opór elektryczny- opór stawiany przez przewodnik przepływowi prądu el. def. jako stos napięcia el. U[V] do natężenia prądu I[A]
opór el. przewodnika przez który płynie prąd stały -opór czynny=rezystancja zal. gł. od: długości przewodnika, jego przekroju i materiału z którego jest wykonany.
prawo Ohma- R=U/I
R=ρl/S; ρrezystywność, o.e. właściwy, charakteryzuje właściwości el. materiału przewodnika
konduktancja- przewodność el. czynna, co do wartości jest odwrotna do rezystancji
G=1/R=σ*S/l; σprzewodność el. właściwa, konduktywność
σdla miedzi 57m/Ω*mm2
σdla aluminium 35
RR20[1+ ( rzeczywista temp w której umieszczony jest przewodnik;
współczynnik temperaturowy rezystancji dla temp 20C
dla miedzi 0,00381/C
wzrost temperatury powoduje wzrost rezystancji
prawa Kirchhoffa:
I- suma natężeń I prądów wpływających do węzła jest równa sumie natężeń prądów wypływających z tego węzła ∑I=0
II- w zamkniętym obwodzie sieci el. suma napięć na oporach R obwodu jest równa sumie sił elektromotorycznych E działających w obwodzie IR=E
rezystancja zastępcza- poł.szeregowe: Rz=R1+R2; poł.równol. 1/Rz=1/R1+1/R2; Rz=(R1*R2)/(R1+R2)
trójkąt-gwiazda- R1=(R12*R13)/(R12+R13+R23)
gwiazda-trójkąt- R12=R1+R2+(R1*R2)/R3
kondensator- układ 2 przewodzących pow.(okładzin k.) przedzielonych warstwą dielektryka; char. się określoną pojemnością elektr.C[F] i dopuszczalną różnicą potencjałów el. okładzin. Służy do krótkotrwałego przechowywania energii el. (ładunku el.) Q=C*U; C=*S/d=w**S/d; przenikalność el. próżni=8,85*10-12[As/Vm]
pojemność zastępcza-poł.równoległe: Cz=C1+C2; poł.szeregowe: 1/Cz=1/C1+1/C2
MOC-praca wykonana w jednostce czasu, M[W]=L/t; moc el.- M[W]=U[V]*I[A]=U2/R=I2*R
ENERGIA EL.-energia{wielkość wyrażająca zdolność układu fiz. do wykonania pracy} układu ładunków el. W[J][Ws]=M*t[s] 1[kWh]=[kW]*3600[s]=3,6*106[Ws]
PRĄD PRZEMIENNY
i=Im*sin(2*f*t+ ); i-wartość chwilowa prądu; Im-wartość max; f[1/s]-częstotliwość; - przesunięcie fazowe; =2f pulsacja.
Przykładem prądu elektrycznego przemiennego jest prąd elektryczny sinusoidalny, wywołany napięciem sinusoidalnie zmiennym, opisanym równaniem
U = U0*cos t; zmiany natężenia prądu elektrycznego są wówczas opisane równaniem I=I0*cos(t + ), gdzie U0 i I0 — amplitudy napięcia i natężenia prądu elektrycznego
wartość skuteczna prądu przemiennego- wartość prądu stałego który wydziela na rezystorze R w czasie t taką samą energię cieplną jak prąd sinusoidalny dla stałego:W=M*T=U*I*T=I2*R*T; dla przemiennego: W= 0∫T(M)dt=∫(i*U)dt=∫(i2*R)dt=R*∫(i2)dt
Iskut= √ [1/T∫ (i2)dt]; jeśli i=Im*sint to: I=Im/√2=0,707*Im
Reaktancja indukcyjna- XL=ω*L=2π*f*L; U=I*XL; dla prądu stałego XL=0
Reaktancja pojemnościowa- XC=1/(ω*C)=1/(2π*f*C); dla prądu stałego XC=∝
Rezonans napięć- U=UR+UL+UC=I*R+j*XL*I-j*XC*I; U=I*[R+j*(XL-XC)], gdy XL=XC obwód będzie miał charakter rezystancyjny
Rezonans prądów- I=IR+IL+IC=U/R-j*U/XL+j*U/XC; I=U*[1/R+j*(1/XC-1/XL)], gdy XL=XC. fr=1/(2√LC)
MOC- P=U*I*cosU*I*cos(2t - moc czynna:P[W]=U*I*cos moc bierna:Q[var]=U*I*sin moc pozorna:S[VA]=√(P2+Q2)=U*I
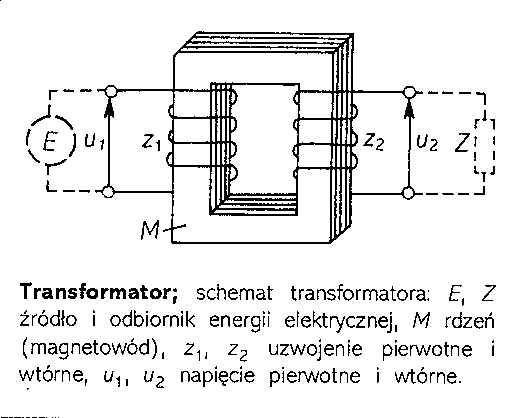
Transformatory
Transformator jest statycznym przetwornikiem energii elektrycznej wykorzystującym zjawisko indukcji elektromagnetycznej.
Transformatory: jednofazowe trójfazowe
energetyczne specjalne
Budowa: Rdzeń w postaci pakietu blach z miękkiej stali nakrzemionej (odizolowane blachy zmniejszają straty mocy w rdzeniu). Uzwojenie z izolowanych przewodów miedzianych.
Straty mocy powodują nagrzewanie transformatora.
Chłodzenie: - naturalne chłodzenie powietrzne; - chłodzenie olejem (transformatory wielkich mocy)
Jeżeli uzwojenie pierwotne zasilane jest napięciem sinusoidalnym U1 to w uzwojeniu tym popłynie prąd I1 powodujący powstanie strumienia magnetycznego fi.
fi = fimaxsinωt
Strumień indukuje w uzwojeniu pierwotnym i \ wtórnym siły elektromotoryczne E1 i E2 wynoszące: • w uzwojeniu pierwotnym
Stosunek tych sił elektromotorycznych nazywany jest przekładnią transformatora.
Stan jałowy transformatora
Transformator nieobciążony (I2 == 0). Prąd I1 jest niewielki (5%-10% znamionowego)
Wtedy E1 = U1 i E2= U2. Stąd U1/U2 = z1/z2 = ϑu (przekładnia napięciowa transfor.)
Próba stanu jałowego pozwala wyznaczyć przekładnię napięciową i straty wadzeniu transformatora.
Stan obciążenia transformatora
Transformator obciążony impedancją w uzwojeniu wtórnym płynie prąd I2, a napięcie na jego zaciskach wynosi U2=E2. Pomijając dla uproszczenia straty w transformatorze można przyjąć, że moc pozorna S1 pobierana przez transformator jest równa mocy oddawanej S2'
S1 =S2. I1*U1=I2*U2 I1/I2=z2/z1=1/ϑu
W próbach stanu obciążenia określa się m.in. charakterystykę obciążenia U2=f(I2)oraz zmienność napięcia .
Stan zwarcia awaryjnego transformatora
Transformator jest zasilany napięciem znamionowym U1N a uzwojenie wtórne jest zwarte Z2=0, U2=0
W uzwojeniach płyną duże prądy (wielokrotnie większe od znamionowych), powodując w krótkim czasie uszkodzenie transformatora.
Stan zwarcia pomiarowego
Transformator jest zasilany bardzo małym napięciem Uz przy którym 11z= I1n• Służy do wyznaczenia procentowego napięcia zwarcia uz% strat w uzwojeniach (straty w miedzi), uz% =( Uz/U1N ) * 100%
Od procentowego napięcia zwarcia zależy wartość prądu awaryjnego:
I!Z=(100%/uz% )*I1N
Maszyny prądu stałego
Uzwojenie wzbudzenia nawinięte jest na biegunach złożonych z izolowanych blach elektrotechnicznych, umocowanych do korpusu wykonanego jako odlew żeliwny. Do uzwojenia tego doprowadzony jest prąd stały, zwany prądem wzbudzenia.
Uzwojenie twomika' umieszczone jest w żłobkach wirnika, złożonego z blach elektrotechnicznych. Końcówki uzwojenia połączone są do działek komutatora/pełniącego rolę prostownika mechanicznego. Komutator obraca się razem z uzwojeniami twornika.
Do komutatora przylegają szczotki, które stanowią główne wyprowadzenie energii elektrycznej wytwarzanej w tworniku (praca prądnicowa) lub doprowadzenie energii (praca silnikowa).
Zasada działania komutatora dla dwóch wycinków komutatora i z dołączonym uzwojeniem twornika z jednym zwojem
W czasie obrotu zwój zmienia swoje położenie względem nieruchomego pola magnetycznego, dlatego następuje w nim zmiana kierunku prądu.
Jeżeli wirnik prądnicy będzie obracany z prędkością n przez silnik napędowy, uzwojenie twornika przecina pole magnetyczne, w wyniku czego zaindukuje się w nim siła elektromagnetyczna, proporcjonalna do zmian w czasie strumienia objętego zwojem: (po scałkowaniu) E=ce fif n gdzie Ce - stała elektryczna maszyny zależna od konstrukcji uzwojenia.
Aby otrzymać napięcie wygładzone należy : zastosować uzwojenie twornika o dużej liczbie zwojów rozmieszczonych w wielu żłobkach połączonych z komutatorem o dużej liczbie wycinków.
Strumień magnetyczny fif wywołany przez prąd wzbudzenia If dlatego z zależności E=ce fif n wynika, że SEM można zmieniać za pomocą prądu wzbudzenia If lub prędkości obrotowej n.
Zależność E =f(If) wynika z tego, że magnesowanie ciał ferromagnetycznych przebiega według pętli histerezy magnetycznej. Po wyłączeniu prądu wzbudzenia (If=0) w obwodzie magnetycznym maszyny pozostaje pewien magnetyzm szczątkowy, określający szczątkową siłę elektromotoryczną Esz
Uzwojenie kompensacyjne i komutacyjne stosuje się w celu ograniczenia wpływu reakcji twornika na komutację.
Prądnica obcowzbudna
Uzwojenie wzbudzenia zasilane jest z niezależnego źródła prądu stałego.
Zmiana prądu wzbudzenia If rezystorem Rr wywołuje zmianę siły elektromotorycznej E , indukowanej według krzywej magnesowania..
Napięcie wyjściowe przy obciążeniu jest mniejsze od E o spadek napięcia na rezystancji twornika: U=E-Ia*Ra
Prądnica bocznikowa
Uzwojenie wzbudzenia jest przyłączone do zacisków twornika.
Regulacja napięcia realizowana przez zmianę rezystancji R, w obwodzie wzbudzenia.
Samowzbudzenie polega na wykorzystaniu SEM szczątkowej E^ powodującej przepływ niewielkiego prądu wzbudzenia. Wytworzony strumień magnetyczny zwiększa SEM powodując wzrost prądu wzbudzenia itd.
Prądnica szeregowo-bocznikowa
Dwa uzwojenia wzbudzenia: szeregowe i bocznikowe. Uzwojenie szeregowe wytwarza strumień zależny od obciążenia prądnicy. Uzwojenie bocznikowe wytwarza strumień zależny od napięcia na zaciskach prądnicy.
Strumień uzwojenia szeregowego dobiera się tak, aby kompensował spadek napięcia występujący przy wzbudzeniu bocznikowym. Dzięki temu napięcie w mniejszym stopniu zależy od obciążenia.
Silniki elektryczne prądu stałego
Budowa silnika prądu stałego jest taka sama jak prądnicy. Jeżeli do zaciskowy maszyny prądu stałego zostanie przyłożone napięcie stałe, to uzwojenie magnesujące wytworzy strumień magnetyczny. Na znajdujące się w polu magnetycznym uzwojenie wirnika działa siła proporcjonalna do przepływającego przez uzwojenie prądu la. W silniku wytworzy się moment obrotowy: M=cm*fi*Ia gdzie cm - stała konstrukcyjna maszyny.
Silnik obcowzbudny
Równanie napięć w silniku: U=E+Ia*(Ra+Rda) gdzie: Rda - rezystor dodatkowy w obwodzie twornika; E - siła elektromotoryczna wytworzona w uzwojeniu wirnika
W stanie biegu Jałowego (M= 0) otrzymujemy prędkość biegu jałowego: n0 = U/cc fi
Regulacja prędkości silników obcowzbudnych prądu stałego może odbywać się trzema sposobami;
a) zmiana napięcia U
b) zmiana rezystancji obwodu twornika, tj. zmiana rezystancji dodatkowej Rda w obwodzie twornika
c) zmiana prądu wzbudzenia If, a tym samym zmiana strumienia fi
Silniki bocznikowe i szeregowo-bocznikowe mają podobne charakterystyki mechaniczne i takie same sposoby regulacji prędkości.
Rozruch silników prądu stałego
W chwili załączenia silnika jego prędkość n = O, czyli E=0.
Z równania napięć w silniku U=E+Ia*(Ra+Rda)
mamy prąd rozruchowy Ir=U/(Ra+Rda)
Prąd rozruchowy może osiągnąć wartość (10-20)In, dlatego powinien być ograniczony do wartości dopuszczalnej dla silnika i sieci zasilającej.
Możliwe są trzy rodzaje rozruchu:
1. Rozruch bezpośredni (dla maszyn małej mocy o dużej rezystancji uzwojeń wirnika)
2. Rozruch przy obniżonym napięciu (wymaga dodatkowych układów regulacji napięcia)
3. Rozruch za pomocą rezystancji włączonych w obwód wirnika (sposób najczęściej stosowany)
Silnik szeregowy prądu stałego
Uzwojenie wzbudzenia włączone w szereg z twornikiem.
Ponieważ strumień wzbudzenia jest proporcjonalny do prądu: fi = k Ia to moment obrotowy silnika wynosi M=c2 fi2 . Pomijając rezystancję obwodu twornika otrzymamy: ![]()
Prędkość obrotowa silnie zależy od obciążenia. Brak obciążenia może doprowadzić do gwałtownego wzrostu prędkości („rozbiegania"), prowadzącego do uszkodzenia silnika. Dlatego silniki szeregowe mogą być stosowane w przypadku trwałego sprzężenia z napędzanym urządzeniem. Stosuje się np. w trakcji elektrycznej, wózkach akumulatorowych.
Regulacja prędkości najczęściej przez zmianę napięcia zasilania (obecnie najczęściej sterowniki prądu stałego - przerywacze).
Prądnice synchroniczne
Stojan i wirnik wykonane są z materiału ferromagnetycznego.
Wirnik ma bieguny, na które nawinięte jest uzwojenie wzbudzenia zasilane prądem stałym If poprzez zestyki ślizgowe pierścien-szczotka. Liczba par biegunów oznaczana jako p.
Wirnik napędzany jest silnikiem spalinowym lub za pomocą turbiny. Gdy wirnik obraca się, pole magnetyczne wytwarzane przez uzwojenie wzbudzenia również wiruje.
Wirujące pole magnetyczne indukuje w uzwojeniach stojana siłę elektromotoryczną
o wartości chwilowej: e =E smωt
Wartość siły elektromotorycznej podobnie jak w prądnicach prądu stałego zależy od strumienia wzbudzenia i prędkości wirnika: E = cc fi n
I Częstotliwość napięcia i prądu wytwarzanego w prądnicy synchronicznej zależy od prędkości obrotowej i liczby par biegunów: F=p n/60 [Hz] , gdzie n [obr/min]
Np. stosując silnik napędowy o prędkości 750 obr/min, jeżeli chcemy uzyskać napięcie o częstotliwości 50 Hz, należy zastosować prądnicę o 4 parach biegunów.
Charakterystyki prądnicy synchronicznej:
a) charakterystyka biegu jałowego U=f(If) przy I=0 i f=const
b) charakterystyka zewnętrzna U =f(I) przy If= const ,f= const i cosϕ = const
c) charakterystyka regulacyjna If==f(I) przy U= const f= const i cosϕ = const
d) charakterystyka mechaniczna napędu prądnicy n =f(P) przy U= const i cosϕ = const
{P - moc czynna obciążająca prądnicę)
Silniki asynchroniczne
Na rdzeniu stojana rozmieszczone są w żłobkach izolowane uzwojenia trójfazowe.
Wirnik może być klatkowy lub pierścieniowy. W wirniku klatkowym żłobki wypełnione są klatką z prętów aluminiowych lub miedzianych, zwartych na końcu za pomocą pierścieni.
Wirnik pierścieniowy uzwojony jest podobnie jak 3teJan. Początki uzwojeń doprowadzone są do tabliczki zaciskowej przez 3 zestyki ślizgowe pierścień-szczotka. Umożliwia to włączenie do obwodu wirnika 3-fazowego rezystora rozruchowego.
Uzwojenie stojana wytwarza wirujące pole magnetyczne o prędkości synchronicznej ns = 60 f / p [obr/min]
Linie tego pola przecinają uzwojenie wirnika. W uzwojeniu tym zaindukuje się siła elektromotoryczna. Ponieważ obwód wirnika jest zamknięty, pod wpływem SEM popłynie prąd wytwarzający własne pole magnetyczne. Wzajemne oddziaływanie obu pól wytwarza siłę elektrodynamiczną Fe„„ działającą na pręty wirnika.
Siła ta nadaje ruch obrotowy wirnikowi. Ponieważ indukowanie się SEM w wirniku możliwe jest tylko podczas przecinania prętów uzwojenia przez pole stojana, wirnik nie może osiągnąć prędkości synchronicznej i będzie ona zawsze mniejsza {n < ns.), tak by istniała siła elektromagnetyczna. .Silnik obracacie się opóźnieniem w stosunku do pola stojana (asynchronicznie). Opóźnienie to nazywa się poślizgiem s.
s = (ns-n)/n więc n=(1-n)*ns
oślizg znamionowy (przy obciążeniu znamionowym ) wynosi zazwyczaj sn = 2-6%.
Właściwości ruchowe silnika asynchronicznego przedstawia charakterystyka mechaniczna n =f(M) (zależność prędkości wirnika od mocy na wale).
Część niestateczna charakterystyki
Po przekroczeniu momentu krytycznego Mkr (przy znacznym przeciążeniu), silnik przechodzi na niestateczną część charakterystyki mechanicznej prędkość maleje do zera.
Zmiana kierunku wirowania (nawrót) silnika asynchronicznego przez zmianę kierunku wirowania pola stojana (zamiana dwóch przewodów zasilających silnik).
Regulacja prędkości silników asynchronicznych
1. Regulacja prędkości przez zmianę liczby par biegunów uzwojenia stojana Zmieniając połączenie uzwojeń stojana zmienia sję p, czyli jednocześnie ns.
2. Regulacja prędkości przez zmianę napięcia zasilającego silnik Regulacja za pomocą autotransformatorów lub przy zasilaniu silnika przez energoelektroniczny sterownik napięcia. Mały zakres regulacji (kilkanaście % ns).
3. Regulacja prędkości przez zmianę częstotliwości napięcia zasilającego silnik Regulacja za pomocą układów energoelektronicznych z płynną regulacją częstotliwości.
Aby silnik podczas regulacji częstotliwościowej zachował niezmieniony moment krytyczny Mkr co zachodzi dla stałego strumienia (p, jednocześnie ze zmianą częstotliwości trzeba zmieniać napięcie.
4. Regulacja prędkości przez zmianę rezystancji w obwodzie wirnika (tylko silniki pierścieniowe)
Wyłączniki przeciwporażeniowe różnicowoprądowe
Wyłączniki przeciwporażeniowe różnicowoprądowe (oznaczane jako Pl) są doskonałym środkiem ochrony szerokiego zastosowania.
Przewody robocze chronionego obwodu przechodzą przez przekładnik prądowy Ferrantiego PF. Suma geometryczna prądów w przewodach roboczych (sprawnego obwodu) jest równa zero, dlatego w rdzeniu przekładnika PF nie powstaje strumień magnetyczny i w uzwojeniu różnicowym UR nie płynie prąd. Magnes (wały wyzwalacza różnicowego WR utrzymuje zworę, pokonując siłę sprężyny, która stara sieją odciągnąć. Wyłącznik pozostaje zamknięty.
Jeżeli w obwodzie za wyłącznikiem Pl nastąpi uszkodzenie izolacji i chociażby nieduży prąd popłynie do ziemi, suma prądów w przewodach roboczych nie będzie już równa zero. Powstanie strumień magnetyczny w rdzeniu przekładnika PF i siła elektromotoryczna w uzwojeniu różnicowym UR. Pod jej działaniem popłynie prąd przemienny przez uzwojenie nawinięte na kolumnie magnetowodu wyzwalacza różnicowego WR. W co drugiej połowie okresu prądu przemiennego strumień magnetyczny wytworzony przez ten prąd będzie osłabiał strumień magnesu trwałego. Sprężyna odciągnie zworę, która zwolni zapadkę w zamku Z i wyłącznik otworzy się, wyłączając uszkodzony obwód.
Naciskając przycisk testujący T wywołuje się przepływ prądu omijającego przekładnik PF. Wyłącznik przyłączony do instalacji pod napięciem powinien się otworzyć. Pozwala to na okresowe sprawdzenie sprawności wyłącznika. Sprawdza się w ten sposób' działanie samego wyłącznika (1), a nie układu ochrony obejmującego ponadto przewody ochronne (2) i uziemienie (3).
Wyłącznik P l otwiera się, gdy prąd upływający do ziemi przekracza znamionowy różnicowy prąd wyzwalający/^/,, może się otworzyć, jeśli jest on większy od połowy tej wartości. Zatem wyłącznik trzeba tak dobierać, by znamionowy prąd wyzwalający był co najmniej dwukrotnie większy od największej spodziewanej wartości prądu upływowego w zabezpieczanym obwodzie.
Wyłączniki różnicowoprądowe mogą zapobiec śmiertelnemu porażeniu w instalacji bez przewodu ochronnego i uziemienia (a). Obwód prądu zamyka się wtedy przez człowieka i albo nastąpi wyłączenie wyłącznika, albo prąd nie przekracza znamionowego prądu wyłączającego (np. 6, 10, 30 mA) i nie stanowi śmiertelnego zagrożenia.
Może też zdarzyć się sytuacja zagrażająca śmiertelnym porażeniem, na którą wyłącznik nie zareaguje (b).
TRANSFORMATORY- urządzenia służące do wytwarzania energii el.; przenosi energię prądu przemiennego z jednego obwodu el. Do drugiego; działa na zasadzie indukcji elektromagnet.
rdzeń ze stali miękkiej; nawinięte uzwojenia z drutów miedzianych przekładnia transformatora: v=E1/E2= Z1/Z2
stan jałowy- Transformator nieobciążony (I2 == 0). Prąd I1 jest niewielki (I1≅5÷10% Im {znamionowego})
Wtedy E1≈U1 E2≈U2. v=U1/U2≈ Z1/Z2
(przekładnia napięciowa transfor.)
Próba stanu jałowego pozwala wyznaczyć przekładnię napięciową i straty wadzeniu transformatora.
