δ11 δ1n
D= macierz podatności
δn1 δnn
x1
X= wektor niewiadomych
x2
Δ1p
DF= wektor wyrazów wolnych
Δnp
DX+DF=0
Mhost = Mh1x1 + Mh2x2 + Mh3x3 + Mhp
1.Wyznaczamy stopień statycznej niewyznaczalności
2.Tworzymy układ podstawowy metody sił (układ statycznie wyznaczalny- tworzymy przez usunięcie więzi nadliczbowych
3.Budujemy układ równań metody sił.Wyznaczamy współczynniki układu
4.Rozwiązujemy układ równań (wyznaczamy siły hiperstatyczne xi)
5.Wyznaczamy rzędne ostatecznych wykresów M.,Q,N w punktach charakterystycznych
6.Sprawdzamy rozwiązanie
METODA PRZEMIESZCZEŃ

6. Metoda przemieszczeń
Procedura
*wyznaczenie stopnia kinematycznej (i geometrycznej) niezmienności układu
*UPMP
*układ równań MP (wyznaczamy współczynniki k)
*wyznaczamy Most
*sporządzamy wykres
Stateczność prętów prostych
Istota zjawiska utraty stateczności pręta prostego znana jest z kursu wytrzymałości materiałów.Występuje ono w przypadku działania na pręt siły osiowej S o tzw. wartości krytycznej Skryt.Pręt znajduje się wówczas w stanie równowagi obojętnej; jego oś może pozostawać linią prostą,ale również nieskończenie mała dodatkowa przyczyna może wywołać jej wygięcie.Mówimy,że następuje wtedy wyboczenie pręta.Wartość krytyczną siły ściskającej dla swobodnie podpartego pręta o stałym przekroju poprzecznym wyznacza się na podstawie równania Euler'a:
w” + (SI2/EI)*w = 0

Pwyt = (Π2EI)/(μ*l2) - siła Eulerowska
Jeżeli smukłość rozważanego pręta jest większa od smukłości granicznej,to po osiągnięciu przez siłę S wartości krytycznej pręt ulega sprężystemu wyboczeniu.
Pręt ulegnie wyboczeniu przy dowolnejwartości obciążenia zewnętrznego.
W potocznym języku opór jaki stawia pręt zginany,przyjęto nazywać jego sztywnością.
Pręt rozciągany ma większą sztywność na zginanie niż pręt ściskany.
W przypadku gdy siła ściskająca ma wartość Pkr=Π2EI/(μ) sztywność pręta na zginanie jest równa 0.
Efekt polega na zmianie sztywności pręta na zginanie;ma to duże znaczenie w analizie statycznej złożonych ustrojów prętowych.
Stateczność płaskich ustrojów ramowych
K*Q=P
K-macierz sztywności
Q-wektor przmieszczeń
P-całkowity wektor obciążeń
Jeżeli założymy brak obciążeń wywołujących zginanie,wówczas wektor P=0, [K]=0
r11б1 + r12Δ2 = 0
r21б1 + r22Δ2 = 0

Postacie utraty stateczności
Konstrukcja znajduje się w stanie równowagi statycznej,jeśli po dowolnie małym odchyleniu od położenia pierwotnego konstrukcja wykazuje tendencje do powrotu do tego położenia pierwotnego.Utrata stateczności prowadzi do zniszczenia konstrukcji,gdyż pociąga za sobą duże odkształcenia i to w sposób nagły.
Aby konstrukcja znajdowała się w stanie równowagi statycznej muszą być spełnione warunki:
konstrukcja musi być geometrycznie niezmienna
obciążenie konstrukcji musi być mniejsze od Pkryt, przy którym następuje utrata stateczności
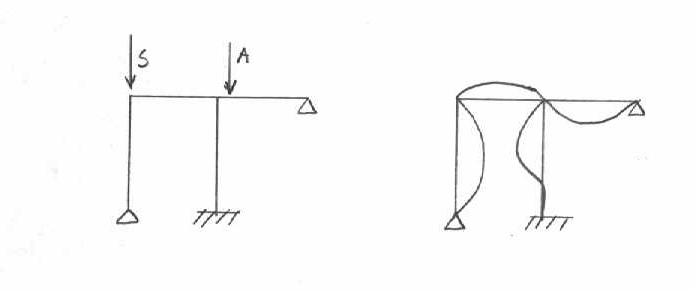
II.Postacie utraty stateczności:
Postać utraty stateczności zależy od przyłożonej siły oraz od geometrii ustroju

