052 053 2
52 Programowanie liniowe
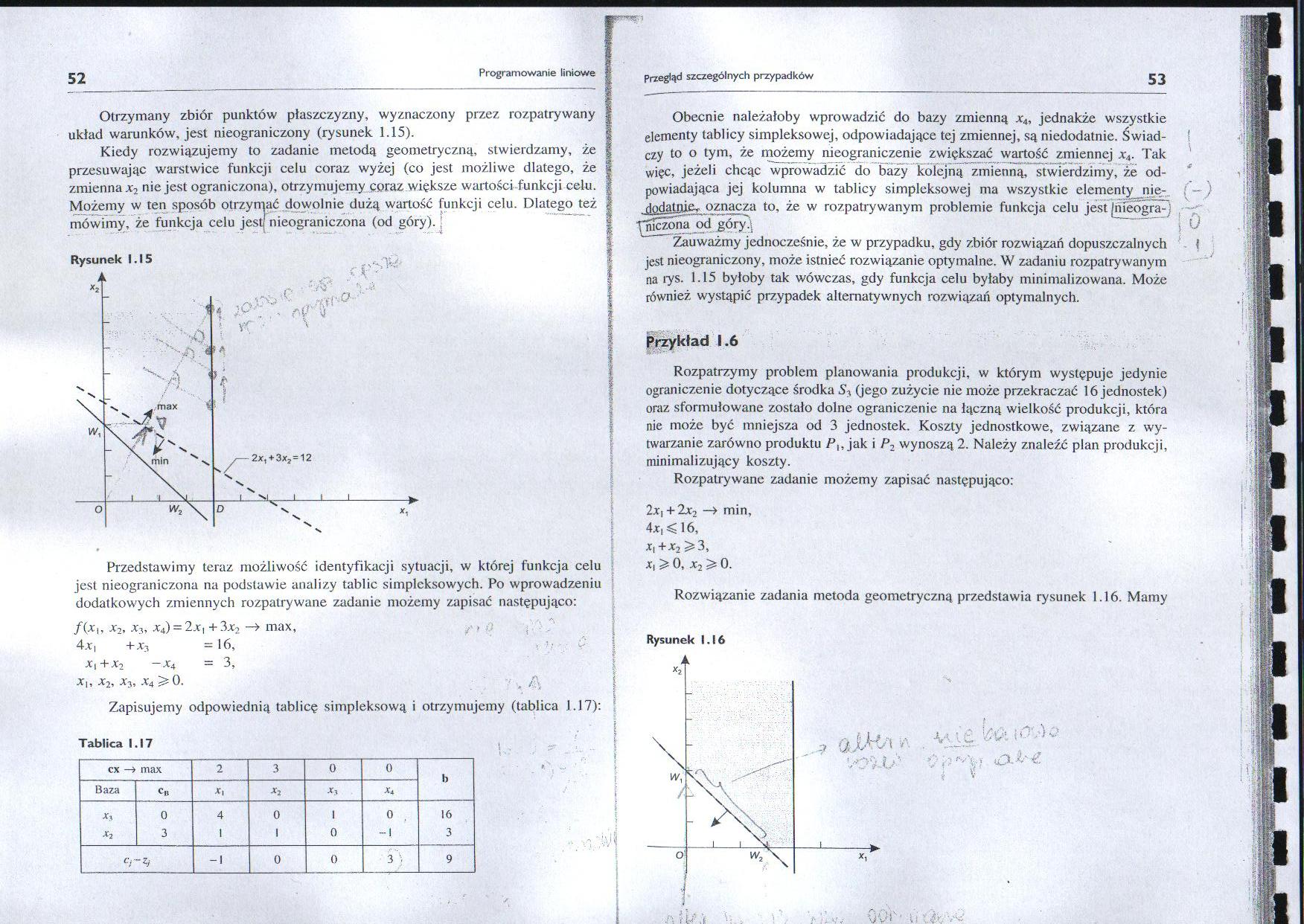
Otrzymany zbiór punktów płaszczyzny, wyznaczony przez rozpatrywany układ warunków, jest nieograniczony (rysunek 1.15).
