2tom211
5. MASZYNY ELEKTRYCZNE 424
M. = — /vR2y + XL2 VA~ ViR+UXdsin9L+ URcosSL) (5.186)
P
Parametry eksploatacyjne i masa najednostkę mocy permasynów są najlepsze spośród wszystkich typów silników synchronicznych małej mocy.
Silniki reluktancyjne i reduktorowe
Silniki reluktancyjne to najprostsze, najtańsze i jednocześnie najtrwalsze silniki synchroniczne. Jednakże ich parametry eksploatacyjne (ą, cos <p) są gorsze niż innych silników synchronicznych. Moment elektromagnetyczny synchroniczny silników tego typu powstaje wskutek asymetrii magnetycznej wirnika. Z równania (5.184), przy {/, = 0, otrzymuje się
M. = •
U2
cos 2(XdX.+ R2)
-[-R(Xd-XJ2 +
P
+iX*~ X„) (Xdxq-R2)sw29L + R(Xy-X2q)cc,s23L] (5.187)
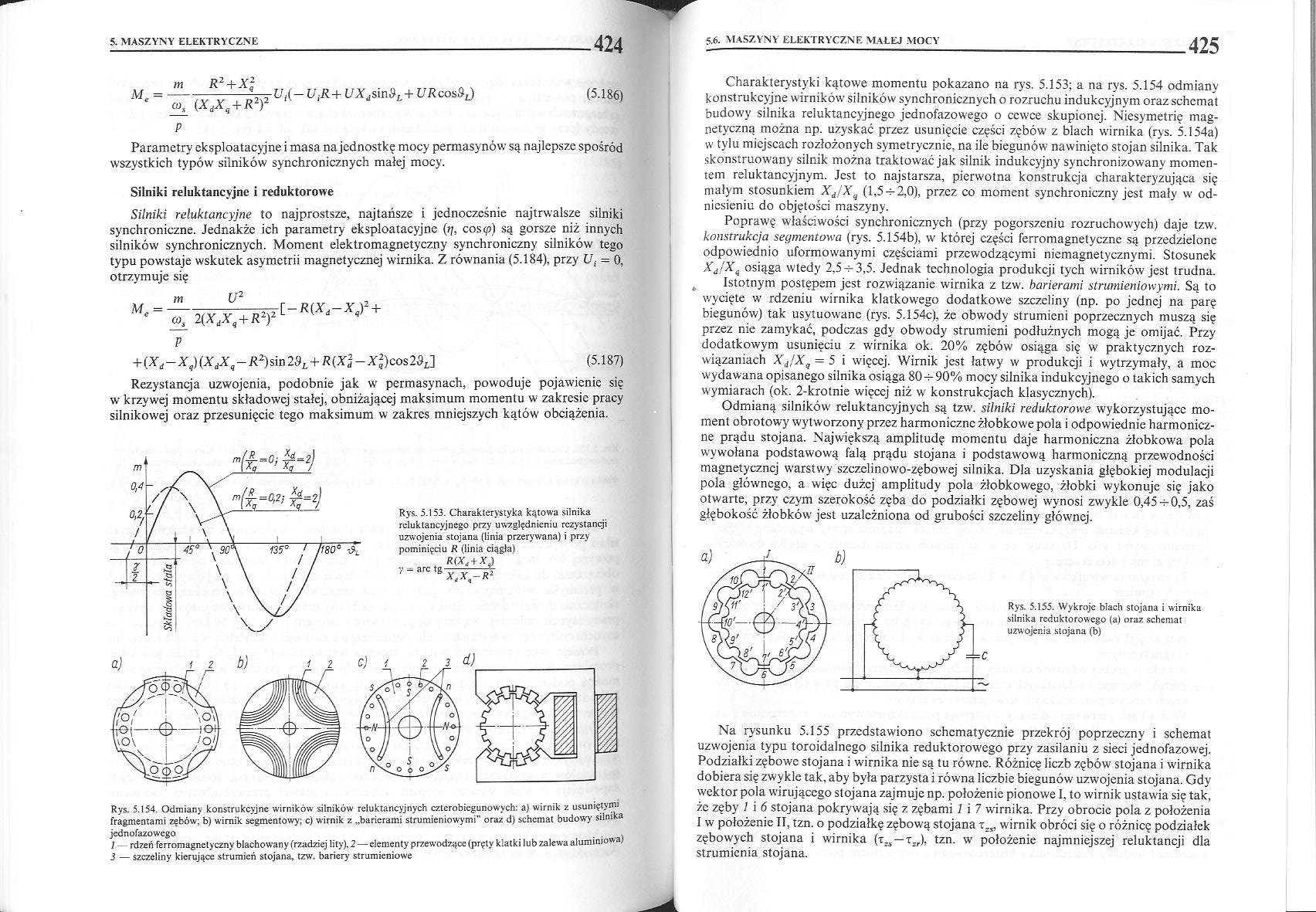
Rezystancja uzwojenia, podobnie jak w permasynach, powoduje pojawienie się w krzywej momentu składowej stałej, obniżającej maksimum momentu w zakresie pracy silnikowej oraz przesunięcie tego maksimum w zakres mniejszych kątów obciążenia.
