132 2
258
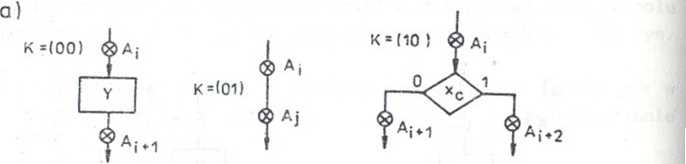
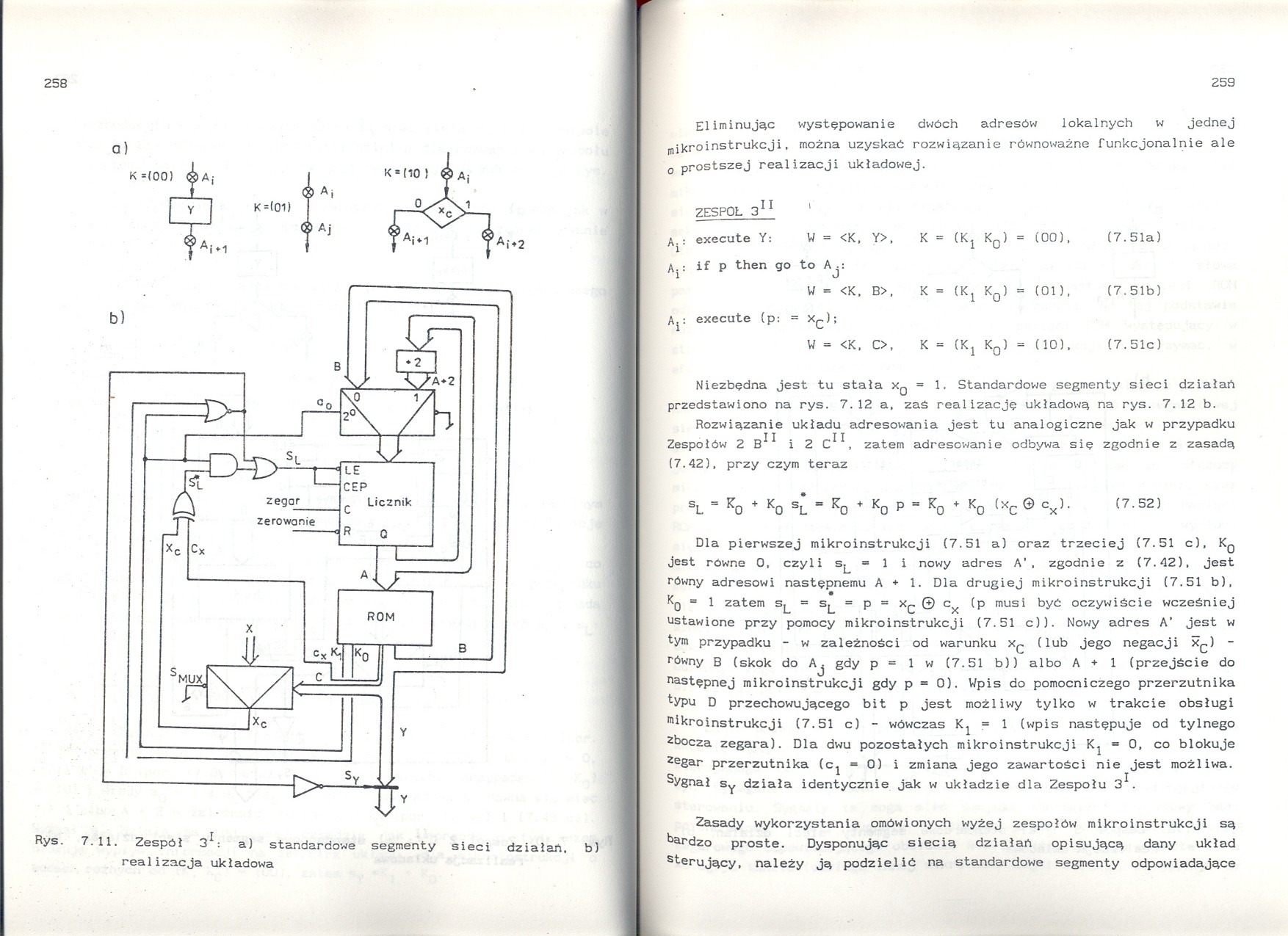
Rys. 7
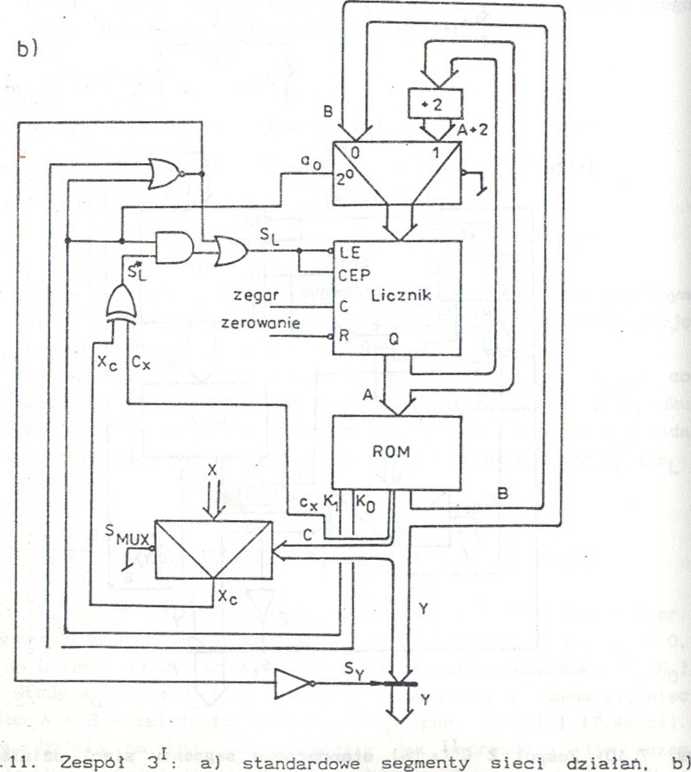
realizacja układowa
Eliminując występowanie dwóch adresów lokalnych w jednej makroinstrukcji, można uzyskać rozwiązanie równoważne funkcjonalnie ale 0 prostszej realizacji układowej.