Kiedy rozwiązujemy to zadanie metodą geometryczną, stwierdzamy, że przesuwając warstwice funkcji celu coraz wyżej (co jest możliwe dlatego, że zmienna x2 nie jest ograniczona), otrzymujemy coraz większe wartości funkcji celu. Możemy w ten sposób otrzymać dowolnie dużą wartość funkcji celu. Dlatego też mówimy, że funkcja celu jestj nieograniczona (od góry). ;
Przedstawimy teraz możliwość identyfikacji sytuacji, w której funkcja celu jest nieograniczona na podstawie analizy tablic simpleksowych. Po wprowadzeniu dodatkowych zmiennych rozpatrywane zadanie możemy zapisać następująco:
/(X|, x2, x3, x4) = 2x, + 3x2 —» max, f > n ■ :
4jC| +x3 =16, >. |
x,+x2 —x4 = 3,
xb x2, x2, x4 ^0. > /?>
' • * |
Zapisujemy odpowiednią tablicę simpleksową i otrzymujemy (tablica 1.17):
Tablica 1.17
|
cx —> |
max |
2 |
3 |
0 |
0 |
|) |
|
Baza |
C« |
x, |
Xl |
*3 |
Xt | |
|
*3 |
0 |
4 |
0 |
i |
0 |
16 |
|
3 |
1 |
1 |
0 |
-1 |
3 | |
|
C, |
-Z/ |
-1 |
0 |
0 |
3 ■ |
9 |
j
I
f
[
Obecnie należałoby wprowadzić do bazy zmienną xĄ, jednakże wszystkie
elementy tablicy simpleksowej, odpowiadające tej zmiennej, są niedodatnie. Świad- I czy to o tym, że możemy nieograniczenie zwiększać wartość zmiennej x4. Tak więc, jeżeli chcąc wprowadzić do bazy kolejną zmienną, stwierdzimy, że od-

powiadająca jej kolumna w tablicy simpleksowej ma wszystkie elementy nie-rlodatnie- oznacza to, że w rozpatrywanym problemie funkcja celu jest |nfeogrj£) -od góry .;
Zauważmy jednocześnie, że w przypadku, gdy zbiór rozwiązań dopuszczalnych 1 jest nieograniczony, może istnieć rozwiązanie optymalne. W zadaniu rozpatrywanym na rys. 1.15 byłoby tak wówczas, gdy funkcja celu byłaby minimalizowana. Może również wystąpić przypadek alternatywnych rozwiązań optymalnych.
Przykład 1.6
Rozpatrzymy problem planowania produkcji, w którym występuje jedynie ograniczenie dotyczące środka S3 Geg° z.użycie nie może przekraczać 16 jednostek) oraz sformułowane zostało dolne ograniczenie na łączną wielkość produkcji, która nie może być mniejsza od 3 jednostek. Koszty jednostkowe, związane z wytwarzanie zarówno produktu P,, jak i P2 wynoszą 2. Należy znaleźć plan produkcji, minimalizujący koszty.
Rozpatrywane zadanie możemy zapisać następująco:
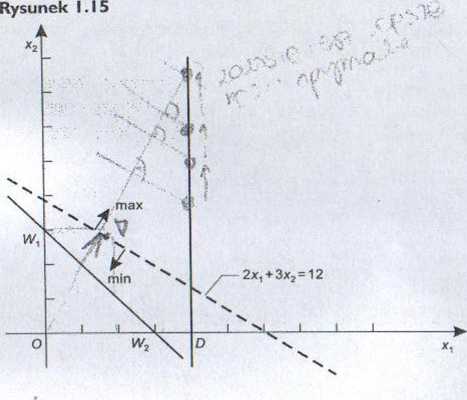
2*| +2jc2 —> min, 4xi < 16, x,+x2 >3,
Xi ^ 0, x2 3* 0.
Rozwiązanie zadania metoda geometryczną przedstawia rysunek 1.16. Mamy
Rysunek 1.16

Wyszukiwarka
Podobne podstrony:
slajd53 (52) KRZYWE STOŻKOWE - parabola - to zbiór punktów płaszczyzny, równo odległych od stałego&n
052 053 52 Eliza Mytych. Ludwik Kumański Rozdział 3. Charakterystyki czasowe i częstotliwościowe53 O
052 053 52 Prz-ykład 2.6 -
slajd82 (8) KRZYWE STOŻKOWE - hiperbola - to zbiór punktów płaszczyzny, których różnica od
59282 slajd10 (94) KRZYWE STOŻKOWE - elipsa - to zbiór punktów płaszczyzny, których odległość od dwó
Zagadnienie programowania liniowego Wystarczy znaleźć współrzędne wierzchołków, wyznaczyć dla nich
9. Zbiór punktów płaszczyzny leżących w równej odległości od ramion kąta. 14. Może
Wykresem funkcji / jest zbiór punktów płaszczyzny (podzbiór produktu kartezjańskiego
024 025 2 24 Programowanie liniowe1.2.2. Zbiór rozwiązań dopuszczalnych W zadaniu rozpatrywanym w pr
040 041 2 40 Programowanie liniowe Iteracja 3 Sprawdzamy, czy otrzymane rozwiązanie bazowe: jc, =4,
052 053 ESGBES INFLACJA Derw INFLACJA Lwa i Rys. 7.8. Wykres szeregu czasowego INFLACJA oraz jego tr
060 061 2 60 Programowanie liniowe Ustalimy, jakie kombinacje wartości parametrów r, i c2 pozwalają
084 085 2 84 Programowanie liniowe simpleks. Zmienną opuszczającą bazę jest x2. Otrzymujemy wówczas
092 093 2 92 Programowanie liniowe Chcąc ustalić, dla jakich wartości / otrzymana baza, w skład któr
098 099 2 ■M 98 Programowanie liniowe Przedziały, na które podzielony został zbiór parametrów,
więcej podobnych podstron