Stan obciążenia- Transformator obciążony impedancją w uzwojeniu wtórnym płynie prąd I2, a napięcie na jego zaciskach wynosi U2=E2. Pomijając dla uproszczenia straty w transformatorze można przyjąć, że moc pozorna S1 pobierana przez transformator jest równa mocy oddawanej S2'
E1≈U1 E2≈U2 S1≈S2; U1I1≈U2I2 p.nap. 1/v=I1/I2≈ Z2/Z1 δU%=(U20-U2)/U20*100% przy zerowym prądzie U20→U2
W próbach stanu obciążenia określa się m.in. charakterystykę obciążenia U2=f(I2)oraz zmienność napięcia .
Stan zwarcia awaryjnego- Transformator jest zasilany napięciem znamionowym U1N a uzwojenie wtórne jest zwarte Z2=0, U2=0
W uzwojeniach płyną duże prądy (wielokrotnie większe od znamionowych), powodując w krótkim czasie uszkodzenie transformatora.
Stan zwarcia pomiarowego
Transformator jest zasilany bardzo małym napięciem Uz przy którym 11z= I1n• Służy do wyznaczenia procentowego napięcia zwarcia uz% strat w uzwojeniach (straty w miedzi), uz% =( Uz/U1N ) * 100%
Od procentowego napięcia zwarcia zależy wartość prądu awaryjnego:
I!Z=(100%/uz% )*I1N
MASZYNY ELEKTRYCZNE: 1:-silniki{maszyna zam.en.el.na en.mech.} -prądnice{zam.en.mech.na en.el.}
2:-maszyny prądu stałego; -maszyny prądu przemiennego:asynchroniczne i synchroniczne{kręci się ze stałą prędk. niezależną od obciążenia}
maszyny prądu stałego- Główne części maszyny elektrycznej wirującej to stojan (część nieruchoma) i wirnik (część ruchoma); część maszyny elektrycznej (stojan lub wirnik) zawierająca uzwojenie, w którym główne pole magnet. indukuje siłę elektromotoryczną, stanowi twornik, część maszyny elektrycznej służąca jedynie do wytwarzania pola magnet. zw. jest magneśnicą.
Silnik elektryczny prądu stałego ma na osi wirnika pierścień złożony z izolowanych działek (tzw. komutator)(obraca się razem z wirnikiem) łączonych z zaciskami uzwojeń twornika; po komutatorze ślizgają się doprowadzające prąd nieruchomo osadzone szczotki elektr. (z drobnoziarnistych tworzyw z węgla uszlachetnionego) dociskane do powierzchni komutatora przez sprężynki. Działanie pola magnet., wytworzonego przez elektromagnesy stojana, na prąd elektr. w obwodzie: para szczotek, działki komutatora i uzwojenie twornika, powoduje ruch obrotowy wirnika; kierunek obrotów zależy od kierunku prądu w uzwojeniu twornika. Jeśli do zacisków maszyny przyłożymy napiecie stałe to uzwojenie magnesujące wytworzy strumień magnetyczny. Na znajdujące się w polu magnet.uzwojenie wirnika działa siła proporcjonalna do przepływającego przez uzwojenie prądu Ia. W silniku wytworzy się moment obrotowy: M=Cm*φ*Ia
Silnik obcowzbudny- R-nie napięć w silniku: U=E+Ia*(Ra+Rda); E-siła elektromotoryczna wytw.w uzwojeniu wirnika {E=Ce*φ*n}; Rda-rezystor dodatkowy w obwodzie twornika. Podstawiając za E wychodzi n=U/(Ce*φ)-(Ra+Rda)/(Ce*φ)*Ia; podst.za Ia {ze wzoru M=Cm*φ*Ia} otrzymamy n=U//(Ce*φ)-(Ra+Rda)/(Ce*Cm*φ2)*M. Charakterystyki n=f(M lub Ia). Prędkość biegu jałowego gdy M=0. Regulacja prędkości poprzez: -zmianę napięcia U; -zmianę rezystancji obwodu twornika Rda; -zmianę prądu wzbudzonego a tym samym zmiana strumienia φ.
Rozruch silników prądu stałego- w chwili załączenia silnika jego prędk. n=0 czyli E=0. Z równania napięć w silniku otrzym.prąd rozruchowy: Ir=U/(Ra+Rda). Rodzaje rozruchu: -rozruch bezpośredni {dla maszyn małej mocy o dużej rezystancji uzwojeń wirnika}; -r. przy obniżonym napięciu {wymaga dodatkowych układów regulacji napięcia}; -r.za pom.rezystancji włączonych w obwód wirnika {najczęściej stos}
Zależnie od sposobu połączenia uzwojenia twornika z uzwojeniem elektromagnesu wzbudzającego pole magnet., silniki elektryczne prądu stałego dzieli się na szeregowe, równoległe i szeregowo-równoległe. W silnikach elektrycznych szeregowych prędkość obrotowa silnie zależy od obciążenia- prędkość obrotowa zmniejsza się wraz ze wzrostem obciążenia; brak obciążenia może doprowadzić do gwałtownego wzrostu prędk.- mają skłonność do „rozbiegania się” po odłączeniu obciążenia; są stosowane w trakcji elektr. i dźwignicach. Regulacja prędk.najczęściej przez zmianę napięcia zasilania. Uzwojenie wzbudz.włączone w szereg z twornikiem. Ponieważ strumień wzb.jest prop.do prądu {φ=k*Ia} moment obrotowy: M=Cm*φ*Ia=Cm*k*Ia2=C1*Ia2 lub =C2*φ2 . korzystając z zal: n=U//(Ce*φ)-(Ra+Rda)/(Ce*Cm*φ2)*M pomijając rezystancję obwodu twornika: n=C3*U/√M W silnikach elektrycznych równol. prędkość obrotowa jest niezależna od obciążenia; są stosowane np. do napędzania obrabiarek. Silniki elektryczne szeregowo-równoległe są stosowane do napędzania maszyn o stałej prędkości obrotowej i dużych momentach obrotowych.
W przypadku maszyny elektrycznej prądu stałego istnieje pełna odwracalność funkcji prądnicy i silnika elektr. zależnie od sposobu zasilania (energią mech. czy elektr.).
Działanie prądnicy (generatora energii elektr.) opiera się na zjawisku indukowania napięcia elektr. źródłowego (tzw. siły elektromotorycznej) w przewodzie umieszczonym w zmiennym polu magnet.; zmiany pola można uzyskać w wyniku ruchu względnego pola magnet. i przewodu. W myśl reguły Lenza kierunek indukowanego w tworniku napięcia elektr. jest taki, że powstały pod jego działaniem prąd przeciwdziała ruchowi przewodu, wywołującemu indukcję. Aby pokonać siłę przeciwdziałania, trzeba zapewnić ciągły napęd prądnicy elektr. przez zewn. źródło energii mech. (silnik).
Energię mech. doprowadza do prądnicy silnik (np. spalinowy, elektr., wodny itp.) obracający wał, na którym jest umieszczony wirnik; zawiera on cewkę zasilaną prądem elektr., wytwarzającą strumień magnet. φ; wirujący z prędkością obrotową n wirnik powoduje przemienne przenikanie tego strumienia przez uzwojenie cewki o z zwojach, umieszczonej w stojanie; dzięki temu indukuje się w niej napięcie źródłowe (siła elektromotoryczna) E = φnz {wartość siły el-mot.zal.od strumienia wzbudz.i prędk.wirnika}. Stojan i wirnik zawierają zwykle kilka cewek odpowiednio połączonych; niekiedy strumień magnet. jest wytworzony przez stojan, a siła elektromotoryczna powstaje w uzwojeniu wirnika. W prądnicy prądu stałego wzbudzona przemienna siła elektromotoryczna jest prostowana za pomocą komutatora, w prądnicy prądu przemiennego natomiast siła elektromotoryczna jest doprowadzana do zacisków wyjściowych bezpośrednio (gdy uzwojenie twornikowe znajduje się w stojanie) lub za pośrednictwem pierścieni ślizgowych (gdy uzwojenie twornikowe mieści się w wirniku).
Prądnica synchroniczna- stojan i wirnik wyk. są z mat.ferrromagn. Częstotliwość napięcia i prądu wytwarzanego w prądnicy synchronicznej zal.od prędk.obrotowej i liczby par biegunów `p': f=(p*n)/60 [Hz]; n[obr/min].
Charakterystyki: -ch.biegu jałowego U=f(If) przy I=0 i f=const; -ch.zewn. U=f(I) przy If=const, f=const i cosϕ=const; -ch.regulacyjna If=f(I) przy U,f,cosϕ=const; -ch.mechaniczna napędu prądnicy n=f(P) przy U, cosϕ=const {P-moc czynna obciążająca prądnicę}
Silnik asynchroniczny- Zależnie od konstrukcji wirnika rozróżnia się silniki indukcyjne pierścieniowe {wirnik uzwojony jest podobnie jak stojan. Początki uzwojeń doprowadzone są do tabliczki zaciskowej przez 3 zestyki ślizgowe pierścień-szczotka. Umożliwia to włączenie do obwodu wirnika 3fazowego rezystora ruchowego} i klatkowe {w wirniku żłobki wypełnione są klatką z prętów alum lub miedzianych zwartych na końcach pierścieniami}. {na rdzeniu stojana rozmieszczone są w żłobkach izolowane uzwojenia 3fazowe} uzwojenie stojana wytwarza wirujące pole magnet.
maszyna elektr. (najczęściej silnik elektr.) prądu przemiennego 1- lub 3-fazowa, w której siła elektromotoryczna potrzebna do wytwarzania prądu, a zatem i momentu obrotowego wirnika, powstaje przez indukcję elektromagnetyczną w wyniku przecinania uzwojenia wirnika liniami wirującego pola magnet. stojana. Niezbędne jest do tego występowanie różnicy między prędkością wirowania n s pola stojana a prędkością obrotową n wirnika (brak synchroniczności). Prędkość wirowania pola ns (w obrotach/min) zależy od częstotliwości prądu f i liczby par biegunów p: ns = 60f / p. Silnik indukcyjny (asynchroniczny) ma prędkość obrotową n zawsze mniejszą od prędkości obrotowej ns, czego miarą jest wartość tzw. poślizgu: s = (ns- n)/n, wyrażanego często także w procentach (od ok. 1,5 do 5%). Stąd: n=(1-s)*ns . Charakterystyka n=f(M) po przekroczeniu momentu krytycznego Mkr {przy znacznym przeciążeniu} silnik przechodzi na niestateczną część charakterystyki i prędkość maleje do zera {silnik zatrzymuje się}. Zmiana kierunku wirowania silnika asynchr poprzez zmianę kier wirow pola stojana.
Regulacja prędkości silników asynchronicznych- -reg.prędk.przez zmianę liczby par biegunów uzwojenia stojana. Zmieniając połączenie uzwojeń stojana zmienia się p,czyli jednocześnie ns; -zmianę napięcia zasilającego silnik. Regul za pom autotransformatorów lub przy zasilaniu silnika energoelektronicznym sterownikiem napięcia. Mały zakres regulacji; -zmiana częstetliwości napięcia zasilajacego silnik. Reg za pom ukł energoelektronicznych z płynną regulacją częstotliwości. Silnik podczas reg częst zachowuje wtedy niezmieniony moment krytyczny co zach dla stałego strumieniaφ, jednocześnie ze zmianą częst należy zmieniać napięcie E=k*φ*ω=k1*φ*f, aby φ=const E/f≈U/f=const; -reg prędkości przez zmianę rezystancji w obwodzie wirnika {tylko pierścieniowe}
Rodzaje i charakterystyka urządzeń elektrycznych
Elektryczne urządzenia napędowe stanowią grupę najczęściej występujących w praktyce odbiorników siłowych. Głównym elementem układu napędowego jest silnik elektryczny, który zapewnia doprowadzenie energii mechanicznej do maszyn lub urządzeń. O powszechnym stosowaniu silników elektrycznych decydują ich liczne zalety, w tym głównie:
- wysoka sprawność,
- niezawodność działania,
- możliwość regulacji prędkości obrotowej,
- możliwość zastosowania zdalnego sterowania i automatyzacji.
Istnieje wiele rodzajów silników elektrycznych stosowanych w praktyce. Ogólnie silniki elektryczne można podzielić na:
- silniki prądu stałego,
- silniki prądu przemiennego.
Silniki prądu stałego są stosowane głównie w przemyśle ciężkim, górnictwie i w trakcji elektrycznej. Moce tych silników zawierają się od kilku watów [W] (mikromaszyny) do kilku megawatów [MW].
Największe jednostki pracują jako silniki walcownicze w hutnictwie oraz jako maszyny wyciągowe w górnictwie. Silniki trakcyjne mają moce od kilkudziesięciu kilowatów (tabor komunikacji miejskiej) do kilkuset kilowatów (tabor kolejowy). Najmniejsze maszyny prądu stałego mają zastosowanie jako elementy układów sterowania i automatyki. Prędkości maszyn prądu stałego są bardzo różne: silniki największych mocy są na ogół wolnoobrotowe, z kolei w mikromaszynach występują prędkości do kilkunastu tysięcy obr/min.
Zasadniczymi elementami silnika są:
- stojan złożony z jarzma z nabiegunnikami oraz uzwojeń biegunów głównych i komutacyjnych,
- wirnik (twornik) z uzwojeniem ułożonym w żłobkach na jego obwodzie,
- komutator z układem szczotek.
{kind=link}
Rys. 1. Schematyczny przekrój silnika prądu stałego
Podstawowe elementy silnika prądu stałego: 1 - jarzmo, 2 - bieguny główne z uzwojeniami, 3 - wirnik, 4 - komutator, 5 - bieguny komutacyjne.
Ze względu na sposób połączenia uzwojenia elektromagnesów (biegunów głównych) z uzwojeniem wirnika silniki prądu stałego dzieli się na:
- silniki bocznikowe (równoległe połączenie obu uzwojeń),
- silniki szeregowe (szeregowe połączenie uzwojeń),
- silniki bocznikowo-szeregowe (jedno z uzwojeń biegunów połączone jest równolegle do uzwojenia wirnika a drugie szeregowo do nich).
{kind=link}
Rys. 2. Uproszczone schematy połączeń silników prądu stałego: a) bocznikowego, b) szeregowego, c) bocznikowo-szeregowego
Uzwojenie biegunów komutacyjnych (pomocniczych) połączone jest szeregowo na stałe z twornikiem, a punkt połączenia nie jest wyprowadzony na zewnątrz silnika. Po połączeniu silnika do zasilania poprzez szczotki i uzwojenie wirnika płynie prąd. Uzwojenie to znajduje się w polu magnetycznym uzwojenia stojana, które oddziaływując siłą elektrodynamiczną na pręty uzwojenia twornika powoduje wprowadzenie wirnika w ruch obrotowy.
Znacznie szerzej w praktyce stosowane są silniki prądu przemiennego, które mogą być silnikami:
- synchronicznymi,
- asynchronicznymi (indukcyjnymi):
- klatkowymi,
- pierścieniowymi,
- komutatorowymi:
- jednofazowymi,
- trójfazowymi,
- specjalnymi (np. liniowymi).
Silniki synchroniczne są to silniki trójfazowe o mocach od kilku kW do kilku MW i prędkości obrotowej w granicach 500÷1500 obr/min (wyjątkowo 3000 obr/min). Stosowane są rzadko, głównie w napędach o specjalnej charakterystyce, takich jak: pompy, wentylatory i kompresory.
Głównymi elementami silników synchronicznych są:
- stojan z uzwojeniem trójfazowym,
- wirnik jednobiegunowy lub cylindryczny z uzwojeniem wzbudzania oraz z klatką rozruchową.
Silniki asynchroniczne trójfazowe są najtańszymi i najszerzej stosowanymi silnikami elektrycznymi. Wśród silników asynchronicznych znakomitą większość stanowią silniki z wirnikami klatkowymi, zwane silnikami klatkowymi (lub zwartymi). Są one budowane w zakresie mocy od kilku watów do kilkuset kilowatów (rzadko większej) na napięcie 0,4÷6 kV.
Silniki z wirnikami uzwojonymi, zwane silnikami pierścieniowymi są budowane w zakresie mocy od około 2 kW do kilku MW przy takich samych napięciach zasilania.
Zasadniczymi elementami silnika klatkowego są:
- stojan z umieszczonym wewnątrz pakietem blach krzemowych i uzwojeniem usytuowanym w żłobkach,
- wirnik stanowiący pakiet blach, z uzwojeniem w postaci klatki (pręty i pierścienie z aluminium).
Silnik pierścieniowy różni się tym od silnika klatkowego, że w żłobkach wirnika posiada trójfazowe uzwojenie, których końce są zwarte, a początki wyprowadzone są do pierścieni ślizgowych. Na pierścieniu umieszczone są szczotki, które umożliwiają połączenie obracającego się uzwojenia wirnika z rozrusznikiem lub regulatorem prędkości obrotowej. W silnikach pierścieniowych, które przeznaczone są do pracy bez regulacji prędkości obrotowej, wbudowane są urządzenia do zwierania pierścieni i unoszenia szczotek.
Zaletą silników pierścieniowych są: mniejszy prąd rozruchowy i możliwość regulacji prędkości obrotowej. Są one jednak bardziej kłopotliwe w eksploatacji oraz droższe od silników klatkowych.
{kind=link}
Rys. 3. Schematy połączeń silników asynchronicznych: a) klatkowego, b) pierścieniowego
Po włączeniu do sieci trójfazowe uzwojenie stojana wytwarza pole, którego prędkość wirowania zależy od liczby par biegunów.
Jeżeli umieszczony wewnątrz stojana wirnik ma swobodę ruchu obrotowego, a jego uzwojenia są zwarte (bezpośrednio lub przez rezystancję), to na skutek działania pola wirującego na prądy indukowane w tych uzwojeniach powstaje moment obrotowy, powodujący ruch wirnika zgodnie z kierunkiem pola wirującego. Prędkość wirnika ustala się na wartości bliskiej prędkości synchronicznej pola o kilka procent niższej od tej prędkości. Różnicę prędkości obrotowej pola magnetycznego (n) oraz prędkości obrotowej wirnika (n1) odniesioną do prędkości pola nazywamy poślizgiem:
Ze zwiększeniem obciążenia silnika następuje wzrost poślizgu.
Zabezpieczenia silników
Do podstawowych zabezpieczeń silników należą:
- zabezpieczenie zwarciowe,
- zabezpieczenie przeciążeniowe,
- zabezpieczenie od skutków obniżenia napięcia.
Jako zabezpieczenie zwarciowe silników o napięciu nieprzekraczającym 1 kV stosuje się bezpieczniki topikowe w trzech fazach lub wyzwalacze elektromagnetyczne trójfazowe.
Dla silników o napięciu przekraczającym 1 kV rolę zabezpieczenia zwarciowego mogą spełniać bezpieczniki topikowe w 3 fazach w połączeniu z rozłącznikiem lub nadprądowe przekaźniki bezzwłoczne.
Dla silników o mocy powyżej 2 MW i wyprowadzonych sześciu końcówkach stosuje się zabezpieczenie różnicowe wzdłużne w dwóch fazach.
Silniki o mocy powyżej 1 MW wyposaża się w zabezpieczenie od zwarć doziemnych, zasilane z przekładnika Ferrantiego.
Prąd nastawienia zabezpieczenia zwarciowego silnika powinien być jak najmniejszy - tak jednak, aby nie działać przy prądach szczytowych występujących w czasie normalnej pracy i przy rozruchu silnika.
Jako zabezpieczenie przeciążeniowe silników o napięciu do 1 kV stosuje się wyzwalacze lub przekaźniki cieplne oraz czujniki temperatury.
Dla silników o napięciu znamionowym ponad 1 kV stosuje się zabezpieczenie nadprądowe zwłoczne.
Zabezpieczenia zwarciowe silnika powinny być stosowane w trzech fazach w układach trójfazowych, natomiast w układach prądu stałego w dwu lub jednym biegunie, jeżeli drugi jest uziemiony. Nie należy stosować zabezpieczeń zwarciowych w obwodach wzbudzenia.
Każdy silnik powinien mieć zabezpieczenie zwarciowe oddzielne. Dopuszcza się zabezpieczenie zwarciowe wspólne dla grupy silników, tak dobrane, aby w przypadku zwarcia w jednym z silników zadziałało zabezpieczenie grupowe. Zabezpieczenia przeciążeniowe powinien posiadać każdy silnik za wyjątkiem:
- silników o prądzie znamionowym mniejszym niż 4 A,
- silników o mocy nie przekraczającej 10 kW dla pracy ciągłej, których przeciążenie jest mało prawdopodobne (pompy, wentylatory),
- silników stanowiących zespół z transformatorem posiadającym własne zabezpieczenie,
- silników do pracy przerywanej, których zabezpieczenie czujnikami temperatury nie jest gospodarczo uzasadnione.
W układach trójfazowych z uziemionym punktem neutralnym zabezpieczenia przeciążeniowe stosuje się w 3 fazach, bez uziemionego punktu naturalnego w 2 fazach.
Zabezpieczenie od nadmiernego obniżenia się napięcia realizowane jest jako ponadnapięciowe zwłoczne jedno- lub dwufazowe. Zabezpieczenie to należy stosować, gdy:
- obniżenie napięcia uniemożliwia pracę silnika,
- niepożądany jest samorozruch silnika zwartego,
- niedopuszczalny jest samorozruch silnika pierścieniowego,
- wskazane jest odłączenie pewnej liczby mniej ważnych silników w celu zabezpieczenia samorozruchu innym silnikom.
Układ dwóch przekaźników podnapięciowych włączonych na napięcia międzyprzewodowe jest stosowany do zabezpieczenia grupy silników lub silnika o dużej ważności z punktu widzenia procesu technologicznego. Układ z jednym przekaźnikiem podnapięciowym należy stosować do zabezpieczania pojedynczych silników o mniejszym znaczeniu.
Podstawy Elektrotechniki
1. Co to jest pojemność elektryczna? Omów układ połączeń kondensatorów.
Pojemność kondensatora nazywamy więc stosunek ładunku do napięcia występującego pomiędzy jego okładzinami czyli C=QU Jednostką pojemności jest 1 farad. Pojemność jest własnością kondensatora określająca jego zdolność do gromadzenia ładunku elektrycznego. Cechę posiadania pojemności przypisujemy nie tylko kondensatorom, ale również przewodnikowi odosobnionemu. Przy połączeniu równoległym kondensatorów napięcie na zaciskach każdego kondensatora jest takie samo Q=Q1+Q2+Q3 Przy połączeniu równoległym kondensatorów pojemność zastępcza jest równa sumie pojemności poszczególnych kondensatorów. Kondensatory łączymy równolegle np. wtedy gdy chcemy uzyskać dużą pojemność układu. Przy połączeniu szeregowym kondensatorów odwrotność pojemności zastępczej jest równa sumie odwrotności pojemności poszczególnych kondensatorów. Przy połączeniu szeregowym kondensatorów zmniejsza się pojemność zastępcza która jest zawsze mniejsza od najmniejszej z pojemności składowej C=1C'+1C'+1C'
Pojemnością elektryczną nazywamy zdolność przewodników do gromadzenia ładunków elektrycznych. Własność tą wykorzystano w kondensatorach.Kondensator to układ dwóch przewodników (elektrody, opłatki, okładziny) przedzielonych dielektrykiem (materiałem izolacyjnym).Jeżeli do kondensatora doprowadzimy napięcie zasilające (U) to na jego okładkach gromadzi się ładunek równy, co do wartości, lecz przeciwnego znaku. Proces gromadzenia ładunku nazywamy ładowaniem kondensatora. Trwa on do chwili gdy napięcie miedzy okładkami osiągnie wartość napięcia zasilającego. Ładunek jednej elektrody nazywamy ładunkiem kondensatora, a zdolność kondensatora do gromadzenia ładunku nazywamy pojemnością kondensatora C, którą wyrażamy jako stosunek ładunku zgromadzonego w kondensatorze do napięcia, przy którym został zgromadzony. Czyli C=Q/U. Jednostką jest jeden farad (1F) C - jest to podstawowy parametr (podstawowa wielkość) kondensatora, podawana przez producenta. Pojemność nie zależy od ładunku i napięcia. Stosunek Q do U jest stały dla danego kondensatora. Pojemność zależy od konstrukcji kondensatora: rodzaju dielektryka (E) ,wymiarów kondensatora.
