Image0011 (3)
J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - metody numeryczne 21
Algorytm Newtona (metoda stycznych).
1° przyjmij k — 0 i wybierz punkt startowy xk,
2° oblicz Q ), Q' (xk ) i Qn {xk ),
3° znajdź minimum xkjn paraboli aproksymującej Q (x) w punkcie xk wg wzoru (4.18) i przyjmij go za bieżące przybliżone rozwiązanie,
4° jeżeli
k k X —x
m
<6, to zakończ obliczenia przyjmując iW przeciwnym przypadku
k k
podstaw k = k +1, x =x i powróć do punktu 2°.
Jeżeli pochodne Qr (rc) i Q" (x) nie mogą być wyrażone w sposób jawny lub jest to trudne, to operator różniczkowania możemy zastąpić przybliżonym operatorem różnicowym (metoda quasi-newtonowska).
Q'(xk)= +s)-Q{x1' -ó)
26
82
gdzie: <5>0 - krok o małej wartości.
J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - metody numeryczne 22
MINIMALIZACJA FUNKCJI WIELU ZMIENNYCH
ALGORYTMY MINIMALIZACJI W NIEZALEŻNYCH KIERUNKACH
Kierunek poszukiwania rozwiązania przybliżonego w iteracji k+1 nie zależy od kierunku w iteracji k
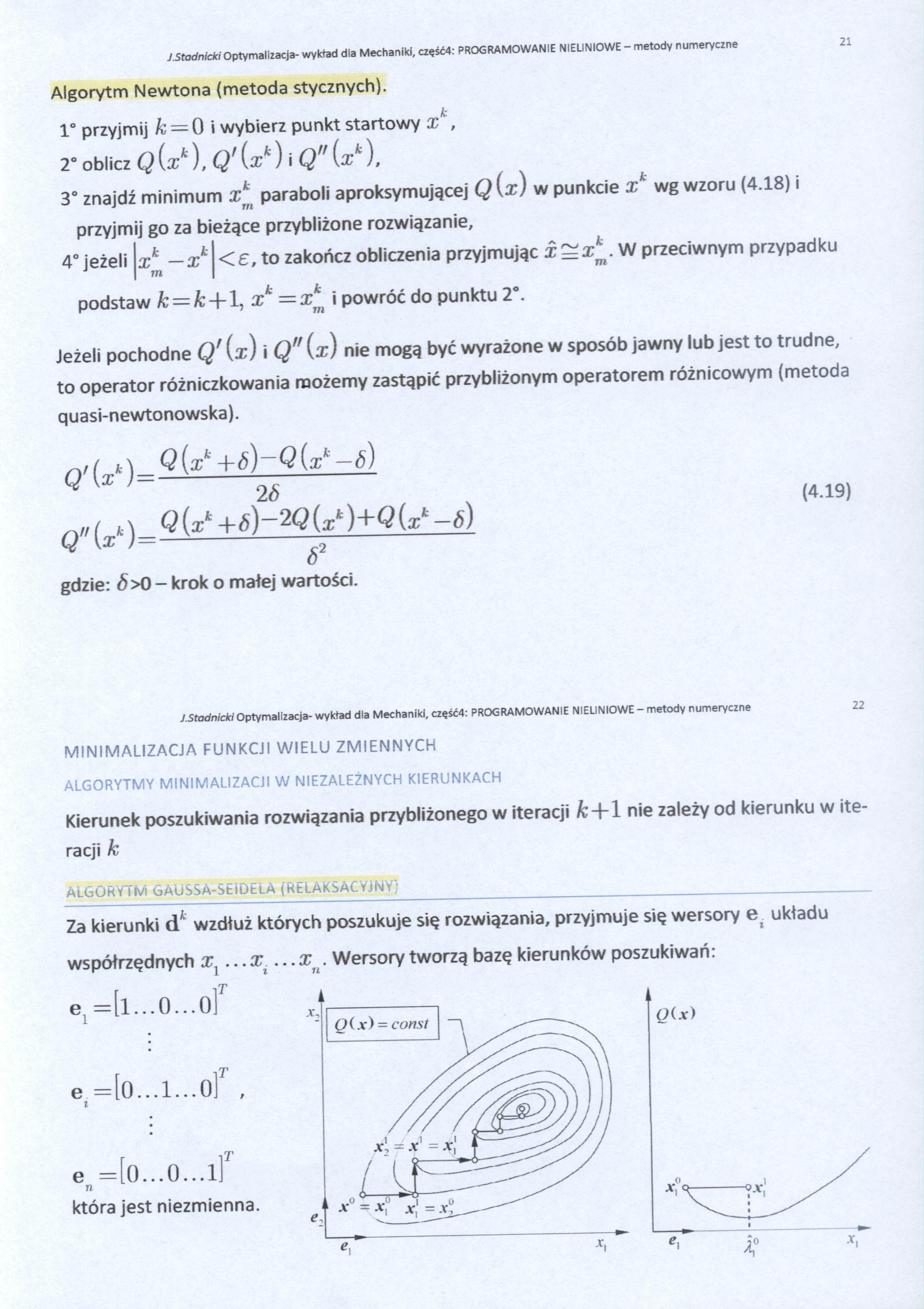
ALGORYTM GAUSSA-SEIDELA (RELAKSACYJNY)
Za kierunki d; wzdłuż których poszukuje się rozwiązania, przyjmuje się wersory e układu współrzędnych x ...X ...X . Wersory tworzą bazę kierunków poszukiwań:


e1=[l...0...of ei=[0...1...0f , e =[o___0___l]T
n
która jest niezmienna.
e\ x. x,
Wyszukiwarka
Podobne podstrony:
Image0005 (3) J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - me
Image0007 (3) X J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE -
Image0008 (3) J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE — me
Image0006 (3) J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - me
Image0009 (3) J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - me
Image0010 (3) J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE — me
67452 Image0001 J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE -
72795 Image0002 J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE -
Image0004 J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - metody
więcej podobnych podstron