LABORATORIUM NAPĘDU I AUTOMATYKI |
||||
Imię i nazwisko:
|
Grupa:
|
Zespół:
|
Rok akademicki:
|
Data wykonania:
|
Temat: Regulacja prędkości kątowej silnika asynchronicznego pierścieniowego zasilanego z tyrystorowego sterownika mocy. |
||||
Schemat pomiarowy
Dane znamionowe:
Silnik: Prądnica prądu stałego:
U1=220/380V U=230V
Uz=116V I=19,6A
I1=9,8/5,7A Iwz=0,92A
Iz=13A P=4,5kW
P=2,2kW
cosϕ=0,71
Prądnica tachometryczna:
cn = 100 V =1000 obr /min
Badanie zespołu napędowego w układzie otwartym
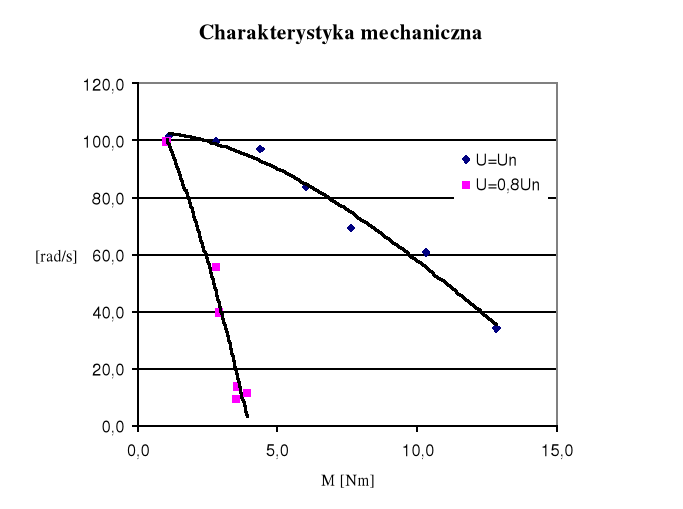
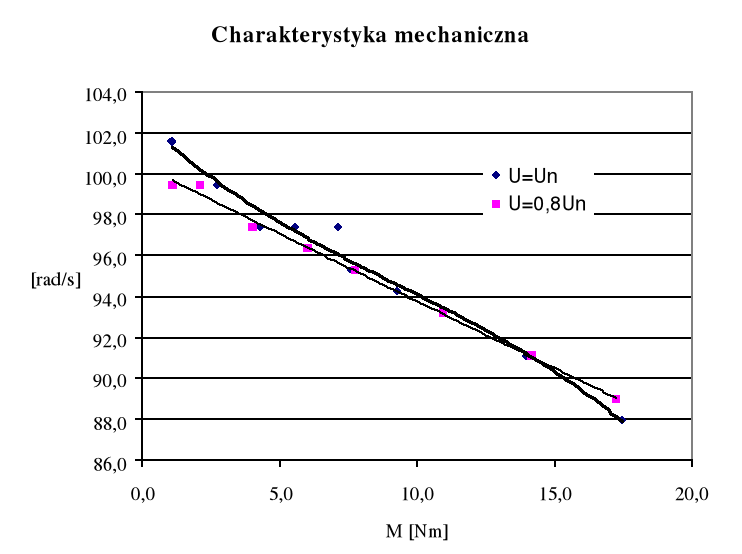
Wyznaczanie charakterystyk mechanicznych
a) Tabela pomiarowa
Lp. |
I1 |
I2 |
I3 |
I |
U1 |
U2 |
U3 |
U |
P |
UH |
ItH |
Uω |
ω |
M |
ΔPobc |
Pw |
PH |
η |
λp |
|
|
A |
A |
A |
A |
V |
V |
V |
V |
kW |
V |
A |
V |
Rad/s |
Nm |
W |
W |
W |
- |
- |
|
U=Un |
||||||||||||||||||||
1 |
3,7 |
3,8 |
3,7 |
3,65 |
395 |
395 |
395 |
381 |
0,33 |
168,4 |
0 |
97 |
101,6 |
1,1 |
- |
110,0 |
0 |
0,33 |
0,14 |
|
2 |
3,2 |
3,6 |
3,4 |
3,4 |
380 |
380 |
380 |
366 |
0,4 |
168 |
1 |
95 |
99,5 |
2,8 |
1,6 |
277,6 |
168 |
0,69 |
0,19 |
|
3 |
3,1 |
3,3 |
3,2 |
3,2 |
340 |
340 |
340 |
336 |
0,51 |
160 |
2 |
92,5 |
96,9 |
4,4 |
5,6 |
423,6 |
320 |
0,83 |
0,27 |
|
4 |
2,95 |
3,4 |
3,3 |
3,3 |
240 |
240 |
240 |
246 |
0,55 |
136 |
3 |
80 |
83,8 |
6,0 |
10,9 |
501,9 |
408 |
0,91 |
0,39 |
|
5 |
3,6 |
4,2 |
4,1 |
4,15 |
220 |
220 |
220 |
240 |
0,65 |
112 |
4 |
66 |
69,1 |
7,6 |
17,9 |
527,9 |
448 |
0,81 |
0,38 |
|
6 |
4,2 |
4,4 |
4,6 |
4,7 |
210 |
210 |
210 |
240 |
0,69 |
96 |
5,6 |
58 |
60,7 |
10,3 |
32,0 |
625,6 |
537,6 |
0,91 |
0,35 |
|
7 |
5,8 |
6,4 |