2. Co to jest pole elektryczne i jakie wielkości go opisują?
Pole elektryczne jest to pole wywołane przez ładunki elektryczne i charakteryzuje się tym że na nieruchome ciało naładowane lub cząsteczki elementarne umieszczone w nim działa siła. Występowanie sił między ładunkami elektrycznymi oraz indukowanie się ładunków tłumaczymy w następujący sposób. Dookoła ciała naelektryzowanego powstaje pole elektryczne które działa na inne umieszczone w nim ładunki elektryczne jak też powoduje przemieszczanie się elektronów swobodnych w przewodnikach. Wielkość wektorowa opisująca pole elektryczne w danym punkcie jako stosunek siły F działającej na umieszczony w tym punkcie spoczywający próbny ładunek dodatni q do wartości tego ładunku. Jednostka natężenia - niuton na kulomb N/C - natężenie pola w takim punkcie w którym na ładunek 1C działa siła o wartości 1N. Na ogół jednostkę tą definiuje się jako różnica potencjałów Wolt. Między dwoma punktami pola elektrycznego istnieje napięcie 1V jeżeli przy przemieszczeniu ładunku 1C między tymi punktami zostaje wykonana praca 1J.
3. Co to jest pole magnetyczne i jakimi wielkościami jest opisane?
własność przestrzeni polegająca na tym że na znajdujące się w nim ciała magnetyczne lub przewodniki z prądem działa siła zwana magnetyczną. P.M. przedstawiamy za pomocą linii pola magnetycznego, którego zbiór tworzy obraz pola magnetycznego. Zwrot linii P.M. w otoczeniu przewodu wiodącego prąd zależy od zwrotu płynącego prądu. Określamy go za pomocą reguły śruby prawoskrętnej (r. Korkociągu).Jeżeli kierunek ruchu postępowego śruby prawoskrętnej jest zgodny z kierunkiem prądu płynącego przez przewód , to kierunek ruchu obrotowego śruby wskaże kierunek linii pola magnetycznego. Dla cewek stosujemy regułę prawej dłoni : Jeżeli prawą rękę położymy na cewce tak aby cztery palce obejmowały ją i były zwrócone zgodnie ze zwrotem prądu, to odchylony kciuk wskazuje zwrot linii pola wewnątrz cewki. Wielkością charakterystyczną jest gęstość linii pola, czyli
Indukcja magnetyczna. Wartość indukcji można wyliczyć badając zachowanie przewodu wiodącego prąd w polu magnetycznym. Na przewód działa siła elektrodynamiczna F=Bil gdzie B- indukcja magnetyczna, I- prąd, l- długość przewodu. Zwrot tej siły wyznaczamy regułą lewej dłoni: Jeżeli lewą dłoń ustawimy tak, aby linie pola magnetycznego zgodne ze zwrotem wektora indukcji magnetycznej były zwrócone do dłoni, a cztery palce pokryły się ze zwrotem prądu to odchylony kciuk wskaże zwrot siły F.
4.Co to jest wartość skuteczna i wartość średnia prądu sinusoidalnego?
Wartością skuteczną prądu sinusoidalnego, nazywamy taką wartość prądu stałego, który przepływając przez niezmienną rezystancję R, w czasie odpowiadającemu okresowi T, spowoduje wydzielenie na tej rezystancji takiej samej ilości energii cieplnej, co prąd sinusoidalny w tym samym czasie. Zgodnie z przytoczoną definicja wprowadzone pojęcie wartości skutecznej opiera się na równoważności energetycznej. Jeżeli przyjmiemy że w dostatecznie małym elementarnym czasie ∆t prąd się nie zmienia to energia wydzielona w postaci ciepła na rezystancji R w tym samym czasie ∆W=Ri2∆t Niezależnie od tego czy wartość chwilowa prądu i jest dodatnia czy też ujemna energia jako proporcjonalna do kwadratu wartości chwilowej prądu jest zawsze dodatnia ale w kolejnych takich samych przedziałach czas wartości energii zmienia się. Wartość średnią półokresową prądu sinusoidalnego o okresie T nazywamy średnią arytmetyczną tego prądu obliczoną za połowę okresu w którym przebieg jest dodatni. Pojęcie wartości średniej prądu sinusoidalnego opiera się na równoważności ładunku. Wartość średnia półokresowa prądu zmiennego jest to taka wartość prądu stałego którego przepływ przez przekrój poprzeczny przewodnika w czasie T/2 spowoduje przesunięcie takiego ładunku elektrycznego jaki byłby przesunięty podczas przepływu prądu zmiennego w tym samym czasie.
5. Jak mierzymy mac w układach trójfazowych symetrycznych?
Do pomiaru mocy czynnej używamy watomierzy. Watomierz ma dwa uzwojenia: napięciowe i prądowe. Początki uzwojeń są z sobą połączone. Koniec uzwojenia napięciowego połączony jest z punktem neutralnym, więc cewka napięciowa włączona jest na napięcie fazowe, a przez cewkę prądową płynie prąd pobierany przez obciążenie. Moc obliczamy ze wzoru P=UIcosφ. W układach symetrycznych czteroprzewodowych moc pobierana przez każdą fazę jest taka sama, więc wynik mnożymy przez 3.W układach trójprzewodowych stosujemy jeden watomierz z dodatkowym układem dwóch rezystorów włączonych do faz innych niż cewka prądowa. Koniec cewki napięciowej połączony jest z punktem wspólnym oporów N którego potencjał jest równy 0 . Do pomiaru mocy układów trójprzewodowych symetrycznych i niesymetrycznych stosowany jest również układ dwóch watomierzy w układzie Arona. Cewki prądowe dołączone są do dwóch przewodów fazowych, a końce cewek napięciowych dołączone są do trzeciej wolnej fazy. W układach trójfazowych czteroprzewodowych niesymetrycznych, stosujemy trzy watomierze, mierzące moc na każdej fazie. Wskazania watomierzy należy dodawać algebraicznie (z uwzględnieniem znaków) gdyż jeżeli odbiornik ma charakter indukcyjny wskazania będą dodatnie, a przy obciążeniu pojemnościowym - ujemne. Wskazania będą jednakowe tylko przy φ=0 czyli przy obciążeniu rezystancyjnym. Mnożąc różnicę wskazań watomierzy przez √3 możemy wyliczyć wartość mocy biernej pobieranej przez odbiornik.
6. Jak obliczamy rezystancję zastępczą układu szeregowego i równoległego kilku rezystorów?
Rezystancja zastępcza to taka, która włączona w obwód w miejscu zamkniętej grupy oporników nie zmienia wpływu prądów i rozkładu napięć w powstałej części obwodu. Rezystancja jest to stosunek napięcia na rezystorze do wartości przepływającego przez niego prądu R=UI
7. Jaki czynniki mają wpływ na wartość współczynnika mocy cosφ? Na czym polega jego poprawa?
Współczynnik mocy cosφ odgrywa dużą rolę z punktu widzenia efektywności wykorzystania urządzeń elektrycznych. Odbiorniki energii elektrycznej silniki elektryczne urządzenia grzejne oświetleniowe i inne są dobierane pod kątem widzenia mocy czynnej która odpowiada energia użyteczna pobrana przez te urządzenia i przekształcona w energię mechaniczną cieplną świetlną Ze względów dąży się do tego aby współczynnik mocy odbiorców energii elektrycznej był bliski jedności. W tym celu stosuje się różne metody poprawy współczynnika mocy. Wszystkie te metody polegają na kompensowaniu mocy biernej indukcyjnej mocą bierną pojemnościową Jedną z powszechnie stosowanych metod jest kompensacja mocy biernej za pomocą kondensatorów
8. Narysuj układ elektryczny i omów zjawisko rezonansu napięć.
Rezonans występujący w obwodzie o szeregowym połączeniu elementów R,L,C charakteryzujący się równościa reaktancji indukcyjnej i pojemnościowej nazywamy rezonansem napięć lub rezonansem szeregowym.Rezonans jest to taki stan pracy obwodu elektrycznego w którym reaktancja wypadkowa obwodu lub jego susceptancja wypadkowa jest równa zero. U=UR+UL+UC Jeżeli w odbiorniku istnieje szeregowe połączenie elementów R, C, L i jest prawdziwy warunek X=0, to występuje rezonans szeregowy nazywany również rezonansem napięć.Jeżeli w odbiorniku istnieje równoległe połączenie elementów R, C, L i występuje warunek B=0 to odbiornik jest w stanie rezonansu równoległego nazywanego również rezonansem prądów.
9. Narysuj układ i omów zjawisko rezonansu prądów.
Rezonans występujący w obwodzie o równoległym połączeniu elementów R,L,C, charakteryzujący się równością susceptancji indukcyjnej i susceptancji pojemnościowej nazywamy rezonansem prądów lub rezonansem równoległym
Rozpatrzmy obwód składający się z elementów R, L, C połączonych równolegle (rys.2.7)Na rysunku 2.8 przedstawiono wykres wskazowy dla tego obwodu przy założeniu, że w obwodzie występuje rezonans, a więc kąt przesunięcia fazowego między prądem I, a napięciem U jest równy zeru.W stanie rezonansu równoległego, czyli rezonansu prądów mamy: IL+IC=0 co oznacza, że prądy w cewce i kondensatorze równoważą się.
10. Omów metody pomiaru mocy czynnej w układach trójfazowych.
Do pomiaru mocy czynnej są stosowane woltomierze. Woltomierz ma dwa uzwojenia uzwojenie napięciowe zwane często cewką napięciową i uzwojenie prądowe zwane cewka prądową. Jeśli przykładowo chcemy zmierzyć moc pobieraną przez fazę A odbiornika trójfazowego połączonego w gwiazdę to zgodnie ze wzorem PA=UAJAcosφA włączamy cewkę prądową tak aby przez nią płynął prąd fazowy JA a cewkę napięciową tak aby na zaciskach cewki występowało napięcie UA Metoda dwóch woltomierzy stosuje się zarówno do pomiaru mocy układów trój przewodowych symetrycznych jak i niesymetrycznych
11. Omów moce pobierane przez elementy R,L i C które zasilano napięciem przemiennym
Rezystor W całym zakresie zmienności moc chwilowa jest dodatnia, energia jest zawsze przekazywana do odbiornika, i zamieniana na ciepło. Prąd i napięcie pozostają w fazie φ=0 Moc czynna - P=UI, P=RI2 Moc czynna jest równa pozornej P=S Moc bierna Q=0 U=RI Cewka
Napięcie wyprzedza prąd o kąt fazowy φ=П2 Amplituda sinusoidy mocy chwilowej wynosi UI.
Wartość średnia mocy chwilowej za okres jest równa zeru. Energia dodatnia dostarczona do cewki w pierwszej połowie okresu jest równa energii ujemnej zwróconej do źródła, a więc moc czynna P=0.
Bierna Q=UI, Q=XlI,, Q=BlU2 I=BlU Moc bierna indukcyjna ma znak dodatni. Kondensator Napięcie opóźnia się względem prądu o kąt fazowy φ=П2 Energia pobrana przez kondensator w pierwszej połowie okresu, w drugiej połowie zostaje oddana do źródła, moc czynna jest równa zeru. Moc bierna Q=-UI , jest równa mocy pozornej.
Q=-XcI2 Q=-BcU2 Moc bierna pojemnościowa ma znak ujemny
12.Omów stan pracy źródła napięcia.
Na rysunku przedstawiono rzeczywiste źródło napięcia do którego zacisków dołączono rezystor o nastawnej bardzo dużej rezystancji R. Rezystancję tę można zmienić w granicach od zera do R a następnie skokowo spowodować przerwę. Stan pracy źródła przy rezystancji R równej nieskończoności której odpowiada przerwa w obwodzie nazywamy stanem jałowym źródła. W stanie jałowym nie płynie prąd w obwodzie a napięcie na zaciskach źródła U0 jest równe napięciu źródłowemu E. Stan pracy źródła przy rezystancji R równej zeru której odpowiada zwarcie odbiornika nazywamy stanem zwarcia źródła. W stanie zwarcia w obwodzie płynie prąd JZ=ERw Stan pracy źródła w którym z rzeczywistego źródła napięcia jest pobierana przez odbiornik największa moc nazywamy stanem dopasowania odbiornika do źródła.
13. Omów własności magnetyczne materii. W jaki sposób wyznaczamy pętlę histerezy magnetycznej dla ferromagnetyków.
Elektrony wewnątrz atomu poruszają się po orbitach wkuł jądra, jednocześnie wykonując ruch obrotowy dookoła własnej osi - ruch spinowy. Elektrony mają spiny dodatnie lub ujemne co wynika z kierunku ich wirowania. W wyniku tego ruchu powstaje pole magnetyczne nazywane polem prądów elementarnych. Niektóre materiały ze względu na kierunek ruchu elektronów wytwarzają elementarne pola magnetyczne, wzajemnie się kompensujące, i nie wykazują na zewnątrz własności magnetycznych. Inne materiały wykazują własności magnetyczne, gdyż elementarne pola magnetyczne, nie są całkowicie w nich skompensowane. Własności magnetyczne elementarnego prądu okrężnego określa się za pomocą momentu magnetycznego, który jest iloczynem prądu elementarnego okrężnego, i pola powierzchni wyznaczonej przez orbitę tego prądu. Ferromagnetyzm jako własność materii zanika przy podgrzaniu ciała ferromagnetycznego do tak wysokiej temperatury w której ruchy termiczne uniemożliwiają równoległe układanie się spinów a więc tworzenia się domen ok770C Powyżej temperatury przemiany materiały ferromagnetyczne przechodzą w stan paramagnetyczny.
14. Podaj treść prawa: Ohma i Kirchoffa oraz omów ich zastosowanie do obliczeń obwodów prądu stałego.
Stosunek różnicy potencjałów między końcami przewodnika do natężenia płynącego prądu jest stały. Tę stałą wartość nazywamy oporem elektrycznym przewodnika: U=RJ gdzie: R - opór elektryczny w omach U - napięcie elektryczne w woltach I - natężenie prądu w amperach. Prawo to nie jest ściśle spełnione dla większości materiałów. Materiały, które się do niego stosują, nazywamy przewodnikami omowymi lub "przewodnikami liniowymi" - w odróżnieniu od przewodników nieliniowych, w których opór jest funkcją natężenia płynącego przez nie prądu. Aby warunek liniowości był spełniony, muszą jednak być zachowane stałe warunki fizyczne (np. temperatura). Ze wszystkich materiałów przewodzących prawo Ohma najdokładniej jest spełnione w przypadku
Prawo Kirchoffa Obwód rozgałęziony jest to obwód w którym istnieje więcej niż jedna droga dla przepływu prądu. Pojedyncza drogę dla przepływu prądu nazywamy gałęzią. Miejsca rozgałęzień nazywamy węzłami. Elementy należące do tej samej gałęzi są połączone szeregowo, natomiast gałęzie lub elementy włączone miedzy dwa te same węzły układu są połączone równolegle. Oczkiem obwodu nazywamy zbiór gałęzi połączonych tak, ze tworzą zamkniętą drogę dla przepływu prądu a po usunięciu jednej z gałęzi droga przestaje być zamknięta.
Prawa Kirchoffa: I Prawo Kirchoffa mówi o bilansie prądów w węźle obwodu.Suma prądów dopływających do węzła jest równa sumie prądów odpływających z węzła.II Prawo Kirchoffa (napięciowe)W dowolnym oczku obwodu prądu stałego suma algebraiczna(uwzględniając znaki)sile SEM i napiec na elementach rezystancyjnych jest równa 0.
15. Podaj wzór i definicje mocy czynnej, biernej i pozornej prądu przemiennego.
Moc czynną nazywamy wartość średnią mocy chwilowej i określamy ją wzorem P=UJcosφ Jednostką mocy czynnej jest 1 wat Moc czynna jest zatem równa iloczynowi wartości skutecznej napięcia i prądu oraz kosinusa kąta przesunięcia fazowego między napięciem i prądem zwanego współczynnikiem mocy (cosφ) Moc bierna oznaczona Q i definiowana jako iloczyn wartości skutecznych napięcia prądu i sinusa kąta przesunięcia fazowego między nimi czyli Q=UJsinφ Jednostką mocy biernej jest 1 war Moc pozorna oznaczona przez S i definiowana jako iloczyn wartości skutecznych napięcia i prądu czyli S=UJ Jednostką mocy pozornej jest 1 woltoamper (1V*A)
16. Podaj zależności pomiędzy prądami i napięciami w układach trójfazowych symetrycznych.
Rozpatrzmy układ połączony w gwiazdę, Zakładając zgodną kolejność napięć oraz symetrię obciążenia, wykres wskazowy takiego układu jest następujący:
Z trójkąta prostokątnego A'OD znajdujemy, że:
DA' = OA' cos 30* .Ponieważ: |U'AB | = U'AB = 2 DA', Otrzymujemy: U'AB = √3 U'A
Ponieważ w układzie symetrycznym wartości skuteczne napięć fazowych są jednakowe, oraz wartości skuteczne napięć przewodowych są również jednakowe, możemy zapisać ogólnie:
U = √3 Uf , I = If Oznacza to, że jeżeli Uf = 230 V, to U = 400 V.
Rozpatrzmy teraz odbiornik symetryczny połączony w trójkąt,
Na podstawie powyższych rysunków możemy stwierdzić, że prądy przewodowe są równe różnicy odpowiednich prądów fazowych:
IA = I'AB - I'CA , IB = I'BC - I'AB , IC= I'CA - I'BC ,
zaś ogólne zależności pomiędzy prądami i napięciami fazowymi i przewodowymi są następujące:
I = √3 If , U = Uf .
17. Wyjaśnij pojęcia: rezystancji, rezystywności, kondunktancji i konduktywności.
Rezystancją (oporem czynnym) nazywamy stosunek napięcia U na końcach przewodnika do natężenia prądu I w tym przewodniku. Jest to wielkość stała dla każdego rezystora. Jednostką rezystancji jest jeden om [1W] Przewodnik ma rezystancję jednego oma, gdy pod działaniem napięcia 1V przepływa przez niego prąd o natężeniu 1A. Rezystywność to opór właściwy materiału, opisuje jego własności rezystywne (oporowe), każdy materiał ma inny opór właściwy podawany w tablicach. Im większa rezystywność tym gorszy przewodnik a lepszy materiał na * m. Konduktancja (przewodność elektryczna) jestΩrezystor. Jednostka jest 1 odwrotnością rezystancji. Jest więc miarą podatności elementu na przepływ prądu elektrycznego. Zwyczajowo konduktancję oznacza się symbolem G Jednostką konduktancji w układzie SI jest simens (1 S). Konduktywność materiału (przewodność właściwa) - jest to stała materiałowa opisująca własności przewodzące materiału. Im konduktywność większa tym lepszy przewodnik.
18. Wyjaśnij zjawisko indukcji elektromagnetycznej.
zjawisko powstawania prądu elektrycznego w obwodzie pod wpływem zmian strumienia indukcji magnetycznej. Powstające prądy nazywamy prądami indukcji magnetycznej. Siłę elektromotoryczną wyznaczamy e=-Blv B - indukcja , l - długość przewodu, v - prędkość. Znak minus wynika z reguły Lenza: w zamkniętym obwodzie zwrot siły elektromotorycznej e oraz prądu indukowanego i jest taki, że wielkości te przeciwdziałają zmianą strumienia magnetycznego, będącego ich źródłem, a więc zmniejszają strumień wtedy, gdy jest on w stanie narastania, a zwiększają gdy jest w stanie zanikania. Podstawowym zjawiskiem na którym oparte jest elektromaszynowe wytwarzanie energii elektrycznej jak też jej przetwarzanie jest zjawisko indukcji elektromagnetycznej. Zjawisko indukcji elektromagnetycznej polega na indukowaniu się siły elektromotorycznej w przewodzie poruszającym się w polu magnetycznym lub w zamkniętym obwodzie obejmującym zmienny w czasie strumień magnetyczny Jest przy tym obojętne z jakiej przyczyny zmienia się strumień magnetyczny objęty przez dany obwód lub daną cewkę.
19. Wyjaśnij zjawisko indukcyjności własnej i wzajemnej.
Podczas przepływu prądu elektrycznego przez cewkę powstaje w jej otoczeniu strumień magnetyczny Przy określonej wartości prądu wartość strumienia magnetycznego zależy od wymiarów cewki jej liczby zwojów i środowiska w jakim zamyka się strumień Indukcyjnością własną cewki nazywamy stosunek strumienia skojarzonego z cewki ψ do prądu I płynącego przez cewkę. Indukcyjność własną oznaczamy przez L i określamy wzorem L=ψI
Jeżeli przez przewód zwój lub cewkę o N zwojach płynie prąd elektryczny to w środowisku otaczającym te elementy powstaje pole magnetyczne Jeżeli w polu tym znajduje się inny element np. druga cewka to strumień magnetyczny wytworzony przez element pierwszy kojarzy się z obydwoma elementami Linie pola magnetycznego wytworzone w jednym z elementów mogą przy tym przenikać przez element drugi całkowicie lub tylko częściowo. Stosunek strumienia magnetycznego wytworzonego w cewce pierwszej I i skojarzonego z cewką 2 do prądu płynącego w cewce pierwszej nazywamy indukcyjnością wzajemną cewki pierwszej i drugiej M12=ψ11I1
20. Wyjaśnij zjawisko przepływu prądu w cieczach.
Przewodnictwo elektryczne elektrolitów ma charakter jonowy Pod wpływem pola elektrycznego w elektrolicie następuje przepływ prądu elektrycznego polegający na ruchu jonów dodatnich i jonów ujemnych Cechą charakterystyczną przewodnictwa jonowego jest występowanie zmian chemicznych w środowisku przewodzącym jakim jest elektrolit. Podczas elektrolizy na katodzie wydziela się wodór lub metal na anodzie przebiega natomiast proces utleniania Wraz z ruchem jonów w kierunku odpowiednich elektrod jest przenoszona pewna masa odpowiadająca masie cząsteczkowej jonu. Pod wpływem wody w roztworach następuje zjawisko dysocjacji polegające na rozpadzie cząsteczek na jony dodatnie-kationy i jony ujemne-aniony Stopień dysocjacji zależy od stężenia roztworu i jego temperatury.
