024 2
24
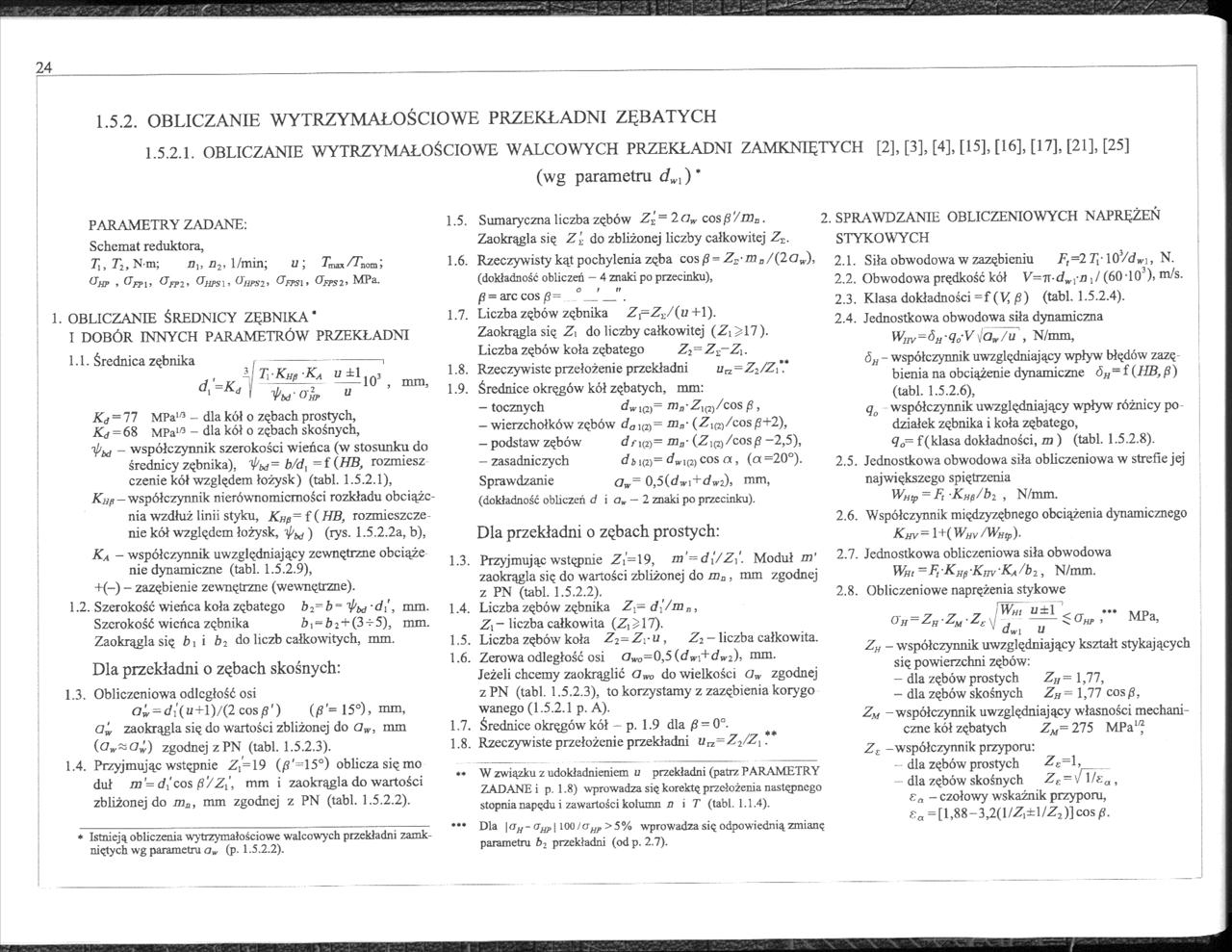
1.5.2. OBLICZANIE WYTRZYMAŁOŚCIOWE PRZEKŁADNI ZĘBATYCH
1.5.2.1. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI ZAMKNIĘTYCH [2], [3], [4], [15], [16], [17], [21], [25]
(wg parametru dwX) ’
-j Ti-Kup Ka u±\l , 1 u
1.3. Przyjmując wstępnie Z:’=19, m'=d\/Z\. Moduł m'
zaokrągla się do wartości zbliżonej do wa, mm zgodnej z PN (tabl. 1.5.2.2).
