2tom139
5. MASZYNY ELEKTRYCZNE 280
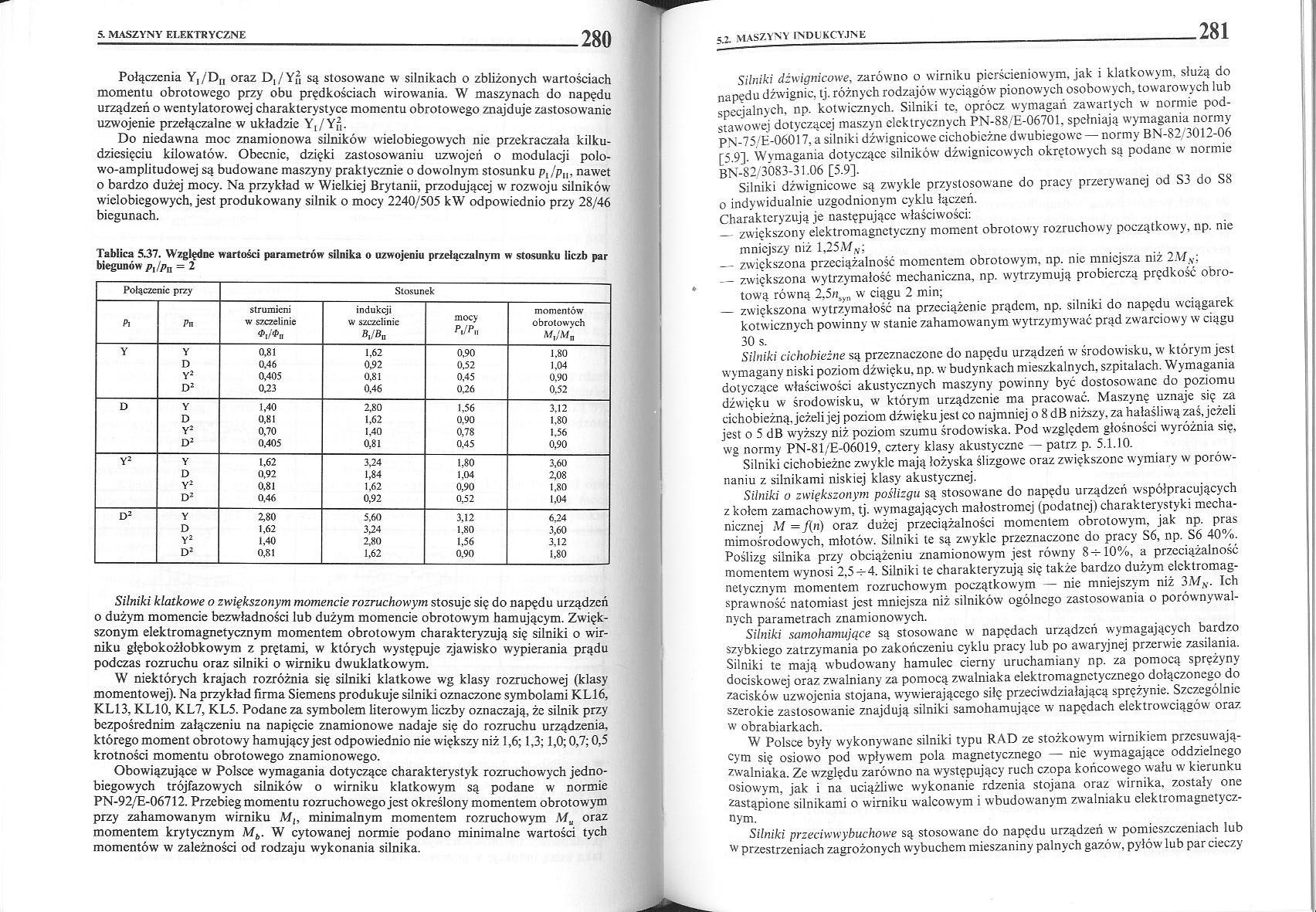
Połączenia Y,/D„ oraz D, / Y,2, są stosowane w silnikach o zbliżonych wartościach momentu obrotowego przy obu prędkościach wirowania. W maszynach do napędu urządzeń o wentylatorowej charakterystyce momentu obrotowego znajduje zastosowanie uzwojenie przełączalne w układzie Y,/Y,2,.
Do niedawna moc znamionowa silników wielobiegowych nie przekraczała kilkudziesięciu kilowatów. Obecnie, dzięki zastosowaniu uzwojeń o modulacji polo-wo-amplitudowej są budowane maszyny praktycznie o dowolnym stosunku p,/pH. nawet o bardzo dużej mocy. Na przykład w Wielkiej Brytanii, przodującej w rozwoju silników wielobiegowych, jest produkowany silnik o mocy 2240/505 kW odpowiednio przy 28/46 biegunach.
