|
POLITECHNIKA WROCŁAWSKA
|
Skład grupy:
Łukasz Kopeć (177127) Michał Dancewicz (177170) Tomasz Sidełko (177181)
|
Wydział: Elektryczny Termin: Czwartek 09:15-10:45 Semestr letni 10/11 Grupa 1 |
|
Data ćwiczenia: 03.03.2011 |
Laboratorium Podstaw Automatyki
|
|||
Nr ćwiczenia: 1
|
Temat: Metody analizy ciągłych liniowych URA |
Ocena:
|
||
Celem ćwiczenia jest doświadczalna analiza elementów oraz otwartych i zamkniętych układów regulacji automatycznej.
Układy inercyjne I-rzędu
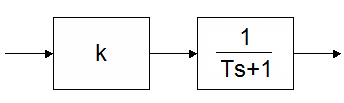
Rys. Schemat układu I-rzędu
Wyznaczamy parametry k oraz T dwoma metodami:
1a. poprzez badanie odpowiedzi na skok jednostkowy
Wartości nastawione: 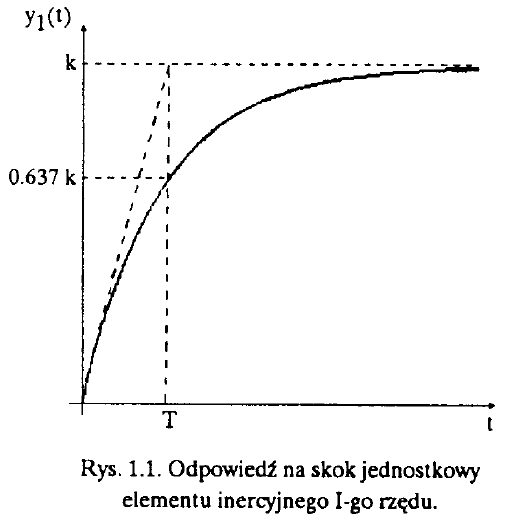
K=1, f=16,00Hz, T=5ms
![]()
![]()
-wartość skoku jednostkowego
![]()
![]()
![]()
Parametr określający szybkość zmian odpowiedzi układu, czyli stałą czasową T wyznaczamy z wykresu:
Rys. 1.3 zdjęcie przedstawiające przebieg badanego sygnału z zaznaczeniem wartości ustalonej
![]()
5,4ms
Tak więc stała czasowa wyznaczona z wykresu jest porównywalnie taka sama jak stała czasowa nastawiona na modelu w badanym układzie.
1b. poprzez wyznaczenie charakterystyki amplitudowo-fazowej
Wartości nastawione: K=0.5, T=5ms
Na wejście układu podajemy sygnał sinus, poczynając od częstotliwości kilkanaście Hz w górę tak, aby argument nie przekroczył 800. Wyznaczamy szukane parametry:
Lp. |
Uwe [mV] |
Uwy [mV] |
t1 [ms] |
f [Hz] |
|G(j |
arg{G(j [o] |
1. |
500 |
210 |
4,45 |
16,22 |
0,42 |
-25,98 |
2. |
500 |
200 |
4,20 |
19,63 |
0,40 |
-29,68 |
3. |
500 |
160 |
3,78 |
32,54 |
0,32 |
-44,28 |
4. |
500 |
125 |
3,24 |
50,00 |
0,25 |
-58,32 |
5. |
500 |
85 |
2,34 |
81,9 |
0,17 |
|
6. |
500 |
60 |
1,76 |
122,7 |
0,12 |
-77,74 |
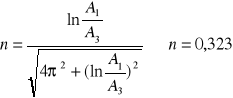
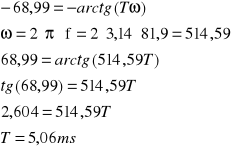
Ze wzoru ![]()
wyznaczamy stałą czasową T.
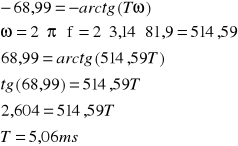
Przykładowo:
Wartość średnia z wyznaczonych stałych czasowych wynosi również 5,06ms, tak więc pomiar jest najdokładniejszy przy częstotliwościach zbliżonych 80Hz.
