postać macierzowa przekształcenia liniowego f: U → V
Zauważmy, że w omówionym przykładzie obraz f([x1, x2]) dowolnego wektora [x1, x2] można zapisać w postaci macierzowej jako:
Przedstawimy teraz ogólną metodę znajdowania obrazu wektorów w przekształceniu liniowym. W pierwszym kroku określamy w jaki sposób transformują się wektory bazowe. Będzie to podstawa to określenia przekształceń dowolnego wektora z danej przestrzeni.
Niech baza B przestrzeni liniowej U składa się z wektorów:
![]()
Określamy przekształcenia wektorów bazowych jako:
![]()
Dowolny wektor ![]()
wyrażamy za pomocą wektorów bazowych.
![]()
.
Co możemy krótko zapisać ![]()
Niech V będzie przestrzenią m - wymiarową z bazą ![]()
i oznaczymy przez wij j- tą współrzędną wektora ![]()
, gdzie j∈[1, m].
Wówczas:
![]()
Ostatnie wyrażenie można zapisać jako
![]()
gdzie ![]()
oznacza macierz złożoną
z wektorów kolumnowych ![]()
a ![]()
jest wektorem kolumnowym.
Definicja
Macierz Af postaci Af = ![]()
nazywamy
macierzą przekształcenia f.
Konstrukcja macierzy przekształcenia liniowego f:
Krok-1. Znaleźć obrazy wektorów ![]()
![]()
Krok-3 Znaleźć współrzędne wektorów ![]()
w bazie przestrzeni V : ![]()
Krok 2. Utworzyć macierz ![]()
przez wpisanie jako jej kolejnych
kolumn współrzędnych wektorów ![]()
tj.
![]()
Wtedy dla wektora
oraz wektora
|
zachodzi związek
|
Przekształcenie liniowe jest jednoznacznie wyznaczone przez podanie macierzy przekształcenia liniowego dla ustalonych baz przestrzeni U i V. Okazuje się poza tym, że własności przekształceń liniowych można interpretować w terminach macierzy tego przekształcenia.
Jeżeli w przestrzeni U następuje zmiana bazy ![]()
opisana przez macierz P a w przestrzeni V następuje zmiana bazy ![]()
opisana przez macierz Q to macierz przekształcenia liniowego w nowych bazach ma postać:
|
Przykład - macierz obrotu
Przekształcenie, w którym znajdujemy obraz punktu powstały w wyniku jego obrotu o kąt α, jest opisane wzorem:
Zatem, macierz obrotu o kąt α ma postać:
Zauważmy, że det Af =1, zatem rząd Af = 2. Wynika to z tego, że obrazem przestrzeni R2 jest przy obrocie jest cała przestrzeń R2.
Uwaga
Jeżeli f jest przekształceniem liniowym określonym na wektorach w ![]()
o wartościach będących wektorami z ![]()
, to macierz ![]()
jest wymiaru m x n.
Przykład
Niech f1 będzie jednokładnością postaci f1([ x1, x2]) = [ 3x1, 4x2], a f2 obrotem o kąt α na płaszczyźnie.
Czemu odpowiada złożenie przekształceń f1° f2 ?
Okazuje się, że macierz Af2° f1 jest iloczynem macierzy Af2 i Af1 zatem:

Podstawowe własności macierzy przekształcenia liniowego
Niech: rząd Af = r
Wiemy, że metoda eliminacji pozwala na doprowadzenie macierzy Af do postaci:

Elementarne operacje wierszowe nie zmieniają wartości wyznaczników, więc zachowują liniową niezależność wektorów
Obliczamy wartość: ![]()
gdzie jako wektor ![]()
przyjmujemy kolejno:
![]()
Stąd
![]()
,
![]()
................................
![]()
[ 0, 0, ..., 0] - (m - r) wierszy.
Każdy wektor![]()
jest kombinacją liniową wektorów
![]()
Twierdzenie: rząd |
Algorytm dla bazy w Im(f).
Krok 1. Wykonaj operacje wierszowe metody eliminacji na Af.
Zapisz współczynniki główne a1, a2, ..., ar.
Utwórz wektory ![]()
Krok 2. Utwórz macierz ![]()
Wykonaj w B operacje wierszowe odwrotne do operacji w Kroku 1. i w odwrotnej kolejności.
