K 444b
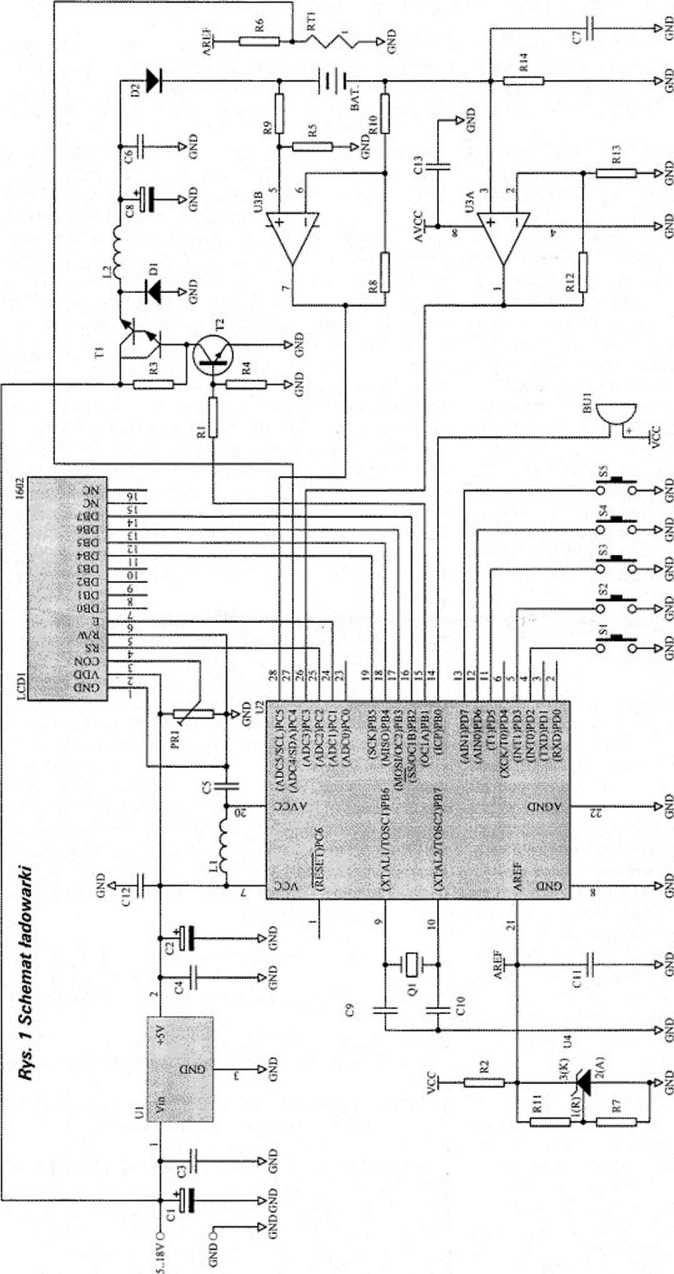
stor T2, który sterowany jest z procesora napięciem generatora szerokości impulsów (PWM). Pracuje on z częstotliwością ok. 15686 Hz ze zmiennym wypełnię-niem 1..99%. Kiedy w układzie znajduje się akumulator tworzy on dynamiczny dzielnik rezystan-cyjny (rezystancja wewnętrzna baterii oraz stan naładowania). Wartość napięcia jest tym wyższa, im szerszy jest impuls. W ten sposób regulujemy napięcie i prąd ładowania. Zastosowanie tej metody ogranicza straty mocy. Generator PWM jest sprzętowy, dlatego mamy więcej czasu na dokonywanie pomiarów. Procesor posiada układ czasowy. Co 15686 Hz następuje wywołanie przerwania T1 i w ten sposób odmierzane są sekundy. Licznik minut zwiększany jest co 60s, a godzin co 60 minut. Odmierzanie czasu odbywa się od momentu włączenia PWM. Dioda D1 (BY399) zabezpiecza przed pojawieniem się wysokiego napięcia samoindukcji L2, a dioda D2 (BY399) zabezpiecza przed niewłaściwym podłączeniem akumulatora. Dławik L2 tłumi zakłócenia wynikające z pracy PWM. Zmiany ustawień oraz trybu pracy dokonujemy przy pomocy mi-kroprzełączników S1..S5 podłączonych bezpośrednio do procesora. Wyświetlacz LCD1 oraz BUZER (BU1) służą do komunikacji z użytkownikiem. Układ powinien być zasilany napięciem stałym w zakresie 15..18V. Najlepiej stabilizowanym. W układzie znajduje się stabilizator 5V. Napięcie to zasila procesor i elementy podłączone bezpośrednio do niego. Zastosowanie wzmacniaczy operacyjnych typu LM358 podyktowane było tym, że wymagają on tylko jednego napięcia zasilania i może to być 5V. Do ładowania akumulatorów niezbędne są informacje o ich parametrach. Niewłaściwie kontrolowane parametry podczas ładowania mogą doprowadzić do skrócenia żywotności akumulatora lub jego uszkodzenia. Producenci akumulatorów podają w instrukcjach serwisowych dane dotyczące ładowania i rozładowania, mimo to podamy charakterystyczną ich cześć wspólną (dla
Wyszukiwarka
Podobne podstrony:
K 444b stor T2, który sterowany jest z procesora napięciem generatora szerokości impulsów
IMG 99$ wygaszana. Z tego układu sterowany jest wzmacniacz modulacji jaskrawości Z. Wzmocniony impul
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 359 sterujący wyłącza łączniki T, i T2 oraz
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 365 Segment 2b) Rys. 7.34. Falownik sterowan
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 337 szerokości impulsów mają wartość stalą,
7.5 FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 339 go, np. sinusoidalnego o częstotliwości
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 341 — dla k nieparzystych 7.5. FALOWNIKI
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 343 Fala napięcia wyjściowego może mieć post
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 345 Jeżeli uwzględnić, że 7.5. FALOWNIKI
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 347 Rys. 7.21. Modulacja sinusoidalna z
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 349 Amplitudy niektórych wyższych harmoniczn
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 351 przez krzywą schodkową, której obwiednią
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 353 Ponieważ częstotliwość pulsacji co-
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 355 00 Nj2 2U kn uwy(a)t)
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW Rys. 7.28. Przebiegi czasowe napięcia obwodu
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 361 gdzie: Um = maUm — amplituda napięcia
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 363 Wektor napięcia falownika może więc
7.5. FALOWNIKI NAPIĘCIA Z MODULACJĄ SZEROKOŚCI IMPULSÓW 367 Rys. 7.36. Przebieg napięcia fazowego i
więcej podobnych podstron