Na podstawie pomiarów wykreśliliśmy charakterystykę amplitudowo-fazową:
Na podstawie obliczeń oraz wykresu:
k=0.47
Wartość wzmocnienia obliczonego jest zbliżona do wartości nastawionej i wynosi ![]()
Układy inercyjne II-rzędu
Wartości nastawione: K=2, T=1ms, f=150Hz
Rys. Schemat układu II-rzędu
Wyznaczamy parametry k, T1, T2 :
2. poprzez badanie odpowiedzi na skok jednostkowy
![]()
![]()
-wartość skoku jednostkowego
![]()

Rys.1.4 Zdjęcie przedstawiające odpowiedź układu II-rzędu
Z wykresu odczytujemy wartości:
Stałą czasową T wyznaczamy ze wzorów:
![]()
![]()
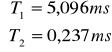
Porównując współczynniki przy poszczególnych potęgach s, w obydwu równaniach na wartości G(s), obliczamy wartości T1, T2:
![]()
![]()

Wnioski:
Celem ćwiczenia była doświadczalna analiza elementów oraz otwartych i zamkniętych układów regulacji automatycznej. Szczególnie uwzględnialiśmy ich odpowiedź na skok jednostkowy. Przy badaniu pierwszego z badanych elementów sprawdziliśmy odpowiedź na skok jednostkowy, przy sygnale prostokątnym. Na ekranie oscyloskopu otrzymaliśmy przebieg wskazujący, iż badany układ był układem inercyjnym I-rzędu. Na podstawie otrzymanej odpowiedzi wyznaczyliśmy współczynnik wzmocnienia k, który wynosił 0,899 oraz stałą czasową, która wynosiła 5,4ms. Odbiega ona w pewnym stopniu od stałej czasowej nastawionej na elementach układu. Spowodowane jest to tym, że jej wyznaczenie sprowadza się do poprowadzenia kilku linii zaznaczonych na rys. 1.3. i odczytania wartości z wykresu. Linią tą jest styczna do charakterystyki. Nie byliśmy w stanie jej idealnie wyznaczyć.
Badając odpowiedź badanego układu na sygnał sinusoidalny, w zakresie częstotliwości (16-123)Hz, wyznaczyliśmy parametry potrzebne do wykreślenia charakterystyki amplitudowo-fazowej. Obliczyliśmy też ze wzoru stałą czasową, która wynosiła w tych pomiarach T=5,06ms oraz wzmocnienie, którego wartość była przybliżona do nastawionej i wynosiła k=0,5.
Po podłączeniu układu inercjalnego II-rzędu i podaniu na wejście sygnału prostokątnego, otrzymaliśmy przebieg o charakterze oscylacyjnym (rys.1.4) . W oparciu o pomiary oscyloskopowe wyznaczyliśmy parametry przebiegu sygnału potrzebne do wyznaczenia szukanych wartości k,T1,T2. Wartości te zgadzają się z pożądanymi wartościami podanymi w instrukcji ćwiczenia i odbiegają nieznacznie od wartości nastawionych na elementach tego układu. . Nastawiona stała czasowa T1 wynosiła 5ms, natomiast wyliczona 5,096ms, nastawiona stała czasowa T2 wynosiła 0,237ms, natomiast wyliczona 0,237ms. Różnice te są nieznaczące więc pomiary zostały wykonane poprawnie.
![]()
![]()
Wyszukiwarka
Podobne podstrony:
Automatyka SPRAWKO nandy, Automatyka i robotyka air pwr, IV SEMESTR, Podstawy automatyki 2, laborki
nandy, Automatyka i robotyka air pwr, IV SEMESTR, Podstawy automatyki 2, laborki
pytanka na ustny, Automatyka i robotyka air pwr, IV SEMESTR, Podstawy automatyki 2, egzamin
pH sprawko, Automatyka i robotyka air pwr, IV SEMESTR, pomiary przemysłowe, pH
MatLab ROZWIĄZANA lista na koło, Automatyka i robotyka air pwr, IV SEMESTR, MATLAB, Matlab zagadnien
statystyka ściąga, Automatyka i robotyka air pwr, IV SEMESTR, statystyka stosowana
2x, Automatyka i robotyka air pwr, IV SEMESTR, MATLAB, Matlab zagadnienia
rozwiązaniaaa, Automatyka i robotyka air pwr, IV SEMESTR, MATLAB, Matlab zagadnienia
MATLAB ŚCIĄGA, Automatyka i robotyka air pwr, IV SEMESTR, MATLAB, Matlab zagadnienia
sprawozdanie na elektre 1, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
T5PEL, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
T4PEL, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
kolo elektronika, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
0 sciaga materialoznawstwo opracowanie tematow spis, Automatyka i robotyka air pwr, III SEMESTR, P
T2PEL, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
T3PEL, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
T8PEL, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
więcej podobnych podstron