Zapisz otrzymaną macierz C.
Wynik: Kolumny macierzy C tworzą bazę w Im(f).
Twierdzenie
Jeśli dim U = n to wówczas :
|
|
|
|
Klasyfikacja przekształceń liniowych
Przekształcenie liniowe homomorfizmem i oznaczamy przez Hom(U,V)
|
Przekształcenie liniowe endomorfizmem i oznaczamy przez End(V)= Hom(V,V)
|
Przekształcenie liniowe nazywamy izomorfizmem i oznaczamy przez Izo(U,V)
|
Izomorfizm przekształcający automorfizmem i oznaczamy przez Aut(V)=Izo(V,V)
|
Wartości własne i wektory własne endomorfizmu End(V)
|
Definicja
Endomorfizmem liniowym przestrzeni V nazywamy przekształcenie liniowe ![]()
.
Uwaga
Macierz endomorfizmu jest macierzą kwadratową.
Definicja
Niech V będzie przestrzenią liniową, wówczas:
Wektor ![]()
nazywamy wektorem własnym endomorfizmu L, jeśli istnieje λ ∈ R(C) takie, że
![]()
Liczbę λ nazywamy wartością własną endomorfizmu L.
Wektor własny endomorfizmu (

) =
wektor własny macierzy przekształcenia.
Wartość własna endomorfizmu (

) = wartość własna macierzy przekształcenia.
Przykład 1
![]()
![]()
Wówczas: f((1, 1, 1)) = (5, 5, 5) = 5(1, 1, 1)
Wartość własna: 5
Wektor własny: (1, 1, 1)
Przykład 2
Niech ![]()
będzie jednokładnością o skali λ, tzn.
![]()
Wówczas każdy wektor ![]()
jest wektorem własnym
tego przekształcenia o wartości własnej λ.
Przykład 3
Niech ![]()
będzie obrotem o kąt ![]()
, czyli
![]()
To przekształcenie nie ma żadnych wartości własnych,
tzn. żaden wektor nie przechodzi na swoją wielokrotność.
Przestrzeń wektorów własnych |
1. Zbiór ![]()
przy ustalonym λ
jest podprzestrzenią liniową V
2. ![]()
jest podprzestrzenią niezmienniczą przekształcenia L
tzn. ![]()
3. ![]()
4. ![]()
(![]()
- krotność wartości własnej λ)
5. ![]()
Baza wektorów własnych |
jeżeli przekształcenie liniowe L ma n różnych wartości własnych to odpowiadające im wektory własne są liniowo niezależne oraz tworzą bazę przestrzeni V
jeżeli przekształcenie L ma r różnych wartości własnych
![]()
a wymiary odpowiadających im
przestrzeni wektorów własnych ![]()
spełniają związek:
![]()
to istnieje baza przestrzeni V złożona z wektorów
własnych przekształcenia liniowego L
jeżeli wektory własne
![]()
przekształcenia liniowego L tworzą bazę przestrzeni V to
macierz przekształcenia w tej bazie ma postać diagonalną
gdzie na przekątnej stoją wartości własne ![]()
Diagonalizowalność macierzy A(nxn) (rzeczywistej lub zespolonej) |
Następujące warunki są równoważne:
macierz A jest diagonalizowalna
wektory własne A tworzą bazę przestrzeni

postać diagonalna D macierzy A dana jest wzorem:
![]()
gdzie P jest macierza przejścia z bazy kanonicznej do bazy
wektorów własnych
(wektory własne są kolumnami macierzy P)
Uwaga: Dla rzeczywistej macierzy symetrycznej :
wszystkie wartości własne są rzeczywiste
wektory własne tworzą bazę
Znajdowanie wartości i wektorów własnych |
Wartość ![]()
jest wartością własną przekształcenia liniowego L
macierzy A wtedy i tylko wtedy gdy zachodzi:
det(A-λI)=0
Wektor ![]()
jest wektorem własnym L
odpowiadającym wartości własnej ![]()
wttw gdy zachodzi:
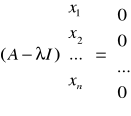
PROBLEM
Znaleźć niezerowy wektor![]()
, którego obraz ![]()
jest jego
liniową wielokrotnością λ.
