skanowanie0057 (2)
z
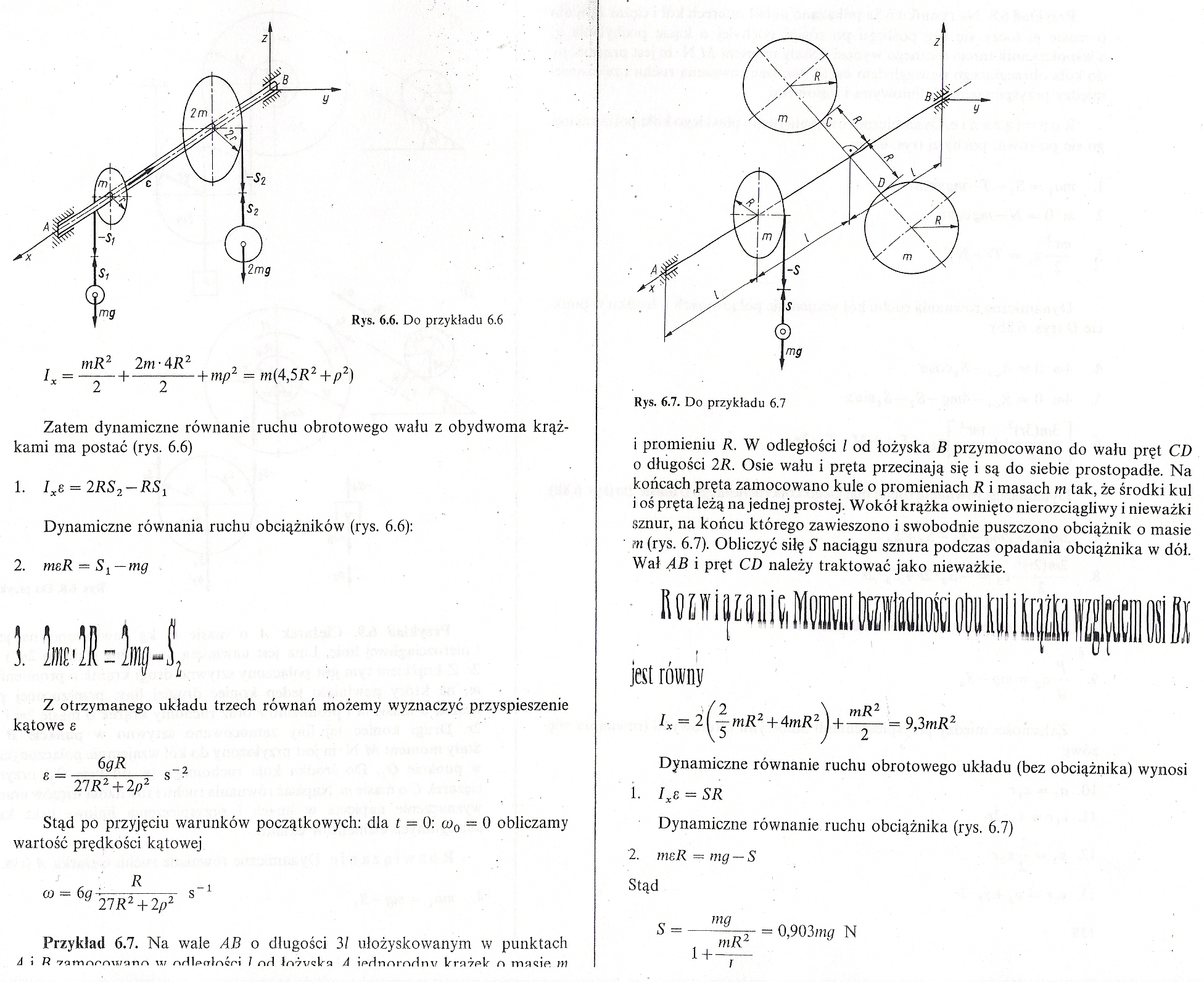
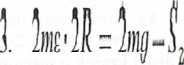
Rys. 6.6. Do przykładu 6.6