III.Metody określania sił krytycznych (zakres liniowo sprężysty)
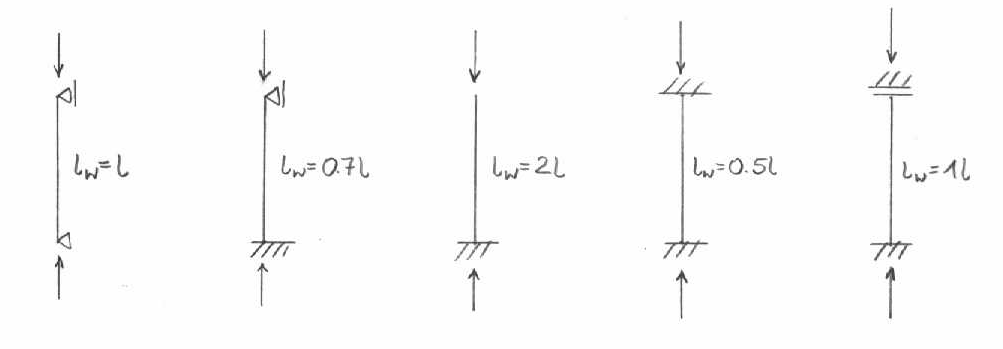
* dla prętów prostych wzór Eulera P=Π2EI/lw2
lw - długość wyboczeniowa
dla płaskich ustrojów ramowych: metoda przemieszczeń
Schemat postępowania:
1.Dobór układu podstawowego MP
2.Układ równań MP
3.Wyznaczenie współczynników- nowe wzory transformacyjne dla prętów obciążonych siłą osiową
Stateczność prętów prostych i płaskich ustrojów ramowych
Stateczność
Pojedynczych prętów Układy złożone
Pręt idealny z imperfekcją idealny z imperfekcją

