CCF20090604�001 (2)
|
Zależności między kątami a, P, y | ||
|
Symetria obrotowa: |
Brak symetrii obrotowej: | |
|
=> Jeśli występuję jedna oś obrotu wskazuje ona kierunek wyróżniony |
=> Jeśli nie występuje oś obrotu, a jedynie płaszczyzna odbicia | |
|
(uprzywilejowany), a pozostałe dwie osie są do niej prostopadłe np. |
kierunek wyróżniony iest prostopadły do tei płaszczyzny | |
|
2y (Y); 3, -3,3m (Z); 4, -4,4/m (Z); 6,6mm (Z) |
(zwyczajowo jest to kierunek Y), a pozostałe kierunki są prostopadłe | |
|
Wyjątkiem iest grupa punktowa mm2. w którei brak kierunku wyróżnionego, a osi dwukrotnej przypisuje sie kierunek Z (2z) |
do osi wyróżnionej: m (Y my) | |
|
=> Gdy występuję wiecei niż iedna oś obrotu kierunek wyróżniony iest |
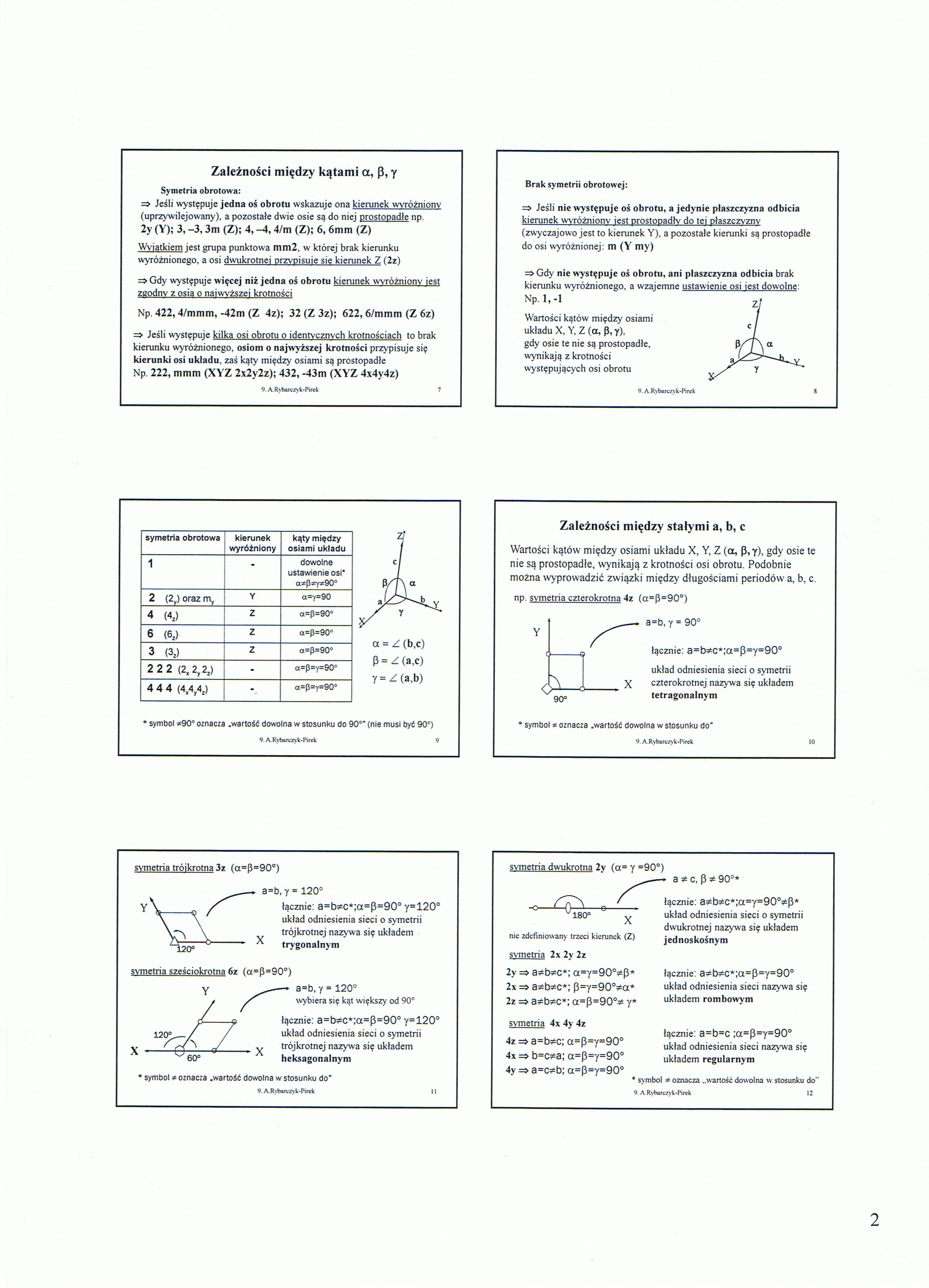
=> Gdy nie występuje oś obrotu, ani płaszczyzna odbicia brak kierunku wyróżnionego, a wzaiemne ustawienie osi iest dowolne: | |
|
zgodny z osia o najwyższej krotności |
Np. 1,-1 zj | |
|
Np. 422,4/mmm, -42m (Z 4z); 32 (Z 3z); 622,6/mmm (Z 6z) |
Wartości kątów między osiami / | |
|
=> Jeśli występuję kilka osi obrotu o identycznych krotnościach to brak kierunku wyróżnionego, osiom o najwyższej krotności przypisuje się kierunki osi układu, zaś kąty między osiami są prostopadłe Np. 222, mmm (XYZ 2x2y2z); 432, -43m (XYZ 4x4y4z) |
układu X, Y, Z (ot, P, y), c\ gdy osie te nie są prostopadłe, \ a wynikają z krotności ------ występujących osi obrotu Y | |
|
9. A.Rybarczyk-Pirek 7 |
9. A.Rybarczyk-Pirek 8 |
|
symetria obrotowa |
kierunek wyróżniony |
kąty między osiami układu |
|
1 |
- |
dowolne ustawienie osi* a^p^Y^90° |
|
2 (2y) oraz my |
Y |
a=y=90 |
|
4 (4Z) |
Z |
a=p=90° |
|
6 (6Z) |
Z |
a=p=90° |
|
3 (3Z) |
Z |
a=p=90° |
|
2 2 2 (2X 2y 2Z) |
- |
a=p=y=90° |
|
4 4 4 (4x4y4z) |
- |
a=p=y=90° |
* symbol *90° oznacza .wartość dowolna w stosunku do 90°" (nie musi być 90°)
9. A.Rybarczyk-Pirek
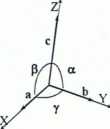
symetria tróikrotna 3z (a=P=90°)
Y
łącznie: a=b*c*;a=p=90° y=120 układ odniesienia sieci o symetrii trójkrotnej nazywa się układem ^ trygonalnym
symetria sześciokrotna 6z (a=P=90°)
X