6,3 |
6,5 |
210 |
210 |
210 |
249 |
0,83 |
52 |
7 |
32,5 |
34,0 |
12,8 |
45,6 |
436,6 |
364 |
0,53 |
0,30 |
|
U= 0,8Un |
||||||||||||||||||||
1 |
2,5 |
2,8 |
2,7 |
2,65 |
310 |
310 |
310 |
304 |
0,2 |
168 |
0 |
95 |
99,5 |
1,0 |
- |
101,0 |
0 |
0,51 |
0,14 |
|
2 |
2,6 |
3,2 |
3,1 |
3,05 |
136 |
136 |
136 |
177 |
0,22 |
94 |
1,1 |
53 |
55,5 |
2,8 |
1,9 |
154,3 |
103,4 |
0,70 |
0,24 |
|
3 |
3 |
3,6 |
3,5 |
3,55 |
140 |
140 |
140 |
183 |
0,22 |
64 |
1,3 |
38 |
39,8 |
2,9 |
2,6 |
115,8 |
83,2 |
0,53 |
0,20 |
|
4 |
3,7 |
4,2 |
4,1 |
4,15 |
142 |
142 |
142 |
194 |
0,25 |
22 |
1,5 |
13 |
13,6 |
3,5 |
3,3 |
48,3 |
33 |
0,19 |
0,18 |
|
5 |
3,9 |
4,3 |
4,2 |
4,2 |
143 |
143 |
143 |
192 |
0,25 |
20 |
1,6 |
11 |
11,5 |
3,9 |
3,7 |
44,7 |
32 |
0,18 |
0,18 |
|
6 |
3,8 |
4,3 |
4,3 |
4,25 |
143 |
143 |
143 |
192 |
0,25 |
14 |
1,6 |
9 |
9,4 |
3,5 |
3,7 |
33,1 |
22,4 |
0,13 |
0,18 |
|
b) przykładowe obliczenia
RtH - odczytane z wykresu
ΔP0 - odczytane z wykresu
![]()
c) charakterystyki:
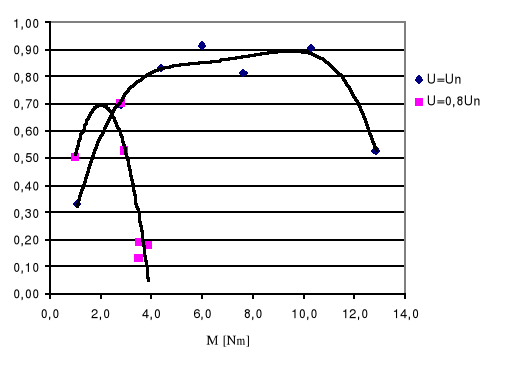
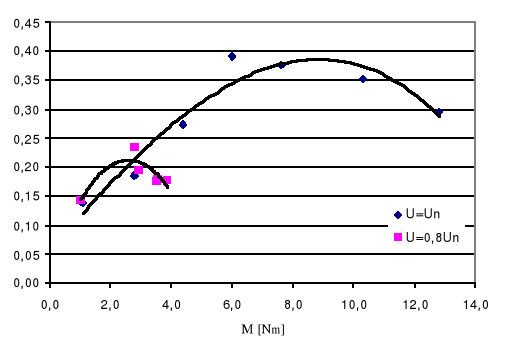
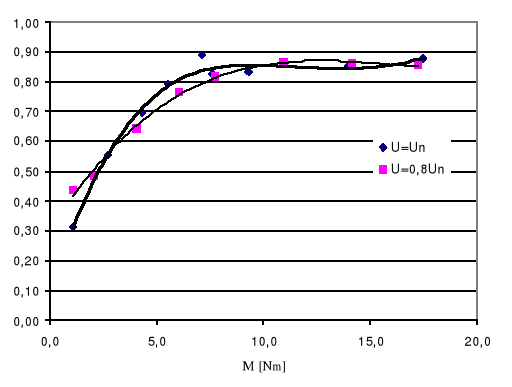
η=f(M)
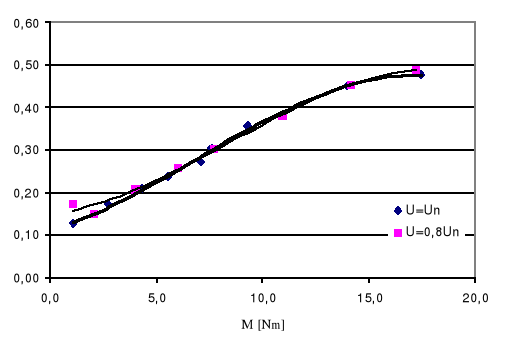
λp=f(M)
Badanie zespołu napędowego w układzie zamkniętym
Wyznaczanie charakterystyk mechanicznych
Tabela pomiarowa
Lp. |
I1 |
I2 |
I3 |
I |
U1 |
U2 |
U3 |
U |
P |
UH |
ItH |
Uω |
ω |
M |
ΔPobc |
Pw |
PH |
η |
λp |
|
A |
A |
A |
A |
V |
V |
V |
V |
kW |
V |
A |
V |
Rad/s |
Nm |
W |
W |
W |
- |
- |
U=Un |
|||||||||||||||||||
1 |
4,2 |
4,3 |
4 |
4 |
400 |
400 |
400 |
399 |
0,35 |
168 |
0 |
97 |
101,6 |
1,1 |
- |
110,0 |
0 |
0,31 |
0,13 |
2 |
4,3 |
4,3 |
4,1 |