7. Obciążenia różnych typów; wpływ temperatury, przemieszczenia wymuszonego, uwzględnienie sprężystego podparcia punktowego i ciągłego, wykorzystanie symetrii układu i obciążeń.
I.Typy obciążeń:
statyczne - wartość zwiększa się od zera do wartości końcowej,usuwanie obciążenia na statyczne można związać z największym okresem drgań własnych konstrukcji.Jeżeli czas zmiany obciążenia jest znacznie większy od największego okresu drgań własnych konstrukcji,to można to nazwać statycznym
dynamiczne - wartość zmienia się nagle lub okresowo zmiennie lub w chwili przyłożenia do konstrukcji jest skończona
Zależnie od czasu trwania i sposobu działania:
stałe - wartość,kierunek i położenie pozostają niezmienne w czasie użytkowania budowli,jej montażu i remontu
zmienne - mogą zmieniać wartość,kierunek lub położenie w czasie użytkowania budowli
-w całości długotrwałe- np.parcie wody o stałym poziomie zwierciadła
-w części długotrwałe- np.ciężar pyłu,obciążenie od suwnic
-w całości krótkotrwałe- np.śnieg,wiatr
wyjątkowe - występują w wyniku mało prawdopodobnych zdarzeń w czasie użytkowania budowli (powódz,pożar)
II.Wpływ temperatury
Zmiana temperatury w stosunku do temperatury montażu powoduje wydłużenie pręta w osi lub :zginanie pręta momentami powstałymi na skutek gradientu temperatur.
Siły wewnętrzne powstające pod wpływem tego rodzaju obciążenia można obliczać za pomocą metody przemieszczeń, gdzie zadane przemieszczenie wynosi α*t*l,
α- współczynnik rozszerzalności termicznej
t - temperatura
l - długość pręta
lub metodą sił, w której wpływ temperatury uwzględniony jest przez Δit
δ11x1 + δ12x2 + Δ1t = 0
δ21x1 + δ22x2 + Δ2t = 0
Δit = Σ [ ∫Ni*α*tc*ds. + ∫M*α*(ΔT/h)ds. ]
h - wysokość przekroju
∫Ni*α*tc*ds. - równomierne ogrzanie
∫M*α*(ΔT/h)ds. - nierównomierne ogrzanie
III.Wymuszone przemieszczenie
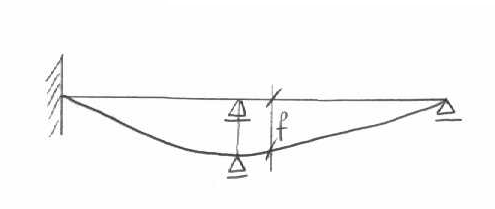
Siły wewnętrzne w układzie statycznie niewyznaczalnym,wynikłe z przemieszczenia podpór wylicza się za pomocą:
metody przemieszczeń - przemieszczenie podpór f traktuje się jako obciążenie geometryczne stanowi osiadanie podpór lub wymuszone przemieszczenia węzłów
metody sił - układ równań:
gdzie Δip = 0 - brak obciążenia zewnętrznego
x1δ11 + x2δ12 + Δ1p = -f
x1δ21 + x2δ22 + Δ2p = 0
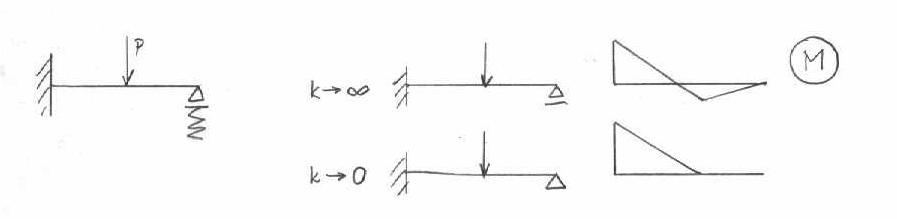
IV.Uwzględnienie sprężystego podparcia punktowego i ciągłego.
Podłoże sprężyste typu Winklera charakteryzuje parametr
k = c* b
c - moduł podatności podłoża
b - szerokość belki
np.
Podparcie ciągłe /podłoże Winklera/. Podstawowe założenia:
1.Podłoże składa się z nieskończenie wielu sprężyn,a odpór takiego podłoża jest wprost proporcjonalny do przemieszczenia
2.Brak siły tarcia między belką a podłożem /więzy gładkości/
3.Więzy przenoszą zarówno ściskanie jak i rozciąganie
Zgodnie z zał. zagadnienie sprowadza się do obliczenia belki obciążonej jak na rys.
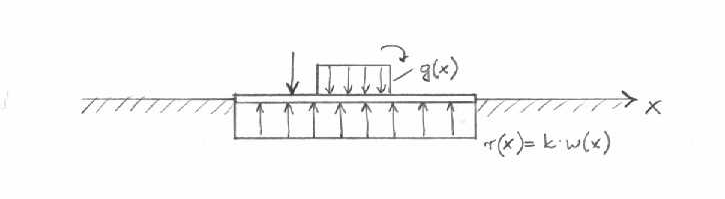
Pod wpływem przyłożonego obciążenia punkty belki doznają przemieszczeń,które związane są z momentami zginającymi EI*w''(x) = -M.(x)
Wiedząc,że M.''(x) = -q(x) + k*w(x) równanie różniczkujemy, przekształcamy itd. i w rezultacie otrzymujemy równania na w(x).
Mając dane obciążenie oraz warunki brzegowe, znamy przemieszczenia,znajdujemy funkcję momentów i sił poprzecznych.Tak rozwiązuje się belki o nieskończonej długości.
V.Wykorzystanie symetrii układu
W przypadku układów symetrycznych stosuje się schematy połówkowe,które mają mniej stopni statycznej niewyznaczalności niż układ pierwotny.Schematy połówkowe obciąża się obciążeniem rozbitym na: obciążenie symetryczne i antysymetryczne .Ostateczny wykres sił wewnętrznych otrzymuje się przez zsumowanie wykresów z symetrii i antysymetrii.

Wyszukiwarka
Podobne podstrony:
IV, Skrypty, PK - materiały ze studiów, I stopień, Examin inz, !!!Pytania do inzynierskiego, IV
Fundamenty żelbetowe, Skrypty, PK - materiały ze studiów, I stopień, Examin inz, !!!Pytania do inzyn
Projekt mostu sprężonego, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 8, Podstawy konstru
temat 3, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 2, Geodezja, od Donia - geodezja WIŚ
WYMAGANIA TECHNICZNE PODSYPKI, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 7, Podstawy bu
Pytania na geodezje, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 2, Geodezja, od Donia -
zelbet test, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 7, Konstrukcje Betonowe II, egza
temat, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 2, Geodezja, od Donia - geodezja WIŚ,
koszukla 3, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 2, Geodezja, od Donia - geodezja
KMTprojekt3, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 7, Konstrukcje stalowe II, pomoc
POLIGON SPRAWOZDANIE, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 2, Geodezja, od Donia -
bolkowska, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 8, EZP, EZP, BUDOWN i KRYZYS
STANDARDY KONSTRUKCYJNE NAWIERZCHN, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 7, Podsta
opis t, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 4, BOF
Pomiary liniowe, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 2, Geodezja, od Donia - geod
Politechnika Krakowska Wydzial Inzynierii Ladowej, Skrypty, PK - materiały ze studiów, I stopień, SE
PROJEKTOWANIE BELKI270, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 7, Konstrukcje stalow
więcej podobnych podstron