059(1)
Prędkość v i przyśpieszenie w punktu znajdziemy, obliczając pierwszą i drugą pochodną r względem /; mamy
Zatem punkt porusza się po linii prostej ze stałą prędkością, której
moduł wynosi |t>| = |/32+(—4)2 = 5.
2) W tym przypadku torem punktu jest elipsa, określona równaniami parametrycznymi = 2cos/, z = sin/ lub też równaniem ^-+22=1.
Elipsa ta leży na płaszczyźnie xOz.
Punkt ma prędkość v = ż = —2sin ż • i+cos/ • k i przyśpieszenie w =
— r — —2cos/ • i—sin/ • k.
3) Równania parametryczne toru punktu x = 2/2—3, y — —3l2, z =
= 4/2—5 po wprowadzeniu nowego parametru tx = t2 przyjmą postać x= = 2ti—3, y == —3tu z = -ltl—5 lub, po wyrugowaniu parametru,
-iii = skąd wynika, że torem punktu jest linia prosta.
Punkt porusza się z prędkością v = r = 4/j—6//+8/A; przyśpieszenie ruchu w = 'r= 4/—6/+8A jest stale (nie zależy od czasu /).
Mamy więc tu do czynienia z ruchem prostoliniowym jednostajnie przyśpieszonym.
4) Torem punktu jest tu linia śrubowa ,v = asinw/, y — acoscof, z = bt nawinięta na walec kołowy. Prędkość punktu v = r = aco coscof • /—
— aa> sino>/ -j+bk, a przyśpieszenie w = ? = — ao>2sinw/ • i—aa>2coscot ■/. Ruch punktu jest jednostajny, ponieważ moduł prędkości |v| =
= t a2(oZjrb2 ma wartość stalą.
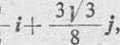
298. Znając równanie ruchu punktu r = cos3/ • t+sin3/ • j wykreślić tor punktu oraz wektory prędkości i przyśpieszenia w chwili t = nf6 i t — yr/4.
Torem punktu, czyli hodografem wektora r jest asteroida x = cos3/, y = sin3/.
W dowolnej chwili / punkt ma prędkość v = r = —3cos2/sin/• i+ -f- 3 sin2 / cos / • j i przyśpieszenie w> = r = 3 cos / (3 sin2 / — 1) i + +3 sin /(3cos2/—1)/\
Dla / = ji/6, otrzymujemy
9
H> =
3]/3
8

v = -ttf (/—0.
2]/2 2 J 2
Tor punktu oraz wektory prędkości z przyśpieszenia punktu w chwili t = rr/6 i t — nj4 zostały pokazane na rys. 48.
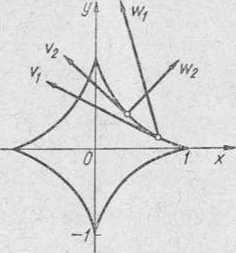
Rys. 48
W zad. 299—301 mając dane równania wektorowe ruchu punktu wykreślić tor punktu oraz wektory prędkości i przyśpieszenia w chwili t = 0 i t = 1.
299. r = acost • i+asin/ •/
300. r = 3tj+(4t-t2)k
301. r = 3(f—sin/)/+3(l— cosf)y
Wyszukiwarka
Podobne podstrony:
Slajd11 Rrzyklod 14. I. Obliczyć prędkość i przyspieszenie punktu B mechanizmu korbowo-wodzikowego
Mechanika kolo gr A -■ ...... ■ 1. Wyznacz i narysuj wektory prędkości i przyspieszenia punktu D w d
Mechanika kolo gr B 1. Wyznacz i narysuj wektory prędkości i przyspieszenia punktu D w danym położen
gr B V,a i motocykl Zad. 1 Znaleźć dla zadanego położenia prędkość i przyspieszenie punktu B i C.0v
Mechanika kolo gr A -■ ...... ■ 1. Wyznacz i narysuj wektory prędkości i przyspieszenia punktu D w d
Prędkość i przyśpieszenie punktu w układzie naturalnym Ruch płaski Rys.25 Przyśpieszenie styczne i
5.2.1. Tor, prędkość i przyśpieszenie punktu Rozpatrzmy ruch punktu materialnego względem przyjętego
Ruch płaski, prędkość i przyspieszenie punktu bryły %Ruch płaski bryły materialnejRuch płaski biyly
zad 1 Kinematyka Bbd. 1 (KINEMATYKA) Znaleźć dla zadanego położenia mechanizmu prędkość i przyspiesz
Prędkość i przyspieszenie punktu we współrzędnych biegunowych Zakładamy iż pkt. A porusza się w
Porównanie składowych prędkości i przyspieszenia punktu w układach: biegunowym
mbm rok nizej Zad. 1. Dla zadanego mechanizmu (jak na rys.) wyznaczyć prędkość i przyspieszenie
prędkość i przyspieszenie punktu materialnego (2) 1 Prędkość punktu materialnego 1 Prędkość punktu m
DSC00294 (17) wym jednostajnym, z prędkością kątową <o = const. Wyznaczyć prędko^ i przyspieszeni
więcej podobnych podstron