a=b, y = 120°
wybiera się kąt większy od 90°
łącznie: a=b*c*;a=p=90° y=120° układ odniesienia sieci o symetrii trójkrotnej nazywa się układem heksagonalnym
* symbol * oznacza .wartość dowolna w stosunku do’
9. A.Rybarczyk-Pirek 11
Zależności między stałymi a, b, c
Wartości kątów między osiami układu X, Y, Z (ct, p, y), gdy osie te nie są prostopadłe, wynikają z krotności osi obrotu. Podobnie można wyprowadzić związki między długościami periodów a, b, c.
np. symetria czterokrotna 4z (a=3=90°)
-o

o-
90°

a=bt y = 90°
łącznie: a=b*c*;a=p=y=90°
układ odniesienia sieci o symetrii czterokrotnej nazywa się układem tetragonalnym
* symbol * oznacza .wartość dowolna w stosunku do’
9. A.Rybarczyk-Pirek 10
|
symetria dwukrotna 2v (a= y |
=90°) ^—► a ^ c, p * 90°* |
|
v180° ^ |
łącznie: a^b:?ic*;a=y=90Vp* |
|
układ odniesienia sieci o symetrii dwukrotnej nazywa się układem | |
|
nie zdefiniowany trzeci kierunek (Z) |
jednoskośnym |
|
symetria 2x 2v 2z | |
|
2y => a#b«*; a=y=90o:ip* |
łącznie: a*b*c*;a=p=y=90° |
|
2x =i> a*b*c*; p=y=90Va* |
układ odniesienia sieci nazywa się |
|
2z => a^b^c*; a=p=90V y* |
układem rombowym |
|
symetria 4x 4v 4z | |
|
4z => a=b^c; a=p=y=90° |
łącznie: a=b=c ;a=p=y=90° |
|
układ odniesienia sieci nazywa się | |
|
4x => b=c*a; a=p=y=90° |
układem regularnym |
|
4y => a=c*b; a=P=y=90° | |
|
* |
symbol * oznacza „wartość dowolna w stosunku do" |
|
9. A.Rybarczyk-Pirek 12 | |
2
Wyszukiwarka
Podobne podstrony:
CCF20090421�001 (2) r M i %>-■ m ■!nfV iZależności między kątami a, p, y Symetrii obrotowa:
Slajd07 Zależności między kątami zarysu A P AP cos p tgan = —-— =----= tg a cos
74 [1600x1200] 0 Nieantagonistyczne zależności między gatunkami Uczniowie często pomagają sobie w na
HPIM5127 Natomiast między kątami obrotu obydwu walów łączonych sprzęgłem istnieje zależność (1.27) t
P1011306 Brak zależności między •Stężeniem •Czasem narażenia (ekspozycja) •Konkretną reakcją
skanowanie0003 (8) 50 tego zdolny. Brak lub zanik tego typu zależności między ludźmi wyklucza zasadn
DSC?59 Zależność między posuwami Między pt, p i p, występuje w przypadku obrotowego ruchu głównego,
CCF20090304�000 Krzywa zapominania albo krzywa Ebbinghausa - linia krzywa przedstawiająca zależność
CCF20090605�010 zaostrza ucisk i wyzysk; nie sama w sobie technika, lecz zależności między ludźmi są
CCF20090421�001 (7) fObrót śrubowy - operacja symetrii polegająca na połączeniu zwykłego obrotu i tr
CCF20090421�003 (4) Ze względu na symetrię translacyjną sieci;krystalicznej w krystalografii dopuszc
CCF20090421�004 (2) Obrót inwersyjny - operacja symetrii polegająca na połączeniu zwykłego obrotu i
CCF20090421�005 (2) Zbiory niezmiennicze operacji symetrii (niezmienniki) Niezmiennik przekształceni
CCF20091108�014 STRES ZAWODOWY A ZDROWIE PRACOWNIKÓW 181 Różne typy zależności między dopasowaniem o
stąd otrzymamy bardzo ważną zależność dla obwodów symetrycznych połączonych w gwiazdę:
więcej podobnych podstron