4,1 |
400 |
400 |
400 |
402 |
0,49 |
162 |
1 |
95 |
99,5 |
2,7 |
1,6 |
271,6 |
162 |
0,55 |
0,17 |
3 |
4,3 |
4,4 |
4,1 |
4,15 |
400 |
400 |
400 |
399 |
0,6 |
156 |
2 |
93 |
97,4 |
4,3 |
5,6 |
419,6 |
312 |
0,70 |
0,21 |
4 |
4,4 |
4,4 |
4,2 |
4,15 |
400 |
400 |
400 |
399 |
0,68 |
156 |
2,75 |
93 |
97,4 |
5,5 |
9,4 |
540,4 |
429 |
0,79 |
0,24 |
5 |
4,5 |
4 |
4,2 |
4,15 |
400 |
400 |
400 |
399 |
0,78 |
156 |
3,7 |
93 |
97,4 |
7,1 |
15,7 |
694,9 |
577,2 |
0,89 |
0,27 |
6 |
4,5 |
4,5 |
4,3 |
4,18 |
400 |
400 |
400 |
399 |
0,88 |
152 |
4 |
91 |
95,3 |
7,6 |
17,9 |
725,9 |
608 |
0,82 |
0,30 |
7 |
4,6 |
4,6 |
4,4 |
4,25 |
400 |
400 |
400 |
399 |
1,05 |
150 |
5 |
90 |
94,2 |
9,3 |
27,0 |
875,0 |
750 |
0,83 |
0,36 |
8 |
5 |
5 |
4,8 |
4,8 |
400 |
400 |
400 |
399 |
1,49 |
140 |
8 |
87 |
91,1 |
14,0 |
57,6 |
1273,6 |
1120 |
0,85 |
0,45 |
9 |
5,4 |
5,4 |
5,2 |
5,3 |
400 |
400 |
400 |
399 |
1,75 |
136 |
10 |
84 |
88,0 |
17,5 |
85,0 |
1536,0 |
1360 |
0,88 |
0,48 |
U=0,8Un |
|||||||||||||||||||
1 |
2,6 |
2,8 |
2,7 |
2,65 |
320 |
320 |
320 |
318 |
0,25 |
168 |
0 |
95 |
99,5 |
1,1 |
- |
109,0 |
0 |
0,44 |
0,17 |
2 |
4,3 |
4,3 |
4,1 |
4,1 |
400 |
400 |
400 |
402 |
0,43 |
164 |
0,6 |
95 |
99,5 |
2,1 |
0,7 |
208,1 |
98,4 |
0,48 |
0,15 |
3 |
4,4 |
4,4 |
4,2 |
4,2 |
400 |
400 |
400 |
402 |
0,61 |
156 |
1,8 |
93 |
97,4 |
4,0 |
4,6 |
393,4 |
280,8 |
0,64 |
0,21 |
4 |
4,5 |
4,5 |
4,2 |
4,25 |
400 |
400 |
400 |
402 |
0,76 |
156 |
3 |
92 |
96,3 |
6,0 |
10,9 |
580,9 |
468 |
0,76 |
0,26 |
5 |
4,5 |
4,5 |
4,3 |
4,3 |
400 |
400 |
400 |
399 |
0,9 |
154 |
4 |
91 |
95,3 |
7,7 |
17,9 |
735,9 |
616 |
0,82 |
0,30 |
6 |
4,8 |