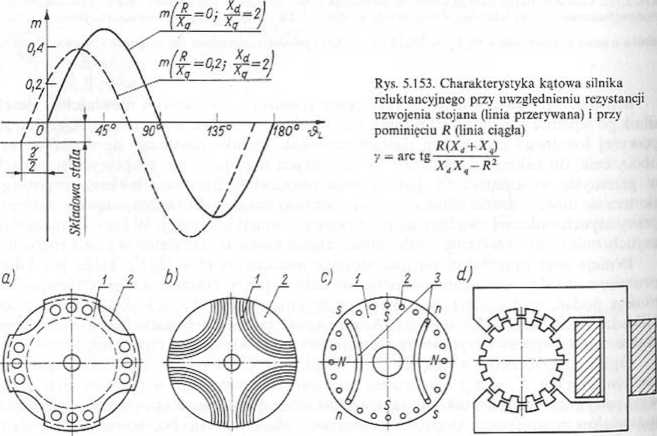
Rys. 5.154. Odmiany konstrukcyjne wirników silników reluktancyjnych cztcrobicgunowych: a) wirnik z usunięty1111 fragmentami zębów; b) wirnik segmentowy; c) wirnik z „barierami strumieniowymi" oraz d) schemat budowy silnika jednofazowego
1 — rdzeń ferromagnetyczny blachowany (rzadziej lity), 2 — elementy przewodzące (pręty klatki lub zalewa aluminiowa) 3 — szczeliny kierujące strumień stojana, tzw. bariery strumieniowe
Charakterystyki kątowe momentu pokazano na rys. 5.153; a na rys. 5.154 odmiany konstrukcyjne wirników silników synchronicznych o rozruchu indukcyjnym oraz schemat budowy silnika reluktancyjnego jednofazowego o cewce skupionej. Niesymetrię magnetyczną można np. uzyskać przez usunięcie części zębów z blach wirnika (rys. 5.154a) w tylu miejscach rozłożonych symetrycznie, na ile biegunów nawinięto stojan silnika. Tak skonstruowany silnik można traktować jak silnik indukcyjny synchronizowany momentem reluktancyjnym. Jest to najstarsza, pierwotna konstrukcja charakteryzująca się małym stosunkiem XdjXą (1,5 h-2,0), przez co moment synchroniczny jest mały w odniesieniu do objętości maszyny.
Poprawę właściwości synchronicznych (przy pogorszeniu rozruchowych) daje tzw. konstrukcja segmentowa (rys. 5.154b), w której części ferromagnetyczne są przedzielone odpowiednio uformowanymi częściami przewodzącymi niemagnetycznymi. Stosunek Xd!Xą osiąga wtedy 2,5 3,5. Jednak technologia produkcji tych wirników jest trudna.
Istotnym postępem jest rozwiązanie wirnika z tzw. barierami strumieniowymi. Są to wycięte w rdzeniu wirnika klatkowego dodatkowe szczeliny (np. po jednej na parę biegunów) tak usytuowane (rys. 5.154c), że obw'ody strumieni poprzecznych muszą się przez nie zamykać, podczas gdy obwody strumieni podłużnych mogą je omijać. Przy dodatkowym usunięciu z wirnika ok. 20% zębów osiąga się w praktycznych rozwiązaniach Xd/Xg = 5 i więcej. Wirnik jest łatwy w produkcji i wytrzymały, a moc wydawana opisanego silnika osiąga 80-t-90% mocy silnika indukcyjnego o takich samych wymiarach (ok. 2-krotnie więcej niż w konstrukcjach klasycznych).
