Ruch złożony, prędkość

I
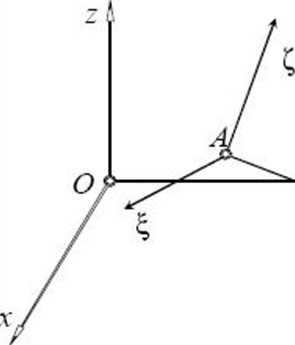
Rozpatrzmy punkt P poruszający się P względem pewnego
układu odniesienia
który to układ porusza się ^ względem
X] innego układu
odmesiema
Oxyz
Wielkości kinematy czne to wielkości występujące w kinematyce: tor. prędkość, pszyspieszenie. droga.
Wielkości kinematyczne bezwzględne to wielkości kinematyczne dotyczące poruszającego się punktu P odniesione do stałego układu odniesienia.
Wielkości kinematyczne względne to wielkości kinematyczne dotyczące poruszającego się punktu P odniesione do ruchomego układu odniesienia
Wielkości kinematyczne unoszenia to wielkości kinematyczne pizynależne temu punktowi mchomegc układu odniesienia, który w danej chwili pokrywa się z punktem P.
Inaczej mówiąc są to wielkości opisujące ruch układu ruchomego względem nieruchomego.
4

Ruch punktu P w układzie stałym nazwiemy ruchem bezwzględnym.
Ruch punktu P w ruchomym układzie ruchomym nazwiemy ruchem względnym.
Ruch układu ruchomego względem układu stałego nazwiemy ruchem unoszenia.
Prędkość punktu wyrażamy jako pochodną promienia wektora
rP = rA+pp
Uwzględniając reguły różniczkowania wektorów otrzymamy
Wyszukiwarka
Podobne podstrony:
226 roz9 Ruch zlozony p tu 9Ruch złożony punktu 9.1Wprowadzenie Punkt porusza się ruchem złożonym, j
Ruch złożony, prędkość, przyspieszenie Ruch złożony punktuW ruchu złożonym punktu prędkość bezwzględ
-a-Ruch złożony punktu AA w =lim- At Prędkość względna punktu A u =lim- At^O
Ruch złożony punktu Rozpatrzymy niezależnie dodatki do prędkości względnej i prędkości unos a) <
23 luty 07 (57) Następnie piszemy równanie prędkości punktu C, traktując ruch łącznika 2 jako ruch z
Ruch złożony punktu Dodatkowy obrót płaszczyzny o kąt A0 chwilowa oś obrotu b)
Ruch złożony punktu ■€?- Uzyskujemy wynik przyspieszenia dodatkowego jako superpozycje przyrostów
Ruch złożony punktu Algebra wektorowa v —U + w u =Vp + (<w Xr) v =v0
232 (57) 232 9. Ruch złożony punktu PRZYKŁAD 9.5 Prostokątna płyta obraca się wokół osi z ze stałą
236 (51) 236 9. Ruch złożony punktu Zadanie 9.1 o iWXl = jci = —r(o cos <ot v2 ROZWIĄZANIE Przy o
Slajd32 RUCH ZŁOŻONY PUNKTU 32
Slajd34 RUCH ZŁOZONY PUNKTU RUCH ZŁOZONY PUNKTU W układzie nieruchomym (x/y/z) -
Przy pominięciu oporów ruchu, jest to ruch złożony z ruchu jednostajnego z prędkością r0, w kierunku
więcej podobnych podstron