Image0009 (3)
J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - metody numeryczne 17
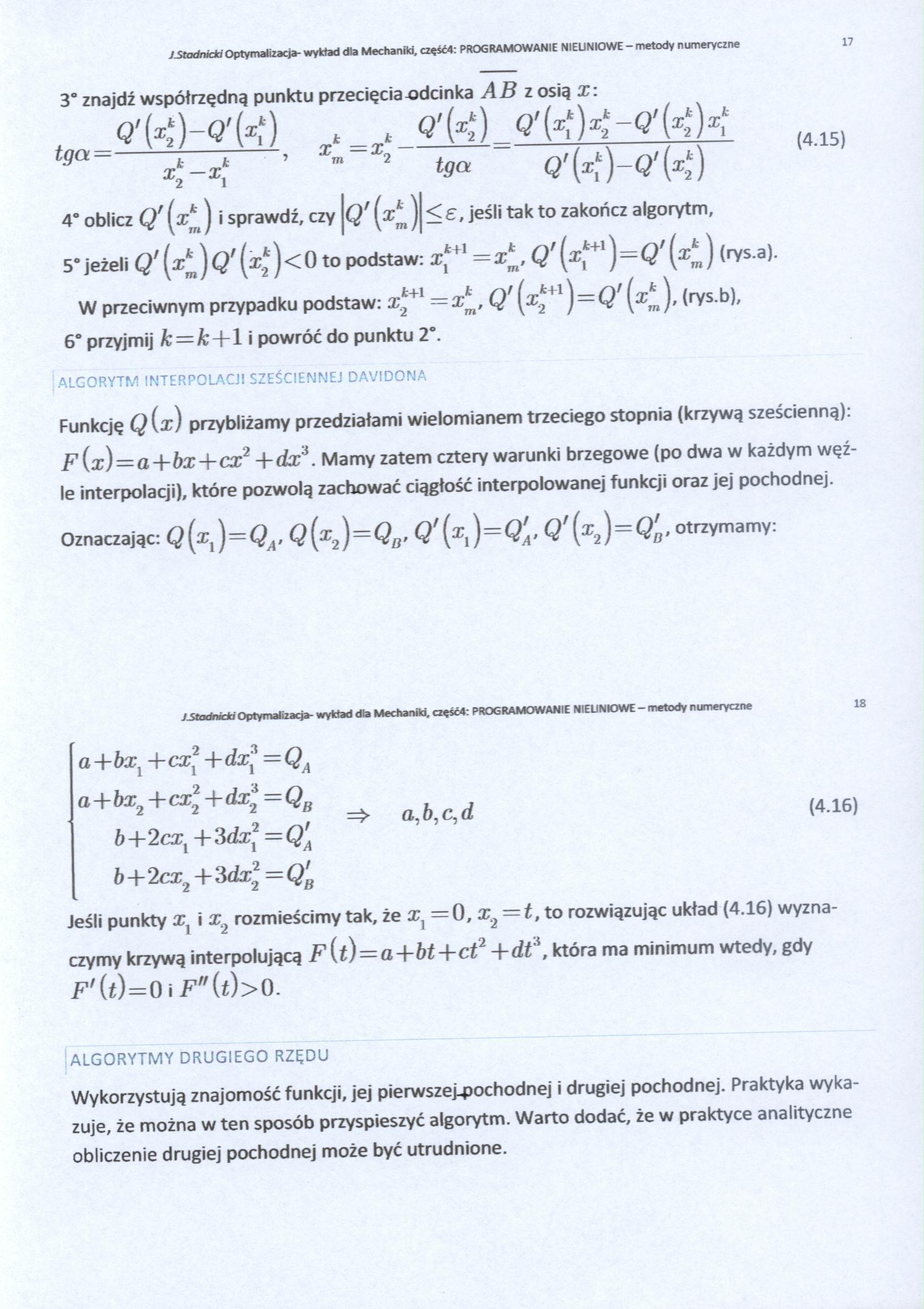
3° znajdź współrzędną punktu przecięcia odcinka AB z osią X:
Q,k)-Q,ixi)
tga
„k k
X —X 2 1
(4-15)
oblicz Qf [xkm j i sprawdź, czy |q; [xkm < 8, jeśli tak to zakończ algorytm,
jeżeli Q' (xkm ) Q' [x2 ) < 0 to podstaw: x\11 = Xkm, Q' ) = Q' ) (rys.a).
W przeciwnym przypadku podstaw: Xk+l = x'm, Qr [xk 11) = ), (rys.b),
6° przyjmij k = k-\-\ i powróć do punktu 2°.
ALGORYTM INTERPOLACJI SZEŚCIENNEJ DAV!DONA
Funkcję Q{x) przybliżamy przedziałami wielomianem trzeciego stopnia (krzywą sześcienną):
F(x) = a-\-bx-\-cx2 -ł-dxJ. Mamy zatem cztery warunki brzegowe (po dwa w każdym węźle interpolacji), które pozwolą zachować ciągłość interpolowanej funkcji oraz jej pochodnej.
Oznaczając: Q(x^ = Qą, Q (x.2 ) = Qa, Q' (x,) = Q'A, Q' (x.2) = Q'0, otrzymamy:
JStodntcki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - metody numeryczne
18
a +bx} -\-cx2 +dx* = QĄ a+bx2 +cx2 +dx2 = QB b+2 cx{ + 3dx2 = Q'ą b -|- 2 cx2 + 3 dx\ = Q'b
a, 6, c, d
(4.16)
Jeśli punkty x} i x,} rozmieścimy tak, że x} =0, x2 = t, to rozwiązując układ (4.16) wyznaczymy krzywą interpolującą F {t) — a-\-bt-\-ct2 + dt \ która ma minimum wtedy, gdy
F'{t) = {) i Fr,{t)>0.
ALGORYTMY DRUGIEGO RZĘDU
Wykorzystują znajomość funkcji, jej pierwszej-pochodnej i drugiej pochodnej. Praktyka wykazuje, że można w ten sposób przyspieszyć algorytm. Warto dodać, że w praktyce analityczne obliczenie drugiej pochodnej może być utrudnione.
Wyszukiwarka
Podobne podstrony:
Image0005 (3) J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - me
Image0007 (3) X J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE -
Image0008 (3) J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE — me
Image0011 (3) J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - me
Image0006 (3) J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - me
Image0010 (3) J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE — me
67452 Image0001 J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE -
72795 Image0002 J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE -
Image0004 J.Stadnicki Optymalizacja- wykład dla Mechaniki, część4: PROGRAMOWANIE NIELINIOWE - metody
więcej podobnych podstron