Tablica 5.37. Względne wartości parametrów silnika o uzwojeniu przełączalnym w stosunku liczb par biegunów pjpa = 2
|
Połączenie przy |
Stosunek | ||||
|
strumieni |
indukcji |
mocy |
momentów | ||
|
Pi |
Pn |
w szczelinie *i/*n |
w szczelinie BJBu |
obrotowych | |
|
Y |
Y |
0,81 |
1,62 |
0,90 |
1.80 |
|
D |
0,46 |
0,92 |
0,52 |
1.04 | |
|
Y2 |
0,405 |
0,81 |
0,45 |
0.90 | |
|
D2 |
0,23 |
0,46 |
0,26 |
0,52 | |
|
D |
Y |
1,40 |
2,80 |
1.56 |
3.12 |
|
D |
0,81 |
1.62 |
0.90 |
1.80 | |
|
Y2 |
0,70 |
1,40 |
0.78 |
1.56 | |
|
D2 |
0,405 |
0,81 |
0,45 |
0,90 | |
|
Y2 |
Y |
1.62 |
3,24 |
1.80 |
3,60 |
|
D |
0,92 |
1,84 |
1,04 |
2,08 | |
|
Y2 |
0.81 |
1,62 |
0,90 |
1,80 | |
|
D2 |
0,46 |
0,92 |
0,52 |
1,04 | |
|
D2 |
Y |
2,80 |
5,60 |
3.12 |
6,24 |
|
D |
1,62 |
3,24 |
1,80 |
3,60 | |
|
Y2 |
1.40 |
2,80 |
1.56 |
3,12 | |
|
D2 |
0,81 |
1,62 |
0,90 |
1.80 | |
Silniki klatkowe o zwiększonym momencie rozruchowym stosuje się do napędu urządzeń o dużym momencie bezwładności lub dużym momencie obrotowym hamującym. Zwiększonym elektromagnetycznym momentem obrotowym charakteryzują się silniki o wirniku głębokożłobkowym z prętami, w których występuje zjawisko wypierania prądu podczas rozruchu oraz silniki o wirniku dwuklatkowym.
W niektórych krajach rozróżnia się silniki klatkowe wg klasy rozruchowej (klasy momentowej). Na przykład firma Siemens produkuje silniki oznaczone symbolami KL16, KL13, KLIO, KL7, KL5. Podane za symbolem literowym liczby oznaczają, że silnik przy bezpośrednim załączeniu na napięcie znamionowe nadaje się do rozruchu urządzenia, którego moment obrotowy hamujący jest odpowiednio nie większy niż 1,6; 1,3; 1,0; 0,7; 0,5 krotności momentu obrotowego znamionowego.
Obowiązujące w Polsce wymagania dotyczące charakterystyk rozruchowych jedno-biegowych trójfazowych silników o wirniku klatkowym są podane w normie PN-92/E-06712. Przebieg momentu rozruchowego jest określony momentem obrotowym przy zahamowanym wirniku M,, minimalnym momentem rozruchowym Mu oraz momentem krytycznym Mb. W cytowanej normie podano minimalne wartości tych momentów w zależności od rodzaju wykonania silnika.
Silniki dźwignicowe, zarówno o wirniku pierścieniowym, jak i klatkowym, służą do napędu dźwignic, tj. różnych rodzajów wyciągów pionowych osobowych, towarowych lub specjalnych, np. kotwicznych. Silniki te, oprócz wymagań zawartych w normie podstawowej dotyczącej maszyn elektrycznych PN-88/E-06701, spełniają wymagania normy PN-75./E-06017, a silniki dźwignicowe cichobieżne dwubiegowc — normy BN-82/3012-06 [5.9], Wymagania dotyczące silników' dźwignicowych okrętowych są podane w normie BN-82/3083-31.06 [5.9].
Silniki dźwignicowe są zwykle przystosowane do pracy przerywanej od S3 do S8 o indywidualnie uzgodnionym cyklu łączeń.
Charakteryzują je następujące właściwości:
— zwiększony elektromagnetyczny moment obrotowry rozruchowy początkowy, np. nie mniejszy niż 1,2534*:
— zwiększona przeciążalność momentem obrotowym, np. nie mniejsza niż 2MV;
— zwiększona wytrzymałość mechaniczna, np. wytrzymują probierczą prędkość obrotową równą 2,5nsy„ w ciągu 2 min;
— zwiększona wytrzymałość na przeciążenie prądem, np. silniki do napędu wciągarek kotwicznych powinny w stanie zahamowanym wytrzymywać prąd zwarciowy w ciągu 30 s.
Silniki cichobieżne są przeznaczone do napędu urządzeń w środowisku, w którym jest w ymagany niski poziom dźwięku, np. w' budynkach mieszkalnych, szpitalach. Wymagania dotyczące właściwości akustycznych maszyny powinny być dostosowane do poziomu dźwięku w środowisku, w którym urządzenie ma pracować. Maszynę uznaje się za cichobieżną, jeżeli jej poziom dźwięku jest co najmniej o 8 dB niższy, za hałaśliwą zaś, jeżeli jest o 5 dB w'yższy niż poziom szumu środowiska. Pod względem głośności wyróżnia się, wg normy PN-81/E-06019, cztery klasy akustyczne — patrz p. 5.1.10.