Zatem dynamiczne równanie ruchu obrotowego wału z obydwoma krążkami ma postać (rys. 6.6)
1. Ixe = 2RS2-RS1
Dynamiczne równania ruchu obciążników (rys. 6.6):
2. meR = Sl—mg
Z otrzymanego układu trzech równań możemy wyznaczyć przyspieszenie
kątowe e
6gR
8 27R2+2p2 S
-2
Stąd po przyjęciu warunków początkowych: dla t = 0: o)0 = 0 obliczamy wartość prędkości kątowej
-i
Przykład 6.7. Na wale AB o długości 31 ułożyskowanym w punktach

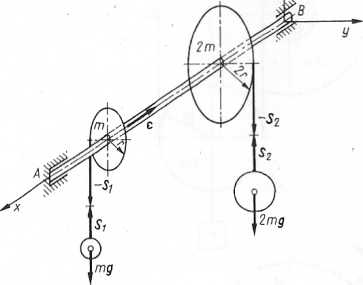
i promieniu R. W odległości / od łożyska B przymocowano do wału pręt CD
0 długości 2R. Osie wału i pręta przecinają się i są do siebie prostopadłe. Na końcach pręta zamocowano kule o promieniach R i masach m tak, że środki kul
1 oś pręta leżą na jednej prostej. Wokół krążka owinięto nierozciągliwy i nieważki sznur, na końcu którego zawieszono i swobodnie puszczono obciążnik o masie m (rys. 6.7). Obliczyć siłę S naciągu sznura podczas opadania obciążnika w dół. Wał AB i pręt CD należy traktować jako nieważkie.

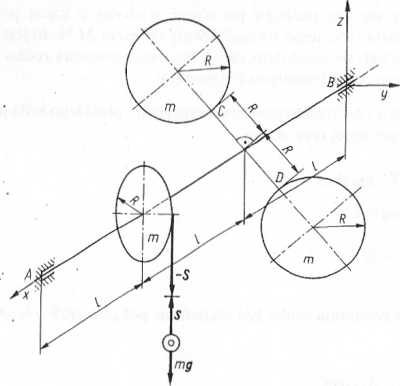
Rys. 6.7. Do przykładu 6.7
ii
jest równy
lx = 2 j^-j mR2+4mR2j+= 9,3 mR2
Dynamiczne równanie ruchu obrotowego układu (bez obciążnika) wynosi i. Ixs = SR
Dynamiczne równanie ruchu obciążnika (rys. 6.7)
2. meR — mg—S
Stąd
S = —= 0,903mg N mR2
T
Wyszukiwarka
Podobne podstrony:
skanowanie0054 I Rys. 6.2. Do przykładu 6.2, n/21.2 mm 2. wa^y- = mg-R 3. IQe — (R
skanowanie0054 I Rys. 6.2. Do przykładu 6.2, n/21.2 mm 2. wa^y- = mg-R 3. IQe — (R
skanowanie0059 (2) Dynamiczne równanie ruchu obrotowego krążków wzajemnie połączonych o środku w pun
25148 skanowanie0054 I Rys. 6.2. Do przykładu 6.2, n/21.2 mm 2. wa^y- = mg-R 3. IQ
skanowanie0054 I Rys. 6.2. Do przykładu 6.2, n/21.2 mm 2. wa^y- = mg-R 3. IQe — (R
25148 skanowanie0054 I Rys. 6.2. Do przykładu 6.2, n/21.2 mm 2. wa^y- = mg-R 3. IQ
skanowanie0061 (2) Dynamiczne równanie ruchu obrotowego krążka stałego mr2 4. &quo
DSC00580 w, Rys. 18.1 Przez analogię do dynamicznego równania ruchu punktu materialnego, wynikająceg
Misiak7 Rys. 3.4. Do przykładu 3.4 Prędkość punktu w ruchu unoszenia wynosii 3 k Uu = ul x r =
skanowanie0060 (2) Rozwiązanie. Dynamiczne równania ruchu płaskiego krążka toczącego się bez poślizg
skanowanie0053 Dynamika ruchu płaskiego ciała sztywnego 66.1. Dynamiczne równania ruchu płaskiego ci
więcej podobnych podstron