21. Zdefiniuj pracę moc prądu elektrycznego.
Prąd elektryczny przepływający przez odbiorniki pokonuje ich oporność czyli wykonuje pewną pracę Praca jest tym większa im wyższe napięcie U większe natężenie prądu J oraz dłuższy czas przepływu t. L=U*J*t Praca prądu elektrycznego płynącego w zewnętrznej części obwodu jest równa iloczynowi napięcia natężenia prądu i czas jego przepływu Praca prądu elektrycznego może być wyrażona iloczynem kwadratu natężenia prądu przez opór obwodu i czas przepływu 1J=1C*1V Pracę prądu elektrycznego mierzymy za pomocą liczników energii elektrycznej moc natomiast woltomierzami Mocą nazywamy stosunek wykonanej pracy do czasu w którym została ona wykonana Moc prądu jest więc iloczynem napięcia przez natężenie przepływającego prądu albo iloczynem kwadratu natężenia prądu przez opór części zewnętrznej obwodu Jednostką mocy jest wat
22. Zdefiniuj wielkości charakteryzujące prąd i napięcie przemienne.
Prąd przemienny charakteryzują następujące wielkości: częstotliwość, napięcie, natężenie, moc. Częstotliwość określa liczbę cykli zjawiska okresowego występujących w jednostce czasu. W układzie SI jednostką częstotliwości jest herc (Hz). Częstotliwość 1 herca odpowiada występowaniu jednego zdarzenia (cyklu) w ciągu 1 sekundy. Najczęściej rozważa się częstotliwość drgań, częstotliwość napięcia, częstotliwość fali.
Napięcie elektryczne różnica potencjałów elektrycznych między dwoma punktami i jest równe pracy jaką wykona ładunek jednostkowy przechodząc między punktami między którymi określa się napięcie. W przypadku źródła napięcia jest jego najważniejszym parametrem i określa zdolności źródła energii elektrycznej do wykonania pracy.
Jednostką napięcia elektrycznego jest wolt, a do jego pomiaru stosuje się woltomierze.
Natężenie prądu (czasem nazywane prądem elektrycznym) jest stosunkiem ilości ładunku elektrycznego przepływających przez przekrój poprzeczny przewodnika do czasu przepływu ładunku.
Natężenie prądu oznaczamy literą I, a jego jednostką w Układzie SI jest amper [A]. Do pomiaru natężenia prądu elektrycznego służy amperomierz, a do wyznaczania jednostki - waga prądowa.
Moc jest wielkością fizyczną określającą ilość pracy wykonaną w jednostce czasu przez układ fizyczny. Jednostką mocy w układzie SI jest wat (W).
Maszyny elektryczne
1. Jak zbudowany jest autotransformator i jaka jest jego zasada działania.
Autotransformator jest to taki transformator, w którym uzwojenie napięcia dolnego stanowi część napięcia górnego. Autotransformator ma tylko jedno uzwojenie, z którego są wyprowadzone do zacisków zewnętrznych trzy przewody:
Dwa z końców uzwojenia, a trzeci z wybranego odpowiednio do danego napięcia punktu ze środka uzwojenia. Autotransformator może służyć zarówno do obniżenia napięcia, jak też do podwyższenia napięcia zależnie od tego, do których zacisków jest doprowadzone napięcie zasilające.
Autotransformatory mogą być wykonane:
-o stałej liczbie zwojów uzwojenia wtórnego,
-o zmiennej skokowo liczbie zwojów uzwojenia wtórnego,
-o zmiennej płynnie liczbie zwojów uzwojenia wtórnego
2. Jaka jest zasada budowy i działania silnika indukcyjnego?
Maszyna indukcyjna składa się z części nieruchomej czyli stojana, ma on kształt wydrążonego wewnątrz walca. W wewnętrznej części stojana znajduje się część wirująca maszyny zwana wirnikiem, również w kształcie walca.
Obwód magnetyczny maszyny składa się z dwóch części: rdzenia stojana rdzenia wirnika, oddzielonych od siebie szczeliną powietrzną. Szczelina powietrzna między stojanem a wirnikiem ma w małych 3 mm.÷maszynach grubość kilku dziesiątych milimetra, w dużych (powyżej 20 kW) 1 Rdzenie stojana i wirnik wykonane są w formie pakietu z blach izolowanych między sobą najczęściej o grubości 0,5 mm
3. Jaka jest zasada budowy i działania transformatora?
Zasada budowy każdego transformatora jest taka sama: musi on mieć rdzeń stanowiący obwód magnetyczny oraz dwa obwody elektryczne: uzwojenie górne i uzwojenie dolne. Buduje się dwa rodzaje transformatorów jednofazowych różniące się kształtem obwodu magnetycznego (rdzenia).Są to transformatory rdzeniowe i transformatory płaszczowe. Cześć rdzenia na których są umieszczone uzwojenia nazywamy kolumnami i słupami ,a cześć łącząca kolumny - jarzmami. Przestrzeń zawartą między kolumną a jarzmem nazywa się oknem.
Zasada działania.
Każdy transformator składa się z trzech podstawowych elementów:
-uzwojenia pierwotnego (zasilanego)
-uzwojenia wtórnego (odbiorczego)
-rdzenia ferromagnetycznego, na którym są umieszczone oba uzwojenia.
Uzwojenia pierwotne i wtórne stanowią obwody elektryczne transformatora, a rdzeń jest obwodem magnetycznym. Uzwojenia nie są ze sobą połączone elektrycznie tylko sprzęgnięte strumieniem magnetycznym przenikającym rdzeń.
4. Jaka jest zasada działania diody prostowniczej.
Zadaniem diod prostowniczych jest przetwarzanie prądu przemiennego na prąd jednokierunkowy. Proces przetwarzania prądu przemiennego na prąd jednokierunkowy nazywa się prostowaniem. Nowoczesne diody prostownicze mogą pracować w ściśle określonym zakresie temperatur i są one bardzo wrażliwe na przepięcia, występujące zwłaszcza w kierunku zaporowym. Diody prostownicze odznaczają się szczególnie dużą sprawnością dzięki małemu spadkowi napięcia w kierunku przewodzenia i dużej wartości napięcia wstecznego pojedynczego elementu w kierunku zaporowym
5. Jakie dane ogólne i dane znamionowe zawiera tabliczka znamionowa maszyny elektrycznej?
Każda maszyna powinna mieć tabliczkę znamionową, umocowaną na stałe w miejscu umożliwiającym łatwe odczytanie zawartych na niej informacji. Na tabliczce znamionowej powinny być wykonane w sposób trwały czytelne napisy zawierające następujące dane:
-nazwa lub znak wytwórni, która maszynę wykonała
-typ maszyny wg oznaczenia wytwórcy
-nr fabryczny maszyny
-przepisy (nr normy), wg których maszyna została wykonana
-dopuszczalną temperaturę otoczenia
Ponadto na każdej tabliczce znamionowej powinny się znajdować podstawowe dane znamionowe:
-moc znamionowa silnika PN
-napięcie znamionowe UN
-prąd znamionowy IN
-znamionowa prędkość obrotowa nN
-moment znamionowy silnika M
-znamionowy współczynnik ϕmocy cos
6. Omów budowę transformatorów trójfazowych. Jakie stosuje układy i grupy połączeń ich uzwojeń?
Stosowane są trzy układy połączeń transformatorów trójfazowych; w gwiazdę, w trójkąt i w zygzak. Układ połączeń w gwiazdę może być zrealizowany przez połączenie we wspólnym punkcie neutralnym wszystkich trzech końców uzwojeń lub wszystkich początków. Początki lub końce są wyprowadzone do tabliczki zaciskowej. Początkami uzwojeń usytuowanych na jednej kolumnie transformatora nazywa się umownie zaciski, które dla pewnej wybranej chwili mają wyższy potencjał od drugich zacisków w parach przynależnych do danego uzwojenia. Punkt neutralny może być wyprowadzony lub nie. Dla takiego 3 razy większe od napięć fazowych, a prądy√układu napięcia międzyprzewodowe są 3 Uf ; I = If√przewodowe są równe prądom fazowym U =
Układ połączeń w trójkąt powstaje przez połączenie końca pierwszej fazy z początkiem drugiej, końca drugiej z początkiem trzeciej, a końca trzeciej z początkiem pierwszej lub też przez połączenie końca pierwszej fazy z początkiem trzeciej, końca trzeciej z początkiem drugiej, a końca drugiej z początkiem pierwszej. W układzie połączeń w trójkąt napięcia fazowe są równe między przewodowym a prądy fazowe są 3If√3 razy mniejsze od prądów przewodowych U = Uf ; I = √
Układ połączeń w zygzak jest układem specjalnym umożliwiającym rozłożenie na dwie kolumny przepływu wywołanego prądem jednej fazy. Z tego względu połączenie w zygzak tworzy się łącząc szeregowo dwie połówki uzwojenia umieszczone na dwóch kolumnach w sposób cykliczny (przy czym obie połówki uzwojenia muszą być połączone przeciwnie). Wolne końce jednych połówek łączy się w gwiazdę, a wolne drugich połówek wyprowadza się na tabliczkę zaciskową.
7. Omów sposób rozruchu silników indukcyjnych.
Rozruchem nazywamy stan pracy od chwili załączenia napięcia do osiągnięcia przez maszynę ustalonej prędkości, określonej parametrami zasilania (napięciem i częstotliwością) i obciążenia (momentem hamującym. Rozruch silnika jest możliwy tylko wtedy, gdy istnieje nadwyżka momentu wytwarzanego przez silnik M nad momentem obciążenia Mh. Przy rozpatrywaniu jakości rozruchu bardzo istotna jest wartość prądu pobieranego z sieci w czasie rozruchu - prąd ten nazywa się prądem rozruchowym Ir, oraz wartości momentu rozwijanego przez silnik w chwili rozruchu - moment ten nazywa się momentem rozruchowym Mr (lub momentem początkowym). Istotny jest również czas trwania rozruchu.
Sposoby rozruchu silników indukcyjnych:
-za pomocą rozrusznika - ten sposób można stosować tylko do silników pierścieniowych. Polega on na włączeniu w obwód uzwojenia wirnika nastawianej (płynnie lub skokowo) regulacji dodatkowej, nazywanej rozrusznikiem
-za pomocą przełącznika gwiazda-trójkąt. Przełącznik gwiazda-trójkąt może być używany do rozruchu tylko takich silników indukcyjnych, które mają wyprowadzone na tabliczkę zaciskową sześć końcówek uzwojenia stojana. Napięcie sieci zasilającej powinno być równe napięciu znamionowemu uzwojenia stojana połączonego w trójkąt
-za pomocą autotransformatora- transformatory stosowane do tego celu mają stałą lub nastawianą (płynnie lub skokowo) przekładnie napięciową nu. Napięcie sieci zasilającej powinno być równe napięciu znamionowemu stojana
za pomocą rezystancji włączonej w obwód stojana - ten sposób rozruchu jest stosowany tylko w przypadku silników małej mocy, ponieważ uzyskuje się tu ograniczenie prądu rozruchowego, ale jednocześnie bardzo znaczne zmniejszenie momentu rozruchowego
8. Omów sposób zmiany kierunku wirowania oraz regulacji prędkości obrotowej silnika indukcyjnego.
Kierunek wirowania wirnika w silniku indukcyjnym jest zgodny z kierunkiem wirowania pola magnetycznego. Aby zmienić kierunek wirowania silnika indukcyjnego, należy zmienić kierunek wirowania pola magnetycznego w maszynie. Kierunek wirowania pola magnetycznego zależy od kolejności następujących faz sieci trójfazowej zasilającej uzwojenie (silnik). Czyli wniosek jest taki:
Zmianę kierunku wirowania silnika indukcyjnego uzyskuje się zmieniając kolejność faz sieci zasilającej silnik.
Silniki indukcyjne często pracują w napędach elektrycznych, gdzie istnieje także konieczność regulacji prędkości obrotowej. Na podstawie zależności n = n1 (1 - s) określającej prędkość wirowania wirnika i (1 - s) z którego można wysnuć_ obr./min. Otrzymamy wzór n = _zależności n = wniosek, że prędkość obrotowa wirnika silnika indukcyjnego będzie się zmieniała, jeżeli zmienia się jedna z wielkości:
-częstotliwość napięcia zasilającego,
-liczba par biegunów magnetycznych,
-poślizg
9. Omów straty mocy, sprawności, nagrzewanie się i stygnięcie maszyn elektrycznych.
We wszystkich maszynach elektrycznych podczas pracy występują straty w których wynika pewna część mocy jest zamieniana na ciepło i maszyny się nagrzewają Wszystkie występujące w maszynach straty można podzielić na: Straty w uzwojeniu, straty w rdzeniu, straty mechaniczne, straty dialektyczne. Sprawność znamionowa odpowiada mocy znamionowej przy której występują straty znamionowe ponieważ zwykle maszyny dobiera się tak aby pracowały jako niedociążone projektuje się je tak aby sprawność maksymalna występowała przy obciążeniu mniejszym od znamionowego Nagrzewanie maszyn można zmniejszyć przy: zmniejszeniu strat powiększeniu powierzchni chłodzenia wzmożenie intensywności chłodzenia
10. Omów układ połączeń wewnętrznych silników prądu stałego.
zasada działania maszyny prądu stałego nie ulega zmianie niezależnie od tego, jak jest wytwarzane pole magnetyczne w maszynie. Najczęściej pola magnetyczne w maszynach prądu stałego są wytwarzane przez elektromagnesy, których uzwojenie jest zasilane prądem stałym zwanym prądem wzbudzenia. Stad w maszynach prądu stałego można mówić o trzech prądach, są to:
-prąd twornika Ia
-prąd wzbudzenia If
-prąd obciążenia I (oddawany do sieci lub pobierany z sieci).
Maszyna obcowzbudna - to maszyna w której uzwojenie wzbudzające jest zasilane z oddzielnego źródła.
Maszyna samowzbudna - to taka maszyna w której uzwojenie wzbudzające jest zasilane z tego samego źródła co uzwojenie twornika.
W zależności od sposobu połączenia uzwojenia wzbudzającego i uzwojenia twornika, rozróżnia się maszyny samowzbudne:
-bocznikowe - w których uzwojenie wzbudzające połączone jest równoległe z uzwojeniem twornika
-szeregowe - w których uzwojenie wzbudzające jest połączeniem szeregowym z uzwojeniem twornika
-szeregowo - bocznikowe - w których uzwojenie wzbudzające składa się z dwóch części, z których jedna jest połączona szeregowo a druga równolegle z uzwojeniem twornika
11. Omów warunki pracy równoległej transformatorów.
Pracą równoległą transformatorów nazywamy taką pracę, przy której strony pierwotne dwu lub kilku transformatorów są zasilane ze wspólnych szyn, a strony wtórne tych transformatorów zasilają odbiory również przez wspólne szyny. Praca równoległa transformatorów jest poprawna, jeżeli spełnione są następujące warunki:
-w obwodach wtórnych transformatorów w stanie jałowym nie płyną żadne prądy
-transformatory obciążają się proporcjonalnie do ich mocy znamionowych
-odpowiednie prądy poszczególnych transformatorów są ze sobą w fazie, czyli prąd w linii jest sumą arytmetyczną prądów poszczególnych transformatorów
Warunki jakie muszą spełniać transformatory dopuszczone do pracy równoległej:
(przy%-równość przekładni z dokładnością do 0,5 jednakowych napięciach znamionowych)
-przynależność transformatorów do tych samych grup połączeń o tym samym przesunięciu godzinowym
-równość napięć %zwarcia z dokładnością do 10
-stosunek mocy znamionowych nie większy niż 3:1
12. Omów zasadę budowy i działania maszyny synchronicznej.
Maszyną synchroniczną nazywa się maszynę prądu przemiennego, której wirnik w stanie ustalonym obraca się z taką samą prędkością , z jaką wiruje pole magnetyczne.
Maszyny synchroniczne są budowane w dwóch zasadniczych odmianach:
-z biegunami utajonymi (z wirnikiem cylindrycznym)
-z biegunami jawnymi (z wirnikiem jawnobiegunowym)
Ogólna zasada budowy maszyn synchronicznych jest prosta i dotyczy wszystkich maszyn synchronicznych. Obwód 0,5÷magnetyczny stojana (rdzeń) tworzą pakiety złożone z blach o grubości 0,35 mm. Rdzeń jest osadzony w korpusie wykonanym jako odlew lub konstrukcja spawana. W żłobkach pakietu twornika jest umieszczone uzwojenie prądu przemiennego jednofazowe lub trójfazowe. Wirnik maszyny synchronicznej nie jest przemagnesowywany, wykonuje się go wiec z materiału litego (odkuwki stalowej lub odlewu staliwnego). Na wirniku jest umieszczone uzwojenie wzbudzające zasilane prądem stałym. Uzwojenie to może być umieszczone w żłobkach - bieguny utajone lub na biegunach jawnych
13. Podaj ogólne zasady doboru silnika napędowego i przekształtnika
Dobór silnika rozpoczyna się zebraniem nast. danych: rodzaju maszyny roboczej, sposobu jej pracy przebiegu cyklu pracy wymaganego zakresu sterowania prędkości, zapotrzebowania mocy, występującego przeciążenia, momentu rozruchowego warunków pracy maszyny roboczej. Dobranie silnika polega na określeniu: Rodzaju silnika który powinien być przystosowany do wymagań maszyny napędzanej. Mocy silnika która nie może być zbyt mała gdyż silnik będzie się nadmiernie nagrzewał ani zbyt duża gdyż będzie pracował nieekonomicznie. Momentu silnika który musi zapewniać pokonanie momentu statycznego maszyny roboczej i przeciążeń momentu oraz rozruch w określonym czasie. Prędkości kątowej silnika która powinna być możliwie zbliżona do prędkości maszyny roboczej przy bezpośrednim sprzęgnięciu wału silnika z wałem maszyny roboczej. Rodzaju konstrukcji Rodzaju budowy. Przekształtnik powinien być dostosowany do pracy w normalnych warunkach eksploatacji tzn wilgotności powietrza zapylenia temperatury itp. Przekładnik produkuje się przy założeniu że poziom odkształceń napięcia zasilania nie przekracza wartości określonej dla klas odporności
14. Przedstaw analizę pracy transformatora w stanie jałowym. Narysuj schemat zastępczy i wykres wektorowy prądów i napięć transformatora w stanie jałowym.
stan jałowy transformatora jest to taki stan, w którym uzwojenie pierwotne jest dołączone do źródła prądu przemiennego, a uzwojenie wtórne jest otwarte. Transformator w stanie jałowym jest nieobciążony, a więc nie oddaje żadnej mocy (w uzwojeniu wtórnym nie płynie prąd). Stąd wniosek, że cała moc P10 pobrana w stanie jałowym jest zużyta na pokrycie strat. Mogą tu być brane pod uwagę straty w miedzi i straty w stali.
Schemat zastępczy transformatora w stanie jałowym
15. Przedstaw analizę pracy transformatora w stanie obciążenia. Narysuj schemat zastępczy i wykres wektorowy prądów i napięć transformatora w stanie obciążenia.
stanem obciążenia transformatora nazywamy taki stan pracy, w którym uzwojenie pierwotne jest zasilane napięciem znamionowym, a w obwód wtórny jest włączony odbiornik. W stanie obciążenia transformatora w obu uzwojeniach płyną prądy. Prąd strony wtórnej I2 zależy od napięcia na zaciskach tej strony oraz od parametrów odbiornika. Natomiast prąd strony pierwotnej I1 zawsze tak dostosowuje się do prądu obciążenia, aby wyp = N1I1 - N1I1 wywoływał strumieńΘsumaryczny przepływ magnesujący rdzeń indukujący siłę elektromotoryczną E1 zbliżoną do napięcia zasilaniaφgłówny U1.
Schemat zastępczy w stanie obciążenia
16. Przedstaw analizę pracy transformatora w stanie zwarcia. Narysuj schemat zastępczy i wykres wektorowy prądów i napięć transformatora w stanie zwarcia.
Stanem zwarcia transformatora nazywamy taki stan, w którym do uzwojenia pierwotnego jest doprowadzone napięcie zasilające, a uzwojenie wtórne jest zwarte. Napięcie na zaciskach zwartego uzwojenia jest równe zeru i dlatego, mimo że prąd w nim płynie, nie wydaje on mocy na zewnątrz do odbiornika. Moc pobierana przez zwarty transformator pokrywa wyłącznie straty zmieniając się całkowicie w ciepło.
Napięcie zwarcia jest to takie napięcie doprowadzone do pierwotnych zacisków transformatora przy zwartym uzwojeniu wtórnym pod wpływem którego w uzwojeniach transformatora płyną prądy znamionowe.
Transformator w stanie zwarcia schemat zastępczy
17. Przedstaw budowę i zasadę działania maszyny prądu stałego.
Każda maszyna prądu stałego składa się z dwóch podstawowych części: nieruchomego stojana i wirującego wirnika.
Stojan najczęściej jest magneśnicą, gdyż w nim jest wytworzone pole magnetyczne. W skład nieruchomego stojana wchodzą następujące elementy: jarzmo, bieguny główne z uzwojeniem wzbudzającym, bieguny pomocnicze (komutacyjne) z uzwojeniem, tarcze łożyskowe i trzymadła szczotkowe
18. Przedstaw podział urządzeń energoelektronicznych oraz wymień rodzaje półprzewodnikowych przyrządów mocy.
Półprzewodnikowe przyrządy mocy (PPM): Konstrukcja, parametry i charakterystyki:
-diody; bipolarna i unipolarna,
-tranzystory; bipolarny (BJT) ,polowy (MOSFET), bipolarny z izolowaną bramką (IGBT) ,elektrostatyczny (SIT),
-tyrystory; konwencjonalny (SCR), szybki, dwukierunkowy, wyłączalny (GTO),
-układy scalone mocy, moduły elektroizolowane. Grupowe łączenie PPM. Straty mocy i chłodzenie PPM.
19. W jaki sposób powstaje wirujące pole magnetyczne.
Wirujące pole magnetyczne może być wytworzone przez wirujący magnes trwały lub wirujący elektromagnes zasilany prądem stałym. Powstające pole wirujące względem stojana, natomiast względem wirnika jest ono nieruchome. Rozkład indukcji zależy od sposobu rozmieszczania uzwojenia i od kształtu szczeliny. W powyższych dwóch przypadkach pole magnetyczne wirujące powstaje w układzie ruchomym (element wytwarzany pole wirujące). Możliwe jest jednak to że pole magnetyczne wirujące może powstać w układzie nieruchomym. W tym przypadku zwoje najczęściej są połączone w gwiazdę i zasilane prądem trójfazowym. Liczba zwojów przypadających na jedną fazę uzwojenia trójfazowego może być różna (uzwojenie trójfazowe symetryczne
20. Wyjaśnij zasadę działania tranzystora.
Tranzystory są grupą elementów elektronicznych o regulowanym przepływie ładunków elektrycznych podobnie jak w lampach elektronowych. Ze względu na zasadę działania tranzystory dzieli się na dwie grupy:
-tranzystory bipolarne
-tranzystory unipolarne lub inaczej polowe
W tranzystorach bipolarnych przenoszenie prądu odbywa się na skutek ruchu nośników większościowych oraz nośników mniejszościowych. Stąd nazwa tranzystory bipolarne, tj. dwubiegunowe.