Odmianą silników reluktancyjnych są tzw. silniki reduktorowe wykorzystujące moment obrotowy wytworzony przez harmoniczne żłobkowe pola i odpowiednie harmoniczne prądu stojana. Największą amplitudę momentu daje harmoniczna żłobkowa pola wywołana podstawową falą prądu stojana i podstawową harmoniczną przewodności magnetycznej warstwy szczelinowo-zębowej silnika. Dla uzyskania głębokiej modulacji pola głównego, a więc dużej amplitudy pola żłobkowego, żłobki wykonuje się jako otwarte, przy czym szerokość zęba do podziałki zębowej wynosi zwykle 0,45-r 0,5, zaś głębokość żłobków jest uzależniona od grubości szczeliny głównej.
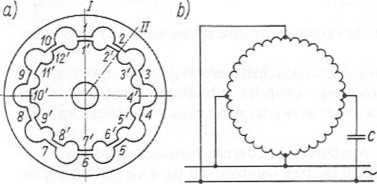
Rys. 5.155. Wykroje blach stojana i wirnika silnika reduktorowego (a) oraz schemat uzwojenia stojana (b)
Na rysunku 5.155 przedstawiono schematycznie przekrój poprzeczny i schemat uzwojenia typu toroidalnego silnika reduktorowego przy zasilaniu z sieci jednofazowej. Podziałki zębowe stojana i wirnika nie są tu równe. Różnicę liczb zębów stojana i wirnika dobiera się zwykle tak, aby była parzysta i równa liczbie biegunów uzwojenia stojana. Gdy wektor pola wirującego stojana zajmuje np. położenie pionowe I, to wirnik ustawia się tak, że zęby 1 i 6 stojana pokrywają się z zębami 1 i 7 wirnika. Przy obrocie pola z położenia I w położenie II, tzn. o podziałkę zębową stojana t,s, warnik obróci się o różnicę podzialek zębowych stojana i wirnika (t.s—r.r), tzn. w położenie najmniejszej reluktancji dla strumienia stojana.
Wyszukiwarka
Podobne podstrony:
2tom210 5. MASZYNY ELEKTRYCZNE 422 (tzw. kąt histerezy) o jaki pierwsza harmoniczna strumienia opóźn
2tom212 5. MASZYNY ELEKTRYCZNE 426 Redukcja prędkości wirnika w stosunku do prędkości synchronicznej
2tom213 5. MASZYNY ELEKTRYCZNE 428 Tablica 5.79. Dane techniczne mikrosilników synchronicznych jedno
2tom214 5. MASZYNY ELEKTRYCZNE 430 5. MASZYNY ELEKTRYCZNE 430 Rys. 5.159. Sposób połączenia uzwojeni
2tom215 5. MASZYNY ELEKTRYCZNE 432 że w granicznym przypadku wirnik silnika skokowego może opóźnić s
2tom216 5. MASZYNY ELEKTRYCZNE 434 Silniki skokowe o magnesach trwałych charakteryzuje stosunkowo du
2tom217 5. MASZYNY ELEKTRYCZNE 436 przyspieszonej, w którym co prawda silnik nadąża za powolnymi zmi
2tom218 5. MASZYNY ELEKTRYCZNE System powstawania maszyn elektrycznych reprezentuje etap konstruowan
2tom219 5. MASZYNY ELEKTRYCZNE 440 i---- Etap powstawania mo
Moduł 724[01].Z3 Maszyny elektryczne i układy napędowe 216 724[01].Z3.01 Eksploatowanie
być zakłady produkujące maszyny i urządzenia elektroenergetyczne, zakłady naprawy maszyn elektryczny
5. Maszyny elektryczne i układy napędowe 119 Eksploatowanie
Wszystkie maszyny elektryczne podlegają tym samym prawom elektrodynamiki - opisanymi równaniami Maxw
więcej podobnych podstron