ZESPÓL 311
|
execute Y: |
W = <K, |
Y>, |
K = (Kj |
O O II O |
(7.51a) |
|
if p then go |
to A.: J | ||||
|
V II 73: |
B>, |
K = (K1 |
o II "o |
(7.51b) | |
|
execute (p: = |
xc); | ||||
|
II A 7* |
c>. |
7^ II |
o II o |
(7.51c) |
Niezbędna jest tu stała Xg = 1. Standardowe segmenty sieci działań przedstawiono na rys. 7.12 a, zaś realizację układową na rys. 7.12 b.
Rozwiązanie układu adresowania jest tu analogiczne jak w przypadku Zespołów 2 i 2 C**, zatem adresowanie odbywa się zgodnie z zasadą
(7.42), przy czym teraz
SL = K0 * K0 SL = ^0 + K0 P = ^0 + K0 (XC © cxK (7’52)
Dla pierwszej mikroinstrukcji (7.51 a) oraz trzeciej (7.51 c), Kq jest równe 0, czyli s^ = 1 i nowy adres A’, zgodnie z (7.42), jest równy adresowi następnemu A + 1. Dla drugiej mikroinstrukcji (7.51 b), Kg = 1 zatem s^ = s^ = p = Xę © cx (p musi być oczywiście wcześniej ustawione przy pomocy mikroinstrukcji (7.51 c)). Nowy adres A’ jest w tym przypadku - w zależności od warunku x^ (lub jego negacji Xę) -równy B (skok do Aj gdy p = 1 w (7.51 b)) albo A + 1 (przejście do następnej mikroinstrukcji gdy p = 0). Wpis do pomocniczego przerzutnika typu D przechowującego bit p jest możliwy tylko w trakcie obsługi mikroinstrukcji (7.51 c) - wówczas = 1 (wpis następuje od tylnego zbocza zegara). Dla dwu pozostałych mikroinstrukcji Kj = 0, co blokuje 2egar przerzutnika (c^ = 0) i zmiana jego zawartości nie jest możliwa. Sygnał Sy działa identycznie jak w układzie dla Zespołu 3*.
Zasady wykorzystania omówionych wyżej zespołów mikroinstrukcji są bardzo proste. Dysponując siecią działań opisującą dany układ sterujący, należy ją podzielić na standardowe segmenty odpowiadające
Wyszukiwarka
Podobne podstrony:
ekologia5 Rys. 7.28. Przykład łącznego występowania populacji dwóch gatunków koniczyny (Trifolńim).
138 139 138 Trójstanowe multipleksery 251, 253, 257, 258 aą realizowane według zasady z rys. 5.9, pr
138 139 138 Trójstanowa multipleksery 231. 253. 257. 258 są realizowane według zasady z rys. 5>9i
CCF20100328�001 Rys. 7.28. Przykład łącznego występowania populacji dwóch gatunków koniczyny (Trifol
*3 Rys.1*5. Występowanie dwóch podstawowych typów dachów w budownictwie wiejskim w Polsce: I - dachy
157 3 310 Rys. 3.96. Realizacja układów kombinacyjnych na dekoderach/demultiplekserach według dekomp
127 3 248 Rys. 7.6. Zespół 1: a) standardowy segment sieci działań, b) realizacja układowa czyi i A
128 2 250b) Rys. 7.7. Zespól 2A: a) standardowe segmenty sieci działań, b) realizacja układowa 1 •
147 3 2S8 / y1 = SG, y2 = SD. Xj = m0, x2 = mi * x3 d x4 = c0’ x5 = C1‘ (7.64) Realizacja układowa
więcej podobnych podstron