Mamy więc rozwiązać równanie macierzowe:
AX = λX
czyli:
![]()
lub ![]()
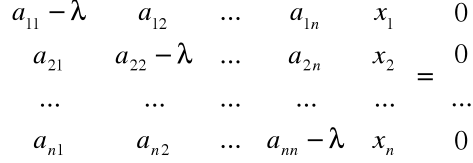
Niezerowe rozwiązanie równania ![]()
, istnieje wtedy i tylko wtedy, gdy macierz ![]()
jest nieosobliwa, czyli gdy jej wyznacznik jest równy 0.
Definicja
Równanie: 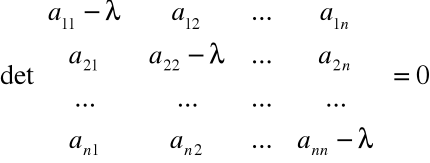
nazywamy równaniem charakterystycznym macierzy A, a wielomian det (A - λI) wielomianem charakterystycznym.
Twierdzenie
Pierwiastki równania charakterystycznego są wartościami własnymi macierzy A.
Przykład 1
Znaleźć wartości i wektory własne przekształcenia f o macierzy
Z równania charakterystycznego :

Wartości własne macierzy: λ1=2, λ2=8.
Znajdowanie wektorów własnych odpowiadających wartościom własnym:
dla każdej wartości własnej rozwiązujemy równanie
![]()
Dla λ1=2 otrzymujemy:
, czyli 
Rozwiązując układ równań: 
otrzymujemy na przykład wektor: 
Wszystkie wektory postaci λX1 są wektorami własnymi. Wybieramy reprezentanta spośród wektorów własnych.
Dla λ1=8 otrzymujemy układ:
co daje np. wektor:
.
W powyższym przykładzie wektory własne stanowiły bazę przestrzeni V. Zachodzi to m.in. w przypadku gdy dim V=n a przekształcenie liniowe ma n różnych wartości własnych.
W przypadku gdy wektorów własnych liniowo niezależnych jest za mało to można je uzupełnić do pełnej bazy tzw. wektorami dołączonymi.
Procedura taka opisana jest w poniższych przykładach.
Rozpatrzmy teraz przykład przekształcenia dla którego wektory własne nie stanowią bazy w przestrzeni V.
Przykład 2
Znaleźć wartości i wektory własne przekształcenia f o macierzy
oraz bazę przestrzeni w oparciu o wektory własne.
Z równania charakterystycznego

otrzymujemy jedną podwójną wartość własną tej macierzy:
λ1=λ2=2.
Znajdujemy wektory własne odpowiadające tej wartości własnej:
Aby znaleźć pierwszy wektor własny rozwiązujemy równanie (A-λI)X1=0
Czyli dla λ1 = λ2 = 2:
, stąd 
Rozwiązując układ równań: 
otrzymujemy np. wektor 
.
Pozostałe wektory własne będą liniowo zależne od tego wektora, zatem wektory własne nie będą stanowiły bazy.
W tym przypadku wektory własne można uzupełnić do bazy .
Ponieważ krotność wartości własnej równa jest 2
to drugi wektor bazy znajdujemy rozwiązując równanie:
(A-λI)X2=X1
Czyli musimy rozwiązać równanie:
,
stąd: 
Rozwiązując układ równań: 
otrzymujemy na przykład wektor bazy nie będący wektorem własnym: 
.
Teraz wektory X1 i X2 stanowią bazę przestrzeni V,
ale tylko X1 jest wektorem własnym.
W tej bazie macierz przekształcenia liniowego ma postać:
Przykład 3
Znaleźć wartości i wektory własne przekształcenia f o macierzy
oraz bazę przestrzeni w oparciu o wektory własne.
Z równania charakterystycznego
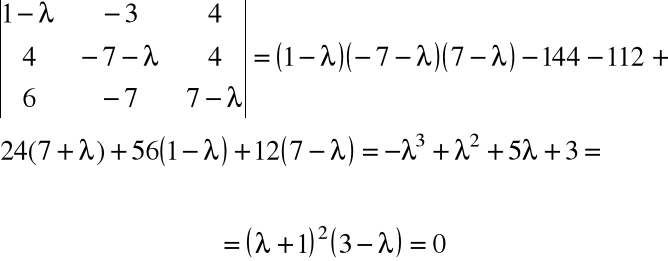
Wartość własna podwójna: λ1=λ2= -1 oraz pojedyncza: λ3= 3
Znajdujemy wektory własne odpowiadające wartości własnej λ1=λ2= -1:
stąd: 
Po eliminacji: 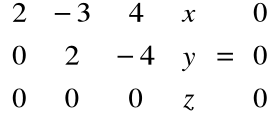
Rozwiązując układ równań:
otrzymujemy wektor własny: 
Pozostałe wektory własne są liniowo zależne od tego wektora.