1.4. Liczba zębów zębnika Z.- <][/m „,
Z\ - liczba całkowita (Z, ^ 17).
1.5. Liczba zębów koła Z2= Z. u, Z2- liczba całkowita.
1.6. Zerowa odległość osi awo=0,5(dw\+dwi), nim.
Jeżeli chcemy zaokrąglić o1, do wielkości Cw zgodnej z PN (tabl. 1.5.2.3), to korzystamy z zazębienia korygo wanego (1.5.2.1 p. A).
1.7. Średnice okręgów kół - p. 1.9 dla p = 0°.
1.8. Rzeczywiste przełożenie przekładni ura=Z2/Z,.
• • W związku z udokładnieniem u przekładni (patrz PARAMETRY 7ADANE i p. 1.8) wprowadza się korektę przełożenia następnego stopnia napędu i zawartości kolumn a i T (tabl. 1.1.4).
••• Dla \aH‘Ołtf\\QOłaHt,>5% wprowadza się odpowiednią zmianę parametru b2 przekładni (od p. 2.7).
MPa,
HP »
PARAMETRY ZADANE:
Schemat reduktora,
T\, 72, N-m; nx, n2i 1/min; u j Tnua/7^omj Vhp , ^ft\, ®iips\• U)irs2» D/7y2> MPa.
1. OBLICZANIE ŚREDNICY ZĘBNIKA2
I DOBÓR INNYCH PARAMETRÓW PRZEKŁADNI
1.1. Średnica zębnika
d;=Kd
Kd = 17 MPa'° - dla kół o zębach prostych,
Kd = 68 MPa10 - dla kół o zębach skośnych,
Tf/U - współczynnik szerokości wieńca (w stosunku do średnicy zębnika), b/dx =f (WB, rozmiesz
czenie kół względem łożysk) (tabl. 1.5.2.1),
Kup - współczynnik nierównomicmości rozkładu obciążenia wzdłuż linii styku, Knp = f ( HB, rozmieszczenie kół względem łożysk, ) (rys. 1.5.2.2a, b),
Ka - współczynnik uwzględniający zewnętrzne obciążę nie dynamiczne (tabl. 1.5.2.9),
+(-) - zazębienie zewnętrzne (wewnętrzne).
1.2. Szerokość wieńca koła zębatego b2~b“ md\t mm.
Szerokość wieńca zębnika ńi“Ó2 + (3-^5), mm.
Zaokrągla się b\ i b2 do liczb całkowitych, mm.
Dla przekładni o zębach skośnych:
1.3. Obliczeniowa odległość osi
O2 = d/(u+1 )/(2 cosp') (/?'= 15°), mm,
Q'w zaokrągla się do wartości zbliżonej do aw, mm (aw2o+) zgodnej z PN (tabl. 1.5.2.3).
1.4. Przyjmując wstępnie Zt=19 (/?'=215°) oblicza się mo duł m = d,'cos p'/Zx\ mm i zaokrągla do wartości zbliżonej do mn, mm zgodnej z PN (tabl. 1.5.2.2).
1.5. Sumaryczna liczba zębów ZŹ~ 2ow cosp'/mD. Zaokrągla się Z,' do zbliżonej liczby całkowitej Zr.
1.6. Rzeczywisty kąt pochylenia zęba cos p» Zr /n0/(2ow.), (dokładność obliczeń - 4 znaki po przecinku),
P = 3IC COS /?=___
1.7. Liczba zębów zębnika Zf:ZK/(u+1).
Zaokrągla się Z\ do liczby całkowitej (Zx ^17).
Liczba zębów koła zębatego Z2 = ZE-2Zi.
1.8. Rzeczywiste przełożenie przekładni un—Z2/Z\2
1.9. Średnice okręgów kół zębatych, mm:
- tocznych dwl(2)= /nn-Zł(2)/cos p,
- wierzchołków zębów dOUXx = m„- (Z1(2)/cos/5+2),
- podstaw zębów drxm= ma- (Zjpj/cos/? -2,5),
-zasadniczych dbi&m dwX(2)Cos a, (a=20°).
