2tom138
5. MASZYNY ELEKTRYCZNE 278
w wirniku oraz Ras w stojanie można wpływać zarówno na pochylenie charakterystyki, jak i na jej przesunięcie względem początku układu współrzędnych (rys. 5.31 b).
Hamowanie dynamiczne następuje po odłączeniu uzwojeń stojana od sieci i załączeniu ich do źródła prądu stałego, np. w sposób przedstawiony na rys. 5.32. Charakterystyka momentu obrotowego w zależności od prędkości obrotowej jest podobna jak w maszynie współpracującej z siecią symetryczną. Jednak moment maksymalny jest znacznie mniejszy niż moment krytyczny — nie przekracza 40% Mb. Poślizg, przy którym ten moment występuje jest też znacznie mniejszy niż poślizg krytyczny. Za pomocą opornika
0 rezystancji dodatkowej Ra w obwodzie wirnika można wpływać na nachylenie charakterystyki momentu.
W silnikach klatkowych bez wypierania prądu moment hamujący dynamiczny przy małym poślizgu jest stosunkowo mały.
5.2.4.7. Silniki indukcyjne specjalne
Specjalne silniki indukcyjne różnią się od silników ogólnego zastosowania formą wykonania, parametrami zasilania bądź specjalnymi właściwościami użytkowymi, jak np. zwiększonym elektromagnetycznym momentem rozruchowym początkowym, zwiększoną przeciążalnością, zmniejszonym poziomem głośności.
Silniki do wbudowania nic mają własnej obudowy ani własnego wału. Uzwojony rdzeń stojana oraz wirnika jest wmontowany w maszynę współpracującą, np. w obrabiarkę, spawarkę wirującą. W zależności od wykonania, silniki te po zabudowaniu muszą być podczas pracy przewietrzane (odpowiednik budowy chronionej) albo mogą być chłodzone tylko powierzchniowo (odpowiednik budowy zamkniętej).
Moc najczęściej stosowanych silników tej odmiany nic przekracza 7 kW przy prędkości obrotowej 1500 obr./min.
Silniki kołnierzowe niskiego napięcia o wale poziomym, np. w1 układzie IM 3001 oraz pionowym, np. w układzie IM 3011, są produkowane w takim samym zakresie mocy
1 prędkości obrotowej jak silniki wykonania podstawowego. Silniki kołnierzowe wysokiego napięcia o mocy większej niż ok. 250 kW są produkowane tylko do pracy z wałem pionowym.
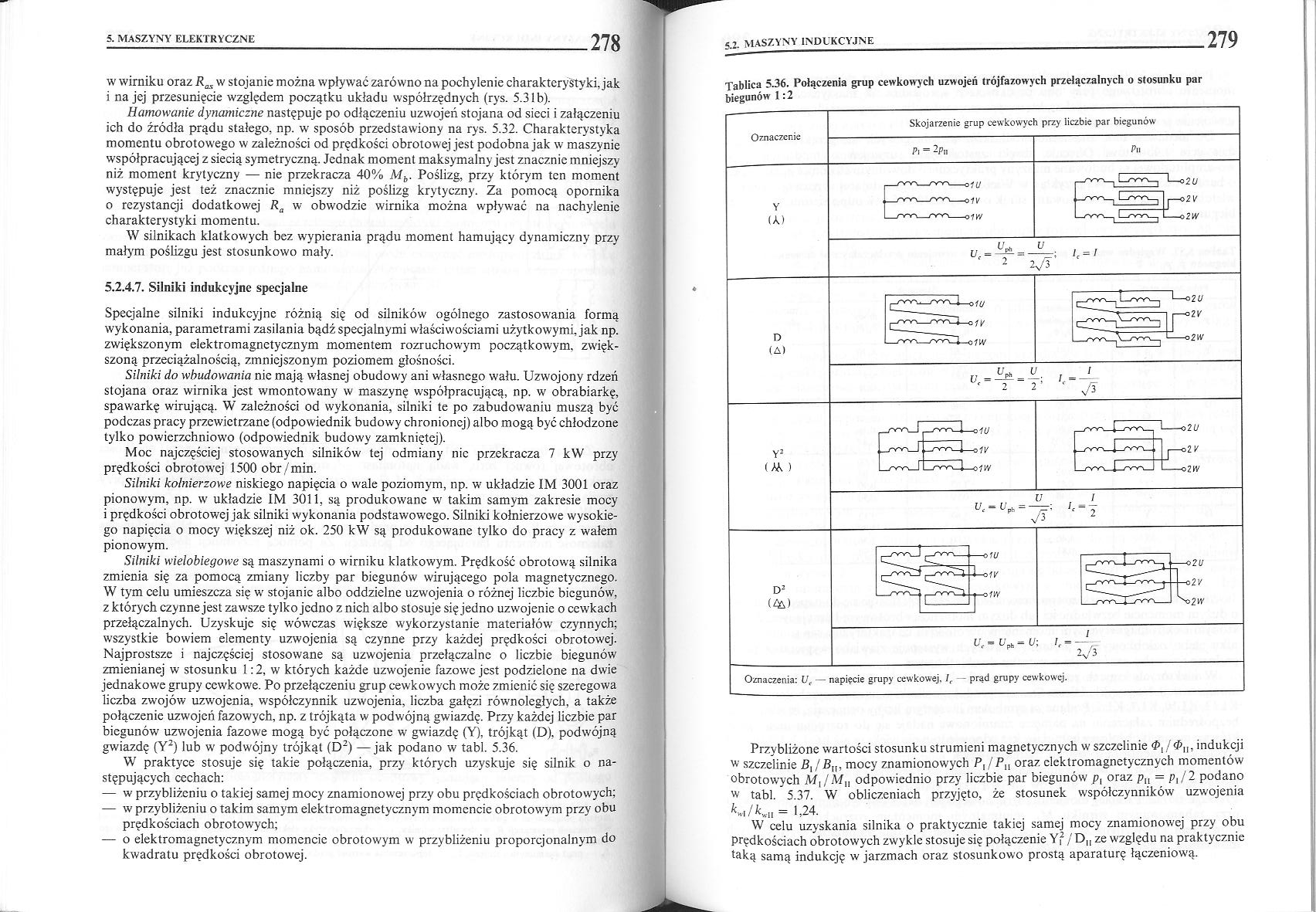
Silniki wielobiegowe są maszynami o wirniku klatkowym. Prędkość obrotową silnika zmienia się za pomocą zmiany liczby par biegunów wirującego pola magnetycznego. W tym celu umieszcza się w stojanie albo oddzielne uzwojenia o różnej liczbie biegunów, z których czynne jest zawsze tylko jedno z nich albo stosuje się jedno uzwojenie o cewkach przełączalnych. Uzyskuje się wówczas większe wykorzystanie materiałów czynnych; wszystkie bowiem elementy uzwojenia są czynne przy każdej prędkości obrotowej. Najprostsze i najczęściej stosowane są uzwojenia przełączalnc o liczbie biegunów zmienianej w stosunku 1:2, w których każde uzwojenie fazowe jest podzielone na dwie jednakowe grupy cewkowe. Po przełączeniu grup cewkowych może zmienić się szeregowa liczba zwojów uzwojenia, współczynnik uzwojenia, liczba gałęzi równoległych, a także połączenie uzwojeń fazowych, np. z trójkąta w podwójną gwiazdę. Przy każdej liczbie par biegunów uzwojenia fazowe mogą być połączone w gwiazdę (Y), trójkąt (D), podwójną gwiazdę (Y2) lub w podwójny trójkąt (D2) —jak podano w tabl. 5.36.