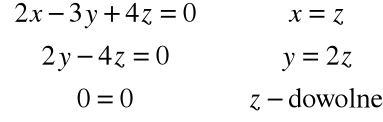
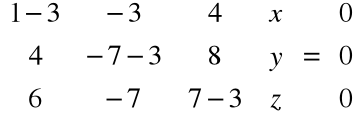
Ponieważ krotność tej wartości własnej wynosi 2 to brakujący drugi wektor bazy uzupełniamy przez rozwiązanie równania:
(A-λI)X2=X1
Teraz zatem musimy rozwiązać równanie:
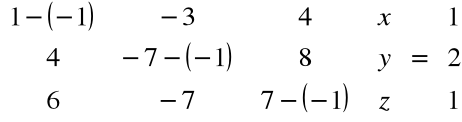
stąd: 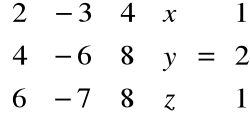
Po eliminacji: 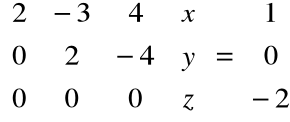
Rozwiązując układ równań: 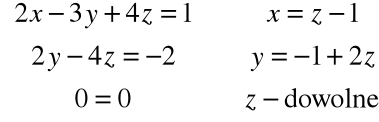
otrzymujemy drugi wektor bazy nie będący wektorem własnym:

Pozostało jeszcze znaleźć wektory własne odpowiadające wartości własnej λ3=3:
Stąd: 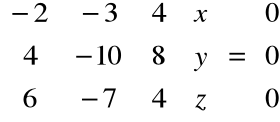
Po eliminacji: 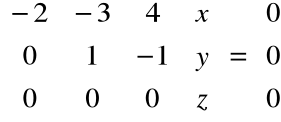
Rozwiązując układ równań: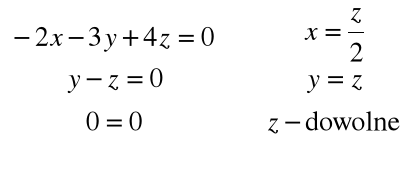
otrzymujemy wektor własny: 
Pozostałe wektory własne dla tej wartości własnej bedą liniowo zależne od tego wektora.
Zatem wektory X1, X2, X3 stanowią bazę przestrzeni ale tylko dwa z nich a mianowicie X1 i X3 są wektorami własnymi przekształcenia.
Macierz przekształcenia w tej bazie ma postać:
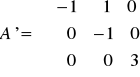
Przykład 4
Niech f: R2 → R2 będzie obrotem o kąt π/2, czyli przekształceniem liniowym o macierzy:
Z równania charakterystycznego:
nie otrzymujemy pierwiastków rzeczywistych, a zatem:
obrót nie ma wektorów własnych na płaszczyźnie.
Twierdzenie
Niech f: V → V jest przekształceniem liniowym t.że dim V=n .
Jeśli wartości własne f są różne, to odpowiadające im wektory własne są liniowo niezależne.
Jeżeli różnych wartości własnych jest n
to wektory własne tworzą bazę przestrzeni V.
Macierz przekształcenia f w bazie wektorów własnych
ma postać diagonalną:
gdzie λi są wartościami własnymi.
Definicja
Macierze A i B wymiaru nxn są podobne gdy
A=P![]()
BP
dla pewnej macierzy odwracalnej P.
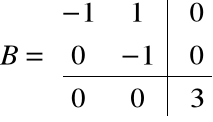
Zadanie kontrolne:
Sprawdź czy macierz B=
jest diagonalizowalna.
Diagonalizowalność macierzy A oznacza zatem jej podobieństwo do macierzy diagonalnej. Z przykładu wynika,
że macierz nie jest diagonalizowalna jeśli jej wartości własnej o pewnej krotności k nie odpowiada k niezależnych wektorów własnych.