4,7 |
4,5 |
4,5 |
400 |
400 |
400 |
399 |
1,18 |
148 |
6 |
89 |
93,2 |
11,0 |
35,3 |
1021,3 |
888 |
0,87 |
0,38 |
7 |
5 |
5 |
4,8 |
4,8 |
400 |
400 |
400 |
399 |
1,5 |
142 |
8 |
87 |
91,1 |
14,2 |
57,6 |
1290,6 |
1136 |
0,86 |
0,45 |
8 |
5,4 |
5,4 |
5,1 |
5,3 |
400 |
400 |
400 |
399 |
1,79 |
136 |
10 |
85 |
89,0 |
17,2 |
85,0 |
1533,0 |
1360 |
0,86 |
0,49 |
charakterystyki:
η=f(M)
λp=f(M)
Wnioski:
RS
T
Tyrystorowy
Sterownik
Mocy
A
A
A
V
V
M
GH
PT
Vω
VH
AH
AW
Rw
+
_
RH
Rd
η
λp
η
λp
Wyszukiwarka
Podobne podstrony:
Napęd Przeksz. 7(1), Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 20, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 12, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 28, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 6 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 36(1), Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 24, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 12(1), Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 28(1), Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd Przeksz. 7 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd Przeksz. 6 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 20 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 18 P protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 8, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 1, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 40 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 6, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 27 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
więcej podobnych podstron