W praktyce stosuje się takie połączenia, przy których uzyskuje się silnik o następujących cechach:
— w przybliżeniu o takiej samej mocy znamionowej przy obu prędkościach obrotowych;
— w przybliżeniu o takim samym elektromagnetycznym momencie obrotowym przy obu prędkościach obrotowych;
— o elektromagnetycznym momencie obrotowym w przybliżeniu proporcjonalnym do kwadratu prędkości obrotowej.
Tablica 5.36. Połączenia grup cewkowych uzwojeń trójfazowych przelączalnych o stosunku par biegunów 1:2

Przybliżone wartości stosunku strumieni magnetycznych w szczelinie <PJ </>,,. indukcji 'v szczelinie Bl/Bn, mocy znamionowych P,/P„ oraz elektromagnetycznych momentów obrotowych M,/A/n odpowiednio przy liczbie par biegunów p, oraz p„ = p,/2 podano w tabl. 5.37. W obliczeniach przyjęto, że stosunek współczynników uzwojenia K,/Kn = 1,24.
W celu uzyskania silnika o praktycznie takiej samej mocy znamionowej przy obu prędkościach obrotowych zwykle stosuje się połączenie Yj2 / D„ ze względu na praktycznie taką samą indukcję w jarzmach oraz stosunkowo prostą aparaturę łączeniową.
Wyszukiwarka
Podobne podstrony:
Aspekty rozwoju małych maszyn elektrycznych 77 wany ich rozwój, który może wpływać negatywnie na sta
2tom136 5. MASZYNY ELEKTRYCZNE 274 Regulacja za pomocą rezystancji w obwodzie wirnika może być stos
2tom139 5. MASZYNY ELEKTRYCZNE 280 Połączenia Y,/D„ oraz D, / Y,2, są stosowane w silnikach o zbliżo
2tom126 5. MASZYNY ELEKTRYCZNE 254 i wirnika. Wykres kołowy sporządza się na podstawie wyników próby
2tom130 5. MASZYNY ELEKTRYCZNE 262 Rys. 5.16. Stopień obciążenia kp silnika w zależności od względne
2tom131 5. MASZYNY ELEKTRYCZNE264265 Tablica 5.31. Współczynnik zwiększenia mocy silników przeznaczo
2tom132 5. MASZYNY ELEKTRYCZNE 266 gdzie: ap — liczba pierścieni ślizgowych w maszynie; vp — prędkoś
2tom133 5. MASZYNY ELEKTRYCZNE Tablica 5.33. Dane techniczne rozruszników olejowych serii ARf i ARd
2tom134 5. MASZYNY ELEKTRYCZNE 270 Za pomocą przełącznika gwiazda-trójkąt załącza się tylko silniki
2tom135 5. MASZYNY ELEKTRYCZNE 272 a) b) O
2tom137 5. MASZYNY ELEKTRYCZNE 276 Przy tym sposobie hamowania prędkość obrotowa urządzenia napędzan
250 Zeszyty Problemowe - Maszyny Elektryczne Nr 72/2005 Tego rodzaju układ topologiczny pozwala na u
2tom228 5. MASZYNY ELEKTRYCZNE 458 W razie potrzeby należy ponadto stosować zabezpieczenia reagujące
usługowe oraz bank. Pieniądze można wymieniać w banku na różne waluty (galeony - złote; dublony: 17d
Pole stojana Pole wirnika ) Stóito V Uzwojenie stojanaIdea wirującej maszyny elektrycznej Wirnik
2tom123 5. MASZYNY ELEKTRYCZNE 248 — tarczowe o jednym stojanie i jednym wirniku -
2tom128 5. MASZYNY ELEKTRYCZNE -258 1. Uzwojenia fazowe stojana oznacza się litera
więcej podobnych podstron