W tranzystorach unipolarnych przepływ prądu powodują nośniki tylko jednego znaku, a napięcie sterujące powoduje zmianę rezystancji drogi ich przepływu
21. Wyjaśnij zasadę działania tyrystora.
Tyrystorem nazywa się specjalną diodę krzemową mającą dodatkową elektrodę zapłonową zwaną bramką. Jest element półprzewodnikowy o strukturze czterowarstwowej typu p-n-p-n. Element ten do chwili doprowadzenia do bramki impulsu prądu załączającego nie przewodzi prądu elektrycznego, pomimo polaryzacji w kierunku przewodzenia. Wyłączenie prądu bramki nie przerywa prądu płynącego przez tyrystor
22. Wymień materiały stosowane do budowy maszyn elektrycznych.
Materiały wykorzystywane do budowy maszyn elektrycznych ze względu na spełnianą przez nie w maszynie funkcję rozróżniamy:
-materiały przewodzące, których cechą charakterystyczną jest ich duża konduktywność ), określająca zdolność do przenoszeniaγ(przewodność elektryczna właściwa ładunków elektrycznych.
-materiały magnetyczne, które dzielą się na dwie zasadnicze grupy:
-materiały magnetycznie miękkie - łatwo ulegają namagnesowaniu i wykazują małe straty energii przy przemagnesowaniu
-materiały magnetycznie twarde - utrzymują po namagnesowaniu i usunięciu pola magnetycznego znaczną część indukcji nasycenia wytworzonej kosztem zużycia dużej energii
-materiały elektroizolacyjne, które powinny się charakteryzować :
-dobrymi właściwościami dielektrycznymi
-odpornością na wpływ temperatury
-dobrą przewodnością cieplną
-dużą odpornością na wilgoć i wpływy chemiczne
-odporność na starzenie się
-materiały konstrukcyjne - zadaniem których jest zapewnienie maszynie odpowiedniej sztywności, wytrzymałości na drgania, uderzenia itp
INSTALACJE
3 Jak zbudowany jest przekładnik napięciowy Przekładniki napięciowe służą do transformacji napięcia na żądane napięcia znormalizowane do zasilania cewek napięciowych przyrządów pomiarowych i przekaźników. Zasada działania przekładników napięciowych jest analogiczna jak zasada działania transformatora, z tym że ich moc jest wielokrotnie mniejsza i praca odbywa się w stanie zbliżonym do stanu jałowego. Przekładniki napięciowe są budowane jako indukcyjne i pojemnościowe. Te pierwsze są transformatorami z rdzeniem zamkniętym, pracują przy małym obciążeniu strony wtórnej i mają znamionową indukcję zbliżoną do wartości 1,0 T. Obciążenie jest ograniczone przez spadek napięcia na impedancji wzdłużnej transformatora. Spadek ten powinien być możliwie najmniejszy, aby napięcie wtórne jak najwierniej odwzorowywało napięcie pierwotne. Istnieje wiele konstrukcji przekładników napięciowych, a różnice wynikają przede wszystkim z rodzaju izolacji uzwojeń. Przekładniki na niskie i średnie napięcia są najczęściej wykonane jako suche, natomiast na wysokie i najwyższe napięcia, mają na ogół uzwojenia i rdzeń umieszczone w kadzi wypełnionej olejem. Przekładniki charakteryzują się: - napięciem znamionowym pierwotnym, - poziomem izolacji, - sposobem łączenia zacisków pierwotnych, - liczbą uzwojeń wtórnych i ich przekładnią, - mocą znamionową, - współczynnikiem napięcia znamionowego, - klasą dokładności.
19 Montaż instalacji elektrycznych Jest wiele systemów montażu instalacji elektrycznej różniącej się sposobem układania przewodów i towarzyszących im osprzętów. Wraz z wprowadzeniem nowych technologii w budownictwie pojawiły się nowe rozwiązania instalacyjne, lepiej spełniające wymagania im stawiane (bezpieczeństwo, estetyka). Stosuje się dwa sposoby układania przewodów jednożyłowych w rurkach na i pod tynkiem, oraz układ przewodów wielożyłowych po powierzchni.Układanie jednożyłowych przewodów w rurkach- umożliwia łatwą wymianę przewodów w razie ich uszkodzenia, a nawet wymianę przewodów o większym przekroju w razie zmiany obciążenia. Są one chronione od uszkodzeń mechanicznych. Wady: duże wahania temperatury wewnątrz rurek, kondensacja pary wodnej, duży koszt, duża powierzchnia zajmowania przez trasę przewodów. Przewodu w rurkach nie powinny być okładane w miejscach o dużej wilgotności (rosienie).Układanie wielożyłowych przewodów kablowych po wierzchu- wykonane szczelnie pozwalają do układania ich w miejscu o dużej wilgotności. W innych warunkach są one chętnie układane gdyż zajmują mniej miejsca niż w rurkach i układanie ich jest łatwiejsze. Wady: brak estetyki (piwnice, garaże).Te dwa sposoby układania kabli z czasem przestały wystarczać. Dzięki postępowi kultury rewolucjonizuje się budownictwo powstał nowy sposób montażu instalacji elektrycznych instalacje wtynkowe polegający na układaniu przewodów bezpośrednio na ścianach, bez bruzd i wgłębień, i przykrywania ich warstwą tynku. Jeżeli trasy przewodów nie są narzucone to przy wyborze ich trzeba uwzględnić zasady: przewody, rurki i listwy układa się tylko wzdłuż linii pionowych i poziomych :
łączenia długość użytych przewodów powinna być możliwie mała :przejść przez ściany i stropy powinno być jak najmniej, a przewody w tych przejściach powinny być w rurkach :nie należy układać przewodów na ciągach kominowych, wzdłuż rur ogrzewniczych i na innych nagrzanych powierzchniach od wypustów sufitowych nie należy odgałęziać przewodów od innych odbiorników
6 Działanie prądu na organizm ludzki Prąd elektryczny przepływający przez ciało człowieka wywołuje w nim zmiany chemiczne i biologiczne groźne dla zdrowia życia. Niebezpieczeństwo porażenia prądem zależy od: natężenia, czasu rażenia, wartości częstotliwości. Najniebezpieczniejsze są prądy o częstotliwości sieciowej 50¸60Hz. Rezystancja wewnętrzna organizmu wynosi od 500Ώ do 1000Ώ. Rezystancja skóry przy suchym naskórku wynosi od 5Ώ do 100 kΏ. I zmienia się pod wpływem, czasu rażenia i wzrostu napięcia.
Efekty oddziaływania przez dłuższy czas prądu przemiennego o częstotliwości 50Hz. Na organizm ludzki: 0,5mA- barak reakcji organizmu, 1mA- próg odczuwalności, od 1 od 3mA- odczuwanie bezbolesne, od 3 do 10mA- odczuwanie bolesne, 10mA- początek skurczów mięśni, 30mA- początek paraliżu dróg oddechowych, 75mA- początek migotania komór, 250mA- migotanie komór serca, 4A- paraliż i zatrzymanie pracy serca, ponad 5A- zwęglenie tkanek.
Pierwsza pomoc
Skutki porażenia prądem są tym groźniejsze, im większą powierzchnię ciała objęło porażenie. Gdy już dojdzie do porażenia prądem, szansę na uratowanie życia ludzkiego zależą od sprawności i szybkości osoby ratującej. Pierwszą czynnością jest natychmiastowe wyłączenie prądu i jak najszybsze przystąpienie do ratowania, ponieważ w pierwszej minucie istnieje 98% szansy na to że człowiek zostanie uratowany, gdy już po 8minutach szansa ta maleje do 5%. Następnie jeżeli jest możliwość, trzeba usunąć porażonego spod działania prądu, zabezpieczając go równocześnie przed ewentualnym upadkiem, cały czas pamiętając o tym, że ratujący musi być dobrze odizolowany w takim samym stopniu od ziemi co od porażonego. Należy zachować szczególną ostrożność przy dotykaniu gołych części przyrządów, oraz ciała porażonego. Jeśli porażony stracił przytomność natychmiast powinno zastosować się sztuczne oddychanie. Ważne jest też to, aby nie wlewać mu nic do ust , lecz okryć go ciepło i skierować go do szpitala.
7Rozłączniki Rozłącznik bezpiecznikowy typu RBK składa się z następujących głównych zespołów: podstawy 3-biegunowej wyposażonej w styki szczękowe sprężynowane i tory prądowe osłony styków górnych z komorami łukowymi i osłony styków dolnych, odejmowanej pokrywy mocowanej obrotowo i mieszczącej wkładki topikowe.
Do styków szczękowych można przyłączyć szyny, kable i kable z końcówką. W celu połączenia rozłączników z szynami zbiorczymi rozdzielnicy tory prądowe aparatów wyposażone są w zaciski szynowe (RBK 00-C/S i RBK 00-S), zaś rozłączniki RBK 1-S, RBK 2-S i RBK 3-S łączy się z szynami poprzez płytę izolacyjną.
Załączanie i wyłączanie rozłączników dokonuje się na zasadzie obrotu pokrywy między położeniem zamkniętym a otwartym o kąt 70°. Rozłączniki mają napęd ręczny zależny i dlatego operacje łączeniowe powinny być dokonywane ruchem płynnym i zdecydowanym. Wymiany wkładek topikowych - ze względów bezpieczeństwa - zaleca się dokonywać po odjęciu mocowanej zaczepowo pokrywy. Po wyjęciu wkładek topikowych rozłącznik spełnia wymagania jak dla odłącznika izolacyjnego z widoczną przerwą, dodatkowo rozłączniki RBK 00-C oraz RBK 00 mają możliwość oplombowania pokrywy - te dwie cechy sprawiają, że aparaty te z powodzeniem można stosować w złączach kablowo pomiarowych jako zabezpieczenie przelicznikowe
21 Rodzaje i przyczyny zwearc w liniach elektroenergetycznychZwarcie jest to zakłócenie polegające na połączeniu przez bardzo małą impedancję dwóch lub więcej punktów obwodu, które w normalnych warunkach mają różne Rozróżnia się następujące rodzaje zwarć zwarcia międzyprzewodowe trójfazowe i dwufazowe: zwarcia doziemne czyli zwarcia między fazą lub fazami obwodu a ziemią trójfazowe, dwufazowe i jednofazowe.Przyczyny i skutki zwarćZwarcia powstają na skutek: przepięć atmosferycznych i łączeniowych; błędnych operacji w stacjach elektroenergetycznych; mechanicznych uszkodzeń kabli, słupów, izolatorów; zawilgocenia lub zniszczenia izolacji; uszkodzeni słupów linii napowietrznych; dotknięcia dźwigów, gałęzi drzew, ludzi i zwierząt; zarzutek na przewody gołe
20 Izolatory Zadaniem izolatorów jest zapewnienie izolacji między częściami sieci, które są pod napięciem a konstrukcjami wsporczymi oraz między przewodami różnych odcinków zasilania.Tradycyjnym materiałem z których są wykonane izolatory jest porcelana elektrotechniczna. W ostatnich latach coraz częściej zastępuje się ją tworzywami sztucznymi. Tworzywa te pozwalają konstruować o wielokrotnie obniżonej masie, w porównaniu z izolatorami ceramicznymi, bardziej wytrzymałe mechanicznie oraz odporne na działanie łuku elektrycznego. W normalnych warunkach roboczych izolatory sieci trakcyjnej są pod działaniem napięcia międzyprzewodowego, wartość którego w systemie 3kV nie przekracza 3,8kV. Surowcami wchodzącymi w skład masy ceramicznej, z której są wykonane izolatory porcelanowe, są: kaolin wysokoplastyczny, krzemionka, skaleń. Zawartość poszczególnych składników, ich jakość i grubość ziaren mają zasadniczy wpływ na właściwości porcelany. Zewnętrzne powierzchnie czerepu izolatorów pokryte są błyszczącym gładkim szkliwem koloru brązowego. Szkliwo utrudnia gromadzenie się zanieczyszczeń powierzchniowych oraz ułatwia ich usuwanie. Na okucia izolatorów porcelanowych stosowane jest żeliwo ciągliwe białe (kołpaki) oraz stal. Okucia są zabezpieczone przed korozją przez ocynkowanie w płynnym cynku. Połączenia porcelany z okuciami wykonuje się za pomocą spoiwa siarkowego lub cementowego (w starszych konstrukcjach), stanowiącego mieszaninę cementu portlandzkiego z grysem porcelanowym.Do budowy izolatorów z tworzyw sztucznych wykorzystywane są laminaty szkłoepoksydowe (włókno szklane nasycone żywicą epoksydową) oraz kompozycje lanych żywic epoksydowych z wypełnieniem mineralnym. W kablu poszczególne żyły przewodnika muszą być oddzielone od siebie izolatorem. Właściwości fizyczne i elektryczne izolatora, sposób konstrukcji i jakość wykonania mają wpływ na ogólne właściwości kabla.
Ważnym parametrem izolatora jest jego przenikalność elektryczna. Jest to liczba wskazująca ile razy osłabnie pole elektryczne w danym dielektryku, pochodzące od jakichkolwiek ładunków, w porównaniu z polem od tych samych ładunków po usunięciu dielektryka. Za wzorzec przyjęto próżnię, gdzie jej przenikalność wynosi 1.
Przenikalność dielektryka ma mniejsze znaczenie w kablach głośnikowych, natomiast jest ważna w interkonektach, ze względu na niewielkie prądy przesyłane, które następnie są wzmacniane we wzmacniaczu
8 Ochrona przeciwprzepięciowa Przepięcie jest to krótkotrwały wzrost napięcia w sieci zasilającej, który może być spowodowany między innymi bezpośrednim uderzeniem pioruna w tą samą sieć nawet w znacznej odległości od naszego domu. Tradycyjne urządzenia stosowane w gospodarstwach (np. żarówki, świetlówki, pralki, lodówki) nie są wrażliwe na takie przepięcia i nie wpływa to na ich pracę. Jednak w domach i w biurach używamy coraz więcej nowoczesnych urządzeń (np. faksy, komputery, telefony, urządzenia muzyczne), które są narażone na krótkotrwały wzrost napięcia. Sposobem na ochronę tych urządzeń jest stosowanie ochrony przepięciowej.
Sieć elektryczna wyposażona jest w urządzenia zmniejszające wielkość przepięcia - odgromniki, które są pierwszym stopniem ochrony przeciwprzepięciowej. Dodatkowo w nowoprojektowanych i wykonywanych instalacjach w budynkach instalowane są ograniczniki przepięć, które są drugim stopniem ochrony przeciwprzepięciowej. Trzecim stopniem ochrony przeciwprzepięciowej, który warto zastosować w domu jest ogranicznik przepięcia montowany w puszce instalacyjnej, bezpośrednio w gniazdku lub wkładany do gniazdka wtykowego podobnie jak rozdzielacz
9 Ochrona przeciwporażeniowa Instalacje elektryczne mogą stanowić źródło zagrożeń życia i zdrowia. Skutkami tych zagrożeń mogą być: porażenia prądem elektrycznym, pożaru, oparzenia skóry oraz olśnienia oczu wywołanego łukiem powstającym przy zwarciu elektrycznym, zatrucia w wyniku zastosowania w instalacjach i urządzeniach elektrycznych szkodliwych materiałów. Do instalacji stwarzających największe zagrożenie można zaliczyć instalacje elektroenergetyczne. Źródłem zagrożenia może być również wyposażenie elektryczne maszyn. Niebezpieczeństwo porażenia prądem elektrycznym występuje we wszystkich urządzeniach elektrycznych, których napięcia robocze przekraczają wartości napięć bezpiecznych. W takich przypadkach jest konieczne zastosowanie odpowiednich środków technicznych ochrony przeciwporażeniowej. Podstawowe środki ochrony przeciwporażeniowej to te, które uniemożliwiają bezpośrednie zetknięcie człowieka z będącymi pod napięciem częściami obwodów elektrycznych, a tym samym nie dopuszczają do przepływu przez ciało człowieka prądu rażeniowego. Zabezpieczają one również przed porażeniem człowieka wskutek dotyku do urządzenia, na którego przewodzących elementach (np. obudowa) nie stanowiących części obwodu elektrycznego może pojawić się napięcie dotykowe (powstałe np. wskutek uszkodzenia izolacji). Z punktu widzenia ochrony przeciwporażeniowej urządzenia elektryczne - zgodnie z normą PN-E-05031 dzieli się na cztery klasy: 0, I, II i III. Środki ochrony indywidualnej mogą stanowić samodzielne zabezpieczenie (stosowane przez uprawnionych elektryków) w przypadku pracy z urządzeniami o napięciu prądu do 1 kV. Powyżej 1 kV środki ochrony indywidualnej mogą być stosowane jedynie jako sprzęt pomocniczy. Do środków ochrony indywidualnej chroniących przed porażeniem prądem elektrycznym można zaliczyć: rękawice ochronne; odzież ochronną; obuwie ochronne środki ochrony oczu i twarzy.
Aby maszyna pracowała ja prądnica? :Trzeba dostarczyć mocy biernej o stałej f.
Cewka średnicowa ma rozpiętość: Podziałki biegunowej.
Co określa(R2'/Xs)?: Straty w miedzi
Co powoduje przepływ?: Powstanie SEM w uzwojeniu, powstanie pola wirującego.
Cos(ϕ) biegu jałowego: (0.2-0.3)
Dla maszyn s=(+-)1 moment jest min: Dla pracy hamulcowej.
Dla p=3 prędkość silnika: 950
Dla silników pierścieniowych można stosować: Ed i R włączone w wirnik.
Gdzie powstają większe straty przy obc znamion: w uzwoj
Głęboko żłobkowa maszyna to taka gdzie: Rowki wchodzą promieniowo w wirnik.
Jakie uzwojenie ma kg=1, ks=1: średnicowe
Jeżeli silnik pracuje w stanie obciążenia znamionowego to ile wynosi f : f2=1.5MHz, bo Sr=0.03=3%, f2=s*f1=0.03*50Hz
Jaki sil nazywamy dwuuzwojeniowym: pierścieniowy 2-bieg, wielobiegowy 2-bieg
Jeżeli sil pracuje w stanie obniżenia znamion, to ile wynosi f: F2=1,5Hz, bo Sr=3%, f=s*f1=0.03*50Hz
Jeżeli obniżymy napięcie zasilania: Rosną straty, maleje prędkość.
Jeżeli transformator obciążymy znamionowo silnikiem asynchronicznym: (L,1=const, to napięcie na jego zaciskach będzie max.): Przy obciążeniu ich znamionowo.
Max. moment pola wirującego jest dla poślizgu: 0.25
Maszyny asynchroniczne to najczęściej : Silniki.
Maszyna asynchr może pracować jako prądnica: jeżeli jest podłącz do sieci 3-faz, poślizg<0
Moc pola wirowego to: Moc czynna przekazywana ze stopnia stojana.
Moc znamionowa to: Pn=M*ω
Moment elektromagnetyczny. Zależy od: Siły działającej na uzwojenie prostopadłe do promienia i średnicy wirnika.
Moment elektromagnetyczny zależy od: Prędkości kątowej pola wirującego i mocy.
Moment elektromagnetyczny zależy: Od poślizgu.
Moment elektromagnetyczny: To siła działająca prostopadle do średnicy wirnika* średnica twornika.
Moment elektromagnet silnika zależy od: prądu??? Objętości maszyny i chłodzenia
Moment elektromagnet=użytecznemu moment naped: przy pracy silnik i ustabilizowanej V obr
Moment elektromagnet może być: oporowy lub napędowy, zależy od stanu pracy
Od czego zależy strum elektromagnet: od bud masz, pr twornika, strum wzbudzenia
Parametry X,R wyznacza się z: Próby zwarcia i biegu jałowego.
Podziałka biegunowa: Mierzona po obwodzie twornika między sąsiednimi biegunami.
Poączenie gwiazda-trójkąt przy rozruchu stosuje się do: Silnik do pracy znamion w trójkącie.
32 Poślizg względny w maszynie asynchronicznej wynosi: 3%.
33 Poślizg przy obciążeniu znamionowym wynosi: 2-5%.
34. Poślizg w maszyn asynchr to: różnica prędk pola wirującego i wirnika
35. Po co jest kondensator: dla zwiększania momętu rozruchowego
36. Prąd biegu jałowego wynosi: I10=0.2-0.5 In.
Prądnica asynchr jest: źr mocy czynnej
37. Prędkość prądnicy asynchronicznej o liczbie par biegunów 3: 1050.
38. Prędkość prądnicy synchr i sil asynchr podłącz do tej samej sieci jest: różna
39. Prędkość pola wirującego=przepływowi w wirniku: dla prędkości synchronicznej.
40. Prędkości pól wirujących w uzwojeniu stojana i przepływu wirnika są: Takie same
41. Prędk wirowania pola zależy od: częstot i licz par biegunów
42. Przekroczenie poślizgu krytycznego powoduje: Zatrzymanie- utyk.
43. Przepływ wypadkowy 3 faz jest równy: 3/2.
44. Przy regulacji prędkości f: Napięcie musi maleć.
45. Przyspieszenie rozruchu silnika zależy od: J, Mop, Mnap.
46.Punkty do wykresu kołow wyznacza się z: próby zwarcia i biegu jał
47. Regulację prędkości poprzez zmianę liczby par biegunów uzyskuje się: Skokowo, bez strat.
48. Regulację V obr przeprowadza się poprzez zmianę : p, f i poślizgu.
49.Rozruch sil przy obniżonym nap zasil stosuje się w: Silnikach klatkowych dużej mocy.
50. SEM transformacji wytwarzana jest przez: Zmianę strum sprzężonego z uzwojeniem w czasie.
51. Silnik asynchroniczny z sieci pobiera: Moc bierną (i stabilizującej częstotliwości) oddaje czynną pojemnościową.
52. Stosowanie silników klatkowych powoduje: Zmniejszenie prądu rozruchowego i zwiększenie momentu.
53. Sprawność silnika 10kW: 90%.
54. Uzwoj stojan mogą być połącz: Szer lub równol
55. Uzwoj stojan może być: Jedno lub dwuwarst
56.Warunki pola kołowego wirującego: min 2 fazy.