Okazuje się, że w sytuacji gdy macierz A nie jest podobna do macierzy diagonalnej, to jest podobna do macierzy bliskiej macierzy diagonalnej, tzw. macierzy blokowej Jordana.
Definicja
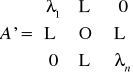
Macierz kwadratowa, górnotrójkątna A jest macierzą blokową Jordana, jeśli:
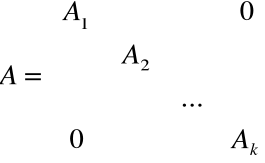
gdzie każda z macierzy Ak jest kwadratowa i ma postać:
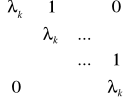
Macierze Ak nazywamy klatkami Jordana macierzy A.
Uwaga
Liczby λk występujące w macierzy Jordana są jej wartościami własnymi. Najmniejsza możliwa klatka Jordana jest macierzą 1x1, składającą się tylko z jednej wartości własnej.
Twierdzenie
Niech A będzie macierzą wymiaru nxn.
Wówczas A jest podobna do macierzy Jordana.
Twierdzenie
Niech A będzie macierzą kwadratową.
Niech B będzie macierzą blokową Jordana podobną do A.
Niech λ∈K będzie wartością własną macierzy A.
Niech a0 = n, am=R[(A-λI)m] dla m=1,2...n
Wówczas:
(am-1 - am ) ≥ 0
(am-1 - am) jest liczbą klatek Jordana
wymiaru większego bądź równego m w macierzy B,
zawierających wartość własną λ.
Znajdowanie macierzy Jordana dla macierzy A
Przykład 1
Znaleźć macierz Jordana dla macierzy 
.
Ponieważ wartości własne były pojedyncze (λ1=2, λ2=8),
macierz Jordana możemy zapisać natychmiast:
Przykład 2
Znaleźć macierz Jordana dla macierzy 
.
Wartość własna macierzy: λ1=λ2= 2.
Zatem obliczamy:
a0 = 2 - wymiar macierzy,
a1=1 - rząd macierzy![]()
= 
.
Stąd: a0 - a1 =1
Liczba klatek rozmiaru większego bądź równego 1 wynosi 1, czyli klatka musi mieć wymiar 2x2 i macierz Jordana jest postaci:
.
Przykład 3
Znaleźć macierz Jordana dla macierzy 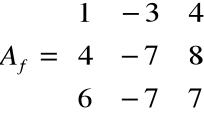
.
Wartość własna macierzy: λ1=λ2= -1
Zatem obliczamy:
a0=3 - wymiar macierzy
a1=2 - rząd macierzy![]()
= 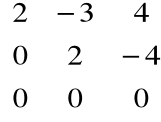
Stąd: a0 - a1 =1
Liczba klatek wymiaru większego bądź równego 1 odpowiadających wartości własnej -1 wynosi 1,
czyli musi to być klatka 2x2.
Zatem macierz Jordana jest postaci:
.
Algebra Liniowa z Geometrią
28
Wyszukiwarka
Podobne podstrony:
Wyklad-10-wd, różne, Algebra semestr 1
Wyklad-01-wd-n, różne, Algebra semestr 1
Wyklad-03a-wd, różne, Algebra semestr 1
Wyklad-02-wd, różne, Algebra semestr 1
wyklad-09-wd, różne, Algebra semestr 1
wyklad-08-wd, różne, Algebra semestr 1
Wyklad-04-wd , różne, Algebra semestr 1
Wyklad-06-07-wd, różne, Algebra semestr 1
2008 09 KOL1, różne, Algebra semestr 1
liczby zesp.-2, różne, Algebra semestr 1
liczby zesp.-3, różne, Algebra semestr 1
liczby rzecz., różne, Algebra semestr 1
Wykład 10, FIR UE Katowice, SEMESTR IV, Finanse przedsiębiorstw, fp, Finanse przedsiębiostwa - wszys
przyklad-kol-I, różne, Algebra semestr 1
Wyklad 9-10, Studia Mgr, II semestr mgr, Mechanistyczne metody wymiarowania nawierzchni
2008 09 KOL1, różne, Algebra semestr 1
ogólne - wykład 10, III ROK, I semestr, Językoznawstwo ogólne - wykład
więcej podobnych podstron