Silniki cichobieżne zwykle mają łożyska ślizgowe oraz zwiększone wymiary w porównaniu z silnikami niskiej klasy akustycznej.
Silniki o zwiększonym poślizgu są stosowane do napędu urządzeń współpracujących z kołem zamachowym, tj. wymagających małostromej (podatnej) charakterystyki mechanicznej M = f(n) oraz dużej przeciążalności momentem obrotowym, jak np. pras mimośrodowych, młotów'. Silniki te są zwykle przeznaczone do pracy S6, np. S6 40%. Poślizg silnika przy obciążeniu znamionowym jest równy 8-^10%, a przeciążalność momentem wynosi 2,5 -5-4. Silniki te charakteryzują się także bardzo dużym elektromagnetycznym momentem rozruchowym początkowym — nie mniejszym niż 3M*. Ich sprawność natomiast jest mniejsza niż silników ogólnego zastosowania o porównywalnych parametrach znamionowych.
Silniki samohamujące są stosowane w napędach urządzeń wymagających bardzo szybkiego zatrzymania po zakończeniu cyklu pracy lub po awaryjnej przerwie zasilania. Silniki te mają wbudowany hamulec cierny uruchamiany np. za pomocą sprężyny dociskowej oraz zwalniany za pomocą zwalniaka elektromagnetycznego dołączonego do zacisków uzwojenia stojana, wywierającego siłę przeciwdziałającą sprężynie. Szczególnie szerokie zastosowanie znajdują silniki samohamujące w napędach elektrowciągów oraz w obrabiarkach.
W Polsce były wykonywane silniki typu RAD ze stożkowym wirnikiem przesuwającym się osiowo pod wpływem pola magnetycznego — nie wymagające oddzielnego zwalniaka. Ze względu zarówno na występujący ruch czopa końcowego wału w kierunku osiowym, jak i na uciążliwe wykonanie rdzenia stojana oraz wirnika, zostały one zastąpione silnikami o wirniku walcowym i wbudowanym zwalniaku elektromagnetycznym.
Silniki przeciwwybuchowe są stosowane do napędu urządzeń w pomieszczeniach lub w przestrzeniach zagrożonych wybuchem mieszaniny palnych gazów, pyłów lub par cieczy
Wyszukiwarka
Podobne podstrony:
2tom130 5. MASZYNY ELEKTRYCZNE 262 Rys. 5.16. Stopień obciążenia kp silnika w zależności od względne
2tom138 5. MASZYNY ELEKTRYCZNE 278 w wirniku oraz Ras w stojanie można wpływać zarówno na pochylenie
2tom131 5. MASZYNY ELEKTRYCZNE264265 Tablica 5.31. Współczynnik zwiększenia mocy silników przeznaczo
2tom132 5. MASZYNY ELEKTRYCZNE 266 gdzie: ap — liczba pierścieni ślizgowych w maszynie; vp — prędkoś
2tom133 5. MASZYNY ELEKTRYCZNE Tablica 5.33. Dane techniczne rozruszników olejowych serii ARf i ARd
2tom134 5. MASZYNY ELEKTRYCZNE 270 Za pomocą przełącznika gwiazda-trójkąt załącza się tylko silniki
2tom135 5. MASZYNY ELEKTRYCZNE 272 a) b) O
2tom136 5. MASZYNY ELEKTRYCZNE 274 Regulacja za pomocą rezystancji w obwodzie wirnika może być stos
2tom137 5. MASZYNY ELEKTRYCZNE 276 Przy tym sposobie hamowania prędkość obrotowa urządzenia napędzan
12 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) Rys. 6. Rozruch i praca silnika DC 1120kW
3tom054 p 110 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ Do regulacji temperatury pary są stosowane najczęś
3tom167 4. STACJE ELEKTROENERGETYCZNE 336 Do celów telemechaniki są stosowane następujące rodzaje łą
118 Maszyny Elektryczne - Zeszyty Problemowe Nr 3/2016 (111) Rys. 1. Silnik indukcyjny dużej mocy z
2tom228 5. MASZYNY ELEKTRYCZNE 458 W razie potrzeby należy ponadto stosować zabezpieczenia reagujące
116 Maszyny Elektryczne - Zeszyty Problemowe Nr 3/2016 (111) wykonywane są przy naprawach oraz moder
2tom165 5. MASZYNY ELEKTRYCZNE 332 na parę biegunów. Szczotki są połączone z suwakiem transformatora
PODSATWY DZIAŁANIA MASZYN ELEKTRYCZNYCH Podstawą działania maszyn elektrycznych i transformatorów są
Najwcześniej wynaleziono maszyny elektrostatyczne oraz maszyny działające na zasadzie indukcji
więcej podobnych podstron