57. Warunkiem powstawania wirującego pola magnetycznego są:Zasilanie 3- fazowym napięciem faz przesuniętych o 120°.
58. Włączenie rezystancji w obwód wirnika powoduje: Zmniejszenie prądu rozruchowego i zwiększenie momentu rozruchowego.
59. Włączenie Ed w obwód wirnika powoduje: możliwość regulacji pręd obrotowej
60. W silniku asynchr SEM rotacji indukuje się: zmiana strum wzgl uzwoj
61. W uzwoj średnic: SEM dodajemy (sumujemy artymrt)
62. Współcz gr.: stosunek Eg do sumy arytmetycznej SEM zezwojeń
63.Wykres koł przedst: zależność poślizgu
64. Wzór na V obrot: n=(60f/p)*(1-s)
65. Wzór na Ef: =4'44*Ku*z*f*fi
66. W jakiel masz stosuje się zmiane liczby par biegunów?: klatkowej
67. Z jakiej próby wyznacza się Rfe i Xmi: bieg jał
68. Zmiana licz par biebunów: tylko w klatkowych
69. Zmiana częstotliwości powoduje: konieczność zmiany nap zasil
70. Zwiększanie f powoduje zmanę: V synchr
71. Źr SEM rotacji jest: wiruj pole magnet
72. Źr mocy czynnej jest: prądnica asynchr
Jeżeli y1=τp to: cewka jest średnicowa, wzbudzone SEM jest max
Jeżeli y1≠τp to: uzwoj jest skrócone, SEM sumują się arytmetycznie
Skrócenie stosujemy po to: aby eliminować SEM wyższych harmonicznych
Uzwoj pętlic: powoduje zmniejszenie SEM wypadkowe, kg=Eg/(g Ez)
Uzwoj faliste: SEM jest max, kg=1, ks=1
Gwiazda napięć to: wykres wskazowy SEM wszystkich boków czynnych
Prędk ustalona jest: zawsze mniejsza odprędk pola wirującego
Hamulec: wirnik porusza się z prędk przeciną do ns (s>1)
Prądnica: wirnik poruszał się z prędkością większą od synchronicznej n>ns
Stan pracy S.A. s=1: początek rozruchu, I1r/I1n=4÷9 (rozruch ciężki 2,0)
Stan pracy S.A. s=0: idealny bieg jał, I10/I1n=0,2÷05 (silnik wolnoobrot 1,0)
Aby przeprowadzić synchronizację należy bezwzględnie zapewnić - taką samą kolejność faz napięcia.
Charakterystyka zew. prądnicy synchr. jest - opadająca lub rosnąca.
Czas trwania stanów nieustalonych po zmianie strumienia wynosi - 1,2 - 2s.
Częstlotliwość SEM wzbudzonej w tworniku maszyny synchr. zależy od - prędkości kątowej i str wzb.
Ilość biegunów stojana maszyny synchr. jest - taka sama jak wirnika.
Jaka jest sprawność maszyn el średniej mocy - 80-90%.
Jeżeli prądnicę synchr. obciążymy elementem RC to aby U,f=const trzeba - zmniejszyć prąd wzbudzenia.
Kąt grzniczny dla prądnic turbinowych jest równy - 90o .
Kąt mocy w masz. synchr. to - kąt pomiędzy osią magneśnicy, a polem wypadkowym.
Kompensator synchroniczny to - silnik synchroniczny biegnący jałowo.
Maszyna synchr. może oddawać moc czynną - przy prądzie wzbudzenia różnym od zera.
Maszyna synchr. połączona z siecią sztywną wypada z synchronizmu przy mocy czynnej - zależnie od prądu wzbudzenia.
Maszyna synchr. reluktancyjna jest - źródłem mocy czynnej i biernej indukcyjnej.
Maszyny synchroniczne występują najczęściej jako - prądnice.
Moc bierną prądnicy przyłączonej do sieci sztywnej reguluje się - prądem wzbudzenia.
Moment dyn. w maszynie cylindrycznej opisuje wzór -
Oporność wewnętrzna prądnicy synchr. zależy od - reakrancji rozproszenia.
Po obciążeniu prądnicy odbiornikiem RL, aby stałe U i f trzeba - zwiększyć prąd wzbudzenia.
Poprzeczna reakcja twornika w maszynie synchr. jest źródłem - momentu na wale.
Prąd i SEM wypadkowa EW w uzwojeniu fazowym twornika maszyny synchr. obciązonej symetrycznie są - przesunięte o kąt zależny od charakteru obciążenia.
Prąd prądnicowy popłynie przy - za małej częstotliwości prądnicy w stosunku do sieci.
Prąd zwarcia prądnicy synchr - zależy od prędkości kątowej gdy zbliża się ona do zera.
Prąd wzb prądnicy synchr. w czasie pracy samotnej zależy od - stanu obciążenia
Prądnica synchr. może być - obcowzbudna lub z regulatorem nap.
Prądnice synchr. dzielą się na - jawnobiegunowe i turbinowe.
Prędkość pól wirujących w uzwojeniu stojana i przepływu wirnika są - takie same.
Prędkość maszyny synchr. typu cylindrycznego wynosi - 3000 lub 3600 obr/min. ?
Prędkośc obrotowa maszyny synchr. zależy od - liczby par biegunów i częstotliwości sieci (nap. zas. i obciązenia).
Prędkość pola wirującoego równa się przepływowi w wirniku - dla prędkości synchronicznej.
Prędkośc prądnicy synchr. i silnika asynchr. podł. do tej samej sieci jest - różna.
Regulację prędkości m. synchr.
Różnica przesunięcia w fazie nap sieci i prądnicy powoduje - przepływ prądu czynnego.
SEM wzb w prądnicy biegnącej jałowo zależy od - strumienia wzb i prędkości kątowej.
Silnik reluktancyjny może pracować jako prądnica - musi mieć sieć 3-fazową, która dostarczy mocy czynnej.
Uzw. stojana mogą być poł - w gwiazdę lub trójkąt lub z.
Uzw twornika m. synchr wykonuje się na parę biegunów - taką samą jak wirnika.
Uzw twornika m. synchr jest - 3-fazowe ułożone w żłobkach stojana, połączone w gwiazdę.
Wartość stosunku prądnicy synchr wynosi - Kz=Imo/Imz.
W jakiej m synchr występuje M reluktancyjny - w jawnobiegunowej.
W m synchr jawnobiegunowej stosunek Xd/Xl jest - zależny od obciążenia.
W m synchrpracującej smotnie można regulować moc bierną przy zachowaniu U,f=const - przez łączenie odbiorników i zmianę prądu wzbudzenia.
W m synchr typu jawnobiegunowego graniczny kąt mocy wynosi - mniejszy od 90o.
W m synchr typu turbo znamionowy kąt mocy jest - ok. 90o.
W pierwszej chwili po zmianie prądu twornika reakcja wewnętrzna m synchr jest - ok. 2 razy mniejsza jak w stanie ustalonym.
Warunkiem pracy prądnicowej m synchr jest - dostarczenie mocy biernej i stabilizacja częstotliwości.
Warunkiem pracy silnikowej m synchr jest - synchronizacja z siecią i obciążenie momentem.
Warunkiem samowzbudzenia prądnicyusynchr jest - odpowiednie poł uzw wzbudzenia, rezystancja wzb nie może być za duża (Robc<Rkr) i istnienie szczątkowego.
Warunkiem pracy kompensatorowej m synchr jest - zasilanie uzwojenia wzb odp prądem.
Wirnik m synchr jest - żłobkowany (typu turbo) i z wystającymi biegunami (jawnobiegumowa).
Wzdłóżna reakcja twornika powoduje - zmniejszenieSEm fazowego.
Znamionowy kąt mocy m jawnobiegunowej to - więcej niż 45o.
Zwiększenie częstotliwości powoduje zmianę - prędkości synchronicznej.
Cha. zwarcia jest - liniowa.
Cha. zew. prądnicy to zależność - U=f(I) przy cos , f, = const.
Prąd i SEM wzbudzenia E0 w uzmojeniu fazowym twornika są - zależne od obciążenia.
Reakcja reakcji twornika to - stosunek SEM wzbudzenia przez strumień reakcji twornika do prądu twor.
Stosunek zwarcia to - Kz = Imo/Inz.
Ustabilizowany prąd zwarcia biegu jałowego jest - mniejszy od znamionowego.
Uzw wzb prądnicy turbinowej są - skupione.
Maszyny asynchroniczne to najczęściej
(silniki)
SEM transformacji wytwarzana jest przez
(zmianę strumienia sprzężonego z uzwojeniem w czasie
źródłem sem rotacji jest
(wirujące pole magnetyczne)
Uzwojenia stojana mogą być połączone
(szeregowo lub równolegle)
Prędkości pól wirujących w uzwojeniu stojana i przepływu wirnika są:
Takie same
Moc znamionowa to
(Pn= Mn*ωn)
Jeżeli silnik pracuje w stanie obciążenia znamionowego to ile wynosi f
(f2= 1,5MHz, bo Sn=0,03=3%, f2= s*f1=0,03*50Hz
Moment elektromagnet. Zależy od
Siły działającej na uzwojenie prostopadle do promienia i średnicy wirnika
Zwiększenie czestsotliwości powoduje zmianę
(prędkości synchronicznej)
Włączenie rezystancji w obwód wirnika powoduje
Zmniejszenie prądu rozruch i zwiększenie momentu rozruchowego
Włączenie Ed w obwód wirnika powoduje
Możliwość regulacji pred. obrotow.
Stosowanie silników klatkowych powoduje
Zmniejszenie prądu rozruchowego i zwiększenie momentu
Rozruch silnika przy obniżonym napięciu zasilania stosuje się w
sil. Klatkowych dużej mocy
Moment elektromagnetyczny zależy od
Prędkości kątowej pola wirującego i mocy
Moment elektromagnetyczny zależy od poślizgu,
Prąd biegu jałowego wynosi
I10= 0,2-0,5In
Warunkiem powstawania wirującego pola magnetycznego są:
Zasilanie 3-fazowym napięciem faz przesuniętych o 1200
Regulacje pred. Obrotowej przeprowadza się poprzez zmianę
(p,f i poślizgu)
W jaki sposób powstaje wirujące pole w maszynach asynchronicznych
Aby maszyna pracowała jak prądnica?-
Trzeba dostarczyć mocy biernej o stałej f
Warunki pola kołowego wirującego -
minimum 2 fazy
Podziałka biegunowa -
mierzona po obwodzie twornika miedzy sąsiednimi biegunami
Max. Moment pola wirującego jest dla poślizgu-
0,25
Dla silników pierścieniowych można stosować -
Ed i R włączone w wirnik
Współczynnik grupy-
stosunek Eg do sumy arytmetycznej sem zezwojow
Dla p=3 prędkość silnika=
950
Uzwojenie stojana może być-
(jednowarstwowe, dwuwarstwowe)
Przyspieszenie rozruchu silnika zależy od
(J,Moper,Mnaped)
Dla maszyn s= (+-)1 moment jest minimalny
dla pracy hamulcowej?
Wykres kołowy przedstawia-
zależności poślizgów
Z jakiej próby wyznacza się Rfe i Xmi-
biegu jałowego
Przy regulacji prędkości f- napięcie musi maleć
W jakiej maszynie stosuje się zmianę liczby par biegunów-
klatkowy
Głęboko żłobkowa maszyna to taka gdzie
rowki wchodzą promieniowo w wirnik
Prędkość pola wirującego =
przepływowi w wirniku- dla prędkości synchronicznej
Moc bierna pobierana na wytworzenie Bmax zależy od
Co określa(R2'/Xs)-
straty w miedzi
W silniku asynchronicznym sem rotacji indukuje się - zmiana strumienia wzgl. Uzwojenia
Od czego zależy moment max.
Od czego zależy mom. Elektromagnetyczny
Cos(fi) biegu jałowego- (0,2-0,3)
Jeżeli transformator obciążymy znamionowo silnikiem asynchronicz. (I1=const, to napięcie na jego zaciskach będzie max.)- przy obciążeniu ich znamionowo
Wzór na V obrotowa- n=(60f/p)*(1-s)
Silnik asynchr. Z sieci pobiera-
moc czynna i oddaje bierna pojemnościowa
Zmiana liczby par biegunów-
tylko w klatkowych
Jeżeli obniżymy napięcie zasilania -
rosną straty, maleje -prędkość
W uzwojeniu średnicowym -
sem dodajemy(sumuje się arytmetycznie)
Wzór na Ef=4,44*Ku*z*f*fi
Momen elektr.
To siła działająca prostopadle do średnicy wirnika * promień twornika
Co powoduje przepływ-
powstanie sem w uzwojeniu,powstanie pola wirującego
Poślizg przy obciążeniu znamionowym wynosi- 2-5%
Maszyny synchroniczne występują najczęściej jako
(prądnice)
Prądnice synchroniczne dzielą się na
( jawnob. I turbinowe)
Warunkiem samowzbudzenia jest odpowiednia
( V obrotowa)
Sem wzbudzenia w prądnicy biegnącej jałowo zależy od
(strumienia wzbudzenia i pred. Kątowej)
Kąt graniczny dla prądnic turbinowych jest równy (900
Po obciążeniu prądnicy odbiornikiem RL, aby utrzymać stale U i f trzeba
(zwiększyć prąd wzbudzenia)
Moc bierna prądnicy przyłączonej do sieci sztywnej reguluje się
(prądem wzbudzenia)
Uzwojenia wzbudzenia prądnicy turbinowej są
(skupione)
Charakterystyka zwarcia jest
(liniowa)
Cha-ka zewnetrz. Prądnicy to zależność
(U=f(I) przy cos fi, f, w= const)
Prąd pradnicowy popłynie przy
( za małej częstotliwości prądnicy w stosunku do sieci)
Oporność wewnętrzna prądnicy synchronicznej zależy od (reaktancji rozproszenia
Maszyny asynchroniczne:
Przepływ wypadkowy 3 faz jest równy
3/2
Moc pola wirowego to
Moc czynna przekazywana ze stojana do wirnika
Prędkość prądnicy asynchronicznej o liczbie par biegunów 3:
1050
Połączenie gwiazda - trójkąt przy rozruchu stosuje się do:
Silników do pracy znamionowej w trójkąt
Przekroczenie poślizgu krytycznego powoduje:
Zatrzymanie - utyk
Poślizg względny w maszynie asynchronicznej wynosi:
3%
Regulację prędkości poprzez zmianę liczby par biegunów uzyskuję się
Skokowo
Zmiana częstotliwości powoduje
Proporcjonalny wzrost strat
Moment elektromagnetyczny może być:
Oporowy lub napędowy, zależy od stanu pracy
Maszyny asynchroniczne to najczęściej
Silniki
SEM transformacji wytwarzana jest przez
Zmianę strumienia sprzężonego z uzwojeniem w czasie
Źródłem sem rotacji jest
Wirujące pole magnetyczne
Uzwojenia stojana mogą być połączone
Szeregowo lub równolegle
Prędkości pól wirujących w uzwojeniu stojana i przepływu wirnika są:
Takie same
Moc znamionowa to
Pn= Mn*ωn
Jeżeli silnik pracuje w stanie obciążenia znamionowego to ile wynosi f
f2= 1,5MHz, bo Sn=0,03=3%, f2= s*f1=0,03*50Hz
Moment elektromagnet. Zależy od
Siły działającej na uzwojenie prostopadle do promienia i średnicy wirnika
Zwiększenie czestsotliwości powoduje zmianę
Prędkości synchronicznej
Włączenie rezystancji w obwód wirnika powoduje
Zmniejszenie prądu rozruch i zwiększenie momentu rozruchowego
Włączenie Ed w obwód wirnika powoduje
Możliwość regulacji pred. obrotow.
Stosowanie silników klatkowych powoduje
Zmniejszenie prądu rozruchowego i zwiększenie momentu
Rozruch silnika przy obniżonym napięciu zasilania stosuje się w
Sil. Klatkowych dużej mocy
Moment elektromagnetyczny zależy od
Prędkości kątowej pola wirującego i mocy
Moment elektromagnetyczny zależy
Od poślizgu,
Prąd biegu jałowego wynosi
I10= 0,2-0,5In
Warunkiem powstawania wirującego pola magnetycznego są:
Zasilanie 3-fazowym napięciem faz przesuniętych o 1200
Regulacje pred. Obrotowej przeprowadza się poprzez zmianę
p,f i poślizgu
Aby maszyna pracowała jak prądnica?
Trzeba dostarczyć mocy biernej o stałej f
Warunki pola kołowego wirującego
Minimum 2 fazy
Podziałka biegunowa
Mierzona po obwodzie twornika miedzy sąsiednimi biegunami
Max. Moment pola wirującego jest dla poślizgu
0,25
Dla silników pierścieniowych można stosować
Ed i R włączone w wirnik
Współczynnik grupy-
Stosunek Eg do sumy arytmetycznej sem zezwojow
Dla p=3 prędkość silnika
950
Uzwojenie stojana może być
Jednowarstwowe, dwuwarstwowe
Przyspieszenie rozruchu silnika zależy od
J,Mop,Mnap
Dla maszyn s= (+-)1 moment jest minimalny
Dla pracy hamulcowej
Wykres kołowy przedstawia
Zależności poślizgów
Z jakiej próby wyznacza się Rfe i Xmi
Biegu jałowego
Przy regulacji prędkości f
Napięcie musi maleć
W jakiej maszynie stosuje się zmianę liczby par biegunów
Klatkowy
Głęboko żłobkowa maszyna to taka gdzie
Rowki wchodzą promieniowo w wirnik
Prędkość pola wirującego =
Przepływowi w wirniku- dla prędkości synchronicznej
Moc bierna pobierana na wytworzenie Bmax zależy od
Co określa(R2'/Xs)-
Straty w miedzi
W silniku asynchronicznym sem rotacji indukuje się
Zmiana strumienia wzgl. Uzwojenia
Cos(fi) biegu jałowego
(0,2-0,3)
Jeżeli transformator obciążymy znamionowo silnikiem asynchronicz. (I1=const, to napięcie na jego zaciskach będzie max.)
Przy obciążeniu ich znamionowo
Wzór na V obrotowa
n=(60f/p)*(1-s)
Silnik asynchr. Z sieci pobiera
Moc czynna i oddaje bierna pojemnościowa
Zmiana liczby par biegunów
Tylko w klatkowych
Jeżeli obniżymy napięcie zasilania
Rosną straty, maleje -prędkość
W uzwojeniu średnicowym -
Sem dodajemy(sumuje się arytmetycznie)
Wzór na Ef=
4,44*Ku*z*f*fi
Momen elektr.
To siła działająca prostopadle do średnicy wirnika * promień twornika
Co powoduje przepływ
Powstanie sem w uzwojeniu,powstanie pola wirującego
Poślizg przy obciążeniu znamionowym wynosi
2-5%
PRAD STAŁY
Blachy elektrotechn? -Przewodzą strum magnet.
Cechy maszyny pradu stałego - komutator i szczotki
Charakterystyka mechaniczna silnika bocznikowego -
liniowo opadająca
Co jest powodem iskrzenia na szczotkach? -Zbyt duża
gęst pr.
Co powod przesunięcie szczotek poza strefę neutralną -
zbyt duża gęst pr, reakcja twornika!!!.
Co powoduje iskrzenie na szczotkach - zespół zjawisk
wystepujacych przy przeplywie pradu przez komutator
Co to jest podziałka biegunowa - część obwodu twornika
przypadająca na jeden biegun, Odległość między osiami
sąsied.biegunów. łp=πD/2p. lub łp=Ż/2p.
Co to jest silnik? -Elektromaszynowy przetw en elektr na
mech
Co to jest strefa neutralna? Jest to strefa miedzy stojanem
a twornikiem w ktorej ind.=0.
Co to jest strumien szczatkowy? Jest to strumien
wynikajacy z pozostalosci magnet.
Czy maszyna może pracować jako silnik i prądnica - Tak
bezwarunkowo
Czy prądnicę samowzbudną należy zasilać -nie trzeba z
zewn.
Czy ta sama maszyna może pracować jako sil i prądn? -
Tak.
Czy uzwojenie faliste na więcej niż 1 parę gałęzi
biegunów - 1 para ?????
Czy zakres regulacji prędk. obr. przez zmianę napięcia
zależy od obciążenia siln.---nie zależy
Dlaczego przy n=0 prąd twornika jest wielokrotnie
wyższy od znamionowego, a przy n=n0 wielokrotnie
niższy od znamionowego (napiecie zasilajace jest
znamionowe)? Bo przy n=0 także E=0, a przy n=n0
E=Emax.
Dlaczego przy n=0 także E=0 pr twor jest wielokrotnie
wyższy od znamionowego a przy n=n0 wielokrotnie niższy
od znamionowego ? -Bo przy n=0 także n=0, a przy n=n0
E=Eszcz
Do budowy uzwojeń: -Cu i jej stopy oraz Al.
Ferromagnetyki: -Do bud części maszyn elektr.
Gdzie są umieszczone bieguny kompensacyjne -
umieszczone są na biegunach głównych na biegunach
komutacyjnych -pomocnicze
Gdzie są umieszczone bieguny komutacyjne -
umieszczone nad zwojami komutacyjnymi (w strefie
neutralnej ⊥ do biegunów głównych)
Gdzie są większe straty przy obciąż zmiennym? -w
uzwojeniu.
Gdzie się indukuje SEM transformacji -w uzwoj (czasem w
strefie neutralnej wraz z prądem przepływającym w
uzwojeniu pojawia się SEM)
Ile wynosi pr zwarcia w prądnicy samowzbudnej -
10do20In.
Ile wynosi przenikalność w maszynie -kilka tys.
Indukcja reakcji twornika w strefie biegunów głównych
wynosi---Bt=0 (masz.nienasyc.)
Jak dokonujemy rozruchu sil pr st? -zmiana U twor przez
R twor.
Jak indukuje się SEM rotacji SEM indukowana wskutek
wirowania przew. Względem niezmiennego w czasie
pola mag. e=B*l*v E=CE*φ∗n lub E=CE*φ∗ω Reguła
prawej dłoni.
Jak można scharakteryz regul Vobr przez zmianę U zasil?
-Szeroki zakres regulacji, brak strat dodatkowych. Czy zakres regulacji V obr przez zmianę strum zależy od obciąż
sil? -nie, nie zależy.
Jak można scharakteryzować regulację prędkości
obrotowej przez zmianę napięcia zasilającego?
Szeroki zakres regulacji, brak strat dodatkowych.
Jak przebiega charakt. Mechaniczna silnika szereg.-
bocznikowego? Szybciej niż liniowo.
Jak przebiega charakt. Mel od It? Linioowo.
Jak zal moment el-magn od pr twor w sil szeregowym ? -
parabolicznie.
Jak zal SEM wzbudzana w uzw twor od V obr. -Liniowo.
Jak zal strum od .....biegu jałowego -parabolicznie.
Jak zalezy moment elektromagnet. od predkosci
obrotowej? Nie zalezy
Jak zależy mom.elektromag. od prądu wzb.przy stałym
prądzie twornika—dla maszyny nienasyconej liniowo,dla
nasyconej moment narasta wolniej. M=CM*k*Iw*It
Jak zależy moment elektromagn od prądu tworn. w
prądnicy szer-boczn.—Mom. Elektromag Jest wprost
proporc. do do prądu tworn (wzrasta ze wzrostem Iobc)
M.= (E*it)/ωm)
Jak zależy moment elektromagnetyczny od prądu
twornika w silniku szeregowym? Parabolicznie.
Jak zależy moment od prędkości przy stałym prądzie
twornika - liniowo
Jak zależy SEM wzbudzana w uzwojeniu twornika od
prędkości obrotowej? Liniowo.
Jaka jest sprawność maszyn elektrycznych średnich
mocy -- η=85%-90% (98% m.duż.mocy)
Jaka prądn ma mniejsze zmiany U przy obciąż? -
szeregowo-bocznikowa.