Sprawdzanie aw= 0,5{dwX+dw2\ mm,
(dokładność obliczeń d i aw — 2 znaki po przecinku).
Dla przekładni o zębach prostych:
2. SPRAWDZANIE OBLICZENIOWYCH NAPRĘŻEŃ STYKOWYCH
2.1. Siła obwodowa w zazębieniu R,=2 712 \0vdW], N.
2.2. Obwodowa prędkość kół V=7T dw, /i|/(602103)» ®^s-
2.3. Klasa dokładności =f (V, p) (tabl. 1.5.2.4).
2.4. Jednostkowa obwodowa siła dynamiczna
WJIV=• Q0‘V 'IÓw7u , N/mm,
ó„ - współczynnik uwzględniający wpły w błędów zazę bienia na obciążenie dynamiczne óH = f (JIB, p) (tabl. 1.5.2.6),
qo współczynnik uwzględniający wpływ różnicy po działek zębnika i koła zębatego, q0~ f (klasa dokładności, m) (tabl. 1.5.2.8).
2.5. Jednostkowa obwodowa siła obliczeniowa w strefie jej największego spiętrzenia
WHtp = Ft KHfi/b2 , N/mm.
2.6. Współczynnik między/ębnego obciążenia dynamicznego
Km=\HWHV/W„p).
2.7. Jednostkowa obliczeniowa siła obwodowa
Wm —Ft'Kup‘Km'Ka b2, N/mm.
2.8. Obliczeniowe naprężenia stykowe
n ~7 7 7 l^HI U±1
<j„-ZttZMZc —
ZH - współczynnik uwzględniający kształt stykających się powierzchni zębów:
- dla zębów prostych Z/,= 1,77,
- dla zębów skośnych ZH 1,77 cos p,
ZM - współczynnik uwzględniający własności mechani czne kół zębatych ZM- 275 MPa12
Zt -współczynnik przyporu:
dla zębów prostych Zc=\,
dla zębów skośnych ZF - v ,
En - czołowy wskaźnik przyporu, ra=[l,88-3,2(l/Zl±l/Z2)]cos^.
niętych wg parametru aw (p. 1.5.2.2).
Istnieją obliczenia wytrzymałościowe walcowych przekładni zamk
Wyszukiwarka
Podobne podstrony:
024 3 241.5.2. OBLICZANIE WYTRZYMAŁOŚCIOWE PRZEKŁADNI ZĘBATYCH 1.5.2.1. OBLICZANIE WYTRZYMAŁOŚCIOWE
024 4 241.5.2. OBLICZANIE WYTRZYMAŁOŚCIOWE PRZEKŁADNI ZĘBATYCH1.5.2.1. OBLICZANIE WYTRZYMAŁOŚCIOWE
024 2 1.5.2. OBLICZANIE WYTRZYMAŁOŚCIOWE PRZEKŁADNI ZĘBATYCH1.5.2.1. OBLICZANIE WYTRZYMAŁOŚCIOWE WAL
kurmaz024 241.5.2. OBLICZANIE WYTRZYMAŁOŚCIOWE PRZEKŁADNI ZĘBATYCH1.5.2.1. OBLICZANIE WYTRZYMAŁOŚCIO
71942 Str061 (7) 61 5.3. OBLICZANIE WYTRZYMAŁOŚCIOWE PRZEKŁADNI ZĘBATYCH 5.3.1. OBLICZANIE WALCOWYCH
4.11. PRZYKŁADY OBLICZEŃ WYTRZYMAŁOŚCIOWYCH PRZEKŁADNI ZĘBATYCH 263 Przyjmujemy szerokość wieńca b =
4.11. PRZYKŁADY OBLICZEŃ WYTRZYMAŁOŚCIOWYCH PRZEKŁADNI ZĘBATYCH 265 7. Obliczenie obciążenia
4.11. PRZYKŁADY OBLICZEŃ WYTRZYMAŁOŚCIOWYCH PRZEKŁADNI ZĘBATYCH 267 a współczynnik Zp ze wzoru
4.11. PRZYKŁADY OBLICZEŃ WYTRZYMAŁOŚCIOWYCH PRZEKŁADNI ZĘBATYCH TABLICA 4.19. Zestawienie wymiarów
więcej podobnych podstron