Jaka prądnica ma najsztywniejszą char zewn -szer-bocz.
Jaką wart przyjmuje SEM szczątkowa w stos do SEM biegu
jałowego? -Eszcz=0,03E0 (Eszcz=2-5%E0).
Jaką wartość przyjmuje SEM szczątkowa w stosunku do
SEM biegu jałowego? Eszcz=0,03 Eo(Eszcz=2-5%Eo).
Jaką zależność nazywamy char.biegu jał prądnicy
bocznikowej—E(sem)=F(Im) lub F(Iw)
Jaki jest prąd zwarcia ustalonego w prądnicy
obcowzbudnej(n, Iw=const)? Około 20 In.
Jaki jest prąd zwarcia w prądnicy samowzbudnej
bocznikowej(n=const)? Około 0,4In.
Jaki jest stos V obr znamionowej do V biegu jałowego w sil
szer-bocznik ? -n/n0=0,95.
Jaki jest stos. prądu wzbudz. do prądu tworn. w prądnicy
szereg. Im/It=1 (to ten sam prąd)
Jaki jest stos. prądu wzbudz. do prądu twornika w
prądnicy obcowzbud - Im/It ≈ 2%-3%
Jaki jest stosunek prędkości obrotowej znamionowej do
prędkości biegu jałowego w silniku szeregowo-
bocznikowym?nn/n0=0,95.
Jaki sil ma najsztywniejszą char mechaniczną -
bocznikowy.
Jaki silnik ma największy moment rozruchowy -
szeregowy
Jakie cechy ma regul strum -ma niewielki zakres, strum
var=zmienny Me=zmienny jak strum rośnie V maleje.
Jakie sa podstawowe zalety maszyn prądu stałego?
Prosta regulacja prędkości obrotowej i wysoka sprawność.
Jakie uzwoj jest najbardziej szeregowe -faliste.
Jakie uzwojenie twornika w masz.p.s nie ma połączeń
wyrównawczych—uzw.faliste proste.
Jakim napięciem zasilamy uzw. tworn. przy rozruchu
siln.--napięciem regul. od 0 do Un przy Rozruchu
napięciowym. Pełnym napięciem U = Un przy rozruchu
oporowym.
Kompensator: -do mocy biernej.
Kondensator? -Do zwiększ momentu rozruchowego.
Która charakterystyka prądnicy jest najbardziej sztywna
- szeregowo-bocznikowa
Które z regulacji V kątowej sil pr stałego ma największe
zalety? -zmiana U.
Moc rzeczyw. masz. pr. stalego? Zalezy od momentu obrot
i predk. Obrot.
Moc rzeczyw. pranicy p.s. zależy od-- P2(oddana)=U*I lub
Pe (elektryczna) =E*It=ω*M. (P2<Pe) Komutacja to—
zmiana kier. prądu w cewkach tworn. zwartych na
komutat. przez szczotki
Moment bezwładności - mr2
Moment elektromagnetyczny jest rowny uzytecznemu
momentowi napedowego - przy pracy silnikowej.
Moment el-magn jest = użytecznemu momentowi
napędowemu: -przy pracy silnikowej.
Moment napędowy i oporowy - Mn/p=Mel+-Mmech
Od czego zależy strumień magnetyczny? Od liczby
zwojów i natężenia prądu.
Od czego zal SEM w maszynie prądu stałego? -E=CEφn.
Od czego zal strum magn: -od liczby zwojów i natęż pr.
Od czego zal. prędk.obr.wału siln.p.s--napięcia
tworn.(U),prądu wzbudz(Im),rezyst obw tworn
Od czego zalezy ind. magnet.? Od natezenia pola i
przenikalnosci wzglednej.
Od czego zalezy moment elektromagnet? (M=ItΦcM)
Pradu, strumienia, budowy masz.
Od czego zalezy SEM wzbudzenia twornika? Od budowy
maszyny, predkosci i strumienia (E=ΦncE
Od czego zależą główne straty w maszynie obciążonej
znamionowo? -Od prądu i R uzwojeń.
Od czego zależy Mel w maszynie pr st? -Mel=CmφIt.
Od czego zależy moment elektromagnetyczny w
maszynie pradu stalego? Od budowy maszyny, prądu
twornika, strumienia wzbudzenia.
Od czego zależy strum el-magn ? -Od bud maszyny, pr twor,
strum wzbudz.
Pr zwarcia w prądn samowzbud: -ok 0,4In.
Przepływ uzw. Komutacyjnego jest proporc do - prądu
twornika i liczby zwoj. na parę bieg.
Przyczyna iskrzenia na komutatorze jest? Zjawiska
zachodzace podczas komutacji.
Przyczyną komutacji opóźnionej jest: -Zbyt duża gęst pr.
Przyczyną komutacji opóźnionej jest? Zbyt duża gęstość
prądu.
Reluktancja: -oporność magn; stos przepływu do strum
magn.
Reluktancja? oporność magnetyczna, stosunek przepływu
do strumienia magnetycznego.
Rola komutatora: -Prostownik mechaniczny
Równ prądn: -U=E2-ItRt.
Równanie prądnicy? U=E-ItRt.
Równanie silnika - U=E+ItRt
Silnik komutatorowy uniwers. wykonuje się najczęściej
jako - silnik szeregowy jednofazowy
Sposób regulacji V obr sil bocznik: -zmiana U zasilającego
twor.
Stosowane szczotki ? -Grafitowe, węglowe. Pr zwarcia
ustalonego w prądn obcowzbud: -ok 20In.
Udział przepływu szereg we wzbudz prądn szer-
bocznikowej ? -około 0,15.
Udział przepływu szeregowego we wzbudzeniu prądnicy
szeregowo- bocznikowej? Około 0,15.
Uzwojenie pętlicowe proste jest uzwojeniem
zamkniętym? Tak jeden raz.
W jakiej czesci maszyny powstaja najwieksze straty? W
uzwojeniach.
W jakiej części maszyny są największe straty przy biegu
jałowym? W łożyskach i pakiecie blach wirnika i stojana.
W jakiej części maszyny są największe straty przy biegu
jałowym?. W łożyskach, pakiecie blach wir i stojanie. Uzw
pętlicowe, proste jest uzw zamk. -Tak 1 raz.
W jakim sil pr stałego V kątowa mniej zależy od obciąż? -
bocznikowym.
W maszynach pr. Stalego stosujemy szczotki? Grafitowe
lub węglowe.
Wada maszyny pradu stalego jest? Wysoki koszt i
problemy z komutacja.
Warunki samowzbudz. prądnicy bocznik. p.s.—musi
istnieć φ magnetyzmu szczątkowego Prąd w uzw. wzbudz.
musi wzmacniać strumień szczątkowy , rezystancja obw.
Wzbudz. Musi być mniejsza od rezystancji krytycznej
(nachyl.char biegu jał.w punkcie początk.)
Zakres regulacji prędkości obrotowej przez zmianę
strumienia zależy od obciążenia silnika? Nie, nie
zależy.
Zalety maszyn pr st: -prosta regulacja V obr, wysoka spraw.
Zwarcie w sil pr st? -(10-20)In.
TRANSFORMATORY
Autotran. trojfaz. o przekladni zwojowej =1 - nie jest
stosowany.
Autotran. trzyfaz. może - obnizyc i podwyzszyc nap.
Autotransformator 3-fazowy może: Obniżać i podwyższać
napięcie.
Autotransformator 3-fazowy o przekładni zwojowej
równej 1: Jest stosowany w laboratoriach.
Blachy rdzenia 3-fazowego: Izoluje się od siebie.
Blachy rdzenia tran. trzyfaz. Wycina się z ferromagnetyka
- o waskiej petli histerezy.
Blachy rdzenia transformatora 3-fazowego wycina się z
ferromagnetyka o: Wąskiej pętli histerezy.
Blachy rdzenia trzyfaz. - izoluje się od siebie.
Co zapewnia równość mocy 2 transf.? Równość napięć
zwarcia.
Czym jest spowodowana 3 harmoniczna? Nieliniową char
magnesowania.
Czym jest spowodowana składowa bierna prądem b.
jałowego? Magnesowania rdzenia.???
Dlaczego rdzen tran. sklada się z blach elektrotech. - ze
względu na przemienny strumien magnet.
Dlaczego rdzen z transf. sklada się z blach na zakladce -
w celu ograniczenia szczeliny powietrznej.
Dlaczego rdzeń transformatora składa się z blach
elektrotechnicznych? Ze względu na przemienny
strumień magnetyczny.
Dlaczego rdzeń transformatora składa się z blach na
zakładkę? W celu ograniczenia szczeliny powietrznej.
Do budowy rdzenia tran. urzywa się blach -
anizotropowych o niskiej stratnosci.
Do budowy rdzenia transformatora używa się blach:
Anizotropowych o niskiej stratności.
Do czego służy transformator? Zmiany napięcia, izolacji
obwodów elektrycznych, tłumienia zakłóceń.
Do czekgo sluzy trans. - zm. nap. izolacji obw. elektr.,
tlumienia zakl.
Elementy R1/2 i X1/2 schematu zastępczego są? Liniowe
Elementy R1/2 i X1/2 schematu zastępczego transformatora
wyznacza się: Z próby zwarcia normalnego.
Elementy R1/2, X1/2 schematu zastepczego tran.
wyznacza się - z proby zwarcia normalnego.
Elementy Rfe i Xu szchematu zastepczego transf. sa -
nieliniowe zalezne od nap. zasilajacego.
Elementy RFe, Xμ schematu zastępczego transformatora
są: Nieliniowe, zależne od napięcia zasilającego.
Elementy RFe, Xμ schematu zastępczego transformatora
wyznacza się? Z próby biegu jałowego.
Elementy Rfe, Xμ, Schematu zastepczego wyznacza się -
z proby biegu jalowego.
Elementy schematu zastepczego sprowadza się dna
strone o liczbie z1? - Z'2=Z2(z1/z2)2, Z'odb=Zodb(z1/z2)2
Elementy schematu zastępczego transformatora
sprowadza się na stronę o liczbie zwojów z1:
Z'2=Z2(z1/z2)2, Z'odb=Zodb(z1/z2)2.
Grupa polacz. Yz11 oznacza ze - nap. pierw. I wtorne sa
przesuniete o 330°.
Grupa polaczen Dy5 oznacza - nap. pierwotne i wtorne sa
przesuniete o 150.
Grupa połączeń Dy5 oznacza? Napięcie pierwotne i wtórne
są przesunięte o 150o.
Grupa połączeń Yz11 oznacza, że: Napięcie pierwotne i
wtórne są przesunięte o kat 330°.
Impedancja zwarciowa transf. w stosunku do impedancji
przy biegu jałowym wynosi? 0,001-0,004
Jak się łączy stronę pierwotną w transf.? D lub Y.
Jaka jest sprawność transf. energetycznych? Powyzej
95%.
Jaka jest zmiana napięcia pry cosϕ=0,8 przy obciążeniu
znamionowym? Mniejsza od napiecia zwarcia.
Jaka jest zmiana napięcia przy cosϕ=0.8? Mniejsza od
napięcia zwarcia.
Jaki jest cel stosowania rdzenia ferromagnetycznego?
Aby wytworzyć duży strumień.
Jaki jest Jz od J1o biegu jałowego? Jz=10-50Jb. jałowego.
Jeżeli przy polaczeniu Yz11 liczba zwojow pierwotnych i
wtornych jest identyczna to nap. - U1f<U2f
Jeżeli przy połączeniu Yz11 liczba zwojów pierwotnych i
wtórnych jest identyczna to napięcia fazowe: U1f<U2f.
Masa miedzi uzwojenia wtornego jest - rowna masie
miedzi uzwojenia pierwotnego.
Masa miedzi uzwojenia wtórnego jest? Równa masie
miedzi uzwojenia pierwotnego.
Max zmiana napięcia wynosi? Równe napięciu zwarcia.
Max. zmiana napięcia w transf. przy obciążeniu
znamionowym? Rowna napiecia zwarcia
Nap. zwarcia tran. to nap. - na impedancji zwarcia przy
przeplywie pr. znamionowego przy zwarciu strony wtornej.
Nap. zwarcia transf. to max. spadek nap. na transf. - w
stanie obciazenia znamionowego.
Napięcie zwarcia transformatora to maksymalny spadek
napięcia na transformatorze: W stanie obciążenia
znamionowego
Napięcie zwarcia transformatora to napięcie: Na
impedancji zwarcia przy przepływie prądu znamionowego
przy zwarciu strony wtórnej.
Niemozliwosc kompensacji przeplywu wtornego przez
przeplyw pierwotny powoduje - powstanie niesymetrii
nap. fazowych.
Niemozliwosc kompensacji przeplywu wtornego przez
przeplyw pierwotny powoduje - powstanie niesymetrii
nap. przewodowych.
Niemożność kompensacji przepływu wtórnego przez
przepływ pierwotny powoduje: Powstanie niesymetrii napięć przewodowych, powstawanie niesymetrii napięć fazowych.
Niestmetryczne obc. tran. trzyfaz. Można rozlozyc na skladowe - symetryczne zgodne, przeciwne, zerowe.
Niesymetryczne obciążenie transformatora 3-fazowego można rozłożyć na składowe: Symetryczne zgodne, przeciwne, zerowe.
Oznaczenie grupy polaczen tran. trzyfaz. okesla - jak laczyc uzwojenia fazowe pierwotne i wtorne.
Oznaczenie grupy połączeń transformatora 3-fazowego określa: Przesuniecie fazowe prądu i napięcia i sposób połączenia uzwojeń.
Po co stosujemy na rdzeń ferromagnet.? Żeby wytworzyć duży strumień.
Połączenie pierwotne w trójkącie co daje z składową zerową? Nie powstaje składowa O strumienia.
Pr. biegu jal. tran. wynosi I10 ≤ 0,1I1n
Pr. pierwotny przy zwarciu awaryjnym transf. wynosi - I1za=(20-50)I1n
Pr. pierwotny przy zwarciu narmalnym transf. wynosi - I1zn=1I1n.
Prawdziwe jest rownanie tran. dla wielkosci wektorowej - I1=I'2+I10, I1z1=I2z2+I10z1.
Prawdziwe jest równanie transf. dla wielkości wektorowych? U1-E1=I1Z1 ; U'2-E'2=-I'2z'2 (I1=I'2+I10, I1Z1=I2Z2+I10z1)
Prawdziwe jest równanie transformatora dla wielkości wektorowych: I1=I2+I10, I1z1=I2Z2+I10z1.
Prąd biegu jałowego transformatora wynosi: I10≤0,1I1n.
Prąd pierwotny przy zwarciu awaryjnym transformatora wynosi: I1za.=(20-50)I1n.
Prąd pierwotny przy zwarciu normalnym transformatora wynosi: I1zn.=1,0 I1n.
Przekładnia napięciowa w transf. 3 fazowym to? - przewodowe pierwotne do wtórnego.
Przekładnia napięciowa w transf. 3-fazowych? Przewodowe pierwotne do wtórnego.
Przemienny strumien magnetyczny jest w stosunku do SEM - wyprzedza o 90.
Przemienny strumień magnetyczny jest w stosunku do SEM: Opóźniony o 90°.
Przy pol. tran. trzyfaz. do pracy rownoleglej rownosc przekladni nap. Zapewnia- takie same nap. wtorne.
Przy polaczeniu tran. trzyfaz. Do pracy rownoleglej rownosc nap. zwarcia zapewnia - rozklad obc. proporcjonalny do mocy.
Przy połączeniu transf. 3 fazowego do pracy równoległej równość mocy zapewnia? Rozklad mocy do obciazenia
Przy połączeniu transformatorów 3-fazowych do pracy równoległej równość przekładni napięciowych zapewnia: Takie same napięcia wtórne
Przy połączeniu transformatorów 3-fazowych do pracy równoległej równość napięć zwarcia zapewnia: Rozkład obciążenia proporcjonalny do mocy.
Przy zasilaniu tran. nap. sinusoidalnym pr. biegu jalowego - odksztalcony z zawawartoscia niepazystych harmonicznych.
Przy zasilaniu transformatora napięciem sinusoidalnym prąd biegu jałowego? Odkształcony z zawartością nieparzystych harmonicznych.
Rdzeń transf. 3 fazowego energ. składa się? Z blachy transf. anizotorpowych 0,35mm
Reaktancja rozproszenia uzwojenia to - stosunek SEM rozproszenia do pr. tego uzwojenia.
Reaktancja rozproszenia uzwojenia to? Stosunek SEM rozproszenia do prądu tego uzwojenia.
Remanencja? Rezystancja magnetyczna.
SEM 3 harmoncznych w tran. tzryfaz. powoduje - zmienne odksztalcenie nap. fazowych.
SEM 3 harmonicznej w tran. trzyfaz. powstaje na skutek - brak 3 harm. w pr. mag.
SEM 3 harmonicznej w transformatorze 3-fazowym powoduje? Zmienne odkształcenie napięć fazowych.
SEM 3 harmonicznej w transformatorze 3-fazowym powstaje na skutek: Nieliniowej charakterystyki magnesowania 44.SEM wzbudzana w uzwojeniu zależy od? E=4,44f z φ.
SEM wzbudzana w uzwojeniu zalezy od - E=4.44 f z ϕ.
Skladowa czynna pr. biegu jalowego tr. Jest zwiazana z - stratami w rdzeniu.
Składowa bierna prądu biegu jałowego transf. jest związana z? Strumieniem magnetycznym (straty w zelazie)
Składowa czynna prądu biegu jałowego transformatora jest związana z: Stratami w rdzeniu
Sprawność transf. Elek.? Powyżej 95%
Stopien odkształcenia prądu biegu jalowego w danym tran zależy od- rodzaju blach w rdzeniu.
Stopień odkształcenia prądu biegu jałowego w danym transformatorze zależy od: Rodzaju blach w rdzeniu.
Straty biegu jałowego transf. są? Straty w zelazie
Straty mocy w uzwojeniach zależą od? ΔP=I2R (Kwadratu pradu i rezystancji)
Straty w rdzeniu tran. sa najwieksze - przy biegu jalowym transfor.
Straty w rdzeniu transformatora są największe? Przy obciążeniu znamionowym transf amatora
Straty w uzwojeniu przy biegu jałowym transformatora są: Pomijalnie małe
Straty w uzwojeniu przy biegum jal. tran. sa - pomijalnie male.
Strumien rozproszenia w transf. to - strum. wytworzony przez przeplyw uzwojenia ale nie sprzezony z drugim uzwojeniem.
Strumien w rdzeniu tran. jest najwiekszy - przy biegu jalowym.
Strumień 3 harmonicznej w transf. 3 fazowym powstaje na skutek:? Indukowania nap.
Strumień w rdzeniu transformatora jest największy: Przy biegu jałowym transformatora
Strumtert rozproszenia w transformatorze to: Strumień wytworzony przez przepływ uzwojenia ale nie sprzężony z drugim uzwojeniem
Tran. trzyfaz. Z rdzeniem trzy kolumnowym plaskim - europa.
Transformator 3-fazowy z rdzeniem 3-kolumnowym płaskim? Europa.
Trzy tran. jednofazowe polaczone do pracy trojfaz. nazwya się - system amerykanski.
Trzy transformatory jednofazowe połączone do pracy 3 fazowej nazywa się: Systemem amerykańskim.
Uklad polaczen Yz11 bez przewodu zerowego - nadaje się do obc. niesymetrycznych.
Uktad połączeń Y z 11 bez przewodu zerowego: Nadaje się do obciążeń niesymetrycznych.
Uzwojenie pierwotne transf. 3 fazowego łączy się? D, Y.
W autotran. jednofaz. pr. wtorny jest - I2>I1 lub I2<I1.
W autotransformatorze 1-fazowym prąd wtórny jest: I2<I1.
W pr. magn. tran. trzyfaz. Yd z przewodem zerowym - jest zawsze 3 harmoniczna.
W pr. magnesujacym tran. trzyfaz. Yd bez przewodu zerowego - brak 3 harmonicznej.
W prądzie magnesującym transformatora 3-fazowego Yd bez przewodu zerowego? Brak 3 harmonicznej.
W prądzie magnesującym transformatora 3-fazowego Yd z przewodem zerowym? Występuje zawsze 3 harmoniczna.
W stanie zwarcia normalnego tran. straty w uzwojeniach sa - takie ja w stanie obc. znam.
W stanie zwarcia normalnego transf. , straty w rdzeniu są? Pomijalnie male
W stanie zwarcia normalnego transformatora straty w uzwojeniach są? Takie jak w stanie obciążenia znamionowego.
Wada autotran. - duzy pr. zwarcia awaryjnego.
Wada autotransformatorów? Duży prąd zwarcia awaryjnego.
Wartosc max. 3 harmonicznej w pradzie magnesujacym transformatora 3-fazowego jest: mniejsza od pierwszej harmonicznej.
Wartość maksymalna trzeciej harmonicznej w prądzie magnesującym transformatora 3-fazowego jest: To zależy od stopnia nasycenia rdzenia
Wartość max Indukcji w rdzeniu transformatora 3-fazowego? 1.7T.
Warunkiem pol. tran. trzyfaz. Do pracy rownoleglej jest - rownosc przekladni nap., nap. zwarcia, zbilizona moc i odpowiednie grupy pol.
Warunkiem polaczenia zrodel enerki elektry. Do pracy rownoleglej jest - proporcjonalny do mocy rozklad obciazenia.
Warunkiem połączenia źródeł energii elektrycznej do pracy równoległej jest: Proporcjonalny do mocy rozkład obciążenia
Warunkiem przyłączenia transformatorów 3-fazowych do pracy równoległej jest: Równość przekładni napięciowych, napięć zwarcia, zbliżona moc i odpowiednie grupy połączeń.
Wielkość strumienia 3 harmonicznej w transformatorze 3-fazowym zależy od: Stopnia nasycenia rdzenia, materiału na drodze strumienia, grupy połączeń.
Wielkość strumienia trzeciej harmonicznej w transf. 3-fazowym zalezy od- stopnia nasycenia rdzenia, materialu na drodze strumienia, grupy polaczen.
Wspolczynnik mocy biegu jal. wynosi - cosϕ0 ≤ 0,1.
Wspolczynnik mocy przy zwarciu awaryjnym tran. wynosi - cosϕz2 ≤ 0,2.
Współczynnik mocy biegu jałowego transformatora energetycznego wynosi: cosϕ0≤0,1.
Współczynnik mocy przy zwarciu awaryjnym transformatora wynosi? cosϕz2≤0,2.
X1, X2, R1, R2 są elem. nieliniowym czy są ? Są liniowe.
Z jakich blach są zbudowane tran. elek.? Ferromagnetycznych.
Z proby biegu jalowego można wyznaczyc - reaktancje magnesujaca i straty w zelazie.
Z proby zwarcia i biegu jalowego można wyznaczyc - wszystkie parametry schematu zastepczego.
Z próby biegu jałowego można wyznaczyć? Reaktancję magnesującą i straty w żelazie.
Z próby zwarcia i biegu jałowego można wyznaczyć? Wszystkie parametry schematu zastępczego.
Zalety autotransformatorów? Wysoka sprawnosc.
Zastosowanie uzwojenia pierwotnego pol. w gwiazde z przewodem zerowym powoduje - przeniesienie niesymetrii obc. na siec zasilajaca.
Zastosowanie uzwojenia pierwotnego połączonego w gwiazdę z przewodem zerowym powoduje? Przeniesienie niesymetrii obciążenia na sieć zasilającą.
Zastosowanie uzwojenia pierwotnego połączonego w trójkąt powoduje? Tlumi 3 harmoniczna w pradzie magnesujacym
Zastosowanie uzwojenia połączonego w trójkąt? Zawsze tlumi 3 harmon.
Zmiana nap. w tran. przy obc. znamionowym jest - w szczegolnym przypadku zerowa nawet mniejsza od zera.
Zmiana nap. w tran. przy obciazeniu pr. znamion. to - roznica miedzy modulami nap. pierwot. i sprowadzonego wtornego.
Zmiana napięcia w transformatorze przy obciążeniu prądem znamionowym to: Różnica między modułami napięcia pierwotnego i sprowadzonego wtórnego.
Zmiana napięcia w transformatorze przy obciążeniu znamionowym jest: W szczególnym przypadku zerowa a nawet mniejsza od zera.
ASYNCHRONY
Aby maszyna pracowała jak prądnica - trzeba dostarczyć mocy biernej o stałej f
Cewka średnicowa ma rozpiętość - podziałki biegunowej
Co określa (R2'/Xs) - poślizg krytyczny
Częstotliwość SEM uzwojenia wirnika silnika klatkowego obciążonego znamionowo wynosi: a) f2=1,5Hz
Częstotliwość SEM zależy od: b) częstotliwości napięcia zasilającego stojan i poślizgu
Cos w biegu jałowym silnika asynchronicznego wynosi: b) cos(0,2-0.3)
Co powoduje przepływ - powstanie SEM w uzwojeniu, powstanie pola wirującego
Do rozruchu silnika asynchronicznego pierścieniowego stosuje się: d)rezystancję Rd i SEM Ed włączone dodatkowo w obwód wirnika.
Dla p =3 prędkość silnika = 950
Dla silników pierścieniowych można stosować - Ed i R włączone w wirnik
Dla maszyn o s=(-+1) moment jest min dla - pracy hamulcowej
Elementy RFe i Xmi schematu zastępczego silnika asynchronicznego wyznacza się z: a)próby biegu jałowego
Głęboko żłobkowana maszyna to taka gdzie - rowki wchodzą promieniowo w wirnik
Jak wyznacza się dane do wykresu kołowego maszyny asynchronicznej: b)z próby zwarcia i biegu jałowego
Jaki jest cel budowania silnika asynchronicznego dwuklatkowego: c)uzyskanie dużego momentu i ograniczonego prądu rozruchowego
Jeżeli transformator obciazymy znamionowymi silnikami asynchronicznymi to kiedy napiecie na zaciskach będzie najwieksze d)przy obciążeniu znamionowym.
Kołowe wirujące pole magnetyczne w maszynie asynchronicznej można wytworzyć: c)najmniej 2-fazowe
obciążeniu znamionowym.
Jeżeli transformator obciążymy znamionowo silnikem asynchronicznym (I1=const, to nap na jego zaciskach będzie max) - przy obciążeniu ich znamionowo
Jeżeli silnik pracuje w stanie obciążenia znamionowego, to ile wynosi f - F2=1,5 Hz, bo Sr=3%, f2=s*f1=0,03*50 Hz
Jeżeli napięcie zasilania obniżymy - rosną straty, maleje prędkość
Jeżeli transformator obciążymy znamionowo silnikiem asynchron.(ect) - Przy obciążeniu ich znamionowo
Jak wiruja wyższe harmoniczne - przeciwnie
Jaki silnik nazywamy dwuuzwojeniowym - pierścieniowy 2-klatkowy, wielobiegowy, 2-biegowy
Jakie uzwojenie ma kg=1 i ks=1 - uzwojenie średnicowe
Moment elektromagnetyczny w maszynie asynchronicznej zalezy zależy od: c)siły działającej prostopadle do promienia i średnicy wirnika
Moment elektromagnetyczny w silniku asynchronicznym zależy od: c)mocy i prędkości kątowej pola wirującego
Moment elektromagnetyczny w maszynie asynchronicznej klatkowej podłączonej do sieci zależy od: b)poślizgu
Maszyna asynchroniczna występuje najczęściej jako: b)silnik
Moment maksymalny w silniku asynchronicznym zalezy od kwadratu napiecia i kwadratu czestotliwosci zasilania
Moment maksymalny w maszynie asynchronicznej 3-fazowej wyraża się wzorem: a)Mmax=3U21/2sXz
Maszyna asynchroniczna o p=3 włączona do sieci krajowej pracuje jako prądnica przy prędkości obrotowej :
1050obr/min
Maszyna asynchroniczna o p=3 wpływa do sieci krajowej pracuje jako silnik przy prędkości obrotowej:
nn=950 obr/min.
Moment elektromagnetyczny dla s=+-1 w silniku
asynchronicznym klatkowym jest:
Moc znamionowa w silniku asynchronicznym wyraża się
wzorem: a) Pn=n*Mn
Moment elektromagnetyczny może być: c)napędowy lub
oporowy , zależy od charakteru pracy
Maszyny asynchroniczne to najcześciej - silniki
Maszyna asynchroniczna może pracować jako prądnica
- jeżeli jest podł. Do sieci 3-faz, poślizg<0
Max moment pola wirującego jest dla poślizgu - 0,25
Moment el. - to siła działająca prostopadle do średnicy
wirnika
Moment elektromag. - zależy od siły działającej na
uzwojenie prostopadle do promoienia i średnicy wirnika
Moment elektromag.= użytecznemu momentowi
napędowemu - przy pracy silnikowej i ustabilizowanej
Vobr
Moment elektromag. Może być - oporowy lub napędowy,
zależy od stannu pracy
Moment elektomag. Silnika zależy od - prądu, objętości
maszyny i chłodzenia
Moment elektromag zależy od - prędkości kątowej pola
wirującego i mocy
Moment elektromag. zależy od - poślizgu
Moc pola wirowego to - Moc czynna przekazywana ze
stojana do wirnika
Moc znamionowa to - Pn=MS*S
Obnizenia napiecia zasilajacego silnik asynchroniczny
obciazony znamionowo powoduje wzrost strat i
spadek predkosci
Obniżenie częstotliwości napięcia zasilającego silnik
asynchroniczny powoduje: c)konieczność obniżenia
napięcia
Przekroczenie poślizgu w silniku asynchronicznym
klatkowym prowadzi do: a)zatrzymanie wału -utyk
poslizg wzgledny w silniku asynchronicznym
klatkowym biegnacym jalowo wynosi ; So= 0,3%
Podziałka biegunowa to: a)odległość po obwodzie twornika,
między sąsiednimi biegunami.
Przy jakim poślizgu moc pola wirującego w silniku
asynchronicznym klatkowym jest maksymalna: s=0,25.
Poślizg względny w silniku asynchronicznym klatkowym
obciążonym znamionowo wynosi: c)Sn=3%
Prędkość wirowania pola magnetycznego od przepływu
stojana w maszynie asynchronicznej zależy od:
Prąd biegu jałowego w silniku asynchronicznym wynosi:
b)I10=(0,2-0,5)In
Prędkość obrotową w silniku asynchronicznym można
regulować przez zmianę: d)częstotliwości, liczby par
biegunów, poślizgu.
Prędkość obrotowa wału maszyny asynchronicznej
określamy wzorem: c)n=60f/p(1-s)
Prędkość obrotową reguluje się przez zmianę liczby par
biegunów w: c)tylko w silniku klatkowym
Parametry X i R wyznacza się z - próby zwarcia i biegu
jałowego
Punkty do wykresu kołowego wyznacza się z - próby
zwarcia i biegu jałowego
Przy regulacji prędkości czestotliwością - nap musi maleć
Poślizg względny w maszynie asynchr. Wynosi - 3%
Prąd biegu jałowego wynosi - I10=0,2 - 0,5 In
Prędkość pola wirującego = Przepływowi w wirniku - dla
prędkości synchronicznej
Prędkości pól wirujących w uzwojeniu stojana i
przepływowi wirnika są - takie same
Przepływ wypadkowy 3 faz jest równy - 3/2
Prędkość wirowania pola zależy od - częstotliwości liczby
par biegunów
Podziałka biegunowa - mierzona po obwodzie twornika
między sąsiednimi biegunami
Poł gwiazda-trójkąt przy rozruchu stosuje się do -
silników do pracy znamionowej w trójkącie
Poślizg w maszynach asynchronicznych to - różnica
prędkości pola wirującego i wirnika
Poślizg przy obc znamionowym wynosi - 2 - 5%
Prędkość prądnicy asynchronicznejo liczbie par
biegunów= 3 - 1050
Prędkość prądnicy synchronicznej i silnika
asynchrnicznego podł do tej samej sieci jest - różna
Przekroczenie poślizgu krytycznego powoduje -
zatrymanie, utyk
Przyspieszenie rozruchu silnika zależy od - M
napędowego, M oporowego i prądu
Rezystancja dodatkowa Rd w uzwojeniu wirnika wpływa:
d)obniżenie prądu i podwyższenie momentu
rozruchowego.
Rozruch silnikow asynchronicznych malych mocy
dokonujemy przez wlaczenie na znamionowe napiecie
Regulację prędkości przez zmianę par biegunów stosuje się
w silniku asynchronicznym: a)klatkowym
Regulację Vobr. przeprowadza się poprzez zmianę -
częstotliwości, liczby par biegunów i poślizgu
Regulację prędkości poprzez zmianę liczby par
biegumów uzyskuje się - skokowo
Rozruch silnika przy obniżonym nap zasilania stosuje się
w silnikach - klatkowych dużej mocy
Silnik asynchroniczny o podwójnym uzwojeniu wirnika
nazywamy: a)dwuklatkowym
SEM transformacji w uzwojeniu powstaje w wyniku:
b)zmiany strumienia sprzężenia uzwojenia
SEM wzbudzana w bokach średnicowego zwoju : d) sumuja
się arytmetycznie dajac SEM zwoju
SEM rotacji wzbudzona w uzwojeniu fazy(jednej) stojana
maszyny asynchronicznej wynosi: E=4,44 Ka*Kg*z*f*fi
Sprawność silnika 10 kW - 90 %
Sem rotacji w uzwojeniu powstaje w wyniku: a)zmiany
strumienia w czasie
Silnik asynchroniczny klatkowy obciazony znamionowo
pobiera z sieci Moc czynna a oddaje bierna
pojemnosciowa
Silniki asynchroniczne małej mocy włączamy:
b)bezpośrednio do sieci
Silnik asynchroniczny nazywamy głębokożłobkowym:???
SEM transformacji wytwrza się przez - zmianę strumienia
sprzężonego z uzwojeniem w czasie
Stosowanie silników klatkowych powoduje - zmniejszenie
prądu rozruchowego i zwiekszenie momentu???
Uzwojenia stojana mogą być poł. - szeregowo lub
równolegle, 2x większy prąd i 2x większe nap.
Uzwojenie stojana maszyny asynchronicznej jest:
b)dwuwarstwowe lub jednowarstwowe
Warunkiem pracy prądnicowej maszyn
asynchronicznych jest: a)dostarczenie mocy biernej i
stałej częstotliwości.
Warunkiem powstawania magnetycznego pola
wirującego w maszynie asynchronicznej jest: d)3
symetryczne uzwojenia fazowe przesunięte o 120o i
zasilane napięciem przemiennym.
Wzrost częstotliwości napięcia zasilającego silnik
asynchroniczny powoduje: d)proporcjonalny wzrost
prędkości obrotowej.
Wykres kołowy w maszynie asynchronicznej jest:
d)interpretacją geometryczną pracy przy różnych
poślizgach.
Włączenie rezystancji w obwód wirnika powoduje -
Zmniejszenie prądu rozruchow. I zwiększenie momentu
rozruchowego
W jakij maszynie stosuje się zmianę liczby par biegunów
- klatkowej
Wzór na V obrotową - n=(60f/p)*(1-s)
Wzór na Ef=4,44*Ku*z*f*fi
W silniku asynchronicznym sem rotacji indukuje się -
zmiana strumienia wzgl. Uzwojenia
W uzwojeniu średnicowym - sem dodajemy ( sumuje się
arytmetycznie)
Warunki pola kołoego wirującego - min 2 fazy
Warunkiem powstania wirującego pola mag. są -
zasilanie 3-fazowym nap. Faz przesuniętych o 120 stopni
Włączenie Ed w obw. wirnika powoduje - możliwość
regulacji prędkości obrotowej
Wł. rezystancji w obw wirnika powoduje - zmniejszenie
prądu rozruchu i zw. Momentu rozrychowego
Wsółczynnik grupy - stosunek Eg do sumy arytmetycznej
sem zezwojeń
Wykres kołowy przedstawia - zależności poślizgów
Z jakiej próby wyznacza się Rfe i Xmi - biegu jałowego
Zmiana liczby par biegunow - tylko w klatkowych
Źródłem sem rotacji jest - wirujące pole mag.
Zwiększenie f powoduje zmianę - V synchronicznej
Zmiana częstotliwości powoduje - konieczność zmiany
nap zasilania (f-rośnie, to i U-rośnie)
Zmiana częstotliwości zasilania maszyny
asynchronicznej powoduje: b)zmianę prędkości
synchronicznej
Zmiana Rd w obwodzie wirnika silnika asynchronicznego
powoduje zmiane predkosci walu przy obciazeniu
SYNCHRONY
Aby przeprowadzić synchronizację należy bezwzględnie
zapewnić - taką samą kolejność faz napięcia.
biernej.
Cha. zew. prądnicy to zależność - U=f(I) przy cos , f, =
const.(Im, n, cos fi = const).
Cha. zwarcia jest - liniowa.
Charakterystyka zew. prądnicy synchr. jest - opadająca
lub rosnąca.
Charakterystyka zewnętrzna prądnicy opisuje wzor:
U=f(I) przy n, Im, cos =const
Charakterystyka zewnętrzna prądnicy synchronicznej
jest: -opadająca lub rosnąca.
Czas trwania stanów nieustalonych po zmianie
strumienia wynosi - 1,2 - 2s.
Częstlotliwość SEM wzbudzonej w tworniku maszyny
synchr. zależy od - prędkości kątowej i str wzb (liczby
biegunów magneśnicy).
Czy silnik synchroniczny może być źródłem mocy
biernej? -tak
Ilość biegunów stojana maszyny synchr. jest - taka sama
jak wirnika.
Jaka jest sprawność maszyn el średniej mocy - 80-90%.
Jeżeli prądnicę synchr. obciążymy elementem RC to aby
U,f=const trzeba - zwiększyć prąd wzbudzenia.
Kąt grzniczny dla prądnic turbinowych jest równy - 90o .
Kąt mocy w masz. synchr. to - kąt pomiędzy osią
magneśnicy, a polem wypadkowym.
Kompensator synchroniczny to - silnik synchroniczny
biegnący jałowo.
łączenie odbiorników i zmianę prądu wzbudzenia.
Maszyna synchr. może oddawać moc czynną - przy
prądzie wzbudzenia różnym od zera.
Maszyna synchr. połączona z siecią sztywną wypada z
synchronizmu przy mocy czynnej - zależnie od
Maszyna synchr. reluktancyjna jest - źródłem mocy
czynnej i biernej indukcyjnej.
Maszyny synchroniczne występują najczęściej jako -
prądnice.
Moc bierną prądnicy przyłączonej do sieci sztywnej
reguluje się - prądem wzbudzenia.
Moc wzbudzenia prądnicy synchronicznej jest: -równa
0,01 mocy znamionowej
Moment dyn. w maszynie cylindrycznej opisuje wzór -
nie może być za duża (Robc<Rkr) i istnienie
szczątkowego.
Objawem idealnej synchronizacji jest: - wyrównanie
napięć i częstotliwości po zamknięciu łącznika.
Oporność wewnętrzna prądnicy synchr. zależy od -
reakrancji twornika.
Po obciążeniu prądnicy odbiornikiem RL, aby stałe U i f
trzeba - zwiększyć prąd wzbudzenia.
Podstawowe typy maszyn synchronicznych to: -
cylindryczne, jawnobiegunowe.
Poprzeczna reakcja twornika w maszynie synchr. jest
źródłem - momentu na wale.
Prąd i SEM wypadkowa EW w uzwojeniu fazowym
twornika maszyny synchr. obciązonej
Prąd i SEM wzbudzenia E0 w uzmojeniu fazowym
twornika są - zależne od obciążenia.
Prąd prądnicowy popłynie przy - za małej częstotliwości
prądnicy w stosunku do sieci.
Prąd wzb prądnicy synchr. w czasie pracy samotnej
zależy od - stanu obciążenia
Prąd zwarcia prądnicy synchr - zależy od prędkości
kątowej gdy zbliża się ona do zera.
Prądnica synchr. może być - obcowzbudna lub
samowzbudna.
Prądnice synchr. dzielą się na - jawnobiegunowe i
turbinowe.
prądu wzbudzenia.
Prędkośc obrotowa maszyny synchr. zależy od - liczby
par biegunów i częstotliwości sieci.
Prędkośc prądnicy synchr. i silnika asynchr. podł. do tej
samej sieci jest - różna.
Prędkość maszyny synchr. typu cylindrycznego wynosi
- 3000 lub 3600 obr/min. 50 lub 60 Hz, przy p=1.
Prędkość pola wirującoego równa się przepływowi w
wirniku - dla prędkości synchronicznej.
Prędkość pól wirujących w uzwojeniu stojana i
przepływu wirnika są - takie same.
Reakcja reakcji twornika to - stosunek SEM wzbudzenia
przez strumień reakcji twornika do prądu twor.
Regulację prędkości m. synchr. uzyskuje się przez -
zmianę f, U zas, liczby par biegunów, poślizgu.
Różnica przesunięcia w fazie nap sieci i prądnicy
powoduje - przepływ prądu czynnego.
SEM wzb w prądnicy biegnącej jałowo zależy od -
strumienia wzb i prędkości kątowej.
Silnik reluktancyjny może pracować jako prądnica - musi
mieć sieć 3-fazową, która dostarczy mocy
Stosunek zwarcia biegu jałowego prądnicy
synchronicznej jest: -kz=Im0/Imz
Stosunek zwarcia to - Kz = Imo/Imz.
symetrycznie są - przesunięte o kąt zależny od
charakteru obciążenia.
Ustabilizowany prąd zwarcia biegu jałowego jest -
mniejszy od znamionowego.
Ustabilizowany prąd zwarcia biegu jałowego prądnicy
synchronicznej jest: -mniejszy od znamionowego
Uzw wzb prądnicy turbinowej (jawnobiegunowej) są -
skupione.
Uzw twornika m. synchr jest - 3-fazowe ułożone w
żłobkach stojana, połączone w gwiazdę.
Uzw twornika m. synchr wykonuje się na parę biegunów
- taką samą jak wirnika.
Uzw wzbudzenia maszyny synchronicznej
jawnobiegunowej jest:- skupione
Uzw. stojana mogą być poł - w gwiazdę lub trójkąt lub z.
W jakiej m synchr występuje M reluktancyjny - w
jawnobiegunowej.
W m synchr jawnobiegunowej stosunek Xd/Xl jest -
zależny od obciążenia.
W m synchr typu jawnobiegunowego graniczny kąt mocy
wynosi - mniejszy od 90o.
W m synchr typu turbo znamionowy kąt mocy jest - ok.
90o (25 - 40o).
W m synchr. pracującej samotnie można regulować moc
bierną przy zachowaniu U,f=const - przez
W maszynie synchronicznej typu jawnobiegunowego
znamionowy kąt mocy jest: -mniejszy od 45˚
W pierwszej chwili po zmianie prądu twornika reakcja
wewnętrzna m synchr jest - ok. 2 (10-30) razy mniejsza
jak w stanie ustalonym.
Wartość stosunku prądnicy synchr wynosi - Kz=Imo/Imz.
Wartość stosunku zwarcia w prądnicy synchronicznej
wynosi: kz=(0,5 -1)
Warunek samowzbudzenia prądnicy synchronicznej:
Фszcz>0, Фszcz+Фwzb, Rwzb <Rkryt
Warunkiem pracy kompensatorowej m synchr jest -
zasilanie uzwojenia wzb odp prądem.
Warunkiem pracy prądnicowej m synchr jest -
dostarczenie mocy biernej i stabilizacja częstotliwości
(napędzanie wału).
Warunkiem pracy silnikowej m synchr jest -
synchronizacja z siecią i obciążenie momentem.
Warunkiem samowzbudzenia prądnicy synchr jest -
odpowiednie poł uzw wzbudzenia, rezystancja wzb
Wirnik m synchr jest - żłobkowany (typu turbo) i z
wystającymi biegunami (jawnobiegumowa).
Wzdłóżna reakcja twornika powoduje - zmniejszenieSEm
fazowego.
Znamionowy kąt mocy m jawnobiegunowej to - mniejszy
niż 45o.
Zwiększenie częstotliwości powoduje zmianę - prędkości
synchronicznej.
Wyszukiwarka
Podobne podstrony:
Maszyny Elektryczne 2 cw1 tabela pomiarowa, Szkoła, Semestr III, Maszyny Elektryczne, Maszynki, Masz
Maszyny Elektryczne 2 cw1, Szkoła, Semestr III, Maszyny Elektryczne, Maszynki, Maszyny elektryczne [
Maszyny Elektryczne 2 cw3, Szkoła, Semestr III, Maszyny Elektryczne, Maszynki, Maszyny elektryczne [
Egzamin z maszyn IV sem, Szkoła, Semestr III, Maszyny Elektryczne, Maszynki, Maszyny elektryczne [Za
Zadania energetyka, Szkoła, Semestr III, technologia maszyn energetycznych, Materiały Skiepki, Kol 1
sprawko ickiewicz1, Szkoła, Semestr III, Projektowanie Maszyn Laboratorium
Zadanie energetyka, Szkoła, Semestr III, technologia maszyn energetycznych, technologia maszyn energ
Dzialanie-4 suwu-iskrowy, Szkoła, Semestr III, technologia maszyn energetycznych, Materiały Skiepki
Wyklad energetyka, Szkoła, Semestr III, technologia maszyn energetycznych, wyklad 1 i 2
WYKLAD zasoby energii, Szkoła, Semestr III, technologia maszyn energetycznych, Materiały Skiepki
Zaliczenie do reki, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, SEMESTR III, Chemia
kolo 1 semestr 3, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, SEMESTR III, Chemia,
sc na wawrzyna skr, Semestr III, Podstawy elektroniki I
smary kwity1, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, SEMESTR III, Chemia, Pali
Mechanika, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, SEMESTR III, Mechanika
chemia 1 koło 3 semestr, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, SEMESTR III, C
elektro otwarte, Mechanika i Budowa Maszyn PWR MiBM, Semestr III, elektronika, Egzamin - pytania, op
Elektra Cw.1, Akademia Morska, 2 rok', Semestr III, II rok Wydział Mech, Maszyny elektryczne
elektra4, Akademia Morska, 2 rok', Semestr III, II rok Wydział Mech, Maszyny elektryczne, Ele cw4
więcej podobnych podstron